A Coupled-Field Expansion Method for Single-Layer and Multilayer ...
17
Hindawi Publishing Corporation International Journal of Antennas and Propagation Volume 2012, Article ID 170963, 16 pages doi:10.1155/2012/170963 Research Article A Coupled-Field Expansion Method for Single-Layer and Multilayer Planar Periodic Structures Yading Li, 1, 2 Karu P. Esselle, 1 and Lvqian Zhang 2 1 Center for Electromagnetic and Antenna Engineering, Department of Electronic Engineering, Macquarie University, Sydney, NSW 2109, Australia 2 China Aerospace Science and Technology Corporation, Number 5 Academy, Number 513 Institute, Yantai 264000, China Correspondence should be addressed to Yading Li, [email protected] Received 10 July 2011; Accepted 28 December 2011 Academic Editor: Wei Hong Copyright © 2012 Yading Li et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A new, rigorous, field-based, seminumerical analysis method is presented to obtain the reflection and transmission coefficients of 2D planar periodic structures with arbitrarily shaped metallization patterns for both normal and oblique incidence conditions. It is useful for the analysis, design, and optimization of many single-layer and multilayer planar structures, such as frequency-selective surfaces (FSSs), artificial magnetic conductor (AMC) surfaces, electromagnetic bandgap (EBG) structures, some metamaterials and high-impedance surfaces. In this coupled-field expansion method (CFEM), the x- and y-components of the vector magnetic potential in each homogeneous region in a unit cell are expanded in terms of Bloch-Floquet modes and the solution to the coupled- field problem is formulated. The unique, analytical formulation presented here leads to a linear system with reasonably simple matrix elements. By cascading the matrices representing each interface, multilayer periodic structures are analyzed in a very flexible way. Being field based, CFEM does not require substrate Green’s functions to analyze surfaces printed on dielectric substrates. The method was validated by analyzing one single-layer periodic surface (a printed AMC on a dielectric substrate) and one multilayer periodic surface (a circular polarizer) and comparing CFEM results with HFSS results. 1. Introduction Periodic two-dimensional arrays of thin conducting patterns have been widely investigated as frequency-selective surfaces (FSS), artificial magnetic conductors (AMC), electromag- netic bandgap (EBG) structures, planar metamaterials, circu- lar polarizers, and high-impedance surfaces. Fully numerical methods, such as the finite-element method (FEM) [1] and the finite-difference time-domain (FDTD) [2] method com- pute the field distribution in a unit cell completely numeri- cally. The direct output of these methods, that is, numerical values of the fields at sampled points, does not indicate inter- esting information, such as which modes are propagating and which modes are evanescent, unless further processing is carried out. The Bloch-Floquet theorem, which describes the peri- odic electromagnetic wave distribution in periodic struc- tures, is an important starting point for many semianalytical methods. Periodic Green’s functions based on TE and TM polarized Bloch-Floquet expansions have been proposed and have been applied with the Method of Moments (MoM) to obtain the full-wave solution for 2D periodic arrays [3–8]. The electric or magnetic current distribution is the direct output of these methods. A single-layer FSS in free space was analyzed in [3] by combining TE and TM polarized Bloch-Floquet modes with the MoM. In [4], the MoM was extended for an FSS printed on a dielectric substrate. A set of entire-domain basis functions numerically calculated using the boundary integral resonant mode expansion (BI- RME) method was proposed for multilayer FSSs in [5]. In [6, 7], a Green’s function that takes into account the singular- ity at metal patch edges was exploited with entire-domain basis functions, and the singularity was treated analytically. A cascaded generalized scattering matrix was presented in [8] to efficiently solve multilayer problems. All these semiana- lytical methods solve an integral equation and compute the current distribution first. For substrate-based and printed structures, they require Green’s functions.
Transcript of A Coupled-Field Expansion Method for Single-Layer and Multilayer ...

Hindawi Publishing CorporationInternational Journal of Antennas and PropagationVolume 2012, Article ID 170963, 16 pagesdoi:10.1155/2012/170963
Research Article
A Coupled-Field Expansion Method for Single-Layer andMultilayer Planar Periodic Structures
Yading Li,1, 2 Karu P. Esselle,1 and Lvqian Zhang2
1 Center for Electromagnetic and Antenna Engineering, Department of Electronic Engineering, Macquarie University, Sydney,NSW 2109, Australia
2 China Aerospace Science and Technology Corporation, Number 5 Academy, Number 513 Institute, Yantai 264000, China
Correspondence should be addressed to Yading Li, [email protected]
Received 10 July 2011; Accepted 28 December 2011
Academic Editor: Wei Hong
Copyright © 2012 Yading Li et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
A new, rigorous, field-based, seminumerical analysis method is presented to obtain the reflection and transmission coefficients of2D planar periodic structures with arbitrarily shaped metallization patterns for both normal and oblique incidence conditions. It isuseful for the analysis, design, and optimization of many single-layer and multilayer planar structures, such as frequency-selectivesurfaces (FSSs), artificial magnetic conductor (AMC) surfaces, electromagnetic bandgap (EBG) structures, some metamaterialsand high-impedance surfaces. In this coupled-field expansion method (CFEM), the x- and y-components of the vector magneticpotential in each homogeneous region in a unit cell are expanded in terms of Bloch-Floquet modes and the solution to the coupled-field problem is formulated. The unique, analytical formulation presented here leads to a linear system with reasonably simplematrix elements. By cascading the matrices representing each interface, multilayer periodic structures are analyzed in a very flexibleway. Being field based, CFEM does not require substrate Green’s functions to analyze surfaces printed on dielectric substrates. Themethod was validated by analyzing one single-layer periodic surface (a printed AMC on a dielectric substrate) and one multilayerperiodic surface (a circular polarizer) and comparing CFEM results with HFSS results.
1. Introduction
Periodic two-dimensional arrays of thin conducting patternshave been widely investigated as frequency-selective surfaces(FSS), artificial magnetic conductors (AMC), electromag-netic bandgap (EBG) structures, planar metamaterials, circu-lar polarizers, and high-impedance surfaces. Fully numericalmethods, such as the finite-element method (FEM) [1] andthe finite-difference time-domain (FDTD) [2] method com-pute the field distribution in a unit cell completely numeri-cally. The direct output of these methods, that is, numericalvalues of the fields at sampled points, does not indicate inter-esting information, such as which modes are propagatingand which modes are evanescent, unless further processingis carried out.
The Bloch-Floquet theorem, which describes the peri-odic electromagnetic wave distribution in periodic struc-tures, is an important starting point for many semianalyticalmethods. Periodic Green’s functions based on TE and TM
polarized Bloch-Floquet expansions have been proposed andhave been applied with the Method of Moments (MoM) toobtain the full-wave solution for 2D periodic arrays [3–8].The electric or magnetic current distribution is the directoutput of these methods. A single-layer FSS in free spacewas analyzed in [3] by combining TE and TM polarizedBloch-Floquet modes with the MoM. In [4], the MoM wasextended for an FSS printed on a dielectric substrate. Aset of entire-domain basis functions numerically calculatedusing the boundary integral resonant mode expansion (BI-RME) method was proposed for multilayer FSSs in [5]. In[6, 7], a Green’s function that takes into account the singular-ity at metal patch edges was exploited with entire-domainbasis functions, and the singularity was treated analytically. Acascaded generalized scattering matrix was presented in [8]to efficiently solve multilayer problems. All these semiana-lytical methods solve an integral equation and compute thecurrent distribution first. For substrate-based and printedstructures, they require Green’s functions.

