
A BRKGA for the project scheduling problem with exible...
36
A BRKGA for the project scheduling problem with flexible resources Bernardo F. Almeida a* , Isabel Correia b , Francisco Saldanha-da-Gama a a Departamento de Estat´ ıstica e Investiga¸ c˜ao Operacional / Centro de Matem´atica e Aplica¸ c˜oes Fundamentais — Centro de Investiga¸ c˜ao Operacional, Faculdade de Ciˆ encias, Universidade Lisboa, 1749-016 Lisboa, Portugal b Departamento de Matem´atica / Centro de Matem´atica e Aplica¸ c˜oes, Faculdade de Ciˆ encias e Tecnologia, Universidade Nova Lisboa, 2829-516 Caparica, Portugal Abstract In this paper we address a project scheduling problem with flexible resources. This NP -Hard combinatorial optimization problem is associated with scheduling a set of activities which require specific resource units for each one of the several skills needed for their execution, such that the makespan of the project is minimized. We propose a biased random-key genetic algorithm (BRKGA) for computing feasible solutions for the referred problem. We study different decoding mechanisms: heuristic of Almeida et al. (2016), a new adapted serial scheduling generation scheme and both. The BRKGA is tested on a total of 432 instances of different dimensions and the results indicate that the developed algorithm is robust and attains high quality solutions. Keywords: Project scheduling, Flexible resources, Biased random-key genetic algo- rithm. * Corresponding author. e-mail address : [email protected] 1
Transcript of A BRKGA for the project scheduling problem with exible...

A BRKGA for the project scheduling problem withflexible resources
Bernardo F. Almeidaa∗, Isabel Correiab, Francisco Saldanha-da-Gamaa
a Departamento de Estatıstica e Investigacao Operacional / Centro de Matematica e AplicacoesFundamentais — Centro de Investigacao Operacional, Faculdade de Ciencias, Universidade Lisboa,
1749-016 Lisboa, Portugalb Departamento de Matematica / Centro de Matematica e Aplicacoes, Faculdade de Ciencias e
Tecnologia, Universidade Nova Lisboa, 2829-516 Caparica, Portugal
Abstract
In this paper we address a project scheduling problem with flexible resources. ThisNP-Hard combinatorial optimization problem is associated with scheduling a set ofactivities which require specific resource units for each one of the several skills neededfor their execution, such that the makespan of the project is minimized. We proposea biased random-key genetic algorithm (BRKGA) for computing feasible solutions forthe referred problem. We study different decoding mechanisms: heuristic of Almeidaet al. (2016), a new adapted serial scheduling generation scheme and both. TheBRKGA is tested on a total of 432 instances of different dimensions and the resultsindicate that the developed algorithm is robust and attains high quality solutions.
Keywords: Project scheduling, Flexible resources, Biased random-key genetic algo-rithm.
∗Corresponding author. e-mail address: [email protected]
1

1 Introduction
In the classical resource-constrained project scheduling problem (RCPSP) a set of time
dependent activities which require specific resources that are available in limited quantities,
has to be scheduled such that the makespan of the project is minimized. This problem has
been widely studied in the literature along with many variants of it due to their associated
large number of real-world applications (for overviews the reader should refer to the work
of Herroelen and Demeulemeester (1998), Brucker et al. (1999), Hartmann and Briskorn
(2010), Weglarz et al. (2011), and the references therein).
In many resource constrained project scheduling problems, resources are flexible mean-
ing that each resource often performs more than one skill. This situation usually arises
when human resources or multi-purpose machines are involved in the project. Typically
in this context, activities require specific resource units of several skills to be processed.
The assignment of a resource to an activity comprehends the decision of the skill it will
perform, from the set of skills required by that activity and mastered by this resource.
The problem we have just described falls into the class of project scheduling problems
with flexible resources (PSPFR) which consists of an extension of the RCPSP.
Some types of PSPFR have already been proposed in the literature. Li and Womer
(2009) study a project scheduling problem with flexible resources where each activity re-
quires only one resource unit per each skill needed for its execution. The objective function
of this problem regards the minimization of the fixed costs associated with the resources.
In a paper by Correia et al. (2012) a makespan minimization project scheduling problem
with flexible resources is studied. A variant of this problem which includes fixed and vari-
able costs for the resources was considered in Correia and Saldanha-da-Gama (2014). More
recently, Correia and Saldanha-da-Gama (2015) proposed a general modeling framework
for project staffing and scheduling problems. In multi-project problems, flexible resources
have also been considered but with additional assumptions. For example, the works of
Gutjahr et al. (2008), and Heimerl and Kolisch (2010) consider that no sequence decisions
have to be made.
The problem addressed in this paper is the project scheduling problem with flexible
resources studied by Correia et al. (2012). The authors proposed a mixed-integer linear
programming formulation together with a set of additional inequalities which was developed
with the objective of strengthen the model. The computational experience showed that,
2

as expected, due to the NP-Hard nature of the problem, this framework turned to be
effective only for small sized instances. As the development of good heuristics is necessary
to compute feasible solutions for larger sized instances, Almeida et al. (2016) proposed a
parallel scheduling generation scheme for this problem. With the objective of improving
the upper bounds provided by this constructive heuristic, we propose in this paper a biased
random-key genetic algorithm (BRKGA) for the project scheduling problem with flexible
resources. A BRKGA is a population based metaheuristic, proposed by Goncalves and
Resende (2011), where each individual is represented by an array of real numbers between
0 and 1. This method has many similarities with the classical genetic algorithms but it
uses some different strategies which aim at overcoming some of the drawbacks associated
with the genetic algorithms.
To the best of the authors’ knowledge, a BRKGA has never been proposed for a
project scheduling problem with flexible resources although it has been applied to resource-
constrained project scheduling problems (Goncalves et al. 2008, Mendes et al. 2009, Goncalves
et al. 2011). BRKGA algorithms have also been successfully applied to other optimization
problems such as packing (Goncalves and Resende 2013), facility layout (Goncalves and
Resende 2015), capacitated minimum spanning trees (Ruiz et al. 2015), among others.
This paper is organized as follows. In Section 2 the PSPFR being tackled is described,
the parallel scheduling scheme studied by Almeida et al. (2016) is revisited and a serial
scheduling generation scheme is proposed. In Section 3 we review all the issues related
with the design of a generic BRKGA. Section 4 presents the BRKGA we propose for the
PSPFR. Section 5 reports the computational experience on different instance sets. Finally
our concluding remarks and directions for future work appear in Section 6.
2 PSPFR
The problem addressed in this paper is the project scheduling problem with flexible
resources (PSPFR) studied by Correia et al. (2012). In this section we define the problem
and discuss several issues related to the computation of feasible solutions.
2.1 Problem definition
The PSPFR considers a project defined by an activity-on-node network G = (V,E)
where V = {0, 1, . . . , i, j, . . . , n + 1} denotes the set of activities and the set of arcs E
3

represents the precedence relations between such activities. Activities 0 and n + 1 are
dummy activities that represent, respectively and begin and the end of the project. An
arc (i, j) belongs to E if activity i is a direct predecessor of activity j which implies that
the latter can only start after activity i has finished. The weight of each arc (i, j) is pi, the
processing time of activity i. No preemption is allowed meaning that once an activity starts
to be executed it can not be interrupted. This problem also requires a set of renewable
resources R = {1, . . . , k, . . . , K} and a set of skills L = {1, . . . , l, . . . , L}. Each resource k
has a set of skills or abilities it can perform Lk, and each activity j is associated with a
set of skills Lj which are required for performing this activity. The number of resources
required by activity j for processing skill l ∈ Lj during all its execution time is denoted
by rjl. A resource k can only be involved in one activity at a time and once it is assigned
to an activity j for performing a skill l ∈ Lj
⋂Lk, it remains assigned to that activity
performing that same skill during its whole processing time.
The objective of the PSPFR is to determine for each activity, its starting time and the
set of resources which should be assigned to each skill required for its execution, so that
the makespan is minimized, i.e, the project finishes as soon as possible.
In this problem it is also assumed that the parameters pj (j ∈ V \ {0, n + 1}) and rjl
(j ∈ V \ {0, n+ 1}; l ∈ Lj) are positive integers and are zero for the dummy activities.
From the previous data it is obvious to conclude that the makespan must be a positive
value less or equal than∑
j∈V pj (this value is associated with the schedule where the
activities are processed sequentially).
2.2 Constructive Heuristics
Being the PSPFR a NP-Hard combinatorial optimization problem, the computation
of optimal solutions can be very time consuming (Correia et al. 2012) even for small sized
instances. This fact justifies the need to develop efficient heuristic methods to compute fea-
sible solutions for larger sized instances. Since the PSPFR is an extension of the RCPSP,
two natural constructive heuristics for the PSPFR can be derived by adapting the well
known Parallel Scheduling Scheme (PSS) and Serial Scheduling Scheme (SSS) proposed in
the literature for the RCPSP (Kolisch 1996). Although the SSS and the PSS are straight-
forward heuristics for the RCPSP, their generalization to the PSPFR entails an increased
complexity, mainly related to the selection and assignment of flexible resources to the
activities in the project.
4

