A Boltzmann-type kinetic approach to the modeling of...
37
The spatially homogeneous model A Boltzmann-type kinetic approach to the modeling of vehicular traffic Andrea Tosin Istituto per le Applicazioni del Calcolo “M. Picone” Consiglio Nazionale delle Ricerche Rome, Italy Mathematical Foundations of Traffic UCLA, September 28-October 2, 2015 Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
Transcript of A Boltzmann-type kinetic approach to the modeling of...
-
The spatially homogeneous model
A Boltzmann-type kinetic approach to the modelingof vehicular traffic
Andrea Tosin
Istituto per le Applicazioni del Calcolo “M. Picone”Consiglio Nazionale delle Ricerche
Rome, Italy
Mathematical Foundations of TrafficUCLA, September 28-October 2, 2015
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous model
Research outline
1 The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transitionTraffic safety
2 The spatially non-homogeneous modelModel on a single roadModel on road networks
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous model
Research outline
1 The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transitionTraffic safety
2 The spatially non-homogeneous modelModel on a single roadModel on road networks
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Basics of kinetic modeling
Microscopic state of the vehicles: speed v ∈ [0, 1]Kinetic distribution function: f = f(t, v) s.t.
f(t, v) dv = fraction of vehicles with speed in [v, v + dv] at time t ≥ 0
The Boltzmann-type kinetic equation
∂tf = Q(f, f) :=
∫ 10
∫ 10
P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ − ρf (1)
P(v∗ → v|v∗, ρ) probability distribution of speed transitions due topairwise (binary) interactions among the vehicles:∫ 1
0
P(v∗ → v|v∗, ρ) dv = 1 ∀ v∗, v∗, ρ ∈ [0, 1] (2)
Mass conservation: ρ(t) :=∫ 1
0f(t, v) dv is constant, in fact from (1)-(2):
d
dt
∫ 10
f(t, v) dv =
∫ 10
Q(f, f) dv = 0
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Basics of kinetic modeling
Microscopic state of the vehicles: speed v ∈ [0, 1]Kinetic distribution function: f = f(t, v) s.t.
f(t, v) dv = fraction of vehicles with speed in [v, v + dv] at time t ≥ 0
The Boltzmann-type kinetic equation
∂tf = Q(f, f) :=
∫ 10
∫ 10
P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ − ρf (1)
P(v∗ → v|v∗, ρ) probability distribution of speed transitions due topairwise (binary) interactions among the vehicles:∫ 1
0
P(v∗ → v|v∗, ρ) dv = 1 ∀ v∗, v∗, ρ ∈ [0, 1] (2)
Mass conservation: ρ(t) :=∫ 1
0f(t, v) dv is constant, in fact from (1)-(2):
d
dt
∫ 10
f(t, v) dv =
∫ 10
Q(f, f) dv = 0
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Basics of kinetic modeling
Microscopic state of the vehicles: speed v ∈ [0, 1]Kinetic distribution function: f = f(t, v) s.t.
f(t, v) dv = fraction of vehicles with speed in [v, v + dv] at time t ≥ 0
The Boltzmann-type kinetic equation
∂tf = Q(f, f) :=
∫ 10
∫ 10
P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ − ρf (1)
P(v∗ → v|v∗, ρ) probability distribution of speed transitions due topairwise (binary) interactions among the vehicles:∫ 1
0
P(v∗ → v|v∗, ρ) dv = 1 ∀ v∗, v∗, ρ ∈ [0, 1] (2)
Mass conservation: ρ(t) :=∫ 1
0f(t, v) dv is constant, in fact from (1)-(2):
d
dt
∫ 10
f(t, v) dv =
∫ 10
Q(f, f) dv = 0
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Basics of kinetic modeling
Microscopic state of the vehicles: speed v ∈ [0, 1]Kinetic distribution function: f = f(t, v) s.t.