2 International Journal of Antennas and Propagation
In this paper, we present a new, rigorous, field-based,seminumerical, full-wave analysis method for analyzing sin-gle-layer/multilayer planar periodic structures by analyticallyexpanding the fields in each homogeneous region betweeninterfaces. In the development of this method, the conceptswere taken from established methods such as the MoM,Mode Matching Method, and Spectral Domain method. Inthis coupled-field expansion method (CFEM), the problemspace is divided into two/several homogeneous regionswhich are coupled. The coupling occurs through apertureareas (e.g., apertures) in the planar interface between regions.The x- and y-components of the vector magnetic potential ineach region is expanded using Bloch-Floquet modes. The un-known coefficients in the expansion are determined by ana-lytically enforcing interface conditions over the entire areathey are applicable. By characterizing each interface using amatrix and cascading the matrices, multilayer periodic struc-tures are analyzed in a very flexible way. As we solve forfields instead of currents, substrate Green’s functions are notrequired to analyze multilayer periodic structures on dielec-tric substrates.
The theory for single-layer conducting patterns is des-cribed in Section 2.2. Then, CFEM is extended for multilayercase in Section 2.3. To verify the accuracy of this method, wepresent numerical results for a printed AMC on a dielectricsubstrate and a multilayer circular polarizer, and compareCFEM results with HFSS results in Section 3. The CFEMresults agree very well with HFSS simulation results for nor-mal and oblique incidence. The surface designed by thismethod has been successfully employed in the small EBG-re-sonator antennas.
2. Thoery
2.1. Formulation of the Problem. Due to translational period-icity [9], we only need to analyze a unit cell of a 2D periodicstructure. The cross-section of a generic multilayer struc-ture, which is periodic in the x- and y-directions, is displayedin Figure 1. We denote each homogeneous layer by Ri,i = 1, . . . ,n, where n is the number of layers. R0, Rn+1 arethe upper and lower half spaces, respectively. The interfacebetween the Ri−1 and Ri regions, denoted by Si, is located atz = zi. All 2D periodic thin conducting patterns are locatedat these interfaces (although some interfaces can be simpledielectric interfaces without any conducting patterns). Eachhomogeneous layer Ri has a thickness of hi = zi+1 − zi. Thetheory presented in this paper is applicable to two types ofperiodic structures:
Type A: has a conducting pattern and/or a dielectricinterface at z = zn+1;
Type B: has a PEC ground plane at z = zn+1.
An FSS with multiple printed metal patterns is an exampleof a Type A structure. A multilayer AMC surface is a Type Bstructure.
······
S1
S2
Si
Si+1
Sn
Sn+1
hi
hn
h1
z1
z
z2
zi
zi+1
zn
zn+1
R0 (ε0, μ0)
Ri (εi, μi)
Rn (εn, μn)
Rn+1 (εn+1, μn+1)
(εR11, μ0)
Figure 1: Cross-section of a generic multilayer 2D periodic struc-ture.
The following notations are adopted throughout thispaper.
(a) �Ei = Eixx + Ei
y y + Eizz: the incident electric field in
Region R0.
(b) �Er = Erxx + Er
y y + Erzz: the reflected electric field in
Region R0 if the top conducting pattern at z = z1 werea complete PEC without any apertures. Note that, atz = z1, Ei
x + Erx = 0 and Ei
y + Ery = 0.
(c) M(Ri,Si)x : the x-component of the equivalent magnetic
currents at the top interface Si of region Ri.
(d) M(Ri,Si+1)x : the x-component of the equivalent mag-
netic currents at the bottom interface Si+1 of regionRi.
(e) �E(Ri)x = E(Ri)xx x + E(Ri)x
y y + E(Ri)xz z: the electric field
created by M(Ri ,Si)x and M(Ri,Si+1)
x in Region Ri.
(f) �E(Ri)s = �E(Ri)x + �E(Ri)y : the electric field in Region Ri
due to all equivalent magnetic currents.
(g) �E(Ri)tot = E(Ri)totx x+E(Ri)tot
y y+E(Ri)totz z: the total electric
field in Region Ri.
(h) A(Ri)x =A(Ri,Si)x+A(Ri ,Si+1)x: A(Ri)x is the x-compone-nt of the total magnetic vector potential in RegionRi. A(Ri ,Si)x and A(Ri,Si+1)x are the x-components ofthe magnetic vector potential created by the top andbottom equivalent magnetic currents, respectively, inRegion Ri.
(i) ε(Ri), μ(Ri): the permittivity and permeability of thedielectric in region Ri.
The total field in region R0 is given by
�E(Ri)tot = �E(Ri)s + �Ei + �Er , (1)

International Journal of Antennas and Propagation 3
z
zi = h
Si+1
Si
yx
zi+1 = 0
y
x
θ
z
−→k
Region i
φ
Figure 2: Typical region Ri. It is assumed that zi+1 = 0, zi = h.
where the scattered field �E(Ri)s is totally due to the magneticcurrents at the bottom interface, since there is no top inter-face for region R0. In other regions,
�E(Ri)tot = �E(Ri)s. (2)
In Type B structures, �E(Ri+1)tot = 0.In general, the conducting patterns on each interface have
different periodicity from each other. In such cases, a largerunit cell with an effective periodicity is defined. The unit cellof a multilayer structure is considered as a group of coupledregions. Each region is bounded by Bloch-Floquet period-ic boundaries on four sides. Let us take Region Ri, (1 � i �n), for example, as shown in Figure 2. The range of Ri iszi+1 � z � zi. In Figure 2, without any loss of generality, wehave assumed that zi+1 = 0 and zi = h to simplify the expla-nation. The apertures in the top and bottom interfaces (Siand Si+1) of Region Ri are replaced by equivalent magneticcurrents on PECs. The top equivalent magnetic currents
(M(Ri,Si)x ,M(Ri,Si)
y ) now appear in the aperture areas of SurfaceSi, just below the PEC at z = zi, while the bottom equivalent
magnetic currents (M(Ri,Si+1)x , M(Ri,Si+1)
y ) exist in the aperturesof Surface Si+1, just above the bottom PEC at z = zi+1.
2.2. Expansion of the Coupled Fields in a Unit Cell of a Single-Layer Periodic Structure. In order to develop CFEM step bystep, this subsection illustrates how to expand fields in eachhomogeneous region of a unit cell in a single-layer structure.For this purpose, we first transform the unit cell to two wave-guides. The unit cell, shown in Figure 4(a), is separatedinto two regions, Region R0 and Region R1, as shown inFigure 4(b). The metal pattern at z = h is replaced with a PECand equivalent magnetic currents in the aperture areas ofboth regions. Each region has Bloch-Floquet periodic boun-daries on four sides.
As shown in Figure 4(b), the range of Region R0 is z ∈[h, +∞). Its top is open and its bottom has equivalent magne-
tic currents, M(R0)x and M(R0)
y , just above a PEC. In Type Astructures, the range of Region R1 is z ∈ (−∞,h] with anopen boundary at the bottom. In Type B structures, the rangeof Region R1 is z ∈ [0,h] with a PEC at the bottom as shown
in Figure 4(b). In both cases, the top boundary of Region 1is a PEC at z = h. There exist equivalent magnetic currents,
M(R1)x , M(R1)
y , just below this PEC.Next we apply image theory to Region R0 and remove the
PEC surface at z = h, by doubling the magnetic currents.This transforms Region R0 to the “waveguide” shown inFigure 3(a), which has Bloch-Floquet periodic boundaries
on four sides, opened at two ends and excited by 2 �M(R0) =2M(R0)
x x + 2 �M(R0)y y at z = h. When image theory is applied
to Region R1 of a Type A structure, it is transformed to a
similar waveguide, but excited by 2 �M(R1) = 2M(R1)x x+2 �M(R1)
y yat z = h. Region R1 of a Type B structure is transformedto the waveguide shown in Figure 3(c), which is excited by
2 �M(R1) at z = h and their images at z = (2p + 1)h, p =. . . ,−2,−1, 1, 2, . . .. In our theory, we exploit the fact that theexcitation in Figure 3(c) can be realized by superposing theexcitation in Figure 3(c) at an infinite series of z coordinates.
To find the electromagnetic fields produced by magneticcurrents in Region R0 and Region R1 [10], we solve thefollowing wave equations for the magnetic vector potential(A) in the two corresponding waveguides:
∇2Ax + k2Ax = −2Mx
jωμδ(
z − zp+1
)
, (3)
∇2Ay + k2Ay = −2My
jωμδ(
z − zp+1
)
, (4)
�Es = − jωμ∇× �A, (5)
�Hs = ∇×∇× �A, (6)
where �A = Axx + Ay y and zp+1 = (2p + 1)h represent the zcoordinate of each layer of equivalent magnetic currents (i.e.,excitations in Figures 3(a) and 3(c)). δ(z− zp+1) is infinite atz = zp+1, otherwise it is zero.
The general solutions of (3) and (4), the inhomogeneous,second-order partial differential equations, are:
A(R0,R1)x =+∞∑
m,n=−∞a(R0,R1)xmn FX(m)FY(n)FZ(R0,R1)(m,n),
(7)
A(R0,R1)y =+∞∑
m,n=−∞a
(R0,R1)ymn FX(m)FY(n)FZ(R0,R1)(m,n).
(8)
Here, we select FX(m)FY(n) as eigenmodes of the waveguidebounded by Bloch-Floquet periodic boundary conditions.The sum of these modal functions, weighted with coefficients
a(R0,R1)x,ymn , gives the full-wave solution including all propa-
gating and evanescent waves. The subscript mn representsthe sequence of modal functions given below. These modalfunctions are the same in both regions:
FX(m) = e− jkmx, km = 2mπ
a+ kx,
FY(n) = e− jkn y , kn = 2nπb
+ ky ,(9)

4 International Journal of Antennas and Propagation
z
yx
z = h
(a)
z = 0
z
yx
(b)
...
...
z = 5h
z = 3h
z = h
z
yx
z = − h
z = −3h
(c)
...
...
......
z = 5h
z = 3h
z = h
z = 4h
z = 2hz
yx z = 0
z = −3h
z = −2h
−z = 4h
z = − h
(d)
Figure 3: Equivalent “waveguides” with Bloch periodic boundaries at four sides, opened at two ends; (a) excited by equivalent magneticcurrents at z = h; (b) excited by equivalent magnetic currents at z = 0; (c) excited by equivalent magnetic currents and their images atz = (2p + 1)h, p = . . . ,−1, 0, 1, . . .; (d) excited by equivalent magnetic currents and their images at z = (2p + 1)h and z = (2p)h, wherep = . . . ,−1, 0, 1, . . ..
where kx, ky are the x and y components of the incident wave
vector �k(R0); a is the lattice constant along the x direction; b isthe lattice constant along the y direction;m and n are integersfrom−∞ to +∞. In the special case of normal incidence, kx =ky = 0.
By substituting in the wave equation, one can prove thatthe FZ(R0)(m,n) in (7) is given by
FZ(R0)(m,n) = e−γ(R0)mn (z−h), (10)
where
(
γ(R0,R1)mn
)2 = k2m + k2
n −(
k(R0,R1))2
,
(
k(R0,R1))2 = ω2ε0ε(R0,R1)
r μ0μ(R0,R1)r .
(11)
For a Type A structure, FZ(R1)(m,n) is given by
FZ(R1)(m,n) = eγ(R1)mn (z−h). (12)