The PSS was adapted to the PSPFR by Almeida et al. (2016) and it is revisited in
this section where an adaptation of the SSS to the PSPFR is also proposed. We are going
to present these methods because both can be used within the biased random-key genetic
algorithm that we propose in Section 4.
Next, we briefly describe the general structure of the PSS and SSS heuristics.
The PSS is an iterative method that requires at most, a number of iterations equal
to the number of activities to be scheduled. In iteration 1, a time counter t is initialized
to zero. In the remaining iterations, t will move forward by assuming values that depend
on the finish times of already scheduled activities. In each iteration, which is associated
with a specific t value, a set of activities Wt is built. This set contains initially all the
activities whose predecessors have already finished at that time. If Wt is empty, the value
of t is incremented and a new iteration starts. Otherwise either there are enough resources
among the available ones to meet all the skill requirements of the activities in Wt, and
hence all these activities start being processed at time t, or the available resources are not
sufficient to fulfill the skill requirements of the activities in Wt, and thus the activity with
the worst priority value j′ ∈ Wt is successively removed from Wt until Wt is either empty
or all the skill requirements of its activities can be met. A priority value is assigned to
each activity so that an activity ranking can be built. In Almeida et al. (2016) the priority
values for the activities were obtained by using several of the priority rules that are well
known from the literature on the RCPSP (Kolisch 1996, Demeulemeester and Herroelen
2002). In this work we followed a different strategy for computing such values which is to
be presented in Section 4.
The SSS is also an iterative method that starts by initializing the time t to zero. In each
iteration the activity j∗ with the best priority value and whose predecessors are already
scheduled, is selected to be scheduled. The time counter t is then set to the maximum
finish time of all the predecessors of j∗. Activity j∗ is scheduled to start at time t only
if the resources available from time t to time t + pj∗ − 1 are enough to fulfill all its skill
requirements; otherwise t is moved forward to the next time instant where an already
scheduled activity finishes. This process repeats until activity j∗ is scheduled. In the SSS,
we consider that in each iteration t, the Wt set consists of only one activity.
Any set of activities Wt can start to be processed at time t if and only if the predecessors
of all the activities in Wt have finished and Wt is a set of compatible activities meaning that
the following two conditions need to be satisfied: (i) no precedence relations exist between
5

any two activities in Wt; (ii) the available resources can meet the skill requirements of the
activities in Wt.
Checking if a set of activities Wt is compatible can be done in polynomial time by
finding a feasible flow in an auxiliary network GWt = (VWt , EWt) such that:
• The set of nodes VWt contains:
- a source node v0 and a sink node vs;
- a set of nodes ZWt associated with the resources which are available at time t (and
that remain unallocated in all time slots where Wt will be in progress, when the
proposed SSS is considered) and master at least one skill required to process the
activities in Wt;
- a set of nodes LWt associated with the skills required to process the set of activities
Wt.
• The set of arcs EWt contains:
- a set of arcs (v0, k), k ∈ ZWt with minimum throughput 0, capacity 1 and cost 0;
- a set of arcs (k, l), l ∈ (Lk ∩LWt) with minimum throughput 0, capacity 1 and cost
0;
- a set of arcs (l, vs), l ∈ LWt with minimum throughput and capacity rWtl and cost
0, where rWtl denotes the number of resource units required to process skill l for all
activities in Wt.
If a feasible flow exists in this auxiliary network then there are enough resources to
execute simultaneously all the activities in Wt.
In the next subsections we present some issues associated with the resource selection
and allocation as well as the detailed descriptions of both the PSS and SSS for the PSPFR.
2.2.1 Resource Weights
Any feasible flow in the network GWt refers to an assignment of the resources in ZWt to
the skills required by the activities in Wt. This flow may not be unique because a different
subset of the available resources may also meet the requirements of all activities in Wt. In
fact, due to the flexible nature of the resources, it may be even possible to consider the
same set of resources and obtain multiple feasible flows depending on the skills they are
assigned to perform.
6

Each resource k is associated with a specific set of skills Lk which characterizes it as
being more versatile than others, mastering scarce or highly required skills, etc. Hence, it
may not be indifferent to assign a resource to a specific skill instead of another one.
In Almeida et al. (2016) this fact motivated the development of a new measure, the
weight, associated with each resource. The weight of a resource k, denoted by wk (k ∈ R),
represents the penalization associated with selecting resource k to execute a skill mastered
by it and required by at least one activity j ∈ Wt. In the aforementioned paper, three
different rules for computing the weights were proposed.
In the context of a BRKGA, it seems to make more sense to take advantage of its
evolutive framework for computing the weights of the resources instead of using predefined
rules. We detail the methodology for attributing weights to the resources in Section 4,
which is devoted to the development of a BRKGA to the PSPFR.
2.2.2 Resource Assignment
In Almeida et al. (2016), the resources were assigned to the skills required by Wt
by solving a Minimum Cost Network Flow Problem in a network GWt = (VWt , EWt) —
MCNFP (GWt). The network GWt is obtained from the network GWt = (VWt , EWt) after
replacing the weight of each arc (v0, k) k ∈ ZWt by wk, and obviously, a feasible flow
in GWt indicates that Wt is a set of compatible activities. Since the optimal solution
of the MCNFP (GWt) only gives an assignment of the resources k ∈ ZWt to the skills
l ∈ (Lk ∩ LWt) without indicating to which activity a resource is allocated, Almeida et al.
(2016) proposed a procedure (which we detail in Algorithm 2 of the next section) where,
as much as possible, the resources with larger weights are assigned to the activities with
smaller processing times, in an attempt of releasing these resources sooner, thus making
them available to be assigned to other activities.
2.2.3 Parallel Scheduling Scheme - PSS
To maintain this paper self-contained, we present next the pseudo-codes of the PSS
proposed by Almeida et al. (2016) where a slight modification was made in order to obtain
an algorithm that could be used within the biased random-key genetic algorithm described
in Section 4. Below we present some notation used by the algorithms presented in this
section and also in Section 2.2.4.
7

Wt set of activities whose predecessors have finished at time t.
LWt =⋃
j∈WtLj set of skills required to process Wt.
XWtl ⊆ ZWt set of resources in the optimal solution of MCNFP (GWt)
that meet the skill requirements l ∈ LWt .
UV set of unscheduled activities.
Succ(j) set of immediate successors of activity j.
Pred(j) set of immediate predecessors of activity j.
rWtl =∑
j∈Wtrjl number of resource units required to fulfill the requirements
of each skill l ∈ LWt .
Sj starting time of activity j.
wk weight of resource k.
pvj priority value of activity j.The set of activities not yet scheduled, UV , contains initially all the activities. We recall
that the procedure to assign weights to the resources and priority values to the activities
is presented in Section 4.
8

Algorithm 1: Parallel Scheduling Scheme (PSS) (Almeida et al. 2016)
Data: V,E, Pred(j), Succ(j),R,L,Lj ,Lk, pj , rjl, pvj , wk : j ∈ V, k ∈ R, l ∈ Lj
Result: makespan
1 begin
2 UV ←− V \ {0, n+ 1};3 t←− 0;
4 S0 ←− 0;
5 while UV 6= ∅ do6 Wt ←− ∅;7 for j ∈ UV do
8 if t ≥ max{Si + pi : i ∈ Pred(j)} then9 Wt ←−Wt ∪ {j}
10 end
11 end
12 while Wt 6= ∅ do13 if all activities j ∈Wt are compatible then
14 Solve the MCNFP (GWt);
15 for l ∈ LWtdo
16 get XWtl;
17 end
18 Execute Algorithm 2
19 end
20 else
21 Find j′ ∈Wt : pvj′ is the smallest activity priority value;
22 Wt ←−Wt \ {j′}23 end
24 end
25 t←− min{Sj + pj : j ∈ V ∧ j /∈ UV };26 end
27 makespan←− max{Sj + pj : j ∈ V }28 end
Algorithm 1 contains the pseudo-code for the PSS. The method starts by initializing
some parameters (lines 2-4). Then, the main step (lines 5-26) is executed as long as
there are unscheduled activities. This step starts by inserting in Wt the activities whose
predecessors have already finished (lines 7-11). Afterwards, it checks the compatibility of
the activities in Wt. If Wt is a set of compatible activities then Algorithm 2 is employed to
assign resources to these activities (lines 13-19). If Wt is not a set of compatible activities
then the activity j′ ∈ Wt associated with the smallest priority value is removed from Wt
(lines 21-22) and this step repeats until either the remaining activities in Wt are compatible
or Wt is empty. In the latter case, the time is incremented and the main step of the
Algorithm 1 repeats. Obviously, before solving the MCNFP (GWt) it is necessary to build
9

the sets ZWt and LWt which are both updated if any activity is removed from Wt in order
to reduce this set to a set of compatible activities.
Algorithm 2: Resource Assignment (Almeida et al. 2016)Data: UV,Wt,XWtl,Lj , pj , rjl, wk j ∈Wt, l ∈ Lj , k ∈ XWtl
Result: Resources are assigned to the compatible activities in Wt
1 begin
2 while Wt 6= ∅ do3 Find j∗ : pj∗ = min {pj : j ∈Wt};4 Sj∗ ←− t;5 for l ∈ Lj∗ do
6 nra←− 0 // number of resources assigned to perform skill l for activity j∗;
7 while nra < rj∗l do
8 Find k∗ : wk∗ = max {wk : k ∈ XWtl};9 Assign resource k∗ to perform skill l for activity j∗ and set it busy within
{Sj∗ , . . . , Sj∗ + pj∗ − 1};10 nra = nra+ 1;
11 XWtl ←− XWtl \ {k∗};12 end
13 end
14 Wt ←−Wt \ {j∗};15 UV ←− UV \ {j∗};16 end
17 end
Algorithm 2 determines the assignment of resources k ∈ XWtl to the activities in Wt
according to the skills they were assigned to perform in the solution of the corresponding
MCNFP (GWt). In each step of the algorithm, the activity j∗ in Wt associated with the
smallest execution time pj∗ is chosen and its starting time, Sj∗ , is set to t (lines 3-4). Next,
the requirements of each skill l ∈ Lj∗ are fulfilled through the assignment of the resources
with larger weights among the ones that belong to XWtl and which have not been allocated
yet (lines 5-13). After meeting all the skill requirements of j∗, this activity is removed from
Wt and UV . The algorithm repeats until Wt is empty.
2.2.4 Serial Scheduling Scheme - SSS
As we have pointed out is Section 2.2, in a SSS one activity is scheduled at a time or
equivalently, the set of activities to be scheduled Wt, consists of only one activity at a time.
This originates several simplifications namely with regard to the resource assignment: after
solving the corresponding minimum cost network flow problem it is obvious that all the
resources in the solution to that problem are assigned to the unique activity in Wt.
10

