
9th Workshop on Planning, Perception and Navigation for ...
10
PPNIV’17 9 th Workshop on Planning, Perception and Navigation for Intelligent Vehicles 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems Full Day Workshop September 24th, Vancouver, Canada Research Director Christian Laugier, INRIA, Emotion project, [email protected], http://emotion.inrialpes.fr/laugier Professor Philippe Martinet, LS2N-CNRS Laboratory, Ecole Centrale de Nantes, [email protected], http://www.irccyn.ec- nantes.fr/~martinet Professor Urbano Nunes, University of Coimbra, [email protected], http://www.isr.uc.pt/~urbano Professor Christoph Stiller, Karlsruher Institut für Technologie [email protected] http://www.mrt.kit.edu/mitarbeiter _stiller.php This workshop is organized in the framework of the IEEE Robotics and Automation's Technical Committee on: Autonomous Ground Vehicles and Intelligent Transportation Systems TC-chairs: P. Martinet, C. Laugier, C. Stiller
Transcript of 9th Workshop on Planning, Perception and Navigation for ...

PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles2017 IEEE/RSJ International Conference on Intelligent Robots and Systems
Full Day Workshop September 24th, Vancouver, Canada
Research Director Christian Laugier, INRIA, Emotion project,
[email protected], http://emotion.inrialpes.fr/laugier
Professor Philippe Martinet, LS2N-CNRS Laboratory, Ecole Centrale de Nantes,
[email protected],http://www.irccyn.ec-nantes.fr/~martinet
Professor Urbano Nunes, University of Coimbra,
[email protected], http://www.isr.uc.pt/~urbano
Professor Christoph Stiller, Karlsruher Institut für Technologie
[email protected] http://www.mrt.kit.edu/mitarbeiter
_stiller.php
This workshop is organized in the framework of the IEEE Robotics and Automation's Technical Committee on: Autonomous Ground Vehicles and Intelligent Transportation Systems
TC-chairs: P. Martinet, C. Laugier, C. Stiller

PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
Session I: Control and planning 9:00Chairman: P. Martinet (LS2N/ECN, France)
Title: Generalized Predictive Planning for Autonomous Vehicles 9:10Keynote speaker: Marcelo H. Ang (NUS, Singapore) 35min + 5min questions
Title: Driving Like a Human: Imitation Learningfor Path Planning using Convolutional Neural Networks 9:50Authors: Eike Rehder, Jannik Quehl and Christoph Stiller 17min + 3min questions
Title: Autonomous Perpendicular And Parallel Parking Using Multi-Sensor Based Control 10:10Authors: David Perez-Morales, Olivier Kermorgant, Salvador Dominguez-Quijada and Philippe Martinet17min + 3min questions

PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
Session II: Segmentation and reconstruction 11:00Chairman: C. Laugier (INRIA, France)
Title: Cooperative Autonomous Driving and Interaction with Vulnerable Road Users 11:00Keynote speaker: Miguel Ángel Sotelo (University of Alcalá, Spain) 35min + 5min questions
Title: A new metric for evaluating semantic segmentation: leveraging global and contour accuracy 11:40Authors: Eduardo Fernandez-Moral, Denis Wolf, Renato Martins and Patrick Rives 17min + 3min questions
Title: Multibody reconstruction of the dynamic scene surrounding a vehicle using a wide baseline and multifocal stereo system 12:00Authors: Laurent Mennillo, Eric Royer , Frederic Mondoty, Johann Mousainy and Michel Dhome(Pascal Institute Clermont-Ferrand) 17min + 3min questions
PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
Session III: Simulation - Legal Issues 13:30Chairman: M. Ang (INRIA, France)
Title: Technical and legal challenges for urban automated driving 13:30Keynote speaker: Seung-Woo Seo (SNU, South Korea) 35min + 5min questions
Title: AutonoVi-Sim: Autonomous Vehicle Simulation Platform with Weather, Sensing, and Traffic control 14:10Authors: Andrew Best, Sahil Narang, Lucas Pasqualin, Daniel Barber and Dinesh Manocha 17min + 3min questions
PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
Session IV: Interactive session (1) (short overviews) 14:30Chairman: P. Martinet (LS2N/ECN, France)Title: Lateral Controllers using Neuro-Fuzzy Systems for Automated Vehicles: A Comparative StudyAuthors: Sarouthan Sriranjan, Ray Lattarulo, Joshue Perez-Rastelli, Javier Ibanez-Guzman, Alberto Pena 5min
Title: Asynchronous Multi-Sensor Fusion for 3D Mapping and LocalizationAuthors: Patrick Geneva, Kevin Eckenhoff, and Guoquan Huang 5min
Title: Towards Cooperative Motion Planning for Automated Vehicles in Mixed TrafficAuthors: Maximilian Naumann and Christoph Stiller 5min
Title: Prediction of Urban Pedestrian Behaviour using Natural Vision and Potential FieldsAuthors: Pavan Vasishta, Dominique Vaufreydaz and Anne Spalanzani 5min
Title: Constant Space Complexity Environment Representation for Vision-based NavigationAuthors: Jeffrey Kane Johnson 5min

PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
Session IV: Interactive session (1) (short overviews) 14:30Chairman: P. Martinet (LS2N/ECN, France)Title: Relocalization under Substantial Appearance Changes using HashingAuthors: Olga Vysotska Cyrill Stachniss 5min
Title: Experimental study of the precision of a multi-map AMCL-based localization systemAuthors: Gaetan Garcia, Salvador Dominguez Quijada, Jean-Marc Blosseville, Arnaud Hamon, Xavier Koreki and Philippe Martinet 5min
Title: PedLearn: Realtime Pedestrian Tracking, Behavior Learning, and Navigation for Autonomous VehiclesAuthors: Aniket Bera and Dinesh Manocha 5min
Title: Safe Navigation in Dynamic, Unknown, Continuous, and Cluttered EnvironmentsAuthors: Mike D'Arcy, Pooyan Fazli and Dan Simon 5min
Session IV: Interactive session (2) (Posters presentation) 15:15-16:00Chairman: P. Martinet (LS2N/ECN, France)

PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
Session V: Perception 16:00Chairman: C. Laugier (INRIA, France)
Title: Where the Intermediate is the Big Step Intralogistics with Safe and Scalable Fleets of Autonomously Operating Vehicles in Shared Spaces 16:00Keynote speaker: Achim Lilienthal (Örebro University, Sweeden) 35min + 5min questions
Title: Fast Image-Based Geometric Change Detection in a 3D Model 16:40Authors: Emanuel Palazzolo, Cyrill Stachniss 17min + 3min questions
Title: Fast Graph-Based Place Recognition 17:00Authors: Mattia G. Gollub, Renaud Dubé, Hannes Sommer, Igor Gilitschenski and Roland Siegwart 17min + 3min questions
PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
0
20
40
60
80
100
120
140
160
180
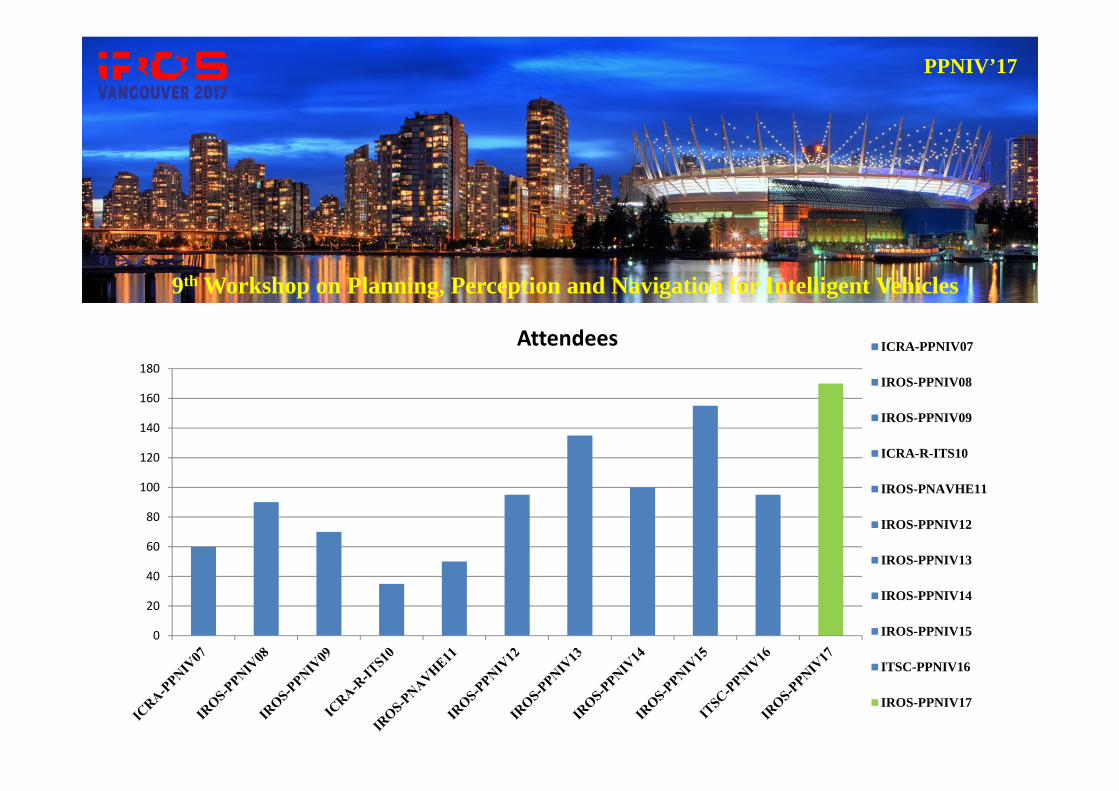
Attendees ICRA-PPNIV07
IROS-PPNIV08
IROS-PPNIV09
ICRA-R-ITS10
IROS-PNAVHE11
IROS-PPNIV12
IROS-PPNIV13
IROS-PPNIV14
IROS-PPNIV15
ITSC-PPNIV16
IROS-PPNIV17
PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
PPNIV’17 Near 170+ attendees Submit and share your work through PPNIV workshops Great Keynotes & Presentations Presentations, papers, and workshop proceedings will be soon on PPNIV17
webpagehttp://ppniv17.irccyn.ec-nantes.fr
Next events: Special issue on Perception and Planning for Autonomous Vehicles in IEEE T-IV or IEEE ITS Magazine (under discussion)
PPNIV-10 (10th edition) will probably be organized at IROS’18 in Madrid in cooperation with IEEE ITS Society
PPNIV’17
9th Workshop on Planning, Perception and Navigation for Intelligent Vehicles
http://www.ieee-ras.org/autonomous-ground-vehicles-and-intelligent-transportation-systems









![Perception-Driven Navigation: Active Visual SLAM for Robotic …robots.engin.umich.edu/publications/akim-2013b.pdf · 2015. 9. 10. · perception by Bajcsy [4], which pointed out](https://static.fdocuments.net/doc/165x107/612d437f1ecc5158694214bd/perception-driven-navigation-active-visual-slam-for-robotic-2015-9-10-perception.jpg)

![ARIANNA: pAth Recognition for Indoor Assisted NavigatioN with Augmented perception · 2019. 11. 12. · possible navigation errors. In [6], vibrational feed-back is given by a special](https://static.fdocuments.net/doc/165x107/60fbfa413a1e3443414d9a33/arianna-path-recognition-for-indoor-assisted-navigation-with-augmented-perception.jpg)