f(t, v) dv = fraction of vehicles with speed in [v, v + dv] at time t ≥ 0
The Boltzmann-type kinetic equation
∂tf = Q(f, f) :=
∫ 10
∫ 10
P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ − ρf (1)
P(v∗ → v|v∗, ρ) probability distribution of speed transitions due topairwise (binary) interactions among the vehicles:∫ 1
0
P(v∗ → v|v∗, ρ) dv = 1 ∀ v∗, v∗, ρ ∈ [0, 1] (2)
Mass conservation: ρ(t) :=∫ 1
0f(t, v) dv is constant, in fact from (1)-(2):
d
dt
∫ 10
f(t, v) dv =
∫ 10
Q(f, f) dv = 0
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Basics of kinetic modeling
Microscopic state of the vehicles: speed v ∈ [0, 1]Kinetic distribution function: f = f(t, v) s.t.
f(t, v) dv = fraction of vehicles with speed in [v, v + dv] at time t ≥ 0
The Boltzmann-type kinetic equation
∂tf = Q(f, f) :=
∫ 10
∫ 10
P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ − ρf (1)
P(v∗ → v|v∗, ρ) probability distribution of speed transitions due topairwise (binary) interactions among the vehicles:∫ 1
0
P(v∗ → v|v∗, ρ) dv = 1 ∀ v∗, v∗, ρ ∈ [0, 1] (2)
Mass conservation: ρ(t) :=∫ 1
0f(t, v) dv is constant, in fact from (1)-(2):
d
dt
∫ 10
f(t, v) dv =
∫ 10
Q(f, f) dv = 0
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Qualitative properties
Let P(v∗ → ·|v∗, ρ) ∈P([0, 1]) for all v∗, v∗, ρ ∈ [0, 1]. We assume
W1(P(v∗ → ·|v∗, ρ), P(w∗ → ·|w∗, %)) ≤Lip(P) (|w∗ − v∗|+ |w∗ − v∗|+ |%− ρ|) ,
where W1 is the 1-Wasserstein metric for probability measures
Theorem (P. Freguglia, A. T., 2015 [4])
Fix ρ ∈ [0, 1] and f(0, v) =: f0(v) ∈M ρ+([0, 1]). There exists a uniquef ∈ C([0, +∞); M ρ+([0, 1])) which solves (1) in mild form:
f(t, v) = e−ρtf0(v)+
∫ t0eρ(s−t)
∫ 10
∫ 10P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ ds.
Given f01, f02 ∈M ρ+([0, 1]), the following continuous dependence estimate holds:
supt∈[0, T ]
W1(f1(t), f2(t)) ≤ e2 max{1,Lip(P)}TW1(f01, f02)
up to an arbitrarily large final time T < +∞.
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Qualitative properties
Let P(v∗ → ·|v∗, ρ) ∈P([0, 1]) for all v∗, v∗, ρ ∈ [0, 1]. We assume
W1(P(v∗ → ·|v∗, ρ), P(w∗ → ·|w∗, %)) ≤Lip(P) (|w∗ − v∗|+ |w∗ − v∗|+ |%− ρ|) ,
where W1 is the 1-Wasserstein metric for probability measures
Theorem (P. Freguglia, A. T., 2015 [4])
Fix ρ ∈ [0, 1] and f(0, v) =: f0(v) ∈M ρ+([0, 1]). There exists a uniquef ∈ C([0, +∞); M ρ+([0, 1])) which solves (1) in mild form:
f(t, v) = e−ρtf0(v)+
∫ t0eρ(s−t)
∫ 10
∫ 10P(v∗ → v|v∗, ρ)f(t, v∗)f(t, v∗) dv∗ dv∗ ds.
Given f01, f02 ∈M ρ+([0, 1]), the following continuous dependence estimate holds:
supt∈[0, T ]
W1(f1(t), f2(t)) ≤ e2 max{1,Lip(P)}TW1(f01, f02)
up to an arbitrarily large final time T < +∞.