International Journal of Antennas and Propagation 5
Region R0
+
=
Region R1
h
h
z
yx
y
x
θ
z
−→
z
yx
k
φ
(a) (b)
Figure 4: (a) A unit cell. (b) Separation of a Type B unit cell into two regions. Region R0 is open at the top and has a PEC at the bottom.Equivalent magnetic currents (shown in light color at z = h) exist just above the bottom PEC. Region R1 has a PEC surface at the top andequivalent magnetic currents (shown in light color at z = h) exist just below the top PEC. For Type A structures, the bottom of Region R1 isopen (not shown here). For Type B structures, it is a PEC (as shown).
For a Type B structure, FZ(R1)(m,n) is given by
FZ(R1)(m,n) =+∞∑
p=0
[
eγ(R1)mn (z−(2p+1)h) + e−γ
(R1)mn (z+(2p+1)h)
]
.
(13)
To shorten the mathematical expressions, let us define twonew functions, F(R0,R1) and F(R0,R1)
d , to represent the 3D fieldmodes in (7) and their derivatives:
F(R0,R1)(m,n) = FX(m)FY(n)FZ(R0,R1)(m,n),
F(R0,R1)d (m,n) = FX(m)FY(n)FZ(R0,R1)
d (m,n),(14)
where
FZ(R0,R1)d (m,n) = −∂FZ(R0,R1)(m,n)
γ(R0,R1)mn ∂z
. (15)
At z = h,
FZ(R0)d = 1,
FZ(R1)d = −1.
(16)
The electric and magnetic fields produced by the magneticcurrents in each region are obtained by substituting (7) and(8) into (5) and (6):
E(R0,R1)xx = 0,
E(R0,R1)xy =
+∞∑
m,n=−∞a(R0,R1)xmn
(
jωμ(R0,R1)γ(R0,R1)mn
)
F(R0,R1)d (m,n),
H(R0,R1)xx =
+∞∑
m,n=−∞a(R0,R1)xmn
(
(
k(R0,R1))2 − (km)2
)
×F(R0,R1)(m,n),
H(R0,R1)xy =
+∞∑
m,n=−∞a(R0,R1)xmn (−kmkn)F(R0,R1)(m,n),
E(R0,R1)yx =
+∞∑
m,n=−∞a
(R0,R1)ymn
(
− jωμ(R0,R1)γ(R0,R1)mn
)
×F(R0,R1)d (m,n),
E(R0,R1)yy = 0,
H(R0,R1)yx =
+∞∑
m,n=−∞a
(R0,R1)ymn (−kmkn)F(R0,R1)(m,n),

6 International Journal of Antennas and Propagation
H(R0,R1)yy =
+∞∑
m,n=−∞a
(R0,R1)ymn
(
(
k(R0,R1))2 − (kn)2
)
×F(R0,R1)(m,n).
(17)
2.3. Coupled-Field Expansion for a Unit Cell of a MultilayerPeriodic Structure. Region Ri, shown in Figure 2, is the gene-ralized case of Region R0 and Region R1 in Section 2.2. Thissubsection extends the field expansion in Section 2.2 to themultilayer case. Let us first apply image theory to Region Ri.
Its top equivalent magnetic currents M(Ri,Si)x , M(Ri ,Si)
y are dou-bled when the top PEC at z = zi is removed. The same appliesto its bottom equivalent magnetic currents M(Ri,Si+1)
x , M(Ri,Si+1)y
when the bottom PEC at z = zi+1 is removed. In addi-tion, multiple images of these currents appear in an infinitenumber of surfaces. This transforms Region Ri to a waveg-uide with Bloch-Floquet periodic boundaries at the foursides, excited by 2M(Ri ,Si)
x and 2M(Ri ,Si)y at z = zi and a series of
their images at z = zi + (2p)hi, as well as 2M(Ri,Si+1)x , 2M(Ri,Si+1)
y
at z = zi+1 and a series of their images at z = zi+1 + (2p)hi,where p = . . . ,−2,−1, 1, 2, . . .. This excitation scheme for atypical Region i is shown in Figure 3(d).
As the top and bottom regions are different from a typicalregion, shown in Figure 2, we need to consider four types of“waveguides”, as follows.
(1) For i = 0, Region R0 leads to the “waveguide” inFigure 3(a) because the top of this region is open andhence there are no magnetic currents on the top. Thishas only one layer of magnetic currents.
(2) In Type A structures, for i = n + 1, Region Rn+1 leadsto the “waveguide” in Figure 3(b) because the bottomof this region is open. In Type B structures, there is nofield in this region as Surface Sn+1 is a PEC.
(3) In Type B structures, for i = n, Region Rn leads to the“waveguide” in Figure 3(c) because Surface Sn+1 is acomplete PEC without apertures and hence there areno equivalent magnetic currents on it.
(4) All other typical regions have metallic patterns atboth top and bottom, which leads to the generic“waveguide” in Figure 3(d).
Note that the last type of “waveguide” is required only formultilayer structures. We exploit the fact that the excitationsin Figure 3(d) can be realized by shifting and superposingthe excitations in Figures 3(a) and 3(b) at an infinite periodicseries of z-coordinates.
To find the electromagnetic fields in Region Ri producedby magnetic currents on Surfaces Si and Si+1, we solve thefollowing wave equations for the magnetic vector potential(A(Ri)) in the corresponding waveguides:
∇2A(Ri)x +(
k(Ri))2
A(Ri)x
= −2M(Ri ,Si)
x δ(
z − zi − zp)
+ 2M(Ri ,Si+1)x δ
(
z − zi+1 − zp)
jωμ(Ri),
(18)
∇2A(Ri)y +(
k(Ri))2
A(Ri)y
= −2M(Ri ,Si)
y δ(
z − zi − zp)
+ 2M(Ri ,Si+1)y δ
(
z − zi+1 − zp)
jωμ(Ri),
(19)
�E(Ri)s = − jωμ(Ri)∇× �A(Ri), (20)
�H(Ri)s = ∇×∇× �A(Ri), (21)
where �A(Ri) = A(Ri)xx + A(Ri)y y and zp = (2p)hi, p =. . . ,−2,−1, 0, 1, 2, . . .. δ(z − zi − (2p)hi) is infinite at z =zi+(2p)hi, otherwise, it is zero. δ(z−zi+1−(2p)hi) is infinite atz = zi+1 + (2p)hi, otherwise it is zero. The series of z = zi + zpand z = zi+1 + zp represents the z coordinate of each layerof equivalent magnetic currents. (i.e., excitations in Figures3(a), 3(b), 3(c), and 3(d)).
The magnetic potentials produced by the equivalentmagnetic currents in the typical waveguide in Figure 3(d)can be expressed as a linear superposition of the potentialscreated by the equivalent magnetic currents at the twointerfaces (z = zi and z = zi+1), and their correspondingseries of images. So, let us separate them as
A(Ri)y =A(Ri ,Si+1)y + A(Ri,Si)y ,
A(Ri)x =A(Ri,Si+1)x + A(Ri,Si)x.(22)
Now, we expand these potentials as
A(Ri ,Si+1)y =+∞∑
m,n=−∞a
(Ri,Si+1)ymn FX(m)FY(n)FZ(Ri ,Si+1)(m,n),
(23)
A(Ri ,Si)y =+∞∑
m,n=−∞a
(Ri ,Si)ymn FX(m)FY(n)FZ(Ri ,Si)(m,n),
(24)
A(Ri,Si+1)x =+∞∑
m,n=−∞a(Ri,Si+1)xmn FX(m)FY(n)FZ(Ri ,Si+1)(m,n),
(25)
A(Ri ,Si)x =+∞∑
m,n=−∞a(Ri ,Si)xmn FX(m)FY(n)FZ(Ri ,Si)(m,n),
(26)
where FX(m) and FY(n) are defined in (9).In (23)–(26), FZ(Ri ,Si+1)(m,n) and FZ(Ri,Si)(m,n) are given
by
FZ(Ri ,Si+1)(m,n) =+∞∑
p=0
[
eγ(Ri)mn (z−zi+1−(2p)hi) + e−γ
(Ri)mn (z−zi+1+(2p)hi)
]
,
FZ(Ri ,Si)(m,n) =+∞∑
p=0
[
eγ(Ri)mn (z−zi−(2p)hi) + e−γ
(Ri)mn (z−zi+(2p)hi)
]
,
(27)