Algorithm 3: A Serial Scheduling Scheme (SSS) for the PSPFR
Data: V,E, Pred(j), Succ(j),R,L,Lj ,Lk, pj , rjl, pvj , wk : j ∈ V, k ∈ R, l ∈ Lj
Result: makespan
1 begin
2 UV ←− V \ {0, n+ 1};3 t←− 0;
4 S0 ←− 0;
5 while UV 6= ∅ do6 Find j∗ : pvj∗ = max{pvj : j ∈ UV ∧ Pred(j) ∩ UV = ∅} ;
7 if Pred(j∗) = ∅ then
8 t←− 0;
9 end
10 else
11 t←− max{Si + pi : i ∈ Pred(j∗)};12 end
13 Compute Rj∗ = {k ∈ R : Lk ∩ Lj∗ 6= ∅} // resources with skills required by activity j∗;
14 Wt ←− {j∗};15 while j∗ unscheduled do
16 ZWt ←− ∅;17 for k ∈ Rj∗ do
18 if k is available in every time instant {t, ..., t+ pj∗ − 1} then19 ZWt ←− ZWt ∪ {k};20 end
21 end
22 Solve the MCNFP (GWt);
23 if MCNFP (GWt) has a feasible solution then
24 Sj∗ ←− t;25 For each skill l ∈ Lj∗ , assign the resources k ∈ XWtl and set them busy within
t ∈ {Sj∗ , . . . , Sj∗ + pj∗ − 1};26 UV ←− UV \ {j∗} ;
27 end
28 else
29 t←− min{Su + pu : u /∈ UV ∧ Su + pu > t} // increment t;
30 end
31 end
32 end
33 makespan←− max{Sj + pj : j ∈ V } ;
34 end
In Algorithm 3 the pseudo-code of the SSS we propose is presented. The method starts
with the initialization of some parameters (lines 2-4). The main step of the heuristic is
executed while there are unscheduled activities (lines 5-32). This step starts by choosing the
activity j∗ with the best priority value among the ones that either have no predecessors
or have all their predecessors already scheduled (line 6). The time t is then set to the
11

earliest precedence feasible start time of activity j∗ (lines 7-12). Next several operations
are performed in order to include in ZWt all the resources available in all time instants
{t, . . . , t + pj∗ − 1} and which master at least one skill required by j∗ (lines 16-21). Only
these resources are candidate to perform a given skill during the whole processing time of
j∗. After solving the MCNFP (GWt) two situations may arise: an optimal solution is found
or no feasible flow exists. In the former case, the unique activity j∗ in Wt is scheduled to
start at time t (line 24) and the set XWtl, (l ∈ Lj∗) indicates which resources are assigned
to skill l ∈ Lj∗ (line 25). In the latter situation t is incremented to the minimum finish
time of all activities already scheduled whose conclusion occurs after t (line 29).
In contrast to the PSS, which is a time incrementing algorithm where the time counter
t always moves forward, in the SSS we have just described, it is possible to have already
scheduled activities which start after t. In fact, when an activity, say j∗, is going to be
scheduled, the time t is initialized to the maximum completion time of all predecessors
of j∗. Therefore, it is possible to have other already scheduled activities which have the
necessary resources allocated and their starting times higher than t. Hence for a given time
t, deciding whether activity j∗ can start being processed at that time, requires checking
if the resources available in every time slot where j∗ will be in progress, from t to its
provisional finish time: t+ pj∗ − 1, can fulfill all its skill requirements.
2.2.5 Precedence Network Schemes
The PSS and SSS just presented can also be applied to the problem obtained by re-
versing all the arcs in the precedence network. This problem is equivalent to execute the
project from the end to the beginning by considering the last activities to be the first ones
to be scheduled. Obviously the problem to be solved is the same but the order by which
each activity is scheduled may be different, and hence a different resource selection and
assignment may occur, which results in a schedule with, possibly, a different makespan.
This concept of backward planning has already been applied to the RCPSP by Li and
Willis (1992), Ozdamar (1999) and Klein (2000).
3 Biased Random-Key Genetic Algorithms
A Genetic Algorithm (GA) (Holland 1975, and Goldberg 1989) is a metaheuristic that
uses concepts of evolution and hereditary to solve optimization problems. In a GA a
12

population of individuals evolves over a number of iterations, called generations, until the
defined stopping criteria are met. Each individual, which is represented by a chromosome,
encodes a solution to the problem to be solved. A chromosome is represented by a vector
of m genes (m being problem dependent) whose values are referred to as alleles. By using a
deterministic algorithm called decoder (which is problem dependent) each chromosome is
converted into a solution to the optimization problem and its fitness value can be computed.
The quality of the solution a chromosome encodes is given by its fitness value. In each
iteration, or generation, the chromosomes that represent the current population produce
descendants by means of crossover and mutation operators.
In spite of the large success of this kind of algorithms, to determine the best chromosome
codification for a particular problem can be a very difficult task. Moreover, the crossover
operations between two chromosomes may lead to infeasible solutions and consequently
to an increase in the computational time necessary to recover feasibility. With the goal
of overcoming this kind of drawbacks, Bean (1994) introduced the random-key genetic
algorithms (RKGA) for solving sequencing problems. In a RKGA, independently from
the optimization problem to be solved, each chromosome is represented by a vector of m
random-keys, i.e., each allele is a random real number between 0 and 1.
Apart from the differences just presented, the RKGA differs from the classical GA in
the way the population evolves namely: i) it follows an elitist strategy where the chromo-
somes associated with the best fitness values in one iteration (elite population) are copied
unchanged to the next iteration; ii) it introduces the concept of immigration, associated
with the inclusion, in each iteration, of a percentage of new randomly generated chromo-
somes called mutants, instead of applying the classical mutation operator; iii) in order to
generate a new chromosome, two parents are randomly selected from the whole population,
and are then combined using parameterized uniform crossover (Spears and Jong 1991).
The Biased Random-Key Genetic Algorithm (BRKGA) (Goncalves and Resende 2011)
differs from the RKGA in the way the parents are selected for generating new individuals
and how the parameterized crossover is applied. In a BRKGA, one parent is selected from
the set of elite solutions while the other is selected from the set of non-elite solutions. In
order to explain how a new chromosome is obtained in a BRKGA, let ρe (ρe > 0.5) be the
probability of a descendant inhering an allele from its elite parent. Let us consider p1 and
p2, m−dimensional vectors that represent, respectively, an elite and a non-elite parent. Let
p3 be also a m−dimensional vector representing the offspring solution. After generating
13

m random numbers ui (i = 1, . . . ,m) in the interval [0, 1), each allele p3[i] takes the value
p1[i] if ui < ρe and takes the value p2[i] if ui ≥ ρe.
Algorithm 4 depicts a generic BRKGA. In this algorithm p denotes the number of
chromosomes in the population; m is the number of genes in each chromosome; pe is the
percentage of elite chromosomes in the population; pm denotes the percentage of mutants
introduced in each generation; ρe represents the probability of a descendant inheriting
an allele from its elite parent; U [0, 1) represents a number uniformly generated in the
interval [0, 1); g is a counter for the number of generations; and finally c∗ and f ∗ denote,
respectively, the best chromosome and its corresponding fitness value. Some examples of
stopping criteria are: a preestablished maximum number of generations, a predefined time
limit, a predetermined number of generations after the generation where the current best
fitness value was found, etc.
14

Algorithm 4: Generic BRKGAData: p, pe, pm, m, ρeResult: c∗, f∗
1 begin
2 Generate initial population P1 with p chromosomes where each allele is U [0, 1);
3 Compute the fitness of the p chromosomes using the decoder;
4 Initialize f∗ and c∗;
5 g ←− 1;
6 while the stoping criteria are not satisfied do
7 Save in the set P eg the dpe × pe most fit chromosomes of Pg ;
8 Copy P eg into Pg+1;
9 Generate dpm × pe mutants, compute their fitness, using the decoder, and copy them to
Pg+1;
10 for i = 1 to (p− dpe × pe − dpm × pe) do
11 Randomly select parent p1 from P eg ;
12 Randomly select parent p2 from Pg \ P eg ;
13 for j = 1 to m do
14 u = U [0, 1);
15 if u ≤ ρe then
16 p3[j]←− p1[j];
17 end
18 else
19 p3[j]←− p2[j];
20 end
21 end
22 Compute the fitness of p3, using the decoder, and copy p3 to Pg+1;
23 end
24 g ←− g + 1;
25 if a better chromosome was found then
26 Update f∗ and c∗;
27 end
28 end
29 end
The size of elite and mutant populations in Algorithm 4 is considered to be the smallest
integer which is greater or equal to their corresponding proportions of the whole population.
The maximum values taken by each of these proportions together with all the values taken
by the other considered parameters, to be presented in Section 5.2, assure that in a given
generation, the number of elite and mutant chromosomes is always smaller than the size
of the whole population.
15