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Transition probabilities
We consider the following probability distribution of speed transitions:
P(v∗ → v|v∗, ρ) =
{(1− P )δv∗(v) + Pδmin{v∗+∆v, 1}(v) if v∗ ≤ v
∗
(1− P )δv∗(v) + Pδv∗(v) if v∗ > v∗
(3)where 0 < ∆v < 1 is given and
P = P (ρ) = 1− ργ (γ > 0)
is a probability of passing (cf. I. Prigogine, 1961)
The time-asymptotic solution of (1), with transition probabilities (3),concentrates only on speeds which are multiples of ∆v (G. Puppo, M.Semplice, A. T., G. Visconti, 2015 [6]) Picture
This suggests that, in order to study the macroscopic equilibria resultingfrom microscopic interactions, we can directly consider discrete velocitymodels
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Transition probabilities
We consider the following probability distribution of speed transitions:
P(v∗ → v|v∗, ρ) =
{(1− P )δv∗(v) + Pδmin{v∗+∆v, 1}(v) if v∗ ≤ v
∗
(1− P )δv∗(v) + Pδv∗(v) if v∗ > v∗
(3)where 0 < ∆v < 1 is given and
P = P (ρ) = 1− ργ (γ > 0)
is a probability of passing (cf. I. Prigogine, 1961)
The time-asymptotic solution of (1), with transition probabilities (3),concentrates only on speeds which are multiples of ∆v (G. Puppo, M.Semplice, A. T., G. Visconti, 2015 [6]) Picture
This suggests that, in order to study the macroscopic equilibria resultingfrom microscopic interactions, we can directly consider discrete velocitymodels
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Transition probabilities
We consider the following probability distribution of speed transitions:
P(v∗ → v|v∗, ρ) =
{(1− P )δv∗(v) + Pδmin{v∗+∆v, 1}(v) if v∗ ≤ v
∗
(1− P )δv∗(v) + Pδv∗(v) if v∗ > v∗
(3)where 0 < ∆v < 1 is given and
P = P (ρ) = 1− ργ (γ > 0)
is a probability of passing (cf. I. Prigogine, 1961)
The time-asymptotic solution of (1), with transition probabilities (3),concentrates only on speeds which are multiples of ∆v (G. Puppo, M.Semplice, A. T., G. Visconti, 2015 [6]) Picture
This suggests that, in order to study the macroscopic equilibria resultingfrom microscopic interactions, we can directly consider discrete velocitymodels
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Discrete velocity model
Define a speed lattice
vj = (j − 1)∆v, j = 1, . . . , n, ∆v = 1n−1Assume that P is a discrete probability distribution over v:
P(v∗ → v|v∗, ρ) =n∑j=1
Pj(v∗, v∗, ρ)δvj (v) (4)
Fix ρ ∈ [0, 1] and take an initial condition of the form
f0(v) =n∑j=1
f0j δvj (v) with f0j ≥ 0,
n∑j=1
f0j = ρ (5)
Theorem (P. Freguglia, A. T., 2015 [4])
The unique solution to (1) with transition probabilities (4) and initial condition (5) isf(t, v) =
∑nj=1 fj(t)δvj (v), where the fj ’s satisfy
dfj
dt=
n∑h=1
n∑k=1
Pjhk(ρ)fhfk − ρfj , fj(0) = f0j (6)
and Pjhk(ρ) := Pj(vh, vk, ρ).
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Discrete velocity model
Define a speed lattice
vj = (j − 1)∆v, j = 1, . . . , n, ∆v = 1n−1Assume that P is a discrete probability distribution over v:
P(v∗ → v|v∗, ρ) =n∑j=1
Pj(v∗, v∗, ρ)δvj (v) (4)
Fix ρ ∈ [0, 1] and take an initial condition of the form
f0(v) =n∑j=1
f0j δvj (v) with f0j ≥ 0,
n∑j=1
f0j = ρ (5)
Theorem (P. Freguglia, A. T., 2015 [4])
The unique solution to (1) with transition probabilities (4) and initial condition (5) isf(t, v) =
∑nj=1 fj(t)δvj (v), where the fj ’s satisfy
dfj
dt=
n∑h=1
n∑k=1
Pjhk(ρ)fhfk − ρfj , fj(0) = f0j (6)
and Pjhk(ρ) := Pj(vh, vk, ρ).