International Journal of Antennas and Propagation 7
where(
γ(Ri)m,n
)2 = (km)2 + (kn)2 −(
k(Ri))2
,
(
k(Ri))2 = ω2μ(Ri)ε(Ri).
(28)
To shorten the mathematical expressions, let us definefour new functions, F(Ri ,Si+1), F(Ri ,Si), F(Ri,Si+1)
d , and F(Ri ,Si)d to
represent the 3D field modes in (23) and (26), and theirderivatives:
F(Ri,Si+1)(m,n) = FX(m)FY(n)FZ(Ri ,Si+1)(m,n),
F(Ri ,Si)(m,n) = FX(m)FY(n)FZ(Ri ,Si)(m,n),
F(Ri,Si+1)d (m,n) = FX(m)FY(n)FZ(Ri ,Si+1)
d (m,n),
F(Ri ,Si)d (m,n) = FX(m)FY(n)FZ(Ri ,Si)
d (m,n),
(29)
where
FZ(Ri ,Si+1)d (m,n) = − 1
γ(Ri)mn
· ∂FZ(Ri ,Si+1)(m,n)
∂z,
FZ(Ri ,Si)d (m,n) = 1
γ(Ri)mn
· ∂FZ(Ri ,Si)(m,n)∂z
.
(30)
It can be shown that, at z = zi,
FZ(Ri ,Si+1)d = 0,
FZ(Ri ,Si)d = 1.
(31)
Similarly, at z = zi+1,
FZ(Ri ,Si+1)d = 1,
FZ(Ri ,Si)d = 0.
(32)
For further compactness, let us define three operators:
Γ(Si)m,na
[
f (x)] =
∫∫
apf (x)FX∗(m)FY∗(n)dx dy, (33)
Γ(Si)m,np
[
f (x)] =
∫∫
patchf (x)FX∗(m)FY∗(n)dx dy, (34)
Γ(Si)m,nu
[
f (x)] =
∫∫
unitf (x)FX∗(m)FY∗(n)dx dy, (35)
where f (x) is an arbitrary function.∫∫
ap,∫∫
patch, and∫∫
unitrepresent the integration over the aperture areas, metalpatch areas, and the whole unit cell area at the interfaceSi, respectively. The operator Γ(Si)m,n
u satisfies the followingorthogonality:
Γ(Si)m,nu [FX(m′)FY(n′)] =
{
ab, m′ = m, n′ = n,
0, otherwise.(36)
Because the integration area of a unit cell is equal to the sumof its aperture area and patch area,
Γ(Si)m,nu
[
f (x)] = Γ(Si)m,n
a
[
f (x)]
+ Γ(Si)m,np
[
f (x)]
. (37)
In the following subsections, various interface continuitiesare enforced, in order to find the unknown coefficientsa
(Ri,Si+1)x,ymn and a
(Ri,Si)x,ymn in (23)–(26).
Since Region Ri is the generalized case of Region R0 andR1 in Section 2.2, we will enforce the boundary conditions onSurface Si.
2.4. Enforcing the Tangential Electric Field to Be Continuousacross Apertures in Surface Si. Let us consider Region Ri−1,and apply operator (35) to both sides of (48) at z = zi. Theresult is
Γ(Si)m,nu
[
E(Ri−1)yx
]
= Γ(Si)m,nu
⎡
⎣
+∞∑
m′,n′=−∞
(
jωμ(Ri−1)γ(Ri−1)m′n′
)
·(
a(Ri−1,Si−1)ym′n′ F(Ri−1,Si−1)
d
−a(Ri−1,Si)ym′n′ F(Ri−1,Si)
d
)
⎤
⎦.
(38)
Due to the orthogonality in (36), only the m′ = m, n′ = nterm is nonzero on the right-hand side. Then, considering
that F(Ri−1,Si−1)d |z=zi ≡ 0 and F(Ri−1,Si)
d |z=zi ≡ 1 as given in (32),we have
Γ(Si)m,nu
[
E(Ri−1)yx
]
= a(Ri−1,Si)ymn
(
− jωμ(Ri−1)γ(Ri−1)mn
)
ab. (39)
Therefore,
a(Ri−1,Si)ymn =
Γ(Si)m,nu
[
E(Ri−1)yx
]
− jωμ(Ri−1)γ(Ri−1)mn ab
. (40)
Similarly, we can derive the following expressions by apply-ing the operator (35) to (48) for Region Ri and applying (35)to (53) for Region Ri−1 and Region Ri:
a(Ri ,Si)ymn =
Γ(Si)m,nu
[
E(Ri)yx
]
jωμ(Ri)γ(Ri)mn ab
, (41)
a(Ri−1,Si)xmn =
Γ(Si)m,nu
[
E(Ri−1)xy
]
jωμ(Ri−1)γ(Ri−1)mn ab
, (42)
a(Ri,Si)xmn =
Γ(Si)m,nu
[
E(Ri)xy
]
− jωμ(Ri)γ(Ri)mn ab
. (43)
Let us consider the interface Si in a typical region Ri−1
(i − 1 /= 0,n). The x-component of the total electric field on
this plane is given by E(Ri−1)totx = E(Ri−1)x
x + E(Ri−1)yx . Then, as
x-directed magnetic currents do not produce an x-directed
electric field on the same plane (see (26)), E(Ri−1)xx = 0, and,
therefore, E(Ri−1)totx = E
(Ri−1)yx at this plane at z = zi. Similarly,
we have E(Ri)totx = E
(Ri)yx for Region Ri at the same plane at
z = zi. Since the tangential components of the total electricfield are zero on the metal areas of the interface, and they arecontinuous in the aperture areas of the interface, we find that
Γ(Si)m,nu
[
E(Ri−1)yx
]
= Γ(Si)m,nu
[
E(Ri)yx
]
, (44)
Γ(Si)m,nu
[
E(Ri−1)xy
]
= Γ(Si)m,nu
[
E(Ri)xy
]
. (45)
In region R0, the x-component of the total electric field isthe sum of the x-components of the incident field (Ei
x),

8 International Journal of Antennas and Propagation
the reflected field (Erx), and the scattered field. However, at
the S1 interface, Eix and Er
x cancel out due to the PEC, andhence the above relationships are valid also for region R0 atinterface S1.
Let us substitute (44) into (40)-(41) and make a simplerearrangement which leads to the following relationshipbetween the amn coefficients for the two coupled regions Ri
and Ri+1:
b(Si)ymn = a
(Ri−1,Si)ymn
(
− jωμ(Ri−1)γ(Ri−1)mn
)
= a(Ri ,Si)ymn
(
jωμ(Ri)γ(Ri)mn
)
,
(46)
where b(Si)ymn is a new unknown coefficient, which will replace
both a(Ri)mn and a(Ri−1)
mn eventually.Similarly, considering Ey in (45) and (42)-(43), we have
b(Si)xmn = a(Ri−1,Si)x
mn
(
jωμ(Ri−1)γ(Ri−1)mn
)
= a(Ri ,Si)xmn
(
− jωμ(Ri)γ(Ri)mn
)
.
(47)
Note that the above two equations establish a simple rela-tionship between the coefficients in Region Ri−1 and those inRegion Ri at z = zi. We have exploited this relationship to
introduce a new set of unknown coefficients b(Si)ymn and b(Si)x
mn ,which are common to both regions. Note that the coefficients
b(Si)xmn and b
(Si)ymn are associated with the ith interface whereas
the former coefficients a(Ri ,Sj )mn are associated with both the
regions and interfaces.Let us substitute (46) and (47) in (23)–(26). The electric
and magnetic fields produced by the magnetic currentsin each region are obtained by substituting these newexpressions for the magnetic vector potentials in (20) and(21):
E(Ri)yx =
+∞∑
m′,n′=−∞b
(Si+1)ym′n′ F(Ri ,Si+1)
d (m′,n′)
++∞∑
m′,n′=−∞b
(Si)ym′n′F
(Ri ,Si)d (m′,n′),
(48)
E(Ri)yy = 0, (49)
H(Ri)yx =
+∞∑
m′,n′=−∞b
(Si+1)ym′n′
(−km′kn′)F(Ri,Si+1)(m′,n′)
− jωμ(Ri)γ(Ri)m′n′
++∞∑
m′,n′=−∞b
(Si)ym′n′
(−km′kn′)F(Ri,Si)(m′,n′)
jωμ(Ri)γ(Ri)m′n′
,
(50)
H(Ri)yy =
+∞∑
m′,n′=−∞b
(Si+1)ym′n′
(
(
k(Ri))2 − k2
n′
)
F(Ri,Si+1)(m′,n′ )
− jωμ(Ri)γ(Ri)m′n′
++∞∑
m′,n′=−∞b
(Si)ym′n′
(
(
k(Ri))2 − k2
n′
)
F(Ri ,Si)(m′,n′)
jωμ(Ri)γ(Ri)m′n′
,
(51)
E(Ri)xx = 0, (52)
E(Ri)xy =
+∞∑
m′,n′=−∞b(Si+1)xm′n′ F(Ri,Si+1)
d (m′,n′)
++∞∑
m′,n′=−∞b(Si)xm′n′F
(Ri,Si)d (m′,n′),
(53)
H(Ri)xx =
+∞∑
m′,n′=−∞b(Si+1)xm′n′
(
(
k(Ri))2 − k2
m′
)
F(Ri ,Si+1)(m′,n′)
jωμ(Ri)γ(Ri)m′n′
++∞∑
m′,n′=−∞b(Si)xm′n′
(
(
k(Ri))2 − k2
m′
)
F(Ri ,Si)(m′,n′)
− jωμ(Ri)γ(Ri)m′n′
,
(54)
H(Ri)xy =
+∞∑
m′,n′=−∞b(Si+1)xm′n′
(−km′kn′)F(Ri,Si+1)(m′,n′)
jωμ(Ri)γ(Ri)m′n′
++∞∑
m′,n′=−∞b(Si)xm′n′
(−km′kn′)F(Ri,Si)(m′,n′)
− jωμ(Ri)γ(Ri)m′n′
.
(55)
2.5. Enforcing the Tangential Electric Field to Be Zero on theMetal Patch Areas in Surface Si. As the tangential electricfield is zero on the metal patch areas of the interface,
Γ(Si)m,np [E
(Ri−1)yx ] = 0 and Γ(Si)m,n
u [E(Ri−1)yx ] = Γ(Si)m,n
a [E(Ri−1)yx ].
Hence, we can replace Γ(Si)m,nu in (40) by Γ(Si)m,n
a as we only
consider E(Ri−1)yx at z = zi. In other words, the integration
area in (40) can be reduced to the aperture area:
a(Ri−1,Si)ymn =
Γ(Si)m,na
[
E(Ri−1,Si)yx
]
− jωμ(Ri−1)γ(Ri−1)mn ab
. (56)
Similarly, one may prove that
a(Ri,Si)ymn =
Γ(Si)m,na
[
E(Ri)yx
]
jωμ(Ri)γ(Ri)mn ab
, (57)
a(Ri−1,Si)xmn =
Γ(Si)m,na
[
E(Ri−1)xy
]
jωμ(Ri−1)γ(Ri−1)mn ab
, (58)
a(Ri ,Si)xmn =
Γ(Si)m,na
[
E(Ri)xy
]
− jωμ(Ri)γ(Ri)mn ab
. (59)
Let us replace a(Ri−1,Si)ymn (− jωμ(Ri−1)γ(Ri−1)
mn ) in (56) using b(Si)ymn
and expand E(Ri−1,Si)yx in (56) using (48). We obtain
b(Si)ymn =
∑+∞m′,n′=−∞ b
(Si)ym′n′Λ
(m,n,m′,n′)ap(Si)
ab. (60)