4 A BRKGA for the PSPFR
In order to apply Algorithm 4 to the PSPFR it is only necessary to define the compo-
nents of the algorithm that are problem dependent namely the structure of the chromo-
somes and the decoder.
The structure of the chromosomes we propose is inspired on the chromosomes used
by Goncalves et al. (2008), Mendes et al. (2009) and Goncalves et al. (2011) for resource
constrained project scheduling problems, which require only activity-related information.
We define a chromosome as having m = n + K + 2 genes, where n is the number of
non-dummy activities in the precedence network, K is the number of resources involved in
the project and the last 2 positions are associated with the decoding mechanism to be used
when a chromosome is transformed into a feasible solution for the PSPFR. More precisely,
one of these genes indicate the scheduling generation scheme to be employed while the
other refers to the precedence network scheme to be considered.
A chromosome structure with a gene that indicates whether a Parallel or a Serial
Scheduling Scheme is used has already been considered for the RCPSP by Hartmann
(2002). However, to the best knowledge of the authors, the inclusion of both an additional
gene for encoding the precedence network scheme and of genes associated with the resources
has never been attempted before.
We recall that in Section 2.2 a Parallel and a Serial Scheduling Scheme were proposed
for computing feasible solutions for the PSPFR. Both heuristics can be applied to the
original network or to the reversed network as discussed in Section 2.2.5. Before running
any of these heuristics it is necessary to assign a priority value to each activity as well as
a weight value to each resource.
Next we explain how a chromosome is encoded and how it is transformed into a feasible
solution for the PSPFR. We start by presenting in Figure 1 a generic chromosome c where
each allele ui (i = 1, . . . ,m) is a real random number generated in the interval [0, 1).
16

u1 u2 . . . un un+1 un+2 . . . un+K un+K+1 un+K+2
activities : n genes resources : K genes decoder : 2 genes
chromosome length : m genes
Figure 1: A generic chromosome for the developed BRKGA.
The value of each one of the first n genes represents the priority value of the corre-
sponding activity, that is: pvi = c[i], i = 1, . . . , n. The next K genes correspond to the
weights of the resource, i.e., wk = c[n+ k], k = 1, . . . , K.
The meaning of the last 2 genes, the ones associated with the decoder, is explained in
Table 1.
gene i parameter 0 ≤ ui < 0.5 0.5 ≤ ui < 1
n+K + 1 scheduling scheme SSS PSS
n+K + 2 precedence network original reverse
Table 1: Decoder parameters.
Figure 2 shows an example of a chromosome within the developed BRKGA. We con-
sider, for the first n + K genes of the developed chromosome, that the larger the values
taken by the alleles, the higher the priority or weight, whether the corresponding gene is
associated with an activity or resource, respectively. From the first n genes we can ob-
serve, for example, that the priority value of activity 1 is higher than the priority value of
activity 2. With regard to the resources, we observe that if resources 1 and 2 are involved
in a solution to a MCNFP (GWt) and are assigned to the same skill l ∈ LWt , resource 1
is firstly attempted to be assigned to the activities j ∈ Wt with shorter processing times.
The alleles n + K + 1 and n + K + 2, indicate, respectively, that the Parallel Scheduling
Scheme should be considered and applied to the reverse precedence network.
17

0.412 0.125 . . . 0.851 0.743 0.257 . . . 0.021 0.741 0.584
activities : n genes resources : K genes decoder : 2 genes
chromosome length : m genes
Figure 2: Example of a chromosome.
With this chromosome structure the same sequence of activities’ priority values (ob-
tained from the first n genes) and weight values (next K genes) may originate four differ-
ent feasible solutions for the PSPFR because there are two possible network precedence
schemes (original or the reverse), and two decoders (PSS or the SSS). This kind of struc-
ture can enhance the search of the solution space by exploiting different regions of it.
Another positive feature of this representation is its versatility. In fact, if the values
of the last two genes are fixed for all the chromosomes generated in the BRKGA, this
means that all the chromosomes will be decoded with the same algorithm. For example, if
n + K + 1 = n + K + 2 = 0.1 for all chromosomes then the decoder consists in using the
SSS applied to the original precedence network.
5 Computational experience
In this Section we report the numerical experiments performed to evaluate the perfor-
mance of the proposed BRKGA. The BRKGA and the decoding mechanisms (PSS and
SSS) were coded in C++ programming language. For solving the Minimum Cost Network
Flow Problems, the IBM ILOG CPLEX 12.6 integrated with C++ through Concert was
used. All computational experiments were performed on a machine running an Intel Core
i7 4770K with 32GB of RAM.
This Section is organized as follows: Section 5.1 presents the test instances used to
perform the experiments. In Section 5.2 we discuss the methodology for selecting the
parameters of the developed BRKGA. Finally, in Section 5.3 the results are presented and
discussed.
18

5.1 Characteristics of the test instances
Two different sets of test instances, denoted by Set 1 and Set 2, were considered for
testing the developed BRKGA.
Set 1 contains the 216 instances generated by Correia et al. (2012) (the reader should
refer to this work for all the details regarding the instances considered) whereas Set 2
refers to 216 larger instances built using the generator developed in Almeida et al. (2015)
and already used by Almeida et al. (2016) to test the Parallel Scheduling Scheme therein
proposed. From the work by Correia et al. (2012) we know the optimal value for 203
instances of Set 1 and a lower bound for the remaining 13 instances in this set. For
comparison purposes, we consider the results achieved by Almeida et al. (2016) in terms of
gap values for each instance in Set 1 and regarding gap and makespan values for instances
in Set 2.
In the classical RCPSP the three parameters that are usually considered to measure the
hardness of a given instance are the network complexity (NC), the resource strength (RS),
and the resource factor (RF ). Correia et al. (2012) adapted these concepts to the PSPFR
and generated instances considering different values for the network complexity (NC), the
skill factor (SF ), and the modified resource strength (MRS). The NC corresponds to
the average number of successors of all activities in the precedence network. The SF
reflects the proportion of skills required by each activity with regard to the total number
of existing skills. The MRS is computed as the ratio between the total number of resource
units available and the total number of resource units needed to perform all the activities.
Hence, once fixed the total number of activities, a value for SF , and a value for MRS, it
is possible to compute the number of resources involved in the project. We present below
the characteristics of the instances in both Set 1 and Set 2.
Set 1 :• 20 activities with processing times randomly generated in the set {1, . . . , 10};• 4 skills;
• NC ∈ {1.5, 1.8, 2.1};• SF ∈ {0.5, 0.75, 1, variable}, where “variable” means that for each activity the num-
ber of required skills was randomly generated in the set {2, 3, 4}. For instance,
SF = 1 implies that all activities require all the 4 available skills;
• For each SF , the corresponding MRS values and number of resources are presented
in Table 2. Each SF and MRS combination is associated with 18 instances;
19

• Each activity requires {1, 2, 3} resources for each skill needed for its execution;
• Each resource masters {1, 2, 3} skills among the 4 available skills.
For each combination of SF , NC and MRS, 6 instances were generated.
SF = 1 SF = 0.75 SF = 0.5 SF = var.
MRS K MRS K MRS K MRS K
0.1250 20 0.1250 10 0.1250 10 0.1250 10
0.1563 25 0.1667 20 0.1625 13 0.1667 20
0.1875 30 0.2083 25 0.1875 15 0.2083 25
Table 2: Modified Resource Strength and number of resources for instances in Set 1.
Set 2 :
• 40 activities with processing times randomly generated in the set {1, . . . , 10};
• 4 skills;
• NC ∈ {1.5, 1.8, 2.1};
• SF ∈ {0.5, 0.75, 1, variable}, where “variable” means that for each activity the num-
ber of required skills was randomly generated in the set {2, 3, 4};
• For each SF , the corresponding MRS values and number of resources are presented
in Table 3; Each SF and MRS combination is associated with 18 instances;
• Each activity requires {1, 2, 3, 4, 5, 6, 7} resources for each skill needed for its execu-
tion;
• Each resource masters {1, 2, 3} skills among the 4 available skills.
Similarly to Set 1, for each combination of SF , NC and MRS, 6 instances were gen-
erated.
SF = 1 SF = 0.75 SF = 0.5 SF = var.
MRS K MRS K MRS K MRS K
0.0625 40 0.0625 30 0.0625 20 0.0625 30
0.0781 50 0.0792 38 0.0781 25 0.0792 38
0.0938 60 0.0938 45 0.0938 30 0.0938 45
Table 3: Modified Resource Strength and number of resources for instances in Set 2.
20

5.2 BRKGA Configuration
A configuration of a BRKGA can be defined as a combination of the values taken by its
parameters. From the literature on genetic algorithms and their applications, we observe
that no method exists for identifying the best configuration. Hence it becomes necessary
to conduct a series of computational tests to define a good set of values for the parameters
of the BRKGA.
In order to identify such values, we performed a set of computational tests on all 216
instances of Set 1. Considering small sized test beds could compromise the representative-
ness of the 36 distinct classes of instances defined by the combination of their values of SF ,
NC, and MRS. Moreover we assumed that building a hybrid set consisting of instances
from Set 1 and Set 2 would not allow a greater variability of the values of parameters
which define an instance for this problem, since the proportions of these values, which are
indexed to the size of the instances, remain roughly constant for both sets of instances.
Therefore, we expect the BRKGA to have a similar performance, for a given configuration,
on both Set 1 and Set 2. Thus we assume that a good configuration for Set 1 will also
have a good performance for the larger instances in Set 2.
In order to get an indication on the ranges of the values taken by the parameters of the
BRKGA, we referred again to Goncalves et al. (2008), Mendes et al. (2009) and Goncalves
et al. (2011).
Unlike the BRKGA frameworks proposed in the aforementioned studies, we consider 3
variants of the BRKGA with regard to the type of decoder employed namely: (i) all the
chromosomes are decoded with the PSS presented in Section 2.2.3; (ii) all the chromosomes
are decoded with the SSS proposed in Section 2.2.4; and (iii) the decoder mechanism
applied to each chromosome depends on the value for the allele in the position n+K + 1.
These experiments allow us to evaluate if one of the variants performs better than the
others. Regarding the values of the other BRKGA parameters, Table 4 presents the ranges
of values considered for each one of them.
21