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Discrete velocity model
Define a speed lattice
vj = (j − 1)∆v, j = 1, . . . , n, ∆v = 1n−1Assume that P is a discrete probability distribution over v:
P(v∗ → v|v∗, ρ) =n∑j=1
Pj(v∗, v∗, ρ)δvj (v) (4)
Fix ρ ∈ [0, 1] and take an initial condition of the form
f0(v) =n∑j=1
f0j δvj (v) with f0j ≥ 0,
n∑j=1
f0j = ρ (5)
Theorem (P. Freguglia, A. T., 2015 [4])
The unique solution to (1) with transition probabilities (4) and initial condition (5) isf(t, v) =
∑nj=1 fj(t)δvj (v), where the fj ’s satisfy
dfj
dt=
n∑h=1
n∑k=1
Pjhk(ρ)fhfk − ρfj , fj(0) = f0j (6)
and Pjhk(ρ) := Pj(vh, vk, ρ).
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Discrete velocity model
Define a speed lattice
vj = (j − 1)∆v, j = 1, . . . , n, ∆v = 1n−1Assume that P is a discrete probability distribution over v:
P(v∗ → v|v∗, ρ) =n∑j=1
Pj(v∗, v∗, ρ)δvj (v) (4)
Fix ρ ∈ [0, 1] and take an initial condition of the form
f0(v) =n∑j=1
f0j δvj (v) with f0j ≥ 0,
n∑j=1
f0j = ρ (5)
Theorem (P. Freguglia, A. T., 2015 [4])
The unique solution to (1) with transition probabilities (4) and initial condition (5) isf(t, v) =
∑nj=1 fj(t)δvj (v), where the fj ’s satisfy
dfj
dt=
n∑h=1
n∑k=1
Pjhk(ρ)fhfk − ρfj , fj(0) = f0j (6)
and Pjhk(ρ) := Pj(vh, vk, ρ).
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Discrete transition probabilities
From (3) we deduce:
Pjhk(ρ) =
{(1− P )δjh + Pδj,min{h+1, n} if h ≤ k(1− P )δjk + Pδjh if h > k
(7)
which explicitly reads:
Pjhk(ρ) =
1− P if j = hP if j = h+ 1
0 otherwise
if h ≤ k, h < n
{1 if j = h
0 otherwiseif h = k = n
1− P if j = kP if j = h
0 otherwise
if h > k
We recall that P = P (ρ) = 1− ργ (γ > 0)
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Asymptotic distributions
We study the asymptotic speed distributions f∞ = {f∞j }nj=1 resultingfrom (6)-(7): f∞j = lim
t→+∞fj(t)
The f∞j ’s form a one-parameter family, the parameter being the density ρwhich is conserved
Theorem (L. Fermo, A. T., 2014 [2])
For every n ≥ 2 and every ρ ∈ [0, 1] there exists a unique stable and attractiveequilibrium f∞ of (6), which satisfies:
f∞j ≥ 0 ∀ j = 1, . . . , n,n∑j=1
f∞j = ρ
In more detail, setting ρc :=(
12
) 1γ ,
for ρ < ρc there exists only one stable and attractive equilibriumfor ρ > ρc the previous equilibrium becomes unstable and a second stableand attractive one appears
ρc is a critical value for equilibria inducing a supercritical bifurcation
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Asymptotic distributions
We study the asymptotic speed distributions f∞ = {f∞j }nj=1 resultingfrom (6)-(7): f∞j = lim
t→+∞fj(t)
The f∞j ’s form a one-parameter family, the parameter being the density ρwhich is conserved
Theorem (L. Fermo, A. T., 2014 [2])
For every n ≥ 2 and every ρ ∈ [0, 1] there exists a unique stable and attractiveequilibrium f∞ of (6), which satisfies:
f∞j ≥ 0 ∀ j = 1, . . . , n,n∑j=1
f∞j = ρ
In more detail, setting ρc :=(
12
) 1γ ,
for ρ < ρc there exists only one stable and attractive equilibriumfor ρ > ρc the previous equilibrium becomes unstable and a second stableand attractive one appears
ρc is a critical value for equilibria inducing a supercritical bifurcation
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Asymptotic distributions
We study the asymptotic speed distributions f∞ = {f∞j }nj=1 resultingfrom (6)-(7): f∞j = lim
t→+∞fj(t)
The f∞j ’s form a one-parameter family, the parameter being the density ρwhich is conserved