International Journal of Antennas and Propagation 9
Note that (57) leads to the same equation (60), when theabove steps are followed.
Similarly, substitution of (47) and (53) in (58)-(59) leadsto
b(Si)xmn =
∑+∞m′,n′=−∞ b(Si)x
m′n′Λ(m,n,m′,n′)ap(Si)
ab, (61)
where
Λ(m,n,m′,n′)ap(Si) = Γ(Si)m,n
a [FX(m′)FY(n′)]. (62)
Note that the same integral (62) appears in both (60)-(61).
2.6. Enforcing the Tangential Magnetic Field to Be Continuousacross the Aperture Areas in Surface Si. The total Hy in regionR0 is
H(R0)toty = H(R0)x
y + H(R0)yy + Hi
y + Hry , (63)
where Hiy and Hr
y are the y-components of the magnetic fieldof incident and reflected waves in region R0. At the interfaceS1, Hr
y = Hiy due to the PEC, and hence
H(R0)toty = H(R0)x
y + H(R0)yy + 2Hi
y. (64)
The total Hy in a typical region, Ri, 1 < i < n + 1 is
H(Ri)toty = H(Ri)x
y + H(Ri)yy . (65)
Now let us apply operator Γ(S1)m,na to (64):
Γ(S1)m,na
[
H(R0)toty
]
= Γ(S1)m,na
[
H(R0)xy + H
(R0)yy + 2Hi
y
]
. (66)
Next, we consider the interface S1 and Region R1 below it. So,
we set i = 1 in (65) and apply the same operator Γ(S1)m,na :
Γ(S1)m,na
[
H(R1)toty
]
= Γ(S1)m,na
[
H(R1)xy + H
(R1)yy
]
. (67)
Since the magnetic field is continuous across the aperture
at interface S1, Γ(S1)m,na [H(R0)tot
y ] = Γ(S1)m,na [H(R1)tot
y ]. So, wesubtract (67) from (66). After simply rearranging the se-quence of terms, we obtain
Γ(S1)m,na
[
−2Hiy
]
= Γ(S1)m,na
[
H(R0)xy + H
(R0)yy −H(R1)x
y −H(R1)yy
]
=(
Γ(S1)m,nu − Γ(S1)m,n
p
)[
H(R0)xy + H
(R0)yy −H(R1)x
y −H(R1)yy
]
.
(68)
Note that Γ(S1)m,na = Γ(S1)m,n
u − Γ(S1)m,np due to (37). Similarly
the continuity of the tangential component of the magneticfield across the apertures at the other typical interfaces (Si,i > 1) leads to
0 = Γ(Si)m,na
[
H(Ri−1)xy + H
(Ri−1)yy −H(Ri)x
y −H(Ri)yy
]
=(
Γ(Si)m,nu − Γ(Si)m,n
p
)
×[
H(Ri−1)xy + H
(Ri−1)yy −H(Ri)x
y −H(Ri)yy
]
.
(69)
Let us repeat this process with Hx. At interface S1, therelationship is
Γ(S1)m,na
[
−2Hix
]
= Γ(S1)m,na
[
H(R0)xx + H
(R0)yx −H(R1)x
x −H(R1)yx
]
=(
Γ(S1)m,nu − Γ(S1)m,n
p
)[
H(R0)xx + H
(R0)yx −H(R1)x
x −H(R1)yx
]
.
(70)
For any other typical interface Si, i > 1,
0 = Γ(Si)m,na
[
H(Ri−1)xx + H
(Ri−1)yx −H(Ri)x
x −H(Ri)yx
]
=(
Γ(Si)m,nu − Γ(Si)m,n
p
)
×[
H(Ri−1)xx + H
(Ri−1)yx −H(Ri)x
x −H(Ri)yx
]
.
(71)
Next, we express all terms inside the Γ(Si)m,nu − Γ(Si)m,n
p
operator in the right-hand side of (68)–(71) in terms of
unknowns bx,ymn. Let us start from Γ(Si)m,n
u [H(Ri−1)xy ] in (69).
Replacing i in (55) with i− 1 and then applying the operator,we obtain
Γ(Si)m,nu
[
H(Ri−1)xy
]
= Γ(Si)m,nu
⎡
⎣
+∞∑
m′,n′=−∞b(Si)xm′n′
(−km′kn′)F(Ri−1,Si)(m′,n′)
jωμ(Ri−1)γ(Ri−1)m′n′
++∞∑
m′,n′=−∞b(Si−1)xm′n′
(−km′kn′)F(Ri−1,Si−1)(m′,n′)
− jωμ(Ri−1)γ(Ri−1)m′n′
⎤
⎦.
(72)
Due to the orthogonality in (36), only the m′ = m, n′ = nterm is nonzero on the right-hand side. Hence,
Γ(Si)m,nu
[
H(Ri−1)xy
]
= (−kmkn)b(Si)xmn ζm,n
(Ri−1,Si)ab
jωμ(Ri−1)γ(Ri−1)mn
+(−kmkn)b(Si−1)x
mn ζm,n(Ri−1,Si−1)ab
− jωμ(Ri−1)γ(Ri−1)mn
,
(73)
where
ζm,n(Ri−1,Si) = FZ(Ri−1,Si)(m,n)|z=zi ,ζm,n
(Ri,Si) = FZ(Ri ,Si)(m,n)|z=zi .(74)
Next b(Si)xmn and b(Si−1)x
mn are expanded using (61). Similarly,
we apply operator Γ(Si)m,np to H(Ri)x
y in Region Ri−1. The resultis
Γ(Si)m,np
[
H(Ri−1)xy
]
=+∞∑
m′,n′=−∞
(−km′kn′)b(Si)xm′n′ζ
m′,n′(Ri−1,Si)
(
Λ−Λ(m,n,m′,n′)ap(Si)
)
jωμ(Ri−1)γ(Ri−1)m′n′
++∞∑
m′,n′=−∞
(−km′kn′)b(Si−1)xm′n′ ζm
′,n′(Ri−1,Si−1)
(
Λ−Λ(m,n,m′,n′)ap(Si)
)
− jωμ(Ri−1)γ(Ri−1)m′n′
,
(75)
where Λ = ab when m = m′, n = n′, otherwise Λ = 0.We similarly expand the other terms in (68)–(71) and
express the right-hand side of all these equations in termsof b
x,ymn.