Population size (p) 5× n chromosomes
Probability of inheriting an allele from the elite parent (ρe) 0.7
Percentage of elite solutions in each generation (pe) {10, 15}Percentage of mutant solutions in each generation (pm) {15, 20, 30}Decoder (δ)* {PSS,SSS,Both}Stopping criterion (G) 5× n generations
Fitness makespan (smaller is better)
*We considered both original and reversed precedence networks.
Table 4: Instance Set 1:Range of values tested for each BRKGA parameter.
A total of 18 distinct configurations are obtained by combining the values in Table 4.
Each configuration of the BRKGA is run 5 times for each instance in Set 1 (using a distinct
seed for random number generation at each run). Thus it is possible to compute, for each
instance, its associated average and minimum makespan values. The runs are independent
from each other and terminate when the established maximum number of generations is
reached. We present in Table 5 the overall results for every configuration tested. This Table
consists of two main sets of columns: (i) columns 4-8 refer to the results after n2
generations
and (ii) columns 9-13 to the results after 5 × n generations. The scheduling generation
scheme considered and the values of pe and pm are presented in columns 1-3, respectively.
Each row depicts the average values for the 216 instances of Set 1. In terms of gaps, their
average and minimum values are indicated in columns 4 and 9, and columns 5 and 10,
respectively. The average makespan values and their associated standard deviations are
presented in columns 6 and 11, and columns 7 and 12, respectively. Columns 8 and 13
contain the total time spent in the 5 runs until reaching n2
generations and 5×n generations
respectively. Each gap value is computed as:
gap =ZB − ZLB
ZLB× 100 (1)
where ZB denotes the upper bound provided by the BRKGA and ZLB denotes the optimal
value or the best known lower bound.
22

n2
= 10 generations 5× n = 100 generations
δpe(%)
pm(%)
Gap (%) MakespanTotal time
(CPU s)Gap (%) Makespan
Total time
(CPU s)
Avg. Min. Avg.Std.
dev.Avg. Min. Avg.
Std.
dev.
PSS 10 15 1.19 0.88 52.296 0.163 55.188 0.92 0.75 52.162 0.095 538.735
20 1.19 0.83 52.298 0.196 55.322 0.87 0.70 52.135 0.112 540.412
30 1.17 0.86 52.294 0.176 55.558 0.84 0.69 52.114 0.080 543.484
15 15 1.20 0.87 52.300 0.179 52.668 0.89 0.73 52.141 0.098 510.533
20 1.18 0.87 52.294 0.161 52.688 0.88 0.72 52.136 0.085 510.715
30 1.25 0.92 52.331 0.179 52.785 0.87 0.72 52.130 0.085 513.483
SSS 10 15 1.71 1.08 52.531 0.301 76.939 1.21 0.83 52.281 0.191 750.451
20 1.79 1.23 52.582 0.278 77.054 1.23 0.81 52.302 0.221 753.332
30 1.82 1.28 52.604 0.274 77.079 1.20 0.85 52.284 0.195 754.394
15 15 1.68 1.11 52.531 0.278 73.416 1.19 0.83 52.279 0.205 712.074
20 1.82 1.16 52.600 0.296 73.436 1.16 0.79 52.262 0.193 712.910
30 1.82 1.24 52.606 0.286 73.477 1.10 0.75 52.239 0.178 714.160
Both 10 15 1.19 0.82 52.298 0.191 63.326 0.92 0.73 52.158 0.109 613.704
20 1.23 0.86 52.314 0.197 63.668 0.89 0.72 52.144 0.118 617.794
30 1.21 0.78 52.310 0.225 64.405 0.88 0.74 52.140 0.086 627.068
15 15 1.20 0.84 52.303 0.186 60.838 0.89 0.73 52.142 0.094 585.492
20 1.23 0.87 52.317 0.191 60.640 0.86 0.71 52.131 0.097 583.218
30 1.26 0.90 52.333 0.203 61.265 0.86 0.72 52.124 0.083 592.537
Table 5: Overall results for all 18 BRKGA tested configurations.
The makespan values and gaps presented in Table 5 allow us to conclude that, as
expected, with 5 × n generations it was possible to obtain better results than with n2
generations. However this improvement in the quality of the feasible solutions was achieved
at the expense of about 10 times more CPU time, which seems not to be compensatory.
Regarding the decoder, the use of the PSS heuristic in all the chromosomes provided
the best results in terms of the upper bounds and CPU time. Among the 6 combinations
of pe and pm associated with this decoder we will adopt pe = 10 and pm = 30 because this
combination originated lower average gaps and makespans.
The computational results provided by Almeida et al. (2016) show that higher gap
values were obtained for instances having less resources. As those instances were also
the ones that required less computational time, we take advantage of this behavior and
consider a population indexed not only to the number of activities but also to the number
23

of resources in each instance. We also used all the instances in Set 1 to test p = 5×dn×nKe.
By fixing the number of activities (which is 20 for all instances in Set 1 ), this value of p
originates larger populations for the instances with a smaller number of resources. The
computational results obtained (and which are not presented due to space limitations of
the paper) show that this p value yields an improvement in the average solution gaps (when
compared to the population of p = 5 × n) of roughly 6%, at a cost of an 8% increase in
the total time.
In the next Section we present the results for both instance sets considering the selected
configuration which is associated with the following parameters’ values: p = 5 × dn×nKe,
pe = 10%, pm = 30%, ρe = 0.7 and δ = PSS. The maximum number of generations is
used as the stopping criterion and it is set to n2
generations.
5.3 Computational results
In this section we present and discuss the computational results obtained with the
adopted configuration referred above. We start with the results for instance Set 1 and
afterwards we present the results for instance Set 2.
Set 1 :
We begin by presenting Table 6 where the instances are grouped into 36 classes defined by
SF , NC, and MRS, and each row refers to the average results of 6 instances. The gaps
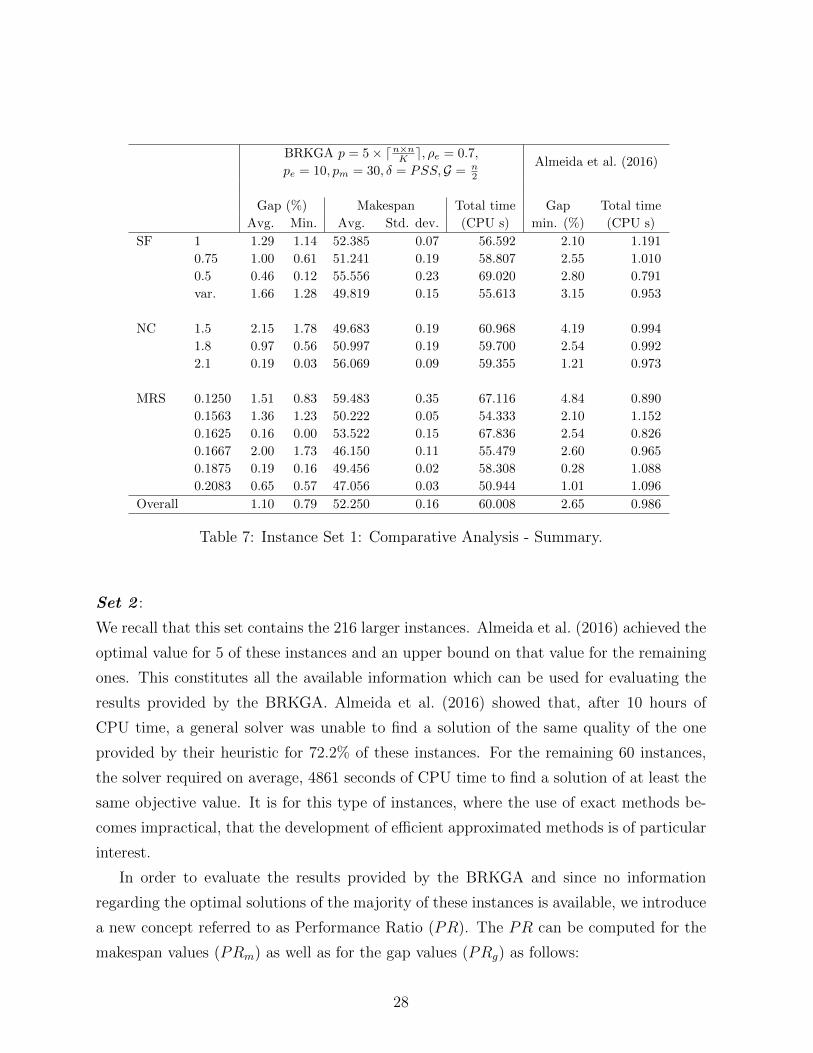
were computed using expression (1) defined in the previous section. Table 7 summarizes
these results in an aggregated form.
Table 6 has a total of 10 columns: (i) columns 1-3 indicate the instances’ characteristics;
(ii) columns 4-8 contain the results obtained with the BRKGA, and (iii) columns 9-10 refer
to the results provided by the heuristic of Almeida et al. (2016). More precisely, columns
4-5 are associated with the average and minimum gaps achieved, columns 6-7 depict the
average makespan values and their associated standard deviation, respectively and column
8 contains the total time associated with the 5 runs performed by the BRKGA. Columns
9-10 present the minimum gaps obtained by the heuristic proposed in Almeida et al. (2016)
and the associated total time, respectively. Table 7 follows the same structure of Table 6,
presented above.
From Table 6 we observe that the average and minimum gaps achieved by the BRKGA
improve the results provided by Almeida et al. (2016) in 26 and 27 out of the 36 classes
24