Theorem (L. Fermo, A. T., 2014 [2])
For every n ≥ 2 and every ρ ∈ [0, 1] there exists a unique stable and attractiveequilibrium f∞ of (6), which satisfies:
f∞j ≥ 0 ∀ j = 1, . . . , n,n∑j=1
f∞j = ρ
In more detail, setting ρc :=(
12
) 1γ ,
for ρ < ρc there exists only one stable and attractive equilibriumfor ρ > ρc the previous equilibrium becomes unstable and a second stableand attractive one appears
ρc is a critical value for equilibria inducing a supercritical bifurcation
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Asymptotic distributions
We study the asymptotic speed distributions f∞ = {f∞j }nj=1 resultingfrom (6)-(7): f∞j = lim
t→+∞fj(t)
The f∞j ’s form a one-parameter family, the parameter being the density ρwhich is conserved
Theorem (L. Fermo, A. T., 2014 [2])
For every n ≥ 2 and every ρ ∈ [0, 1] there exists a unique stable and attractiveequilibrium f∞ of (6), which satisfies:
f∞j ≥ 0 ∀ j = 1, . . . , n,n∑j=1
f∞j = ρ
In more detail, setting ρc :=(
12
) 1γ ,
for ρ < ρc there exists only one stable and attractive equilibriumfor ρ > ρc the previous equilibrium becomes unstable and a second stableand attractive one appears
ρc is a critical value for equilibria inducing a supercritical bifurcation
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Asymptotic distributions
We study the asymptotic speed distributions f∞ = {f∞j }nj=1 resultingfrom (6)-(7): f∞j = lim
t→+∞fj(t)
The f∞j ’s form a one-parameter family, the parameter being the density ρwhich is conserved
Theorem (L. Fermo, A. T., 2014 [2])
For every n ≥ 2 and every ρ ∈ [0, 1] there exists a unique stable and attractiveequilibrium f∞ of (6), which satisfies:
f∞j ≥ 0 ∀ j = 1, . . . , n,n∑j=1
f∞j = ρ
In more detail, setting ρc :=(
12
) 1γ ,
for ρ < ρc there exists only one stable and attractive equilibriumfor ρ > ρc the previous equilibrium becomes unstable and a second stableand attractive one appears
ρc is a critical value for equilibria inducing a supercritical bifurcation
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Fundamental and speed diagrams
We compute the macroscopic flux q and the mean speed u at equilibrium:
q(ρ) :=n∑j=1
vjf∞j (ρ), u(ρ) :=
q(ρ)
ρ
along with their standard deviations (dashed-red lines in the graphs below)
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 0.2 0.4 0.6 0.8 1
Bifurcation phase transition, free (ρ < ρc) to congested flow (ρ > ρc)
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Fundamental and speed diagrams
We compute the macroscopic flux q and the mean speed u at equilibrium:
q(ρ) :=n∑j=1
vjf∞j (ρ), u(ρ) :=
q(ρ)
ρ
along with their standard deviations (dashed-red lines in the graphs below)
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 0.2 0.4 0.6 0.8 1
Bifurcation phase transition, free (ρ < ρc) to congested flow (ρ > ρc)
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Traffic as a mixture of different vehicles
We consider two populations of vehicles, say cars (C) and trucks (T), withdifferent microscopic characteristics
Cars are shorter and faster while trucks are longer and slower
Speed grids:
vj = (j − 1)∆v, j = 1, . . . , np, p = C, T
∆v =1
nC − 1 , nT < nC
Characteristic lengths: `C = 1, `T > 1
Fraction of road occupancy:
s := ρC`C + ρT`T,
the admissible pairs of densities (ρC, ρT) ∈ [0, 1]2 being those s.t. s ≤ 1
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Traffic as a mixture of different vehicles