10 International Journal of Antennas and Propagation
2.7. Building a Linear System of Equations. The linear systemwill be based on the expanded versions of (68)–(71).
2.7.1. Intermediate Interfaces Si. The matrix relationshipdeveloped in this subsection applies to all intermediate,typical surfaces Si. For Type A structures, they range fromi = 2, . . . ,n and, for Type B structures, i = 2, . . . ,n− 1.
Let us define three column vectors to represent unkno-wns in (69) and (71):
B(Si−1) =[
B(Si−1)y
B(Si−1)x
]
, B(Si) =[
B(Si)y
B(Si)x
]
,
B(Si+1) =[
B(Si+1)y
B(Si+1)x
]
,
(76)
where
B(Si−1)y =[
. . . , b(Si−1)ym′n′ , . . .
]′; B(Si−1)x =
[
. . . , b(Si−1)xm′n′ , . . .
]′,
B(Si)y =[
. . . , b(Si)ym′n′ , . . .
]′; B(Si)x =
[
. . . , b(Si)xm′n′ , . . .
]′,
B(Si+1)y =[
. . . , b(Si+1)ym′n′ , . . .
]′; B(Si+1)x =
[
. . . , b(Si+1)xm′n′ , . . .
]′,
(77)
and m′, n′ are from −∞ → ∞.By substituting expansions (73)-(75), and so forth in
(69) and (71), we obtain the linear subsystem for eachintermediate layer:
0 =[
Z(Si−1)Si Z(Si)
Si Z(Si+1)Si
]
·⎡
⎢
⎣
B(Si−1)
B(Si)
B(Si+1)
⎤
⎥
⎦, (78)
where
Z(Si−1)Si =
⎡
⎢
⎣
O(Si−1)ySi P(Si−1)x
Si
Q(Si−1)ySi L(Si−1)x
Si
⎤
⎥
⎦,
Z(Si)Si =
⎡
⎢
⎣
O(Si)ySi P(Si)x
Si
Q(Si)ySi L(Si)x
Si
⎤
⎥
⎦,
Z(Si+1)Si =
⎡
⎢
⎣
O(Si+1)ySi P(Si+1)x
Si
Q(Si+1)ySi L(Si+1)x
Si
⎤
⎥
⎦.
(79)
The above expression describes the relationship between theunknowns for three adjacent surfaces. In this expression,
O(Si−1)ySi , O
(Si)ySi , O
(Si+1)ySi , P(Si−1)x
Si , P(Si)xSi , P(Si+1)x
Si , Q(Si−1)ySi , Q
(Si)ySi ,
Q(Si+1)ySi , L(Si−1)x
Si , L(Si)xSi , and L(Si+1)x
Si are twelve submatrices.Their elements are
O(Si−1)ySi = τm,n
(Ri−1)ζm,n(Ri−1,Si−1)Λ
m,n,m′,n′ap(Si)
− τm′,n′
(Ri−1)ζm′,n′(Ri−1,Si−1)Λ
m,n,m′,n′p(Si) ,
P(Si−1)xSi = −ξm,m
(Ri−1)ζm,n(Ri−1,Si−1)Λ
m,n,m′,n′ap(Si)
+ ξm′,n′
(Ri−1)ζm′,n′(Ri−1,Si−1)Λ
m,n,m′,n′p(Si) ,
Q(Si−1)ySi = ξm,n
(Ri−1)ζm,n(Ri−1,Si−1)Λ
m,n,m′,n′ap(Si)
− ξm′,n′
(Ri−1)ζm′,n′(Ri−1,Si−1)Λ
m,n,m′,n′p(Si) ,
L(Si−1)xSi = −ϕm,n
(Ri−1)ζm,n(Ri−1,Si−1)Λ
m,n,m′,n′ap(Si)
+ ϕm′,n′(Ri−1)ζ
m′,n′(Ri−1,Si−1)Λ
m,n,m′,n′p(Si) ,
O(Si)ySi =
(
τm,n(Ri)ζ
m,n(Ri,Si) − τm,n
(Ri−1)ζm,n(Ri−1,Si)
)
Λm,n,m′,n′ap(Si)
−(
τm′,n′
(Ri) ζm′,n′
(Ri ,Si) − τm′,n′
(Ri−1)ζm′,n′(Ri−1,Si)
)
Λm,n,m′,n′p(Si) ,
P(Si)xSi = −
(
ξm,n(Ri)ζ
m,n(Ri ,Si) − ξm,n
(Ri−1)ζm,n(Ri−1,Si)
)
Λm,n,m′,n′ap(Si)
+(
ξm′,n′
(Ri) ζm′,n′
(Ri ,Si) − ξm′,n′
(Ri−1)ζm′,n′(Ri−1,Si)
)
Λm,n,m′,n′p(Si) ,
Q(Si)ySi =
(
ξm,n(Ri)ζ
m,n(Ri,Si) − ξm,n
(Ri−1)ζm,n(Ri−1,Si)
)
Λm,n,m′,n′ap(Si)
−(
ξm′,n′
(Ri) ζm′,n′
(Ri ,Si) − ξm′,n′
(Ri−1)ζm′,n′(Ri−1,Si)
)
Λm,n,m′,n′p(Si) ,
L(Si)xSi = −
(
ϕm,n(Ri)ζ
m,n(Ri,Si) − ϕm,n
(Ri−1)ζm,n(Ri−1,Si)
)
Λm,n,m′,n′ap(Si)
+(
ϕm′,n′(Ri) ζm
′,n′(Ri ,Si) − ϕm′,n′
(Ri−1)ζm′,n′(Ri−1,Si)
)
Λm,n,m′,n′p(Si) ,
O(Si+1)ySi = −τm,n
(Ri)ζm,n(Ri,Si+1)Λ
m,n,m′,n′ap(Si)
+ τm′,n′
(Ri) ζm′,n′
(Ri,Si+1)Λm,n,m′,n′p(Si) ,
P(Si+1)xSi = ξm,m
(Ri) ζm,n(Ri,Si+1)Λ
m,n,m′,n′ap(Si)
− ξm′,n′
(Ri) ζm′,n′
(Ri,Si+1)Λm,n,m′,n′p(Si) ,
Q(Si+1)ySi = −ξm,n
(Ri)ζm,n(Ri,Si+1)Λ
m,n,m′,n′ap(Si)
+ ξm′,n′
(Ri) ζm′,n′
(Ri,Si+1)Λm,n,m′,n′p(Si) ,
L(Si+1)xSi = ϕm,n
(Ri)ζm,n(Ri,Si+1)Λ
m,n,m′,n′ap(Si)
− ϕm′,n′(Ri) ζm
′,n′(Ri,Si+1)Λ
m,n,m′,n′p(Si) ,
(80)
where Λm,n,m′,n′p(Si) = Λ−Λm,n,m′ ,n′
ap(Si) , and ξm,n(Ri) , τm,n
(Ri) , ϕm,n(Ri) are given
by
ξm,n(Ri) =
(−kmkn)
jωμ(Ri)γ(Ri)mn
,
τm,n(Ri) =
(
(
k(Ri))2 − k2
n
)
jωμ(Ri)γ(Ri)m,n
,
ϕm,n(Ri) =
(
(
k(Ri))2 − k2
m
)
jωμ(Ri)γ(Ri)m,n
.
(81)

International Journal of Antennas and Propagation 11
2.7.2. Last Interface (Sn+1). When the derivation in the abovesubsection is repeated for the last interface Sn+1 of a Type Astructure, that is, Sn+1, the result is
0 =[
Z(Sn)Sn+1
Z(Sn+1)Sn+1
]
·[
B(Sn)
B(Sn+1)
]
. (82)
This involves only two unknown vectors because there are nomagnetic currents below this surface.
By manipulating the above equation, B(Sn+1) can be ex-pressed in terms of B(Sn):
B(Sn+1) =[
Z(Sn+1)Sn+1
]−1[−Z(Sn)Sn+1
B(Sn)]
. (83)
Let us now define
Φn+1 = −[
Z(Sn+1)Sn+1
]−1Z(Sn)Sn+1
, (84)
then (83) becomes
B(Sn+1) = Φn+1B(Sn). (85)
Note that now we have a relationship connecting unknownsfor two adjacent interfaces.
In a Type B structure, the last surface with magneticcurrents is Sn. The above derivation is valid for this case too.In this case, B(Sn+1) = 0; the relationship between B(Sn) andB(Sn−1) is similar to (85).
2.7.3. Second-Last Interface Sn. As an example, let us nowconsider the next interface, Sn. The objective here is to derivea relationship between B(Sn) and B(Sn−1), by exploiting (78)and (85). Let us first substitute i = n in (78) and rewrite it as
Z(Sn)Sn B(Sn) + Z(Sn+1)
Sn B(Sn+1) = −Z(Sn−1)Sn B(Sn−1). (86)
Now, we substitute (85) to replace B(Sn+1). The result is[
Z(Sn)Sn + Z(Sn+1)
Sn Φn+1
]
B(Sn) = −Z(Sn−1)Sn B(Sn−1). (87)
After rearrangement, we get the following relationship be-tween B(Sn) and B(Sn−1):
B(Sn) = ΦnB(Sn−1), (88)
where
Φn = −[
Z(Sn)Sn + Z(Sn+1)
Sn Φn+1
]−1 · Z(Sn−1)Sn . (89)
In a Type B structure, the second-last surface with magneticcurrents is Sn−1. The above derivation is valid for this casetoo.
2.7.4. Intermediate Interface Si. Now, we revisit a typicalintermediate surface Si. As shown above for the i = nexample, it is possible to express the unknown coefficientsB(Si) (i = 2, . . . ,n + 1) in terms of B(Si−1) by repeating thesame steps. The result is
B(Si) = ΦiB(Si−1), (90)
where
Φi = −[
Z(Si)Si + Z(Si+1)
Si Φi+1
]−1 · Z(Si−1)Si . (91)
2.7.5. Top Interface S1. This interface is different due to theexistence of the incident field in Region R0. After expanding(68) and (70), we obtain
H(S1) =[
Z(S1)S1
Z(S2)S1
]
·[
B(S1)
B(S2)
]
, (92)
where H(S1) is defined as
H(S1) =⎡
⎣
H(S1)iy
H(S1)ix
⎤
⎦,
H(S1)iy =
[
. . . ,Γm,na
[
−2Hiy
]
, . . .]′
,
H(S1)ix =
[
. . . ,Γm,na
[
−2Hix
]
, . . .]′.
(93)
Using (90), B(S2) in (92) can be replaced by B(S1). The resultis
H(S1) =[
Z(S1)S1
+ Z(S2)S1
Φ2
]
·[
B(S1)]
. (94)
Note that the only unknown here is B(S1), which can beobtained by solving this matrix equation. Once B(S1) is found,all other unknowns can be found, if necessary, step by step,following (90).
When calculating the reflection characteristics of multi-layer structures, only B(S1) is required. In fact, if all modesother than the m = 0, n = 0 are evanescent, one needs only
b(S1)00 to determine the surface reflection coefficients.
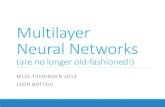
2.8. Truncating the Infinite Series. It may appear that itis a large task to solve the linear system (92) becauseits unknowns are the coefficients of 2D modes for twoorthogonal polarizations. For example, if we truncate therange of m and n as [−15, . . . , 0, . . . , 15], then we have a linearsystem with 2 × 31 × 31 ≈ 2000 unknowns. However, notall these unknowns contribute to the convergence equally.In fact, converged results can be obtained with a muchsmaller number of unknowns, as described here. For somegeometries, only tens of unknowns are sufficient. Thereare two factors to be considered when determining theminimum set of unknowns.
First, the width of the spatial spectrum of electric magne-tic fields is mainly determined by the singularities of theelectromagnetic fields around the edges, tips, and reentrantcorners of conducting patterns. These singularities can bedescribed as 1/R1−ν in general, where R is the distance to thesingular centres, such as aperture corners, edges and tips, andν is the singularity exponent (e.g., ν = 0.5 for a singularityalong the edge of an infinite thin metal patch). Its spatialspectrum is given by 2Ψ(ν)(k)−ν cos(νπ/2), where Ψ(ν) isa constant for a given ν [11]. Take the unit cell, shown inFigure 6, for example. Since its singularity is mainly along theedges of the metal patch, the singularity exponent ν is equalto 0.5 (according to [12]) and Ψ(ν) = 1.7725 according to[11]. This spectrum is effectively truncated when we truncatethe modes by limiting the range of m and n. For this type ofsingularity in a 10 mm unit cell, when the number of modesselected (i.e., maxm,n) is 7, its truncation error is less than