of instances, respectively. In terms of average and minimum gaps, the BRKGA achieved
the same results as the heuristic of Almeida et al. (2016) in 8 classes of instances, 7 of
which correspond to a gap of 0%. The BRKGA achieved 0% gaps for all instances in
10 and 19 classes of instances regarding average and minimum gaps, respectively. The
12 classes of instances whose minimum gaps obtained by the BRKGA are highlighted
in boldface indicate that the BRKGA was able to find the optimal value of all these 72
instances but the constructive heuristic of Almeida et al. (2016) was not. The higher gaps
achieved by the BRKGA are associated with instances having SF = variable, NC = 1.5,
MRS = 0.1667. The higher values of the standard deviation of the makespan occur more
commonly in the sets of instances associated with the smallest values of MRS. These
correspond to the hardest instances with fewer resources, hence having larger populations
and thus consuming more computational time. The last line of this table contains the
average results for the 216 instances and allow us to observe that the gaps were reduced
from 2.65% to 1.10% in the case of the average gaps and to 0.79% for the minimum gaps.
Hence, regarding the minimum gaps, the values provided by the BRKGA are roughly 3.4
times smaller than the ones achieved by Almeida et al. (2016). In terms of computational
time, the BRKGA requires an average time of one minute while the heuristic by Almeida
et al. (2016) needs on average one second. In spite of this difference in the computational
times, the supremacy of the BRKGA is clear in terms of the quality of the obtained gaps
and one minute of average time is not significant due to the complexity of the PSPFR.
25

BRKGA p = 5× dn×nK e, ρe = 0.7,
pe = 10, pm = 30, δ = PSS,G = n2
Almeida et al. (2016)
Gap (%) Makespan Total time
(CPU s)
Gap
min. (%)
Total time
(CPU s)SF NC MRS Avg. Min. Avg. Std. dev.
1 1.5 0.1250 6.33 6.13 52.433 0.15 61.027 9.47 1.096
0.1563 2.89 2.89 49.167 0.00 55.743 4.37 1.145
0.1875 0.00 0.00 48.667 0.00 56.852 0.00 1.374
1.8 0.1250 0.73 0.00 53.033 0.29 59.165 1.57 1.051
0.1563 1.19 0.79 47.667 0.15 54.801 1.92 1.195
0.1875 0.46 0.46 45.833 0.00 54.293 0.46 1.333
2.1 0.1250 0.00 0.00 64.167 0.00 60.835 1.07 1.103
0.1563 0.00 0.00 53.833 0.00 52.455 0.00 1.116
0.1875 0.00 0.00 56.667 0.00 54.155 0.00 1.304
0.75 1.5 0.1250 0.70 0.53 59.767 0.17 69.142 3.98 0.976
0.1667 0.33 0.00 44.133 0.17 57.961 0.90 1.000
0.2083 2.68 2.39 51.433 0.09 54.167 3.84 1.145
1.8 0.1250 2.04 0.82 60.433 0.61 66.369 6.47 0.916
0.1667 2.34 1.72 47.800 0.22 54.704 2.93 0.952
0.2083 0.00 0.00 49.833 0.00 52.925 0.00 1.117
2.1 0.1250 0.95 0.00 59.600 0.43 65.550 3.99 0.867
0.1667 0.00 0.00 43.167 0.00 56.201 0.00 0.984
0.2083 0.00 0.00 45.000 0.00 52.240 0.79 1.137
0.5 1.5 0.1250 1.79 0.26 61.633 0.83 81.355 6.17 0.749
0.1625 0.20 0.00 49.933 0.22 67.694 4.27 0.796
0.1875 0.51 0.51 41.667 0.00 64.173 0.88 0.890
1.8 0.1250 0.79 0.34 60.267 0.24 72.780 5.19 0.658
0.1625 0.29 0.00 55.467 0.24 70.753 2.42 0.872
0.1875 0.14 0.00 47.900 0.09 62.440 0.36 0.846
2.1 0.1250 0.42 0.00 71.967 0.45 78.988 5.00 0.713
0.1625 0.00 0.00 55.167 0.00 65.061 0.93 0.809
0.1875 0.00 0.00 56.000 0.00 57.938 0.00 0.783
var. 1.5 0.1250 3.12 1.58 52.467 0.61 60.477 7.55 0.765
0.1667 6.75 6.56 47.233 0.09 53.469 7.41 0.939
0.2083 0.49 0.49 37.667 0.00 49.560 1.42 1.049
1.8 0.1250 0.91 0.00 54.333 0.35 63.006 5.16 0.872
0.1667 2.08 2.08 45.667 0.00 55.702 4.02 1.002
0.2083 0.71 0.51 43.733 0.09 49.464 0.00 1.093
2.1 0.1250 0.38 0.32 63.700 0.07 66.694 2.46 0.916
0.1667 0.52 0.00 48.900 0.17 54.834 0.33 0.911
0.2083 0.00 0.00 54.667 0.00 47.308 0.00 1.033
Overall 1.10 0.79 52.250 0.16 60.008 2.65 0.986
Table 6: Instance Set 1: Comparative Analysis - Detail.
26

From Table 7 one can observe that, for the BRKGA, as SF decreases the gaps also
decrease while the associated computational effort increases. This increase may be justified
with the fact that instances with a smaller SF have fewer resources and thus originate
larger populations. For instances having SF = 0.5, the BRKGA achieved solutions which
correspond to an improvement of 6 and 22.8 times the results of Almeida et al. (2016),
regarding average and minimum gaps, respectively. Despite the instances associated with
SF = 1 being associated with a smaller improvement, the minimum gaps provided by the
BRKGA are roughly half of the ones obtained by Almeida et al. (2016).
In terms of the network complexity NC, an increase in this parameter leads, as ex-
pected, to a reduction in the gaps for the BRKGA. The BRKGA was able to reduce the
minimum gaps of the instances having NC = 2.1 to nearly 0%.
The instances with MRS = 0.1625 were the ones where the BRKGA produced the
smallest gaps with values of 0.16% and 0% for average and minimum gaps, respectively.
We point out that all these instances have SF = 0.5 and thus correspond to instances that
were among the hardest to tackle by Almeida et al. (2016). In this set of hard instances
we find also the ones associated with small values of MRS, such as MRS = 0.1250, were
the BRKGA originates minimum gaps of 0.83%. This correspond to a major improvement
since the heuristic of Almeida et al. (2016) produced gaps roughly 6 times higher.
27
BRKGA p = 5× dn×nK e, ρe = 0.7,
pe = 10, pm = 30, δ = PSS,G = n2
Almeida et al. (2016)
Gap (%) Makespan Total time
(CPU s)
Gap
min. (%)
Total time
(CPU s)Avg. Min. Avg. Std. dev.
SF 1 1.29 1.14 52.385 0.07 56.592 2.10 1.191
0.75 1.00 0.61 51.241 0.19 58.807 2.55 1.010
0.5 0.46 0.12 55.556 0.23 69.020 2.80 0.791
var. 1.66 1.28 49.819 0.15 55.613 3.15 0.953
NC 1.5 2.15 1.78 49.683 0.19 60.968 4.19 0.994
1.8 0.97 0.56 50.997 0.19 59.700 2.54 0.992
2.1 0.19 0.03 56.069 0.09 59.355 1.21 0.973
MRS 0.1250 1.51 0.83 59.483 0.35 67.116 4.84 0.890
0.1563 1.36 1.23 50.222 0.05 54.333 2.10 1.152
0.1625 0.16 0.00 53.522 0.15 67.836 2.54 0.826
0.1667 2.00 1.73 46.150 0.11 55.479 2.60 0.965
0.1875 0.19 0.16 49.456 0.02 58.308 0.28 1.088
0.2083 0.65 0.57 47.056 0.03 50.944 1.01 1.096
Overall 1.10 0.79 52.250 0.16 60.008 2.65 0.986
Table 7: Instance Set 1: Comparative Analysis - Summary.
Set 2 :
We recall that this set contains the 216 larger instances. Almeida et al. (2016) achieved the
optimal value for 5 of these instances and an upper bound on that value for the remaining
ones. This constitutes all the available information which can be used for evaluating the
results provided by the BRKGA. Almeida et al. (2016) showed that, after 10 hours of
CPU time, a general solver was unable to find a solution of the same quality of the one
provided by their heuristic for 72.2% of these instances. For the remaining 60 instances,
the solver required on average, 4861 seconds of CPU time to find a solution of at least the
same objective value. It is for this type of instances, where the use of exact methods be-
comes impractical, that the development of efficient approximated methods is of particular
interest.
In order to evaluate the results provided by the BRKGA and since no information
regarding the optimal solutions of the majority of these instances is available, we introduce
a new concept referred to as Performance Ratio (PR). The PR can be computed for the
makespan values (PRm) as well as for the gap values (PRg) as follows:
28