We consider two populations of vehicles, say cars (C) and trucks (T), withdifferent microscopic characteristics
Cars are shorter and faster while trucks are longer and slower
Speed grids:
vj = (j − 1)∆v, j = 1, . . . , np, p = C, T
∆v =1
nC − 1 , nT < nC
Characteristic lengths: `C = 1, `T > 1
Fraction of road occupancy:
s := ρC`C + ρT`T,
the admissible pairs of densities (ρC, ρT) ∈ [0, 1]2 being those s.t. s ≤ 1
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Traffic as a mixture of different vehicles
We consider two populations of vehicles, say cars (C) and trucks (T), withdifferent microscopic characteristics
Cars are shorter and faster while trucks are longer and slower
Speed grids:
vj = (j − 1)∆v, j = 1, . . . , np, p = C, T
∆v =1
nC − 1 , nT < nC
Characteristic lengths: `C = 1, `T > 1
Fraction of road occupancy:
s := ρC`C + ρT`T,
the admissible pairs of densities (ρC, ρT) ∈ [0, 1]2 being those s.t. s ≤ 1
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Traffic as a mixture of different vehicles
We consider two populations of vehicles, say cars (C) and trucks (T), withdifferent microscopic characteristics
Cars are shorter and faster while trucks are longer and slower
Speed grids:
vj = (j − 1)∆v, j = 1, . . . , np, p = C, T
∆v =1
nC − 1 , nT < nC
Characteristic lengths: `C = 1, `T > 1
Fraction of road occupancy:
s := ρC`C + ρT`T,
the admissible pairs of densities (ρC, ρT) ∈ [0, 1]2 being those s.t. s ≤ 1
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Traffic as a mixture of different vehicles
We consider two populations of vehicles, say cars (C) and trucks (T), withdifferent microscopic characteristics
Cars are shorter and faster while trucks are longer and slower
Speed grids:
vj = (j − 1)∆v, j = 1, . . . , np, p = C, T
∆v =1
nC − 1 , nT < nC
Characteristic lengths: `C = 1, `T > 1
Fraction of road occupancy:
s := ρC`C + ρT`T,
the admissible pairs of densities (ρC, ρT) ∈ [0, 1]2 being those s.t. s ≤ 1
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Multi-population model
Model with self- and cross-interactions:
dfpjdt
=
np∑h,k=1
Pp,jhk (ρ)fphf
pk︸ ︷︷ ︸
self-interactions
+np∑h=1
nq∑k=1
Qpq,jhk (ρ)fphf
qk︸ ︷︷ ︸
cross-interactions
−(ρC+ρT)fpj (q := ¬p)
In the transition probabilities Pp,jhk , Qpq,jhk the density ρ is replaced by the
fraction of road occupancy s, i.e., the probability of passing is now
P = P (s) = 1− sγ (γ > 0)
Theorem (G. Puppo, M. Semplice, A. T., G. Visconti, 2015 [5])
If nC = nT and `C = `T = 1 the total kinetic distribution functionfj(t) := f
Cj (t) + f
Tj (t) solves the single-population model (6).
sc :=(
12
) 1γ is again a critical value for equilibria. For s = sc the
maximum flux is attained (G. Puppo, M. Semplice, A. T., G. Visconti,2015 [5]) Picture
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Multi-population model
Model with self- and cross-interactions:
dfpjdt
=
np∑h,k=1
Pp,jhk (ρ)fphf
pk︸ ︷︷ ︸
self-interactions
+np∑h=1
nq∑k=1
Qpq,jhk (ρ)fphf
qk︸ ︷︷ ︸
cross-interactions
−(ρC+ρT)fpj (q := ¬p)
In the transition probabilities Pp,jhk , Qpq,jhk the density ρ is replaced by the
fraction of road occupancy s, i.e., the probability of passing is now
P = P (s) = 1− sγ (γ > 0)
Theorem (G. Puppo, M. Semplice, A. T., G. Visconti, 2015 [5])
If nC = nT and `C = `T = 1 the total kinetic distribution functionfj(t) := f
Cj (t) + f
Tj (t) solves the single-population model (6).