12 International Journal of Antennas and Propagation
100
500
−50−100
100500−50
−100
0
1
2
3
4
Mode m
Mode n
×10−5
Figure 5: |Λm,n,0,0ap | of the 2D periodic square patch shown in
Figure 6.
2.4%. There should be at least 15 modes to have an errorless than 1%. Hence, the range of m and n is limited to[−15, . . . , 0, . . . , 15] for the calculations presented here. Thiswould normally lead to 31 × 31 unknowns, or altogether2 × 31× 31 in both x- and y-directions.
However, not all the 2 × 31 × 31 unknowns contributeto convergence equally, and hence most of them can besafely dropped without compromising accuracy. Accordingto [13], the convergence of the linear system (94) mainlydepends on the right-side vector [Hyi, Hxi]′. It can be shownthat the ((m,n)th) elements of Hyi and Hxi are proportionalto Λm,n,0,0
ap , which is determined by the geometry of theconducting pattern. The |Λm,n,0,0
ap | of the periodic squarepatch, depicted in Figure 6, is shown in Figure 5. We notethat |Λm,n,0,0
ap | along diagonal directions decay much fasterthan those along the axes, that is, |Λm,0,0,0
ap | or |Λ0,n,0,0ap |. It is
significant only along the axes and around the origin. Thismakes the on-axis unknowns bm0 and b0n dominant overoff-axis unknowns. Hence, most of the off-axis bmn (i.e.,m /= 0 and n /= 0) can be ignored in the linear system withoutsignificantly affecting accuracy.
The modes that can be ignored are identified as follows.The right-hand-side vector [Hyi, Hxi]′ is generated for all2 × 31 × 31 modes first. Based on the value of the largestelement, a threshold is set and modes corresponding toelements below this threshold are ignored. The matrix in (94)is generated only after this truncation. Results obtained byapplying this truncation scheme are given in the next section.
3. Validation and Results
The reflection and transmission coefficients of several planarperiodic structures, for both TE and TM incidence, have beencalculated to validate the accuracy of this method. Theseresults are compared with HFSS results in this section. In thefollowing derivation, we assume that all modes other thanm = 0 and n = 0 are evanescent, which is the case with allstructures we have analyzed so far. When a TE incident wave
impinges on a periodic surface with incident angles (θ, φ),the reflection and transmission coefficients (RTE and TTE) forthe m = 0, n = 0 mode are obtained as
RTE =(
by00ux + bx00uy + Er
Eixux + Ei
yuy
)
at z=h
=(
by00ux + bx00uy
Eixux + Ei
yuy− 1
)
at z=h,
TTE =(
by00ux + bx00uy
Eixux + Ei
yuy
)
at z=h,
(95)
where (ux,uy ,uz) are the three coordinate components of theunit vector u, which is perpendicular to both the propagation
direction vector k and the surface normal direction z:
u = k × z. (96)
Similarly, for TM-polarized incident waves, the reflectionand transmission coefficients are
RTM = −(
Hsyuy + Hs
xux + Hr
Hixux + Hi
yuy
)
at z=h
= −(
Hsyuy + Hs
xux
Hixux + Hi
yuy+ 1
)
at z=h,
TTM = −η(2)
η(1)
(
Hsyuy + Hs
xux
Hixux + Hi
yuy
)
at z=h,
(97)
where
Hsx =
(
−kxky)
by00
− jωμ(1)γ(1)00
+
(
(
k(1))2 − (kx)2
)
bx00
jωμ(1)γ(1)00
,
Hsy =
(
(
k(1))2 −
(
ky)2)
by00
− jωμ(1)γ(1)00
+
(
−kxky)
bx00
jωμ(1)γ(1)00
,
η(1,2) =√
μ(1,2)
ε(1,2).
(98)
For convenience and without any loss of generality, we choseto calculate the reflection and transmission coefficients at x,y = 0. For the special case of normal incidence,
R =(
Erx + b
y00
Eix
)
at z=h=(
by00
Eix− 1
)
at z=h,
T =(
by00
Ei
)
at z=h.
(99)
For validation, we compare CFEM results with HFSS resultsbecause HFSS is readily available and is considered anindustry standard software. In our HFSS model, the unitcell was built with Master/Slave boundaries on the four sidesand a radiation boundary on the top (and also the bottomin the case of FSS) to truncate the computational volume.The model was excited by a TEM plane wave, instead of awave port to define incident waves, which may impinge at

International Journal of Antennas and Propagation 13
10 mm
8 mm
(a)
1.57 mm
Metal patch
PEC ground plane
εr = 3.5
(b)
Figure 6: AMC unit cell consisting of a square PEC patch on a dielectric substrate with relative permittivity 3.5. (a) Top view. (b) Side view.
oblique angles. In this case, the built-in R/T calculation inHFSS cannot be used to calculate RTE,TM and TTE,TM. Weinstead used two other methods to calculate them. (i) Far-field method: we integrate the scattered field over a surfacenormal to the incident direction in the far field and findthe average coefficient over the surface area. (ii) Near-fieldmethod: we first determine b
y00 and bx00 by integrating the
total field over the aperture area, according to
by00 =
Γ00a
[
Etotx |z=h
]
ab=∫∫
apEtotx |z=hdx dyab
,
bx00 =Γ00a
[
Etoty |z=h
]
ab=∫∫
apEtoty |z=hdx dyab
,
(100)
and then calculate RTE,TM and TTE,TM using (95)–(97). Inthe first method, an average reflection coefficient is obtaineddirectly using fields in the far-field region whereas, in thesecond method, the same is predicated using the aperturefields in the near-field region. We found that both far-fieldand near-field methods gave almost the same results.
In the following, we compare RTE,TM and TTE,TM calcu-lated using CFEM, HFSS (far-field and near-field) methods.The first example is a Type B square patch AMC surface,whose geometry is sketched in Figure 6. The reflection phaseof this square patch AMC, illuminated by a uniform planewave incident in the normal direction (θ = 180◦, φ =90◦), has been calculated. As shown in Figure 7, excellentconvergence was achieved with 593 Bloch-Floquet modesin the x-direction and the same number of Bloch-Floquetmodes in the y-direction. The overall CPU time for thecalculation of each frequency point was 40 seconds in a3.0 GHz Pentium 4 processor. The CFEM results show goodagreement with the HFSS results obtained using both near-field and far-field methods.
To assess the effect of the substrate thickness on theconvergence, we reduced the substrate thickness in Figure 6to 0.5 mm. Figure 8 shows that the method still converges
5.5 6.5 7
50
6 7.5 8 8.5 9 9.5 10
200
150
100
0
−50
−100
−150
−200
Refl
ecti
on p
has
e (d
eg)
HFSS: far field (tet = 1509)HFSS: near field (tet = 1509)CFEM: 13 × 2 modes
CFEM: 201 × 2 modesCFEM: 593 × 2 modesCFEM: 1125 × 2 modes
Frequency (GHz)
Figure 7: CFEM convergence for the square patch AMC in Figure 6.Reflection phase angle at normal incidence θ = 180◦ is shown fordifferent CFEM modes and HFSS methods. Substrate thickness is1.57 mm. “tet” represents the number of tetrahedrons.
with 593 × 2 modes. This is because we analytically describethe effect of the substrate thickness in our model.
The TE and TM reflection phase for oblique incidence(θ = 150◦, φ = 90◦) has been obtained with 593 × 2modes using CFEM. As shown in Figures 9 and 10, CFEMresults again show good agreement with HFSS results. Withthe change of the incident angle from normal to oblique, thein-phase TE reflection frequency moves up slightly. For theangle of incidence ±90◦, the AMC band for TM incidence isshifted upwards compared to TE incidence.
From Figures 7–10, we see there are slight discrepanciesbetween the HFSS near-field and far-field results. These