PRm = ZB∗−ZH
ZH × 100%, regarding makespan values
PRg = DB∗−DH
DH × 100%, regarding gap values
where ZB∗
(DB∗) denotes the best upper bound (minimum gap) provided by the BRKGA
and ZH (DH) denotes the best upper bound (minimum gap) obtained by the heuristic
of Almeida et al. (2016). The gaps were computed using expression (1), presented in
Section 5.2, with the lower bound for each instance being equal to the length of the cor-
responding critical path. For example, if for one instance DB∗=8% and DH =10% then
PRg= -20% meaning that the BRKGA provide a gap 20% lower than the heuristic by
Almeida et al. (2016). The analysis of improvements also from the makespan point of
view (PRm) is of great interest when no lower bound besides the critical path length is
available. The latter is often a poor lower bound for this problem (Correia et al. 2012)
because it only considers information related to the precedence network. For fixed values
of SF and NC, a decrease of the value of MRS usually compromises the objective value,
contributing to its increase. The latter results in a larger distance between the optimal
value and the critical path length value. It is for this type of instances, particularly when
the best known lower bound is eventually poor, that the use of a makespan performance
measure is of great importance.
Table 8 presents the detailed results for each class of instances defined by the combina-
tion of the values of SF , NC and MRS. Each row of this Table corresponds to an average
of 6 instances. These results are summarized in Table 9.
The 10 columns of Table 8 have the following meaning: (i) columns 1-4 contain the char-
acteristics of each class of instances; (ii) columns 5 and 6 show the results associated with
the PR values in terms of makespan (PRm) and gap (PRg), respectively; (iii) columns 7-9
present the results obtained by the proposed BRKGA, namely average makespan, standard
deviation and total CPU time taken in the 5 runs, respectively; and (iii) column 10 depicts
the total time required by the heuristic proposed by Almeida et al. (2016). The BRKGA
also found the optimal solutions for all the 5 instances for which Almeida et al. (2016)
identified their optimal value. We did not take into account these instances for computing
the values presented in this table and therefore we indicate, in the untitled column 4, inside
parentheses, the number of instances not considered for the results presented. Table 9 is
structured as Table 8.
29

From Table 8 we observe a general improvement in terms of both PRm and PRg. The
BRKGA performed better than the heuristic of Almeida et al. (2016) in all the 36 classes
of instances. The best results in terms of PRm were generally attained for the instances
associated with smaller values of MRS, with a particular emphasis for the instances having
SF = 0.5 and MRS = 0.0625. In fact, the class of instances which reported the highest
improvement regarding PRm (13%) is actually defined by SF = 0.5, NC = 1.5 and
MRS = 0.0625. It was also the one associated with the highest standard deviation of the
average makespan value, which indicates an increased difficulty faced by the BRKGA in
attaining solutions of the same fitness consistently for these instances. Analyzing the PRg
values, these seem to follow a different direction. This can be associated with the fact
of smaller makespan values being associated with instances having higher values of MRS
which may allow a greater degree of parallelization, for fixed SF and NC values. In fact,
considering SF = 0.5, the class of instances with NC = 2.1 and MRS = 0.0938 is the one
associated with the smallest improvement in the makespan (PRm = −2.30%) and the one
having the greatest gap improvement (PRg = −35.18%), hence validating our reasoning
of evaluating the results of the BRKGA in terms of gap and makespan improvement from
the results of Almeida et al. (2016).
30

Performance
Ratio (%)
BRKGA p = 5× dn×nK e, ρe = 0.7,
pe = 10, pm = 30, δ = PSS,G = n2
Almeida et al. (2016)
Makespan Total time
(CPU s)
Total time
(CPU s)SF NC MRS PRm PRg Avg. Std. dev.
1 1.5 0.0625 -5.92 -11.79 97.90 0.78 1158.783 4.718
0.0781 -4.36 -12.77 79.30 0.85 1478.504 6.726
0.0938 (1) -3.06 -18.70 70.48 0.69 1791.673 9.007
1.8 0.0625 -6.49 -14.61 100.53 1.03 1136.121 4.598
0.0781 -5.17 -27.61 82.40 0.83 1455.465 6.634
0.0938 (1) -2.41 -33.12 65.16 0.60 1776.367 9.009
2.1 0.0625 -5.33 -14.10 100.00 0.77 1132.525 4.611
0.0781 -3.02 -19.39 85.90 0.56 1451.702 6.632
0.0938 -1.68 -26.39 67.73 0.46 1726.694 9.176
0.75 1.5 0.0625 -6.20 -12.67 110.30 0.66 1119.035 3.356
0.0792 -4.75 -14.07 81.97 0.86 1102.655 4.085
0.0938 -3.64 -16.33 69.80 0.61 1135.340 5.213
1.8 0.0625 -8.54 -16.92 110.73 1.07 1142.319 3.335
0.0792 -4.83 -19.95 83.77 0.96 1092.978 4.182
0.0938 (2) -3.52 -27.59 70.80 0.87 1115.094 5.101
2.1 0.0625 -7.73 -20.69 108.97 1.11 1076.178 3.257
0.0792 -3.32 -19.42 77.40 0.67 1045.309 4.005
0.0938 -1.44 -18.13 71.15 0.54 1109.151 4.940
0.5 1.5 0.0625 -13.86 -25.82 120.77 2.41 1139.316 2.468
0.0781 -9.22 -20.41 98.43 1.39 1127.840 2.965
0.0938 -3.62 -24.49 81.50 0.83 1100.186 3.231
1.8 0.0625 -12.77 -25.88 129.20 1.71 1087.627 2.398
0.0781 -8.58 -27.97 88.17 1.19 1050.740 2.820
0.0938 -6.85 -29.21 77.57 0.94 1134.217 3.489
2.1 0.0625 -10.60 -22.31 120.93 1.63 1109.013 2.510
0.0781 -6.58 -22.85 87.10 0.72 1043.272 2.796
0.0938 -2.30 -35.18 75.40 0.32 1027.204 3.085
var 1.5 0.0625 -7.68 -13.21 110.37 1.57 1116.957 3.286
0.0792 -6.23 -24.12 79.53 1.08 1015.154 3.778
0.0938 -2.99 -30.28 70.47 0.74 1061.472 4.731
1.8 0.0625 -9.57 -21.46 111.07 1.70 1033.412 3.075
0.0792 -3.40 -14.15 77.97 0.72 1017.991 3.820
0.0938 -4.24 -19.31 71.40 0.79 1068.803 4.906
2.1 0.0625 -6.37 -17.71 109.43 1.29 997.032 3.080
0.0792 -3.08 -20.06 88.47 0.54 1052.956 3.973
0.0938 (1) -2.74 -21.49 73.72 0.89 1018.186 4.658
Overall (5) -5.69 -21.10 89.49 0.96 1169.095 4.435
Table 8: Instance Set 2: Comparative Analysis - Detail.
31