sc :=(
12
) 1γ is again a critical value for equilibria. For s = sc the
maximum flux is attained (G. Puppo, M. Semplice, A. T., G. Visconti,2015 [5]) Picture
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Multi-population model
Model with self- and cross-interactions:
dfpjdt
=
np∑h,k=1
Pp,jhk (ρ)fphf
pk︸ ︷︷ ︸
self-interactions
+np∑h=1
nq∑k=1
Qpq,jhk (ρ)fphf
qk︸ ︷︷ ︸
cross-interactions
−(ρC+ρT)fpj (q := ¬p)
In the transition probabilities Pp,jhk , Qpq,jhk the density ρ is replaced by the
fraction of road occupancy s, i.e., the probability of passing is now
P = P (s) = 1− sγ (γ > 0)
Theorem (G. Puppo, M. Semplice, A. T., G. Visconti, 2015 [5])
If nC = nT and `C = `T = 1 the total kinetic distribution functionfj(t) := f
Cj (t) + f
Tj (t) solves the single-population model (6).
sc :=(
12
) 1γ is again a critical value for equilibria. For s = sc the
maximum flux is attained (G. Puppo, M. Semplice, A. T., G. Visconti,2015 [5]) Picture
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Multi-population model
Model with self- and cross-interactions:
dfpjdt
=
np∑h,k=1
Pp,jhk (ρ)fphf
pk︸ ︷︷ ︸
self-interactions
+np∑h=1
nq∑k=1
Qpq,jhk (ρ)fphf
qk︸ ︷︷ ︸
cross-interactions
−(ρC+ρT)fpj (q := ¬p)
In the transition probabilities Pp,jhk , Qpq,jhk the density ρ is replaced by the
fraction of road occupancy s, i.e., the probability of passing is now
P = P (s) = 1− sγ (γ > 0)
Theorem (G. Puppo, M. Semplice, A. T., G. Visconti, 2015 [5])
If nC = nT and `C = `T = 1 the total kinetic distribution functionfj(t) := f
Cj (t) + f
Tj (t) solves the single-population model (6).
sc :=(
12
) 1γ is again a critical value for equilibria. For s = sc the
maximum flux is attained (G. Puppo, M. Semplice, A. T., G. Visconti,2015 [5]) Picture
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
References
[1] L. Fermo and A. Tosin.
A fully-discrete-state kinetic theory approach to modeling vehicular traffic.
SIAM J. Appl. Math., 73(4):1533–1556, 2013.
[2] L. Fermo and A. Tosin.
Fundamental diagrams for kinetic equations of traffic flow.
Discrete Contin. Dyn. Syst. Ser. S, 7(3):449–462, 2014.
[3] L. Fermo and A. Tosin.
A fully-discrete-state kinetic theory approach to traffic flow on road networks.
Math. Models Methods Appl. Sci., 25(3):423–461, 2015.
[4] P. Freguglia and A. Tosin.
Proposal of a risk model for vehicular traffic: A Boltzmann-like kinetic approach.
Preprint: arXiv:1506.05422, 2015.
[5] G. Puppo, M. Semplice, A. Tosin, and G. Visconti.
Fundamental diagrams in traffic flow: the case of heterogeneous kinetic models.
Commun. Math. Sci., 2015.
Accepted (Preprint: arXiv:1411.4988).
[6] G. Puppo, M. Semplice, A. Tosin, and G. Visconti.
Kinetic models for traffic flow resulting in a reduced space of microscopic velocities.
Preprint: arXiv:1507.08961, 2015.
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
Transition probabilities
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Figure: The asymptotic distribution function concentrates on multiples of ∆v Back
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
-
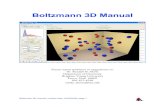
Multi-population model
0 50 100 150 200 2500
1000
2000
3000
4000
5000
6000
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
density ρ / ρmax
flow
rate
: # v
ehic
les
/ lan
e / s
ec.
sensor data
Figure: Left: fundamental diagram from experimental data (Minnesota Departmentof Transportation, 2003). Right: fundamental diagram from the multi-population
model with γ = 0.5 Back
Andrea Tosin A Boltzmann-type kinetic approach to the modeling of vehicular traffic
The spatially homogeneous modelContinuous velocity modelFrom continuous to discrete velocity modelFundamental diagrams and the phase transition
Appendix