14 International Journal of Antennas and Propagation
7 7.5 8 8.5 9 9.5 10 10.5 11
200
150
100
50
0
−50
−100
−150
−200
Refl
ecti
on p
has
e (d
eg)
HFSS: far field (tet = 1495)HFSS: near field (tet = 1495)
11.5
CFEM: 13 × 2 modes
CFEM: 201 × 2 modesCFEM: 593 × 2 modes
Frequency (GHz)
Figure 8: CFEM convergence for the square patch AMC in Figure 6.Reflection phase angle at normal incidence (θ = 180◦) is shown fordifferent CFEM modes and HFSS methods. Substrate thickness is0.5 mm. “tet”represents the number of tetrahedrons.
−150
5.5 6 6.5 7 7.5 8 8.5 9 9.5 10
200
150
100
50
0
−50
−100
−200
Frequency (GHz)
Refl
ecti
on p
has
e (d
eg)
HFSS: far fieldHFSS: near field
CFEM
Figure 9: The reflection phase of the square patch AMC in Figure 6,for TE oblique incidence at θ = 150◦, φ = 90◦ is shown andcompared with the results obtained using HFSS (near-field and far-field methods).
discrepancies are due to the slightly different numerical accu-racy of the far-field and near-field values. These differencesare not practically significant and hence both near-field andfar-field methods are trustworthy.
The next example refers to a reflection-type circular pola-rizer, sketched in Figure 11, presented previously in [14].When a wave linearly polarized in the diagonal direction is
5.5 6 6.5 7 7.5 8 8.5 9 9.5 10
150
100
50
0
−50
−100
−150
Frequency (GHz)
Refl
ecti
on p
has
e (d
eg)
HFSS: far fieldHFSS: near field
CFEM
Figure 10: The reflection phase of the square patch AMC inFigure 6, for TM oblique incidence at θ = 150◦, φ = 90◦ is shownand compared with the results obtained using HFSS (near-field andfar-field methods).
normally incident on this surface, a circularly polarized waveis reflected. The parameters of the unit cell are a = 3 mm,b = 4 mm, w = 0.25 mm, w1 = 0.25 mm, w2 = 0.25 mm,l = 3.75 mm, l1 = 3.75 mm, l2 = 1.5 mm; the thickness ofthe substrate is t = 1.6 mm; the relative permittivity of thesubstrate is 4.4. An incident wave linearly polarized at 45◦ tothe x-axis has equal x- and y-components (Ei
x, Eiy). When
all the modes other than m = 0, n = 0 are evanescent, thereflection coefficients for Ex and Ey polarizations are
Rx =⎛
⎝
b(S1)y00
Eix− 1
⎞
⎠
∣
∣
∣
∣
∣
∣
z=z1
,
Ry =(
b(S1)x00
Eiy− 1
)∣
∣
∣
∣
∣
z=z1
.
(101)
This circular polarizer was designed such that the reflectioncoefficient magnitudes (|Rx| and |Ry|) are close to 0 dB overa wide band (9.5–14.5 GHz) and the difference between thephases of the reflection coefficients (∠Rx − ∠Ry) is close to90◦ over the same band, as shown in Figure 12. The overallCPU time for the calculation of each frequency point was 180seconds in a 3.0 GHz Pentium 4 processor and the memoryrequired was 1.4 GBytes. The results obtained using CFEMare again in good agreement with HFSS results.
4. Conclusions
In this paper, a new, field-based, seminumerical method foranalyzing single-layer and multilayer planar periodic struc-tures has been proposed. Unlike many fully numerical meth-ods, CFEM provides a physical insight as a result of the natu-

International Journal of Antennas and Propagation 15
l2
w2
w1
y
x
l1
(a)
t
ε r
(b)
w l b
a
(c)
Figure 11: Geometry of a circular polarizer. (a) Metallic pattern on the top surface. (b) Cross-section. (c) Metallic pattern on the bottomsurface.
9 10 11 12 13 14 15 16 17
−50
−100
−150
−200
−250
−300
−350
Frequency (GHz)
Refl
ecti
on p
has
e (d
eg)
HFSS:∠Rx
HFSS:∠Ry
CFEM:∠Rx
CFEM:∠Ry
90◦
Figure 12: Reflection phases of two orthogonal field componentsof the circular polarizer, calculated using CFEM and HFSS.
re of its output, that is, field distribution in terms of modes.Software based on fully numerical methods (e.g., HFSS)provides values of the field at discrete sample points only.
Numerical results obtained using the CFEM for two 2Dperiodic structures agree well with HFSS results. One maynote that, for AMC surfaces with thick (1.57 mm) and thin(0.5 mm) substrates, the method requires a similar numberof unknowns to obtain convergent results. As demonstratedin Figures 7–10, the comparison between CFEM and HFSSresults for both normal and oblique incidence is verygood. Even for the complex geometry of the two-layerplanar periodic metallic pattern (shown in Figure 12) that
includes most types of singularities, accurate results havebeen obtained.
Acknowledgment
The authors would like to take this opportunity to thankac3 and PETSC for their support with high-performance andscientific computations.
References
[1] I. Bardi, R. Remski, D. Perry, and Z. Cendes, “Plane wave scat-tering from frequency-selective surfaces by the finite-elementmethod,” IEEE Transactions on Magnetics, vol. 38, no. 2, pp.641–644, 2002.
[2] A. Taflove, Computational Electrodynamics: the Finite-Differ-ence Time-Domain Method, Artech House, Boston, Mass, USA,2000.
[3] C. C. Chen, “Scattering by a two-dimensional periodic arrayof conducting plates,” IEEE Transactions on Antennas and Pro-pagation, vol. AP-18, no. 5, pp. 660–665, 1970.
[4] J. P. Montgomery, “Scattering by an infinite periodic array ofthin conductors on a dielectric sheet,” IEEE Transactions onAntennas and Propagation, vol. AP-23, no. 1, pp. 70–75, 1975.
[5] M. Bozzi and L. Perregrini, “Analysis of Multilayered PrintedFrequency Selective Surfaces by the MoM/BI-RME Method,”IEEE Transactions on Antennas and Propagation, vol. 51, no.10, pp. 2830–2836, 2003.
[6] A. G. Schuchinsky, D. E. Zelenchuk, A. M. Lerer, and R. Dickie,“Full-wave analysis of layered aperture arrays,” IEEE Transac-tions on Antennas and Propagation, vol. AP-54, no. 2, pp. 490–501, 2006.
[7] A. M. Lerer and A. G. Schuchinsky, “Full-wave analysis ofthree-dimensional planar structures,” IEEE Transactions onMicrowave Theory and Techniques, vol. MTT-41, no. 11, pp.2002–2015, 1993.

16 International Journal of Antennas and Propagation
[8] C. Wan and J. A. Encinar, “Efficient computation of gener-alized scattering matrix for analyzing multilayered periodicstructures,” IEEE Transactions on Antennas and Propagation,vol. AP-43, no. 11, pp. 1233–1242, 1995.
[9] S. G. Johnson and J. D. Joannopoulos, Photonic Crystals: theRoad From Theory to Practice, Kluwer Academic Publishers,London, UK, 2002.
[10] Y. Li and K. P. Esselle, “Analysis of 2D via-less artificial mag-netic conductors using a cavity model,” in Proceedings of theInternational Symposium on Antennas and Propagation, p. 200,Singapore, 2006.
[11] L. Rade and B. Westergren, Mathematics Handbook: for Scienceand Engineering, Studentlitteratur, Lund, Sweden, 1998.
[12] R. De Smedt and J. G. Van Bladel, “Field singularities near ap-erture corners,” IEE Proceedings A, vol. 134, no. 8, pp. 694–698,1987.
[13] L. M. Delves and K. O. Mead, “On the convergence ratesof variational methods. I. asymptotically diagonal systems,”Mathematics of Computation, vol. 25, no. 116, pp. 699–716,1971.
[14] Y. Li and K. P. Esselle, “Analysis and design of 2D planar,metallic, periodic structures using the coupled field expansionmethod,” in Proceedings of the 2nd European Conference onAntennas and Propagation, Edinburgh, UK, November 2007.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2010
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of