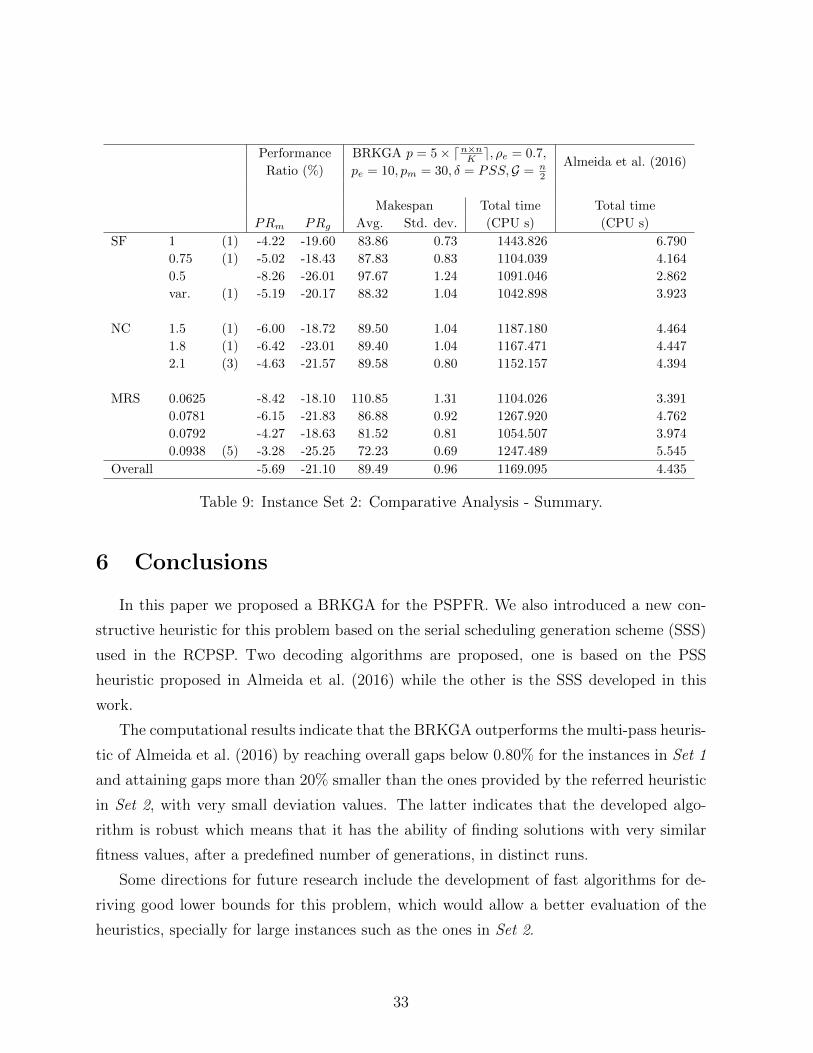
From Table 9 we observe a global improvement from the solutions provided by the
heuristic. The quality of the results achieved by the BRKGA increases as the values of
SF become smaller. Smaller values of SF lead to smaller computational effort. Due to
their hardness, instances having SF = 0.5 are associated with higher values of standard
deviation of makespan, approximately 1.27% of their average makespan value, a similar
behavior to what was observed for Set 1. Moreover these instances achieved the best
results regarding both PRm and PRg. Overall, and as expected, an increase in the NC
leads to a slight decrease in computational time. We note that the 3 (out of the 5)
instances where the heuristic of Almeida et al. (2016) reached the optimal solution, are
associated with NC = 2.1. Instances having higher values of NC usually tend to be
easier because potentially a smaller number of activities can be processed in parallel due
to the increased number of precedence relations, for a fixed number of activities. Amongst
the different NC values, the largest improvements in terms of both PRm and PRg were
achieved for the instances having NC = 1.8. Regarding MRS, the best results in terms
of PRm and PRg are associated with MRS = 0.0625 and MRS = 0.0938, respectively.
The latter is explained by the fact of the instances associated with higher values of MRS
values being associated with smaller values of average makespan, and as discussed before,
these instances tend to allow a greater degree of parallelization which tend to allow their
corresponding optimal values to be closer to the value of the associated critical path length.
We noticed that the 5 instances for which the heuristic of Almeida et al. (2016) attains
their optimal solutions, belong to the set of instances having the most resources, associated
with the highest value of MRS considered: MRS = 0.0938. We observe overall values
of PRm = −5.69% and PRg = −21.10%. This constitutes a great improvement from the
results attained by the previously developed multi-pass heuristic in Almeida et al. (2016).
The standard deviation values are larger for instances having smaller values of SF , NC
or MRS. In terms of computational time, we must not forget that these instances have
roughly the double of resources and activities as well as a population and a stopping
criterion with twice the size of the ones considered in Set 1.
32
Performance
Ratio (%)
BRKGA p = 5× dn×nK e, ρe = 0.7,
pe = 10, pm = 30, δ = PSS,G = n2
Almeida et al. (2016)
Makespan Total time
(CPU s)
Total time
(CPU s)PRm PRg Avg. Std. dev.
SF 1 (1) -4.22 -19.60 83.86 0.73 1443.826 6.790
0.75 (1) -5.02 -18.43 87.83 0.83 1104.039 4.164
0.5 -8.26 -26.01 97.67 1.24 1091.046 2.862
var. (1) -5.19 -20.17 88.32 1.04 1042.898 3.923
NC 1.5 (1) -6.00 -18.72 89.50 1.04 1187.180 4.464
1.8 (1) -6.42 -23.01 89.40 1.04 1167.471 4.447
2.1 (3) -4.63 -21.57 89.58 0.80 1152.157 4.394
MRS 0.0625 -8.42 -18.10 110.85 1.31 1104.026 3.391
0.0781 -6.15 -21.83 86.88 0.92 1267.920 4.762
0.0792 -4.27 -18.63 81.52 0.81 1054.507 3.974
0.0938 (5) -3.28 -25.25 72.23 0.69 1247.489 5.545
Overall -5.69 -21.10 89.49 0.96 1169.095 4.435
Table 9: Instance Set 2: Comparative Analysis - Summary.
6 Conclusions
In this paper we proposed a BRKGA for the PSPFR. We also introduced a new con-
structive heuristic for this problem based on the serial scheduling generation scheme (SSS)
used in the RCPSP. Two decoding algorithms are proposed, one is based on the PSS
heuristic proposed in Almeida et al. (2016) while the other is the SSS developed in this
work.
The computational results indicate that the BRKGA outperforms the multi-pass heuris-
tic of Almeida et al. (2016) by reaching overall gaps below 0.80% for the instances in Set 1
and attaining gaps more than 20% smaller than the ones provided by the referred heuristic
in Set 2, with very small deviation values. The latter indicates that the developed algo-
rithm is robust which means that it has the ability of finding solutions with very similar
fitness values, after a predefined number of generations, in distinct runs.
Some directions for future research include the development of fast algorithms for de-
riving good lower bounds for this problem, which would allow a better evaluation of the
heuristics, specially for large instances such as the ones in Set 2.
33

Acknowledgements
This work was supported by National Funding from FCT - Fundacao para a Ciencia e a
Tecnologia, under the projects Fundacao para a Ciencia e a Tecnologia, UID/MAT/04561/2013
(CMAF-CIO/FCUL) and UID/MAT/00297/2013 (CMA/FCT/UNL).
References
Almeida, B. F., Correia, I., and Saldanha-da-Gama, F. (2015). An Instance Generator
for the Multi-Skill Resource-Constrained Project Scheduling Problem. Technical report,
Faculdade de Ciencias da Universidade de Lisboa — Centro de Matematica, Aplicacoes
Fundamentais e Investigacao Operacional. Available at https://ciencias.ulisboa.
pt/sites/default/files/fcul/unidinvestig/cmaf-cio/SGama.pdf.
Almeida, B. F., Correia, I., and Saldanha-da-Gama, F. (2016). Priority-based heuristics
for the multi-skill resource constrained project scheduling problem. Expert Systems with
Applications, 57:91–103.
Bean, J. C. (1994). Genetic algorithms and random keys for sequencing and optimization.
ORSA Journal on Computing, 6(2):154–160.
Brucker, P., Drexl, A., Mohring, R., Neumann, K., and Pesch, E. (1999). Resource-
constrained project scheduling: Notation, classification, models, and methods. European
Journal of Operational Research, 112(1):3–41.
Correia, I., Lourenco, L. L., and Saldanha-da-Gama, F. (2012). Project scheduling with
flexible resources: formulation and inequalities. OR Spectrum, 34:635–663.
Correia, I. and Saldanha-da-Gama, F. (2014). The impact of fixed and variable costs in
a multi-skill project scheduling problem: An empirical study. Computers & Industrial
Engineering, 72:230–238.
Correia, I. and Saldanha-da-Gama, F. (2015). A modeling framework for project staffing
and scheduling problems. In Schwindt, C. and Zimmermann, J., editors, Handbook on
Project Management and Scheduling, volume 1, pages 547–564. Springer.
34

Demeulemeester, E. L. and Herroelen, W. (2002). Project Scheduling: A Research Hand-
book. Springer.
Goldberg, D. E. (1989). Genetic Algorithms in Search, Optimization and Machine Learn-
ing. Addison-Wesley Longman Publishing Co., Inc.
Goncalves, J., Mendes, J., and Resende, M. (2008). A genetic algorithm for the resource
constrained multi-project scheduling problem. European Journal of Operational Re-
search, 189(3):1171 – 1190.
Goncalves, J. F. and Resende, M. G. (2011). Biased random-key genetic algorithms for
combinatorial optimization. Journal of Heuristics, 17:487–525.
Goncalves, J. F. and Resende, M. G. (2013). A biased random key genetic algorithm
for 2D and 3D bin packing problems. International Journal of Production Economics,
145(2):500 – 510.
Goncalves, J. F. and Resende, M. G. (2015). A biased random-key genetic algorithm for
the unequal area facility layout problem. European Journal of Operational Research,
246(1):86 – 107.
Goncalves, J. F., Resende, M. G., and Mendes, J. J. (2011). A biased random-key ge-
netic algorithm with forward-backward improvement for the resource constrained project
scheduling problem. Journal of Heuristics, 17(5):467–486.
Gutjahr, W. J., Katzensteiner, S., Reiter, P., Stummer, C., and Denk, M. (2008).
Competence-driven project portfolio selection, scheduling and staff assignment. Cen-
tral European Journal of Operations Research, 16:281–306.
Hartmann, S. (2002). A self-adapting genetic algorithm for project scheduling under re-
source constraints. Naval Research Logistics (NRL), 49(5):433–448.
Hartmann, S. and Briskorn, D. (2010). A survey of variants and extensions of the resource-
constrained project scheduling problem. European Journal of Operational Research,
207(1):1–14.
Heimerl, C. and Kolisch, R. (2010). Scheduling and staffing multiple projects with a multi-
skilled workforce. OR Spectrum, 32:343–368.
35

Herroelen, W. S. and Demeulemeester, E. L. (1998). Resource-constrained project schedul-
ing: A survey of recent developments. Computers and Operations Research, 25:279–302.
Holland, J. H. (1975). Adaptation in Natural and Artificial Systems. University of Michigan
Press.
Klein, R. (2000). Bidirectional planning: improving priority rule-based heuristics for
scheduling resource-constrained projects. European Journal of Operational Research,
127:619–638.
Kolisch, R. (1996). Serial and parallel resource-constrained project scheduling methods re-
visited: Theory and computation. European Journal of Operational Research, 90(2):320
– 333.
Li, H. and Womer, K. (2009). Scheduling projects with multi-skilled personnel by a hybrid
MILP/CP benders decomposition algorithm. Journal of Scheduling, 12:281–298.
Li, K. and Willis, R. (1992). An alternative scheduling technique for resource constrained
project scheduling. European Journal of Operational Research, 56:370–379.
Mendes, J., Goncalves, J., and Resende, M. (2009). A random key based genetic algorithm
for the resource constrained project scheduling problem. Computers and Operations
Research, 36(1):92 – 109.
Ozdamar, L. (1999). A genetic algorithm approach to a general category project scheduling
problem. IEEE Transactions on Systems, Man and Cybernetics, 29:44–69.
Ruiz, E., Albareda-Sambola, M., Fernandez, E., and Resende, M. G. (2015). A biased
random-key genetic algorithm for the capacitated minimum spanning tree problem. Com-
puters and Operations Research, 57(C):95–108.
Spears, W. M. and Jong, K. A. D. (1991). On the virtues of Parameterized Uniform
Crossover. In Proceedings of the Fourth International Conference on Genetic Algorithms,
pages 230–236.
Weglarz, J., Jozefowska, J., Mika, M., and Waligora, G. (2011). Project scheduling with
finite or infinite number of activity processing modes - a survey. European Journal of
Operational Research, 208:177–205.
36
![[J22]on Parallelizing the Multiprocessor Scheduling Problem](https://static.fdocuments.net/doc/165x107/577d2c881a28ab4e1eac7be1/j22on-parallelizing-the-multiprocessor-scheduling-problem.jpg)

















