8.11 ELECTRONIC STABILITY ::-::::=-----~~~~~ PROTE CTION ...€¦ · -ADDITIONAL FEAI una.-'...
11
c:;J\~IV• 11,. ::-:::: =-----~~~~~ - ADDITIONAL FEATURES 8.11 ELECTRONIC STABILITY & PROTE CTION (ESP™) • NOTE: ESP is designed to be a safety h en ancement fi t system. ea ure. ESP is not a full a =:--: . ------ uthority, envelope protection • NOTE: ESP is designed to discourage . ; ~~~;~ ;~; ============ f ,ti . h exceeding the n I 'tin o pe ormmg t e necessary recovery proc d _orma ,light envelope. It is not d . and environments. e ures reqwred due to encount . h es1g~ed or capable ers wit adverse flight conditions Electronic Stability and Protecti on (ESP™) · . . d d bl . is an opuonal f ea t h . . of att1tu e an esta 1shed airspeed par amete rr h· r ure t at is int end ed to di sco urage th d . . rs . 11 1s ea tu re will 1 , f , e excee an ce AGL and th e aut opil ous not engage d. on .0 uncuon when the a ircr aft is above 200 fee l/ Aircraft equipped with Garmin El ec troni c St bl d . S G a I ny an Protection (ESP) ·n d. ProteCllon ys tem; armin ESP" on th e power-u . . wi ispl ay "El ec troni c Sta bilit y a nd . p page . A ircra ft wnhout ESP will not h ave any ESP indication. SKYHAVVK · • Eic·ctromc Stability and Protection System Garmin ESP Cessna .... Cassna 172S ~- System 2501.08 Otetkhstf,1e: ~- NIA @ Oa,~mapLand· 5.16 = SafoT11xi0<1ta '- Expires 15-AUG-2019 •• T1mainOata: - 3.00 'l.l: Ob!.t,1clcOata: - Expires 15-AUG- 2019 -$, tJAvigat10nOata· "- hp11es 18-JUL-2019 -~ t.pt01rectorv: - Expires 15-AUG-2019 FhteChi:lrh Data; -- Expires 18- JUL-20 19 a lfRIVfR charts: - Date: 23-MAY-2019 Press ENT or rightmost sottkey to continue SKYHAVVK All• ap .,,.,lo 11.,~&1• 1>1,;,,,,¢,.,J-, .,.. ,,.,tio., u,c3 '" \J • rt l< , to .. 1 ,~,.,,,ti • ...., ~•(n (Omlil l72) System 2501.08 l'°:. CN! t ~h\l Fde NIA @ 0a1'r:iop l and S.16 tm s ar oT,wDcl:a Expires 15-AUG-2019 .. -,. l en a111 D .it• 3.00 Obst.-.cle O;it;:i - Expires 15-AUG-2019 ~• . tl iMC);ihor Datil Expires 18-JUL- 2019 Apt 01rectorv - Expi1es 15-AUG-2019 § FbteC"IMt~Oat.:i Expires 18-JUL-2019 i1 IFR, VFR rt-,.y1,; - Onte: 23-MAY-2019 Press ENT or rightmost ~oftkey to continue With ESP (reference) Without ESP (reference) Figure 8-53 ESP MFD Power-up Page Examples ESP engages when the aircraft excee ds one or m ore co nditi ons beyo nd the n ormal flight e nvelope (pitch, roll , VN E, or impending stall). Enhanced stability for eac h co nditi on is pro vide d by applying a force Lo th e a ppropri a te control surface to return the aircraft to the normal flight envelop e. This is pe rcei ve d by the pilot as r esistance to co ntrol movement in the undesired direction when th e a ircra ft approaches a steep attitude , high s peed , or impending stall condition. The ESP fea ture will onl y function when th e aircraf L.meets the following co nditi on s: • The aircraft is in flight. The system infers this by speed. If the aircraft GPS ground speed is 0ve r 30 knot s, or True Airspeed is ove r 50 Kn ots. • The aircraft is above 200 fee t AGL ( GPS Altitude), if GPS altitude is available. • The autopilot is not engaged , meaning the pilot is " hand flying ." • The Aircraft is within the maximum engagement limit range defined as Pitch (±50°) and Bank (± 750 ). ESP is automatically enabled above 200 ft AGL using GPS altitud~ . If a Loss of GPS Integrit y (LOI) occurs ESP will default to enabled , however low speed ESP functions will be disabled . lg0-02177-01 RPv R r,;umin G 1000 NXi Pilot's Guide for th e Cessna NAV 111 C C . 4:
Transcript of 8.11 ELECTRONIC STABILITY ::-::::=-----~~~~~ PROTE CTION ...€¦ · -ADDITIONAL FEAI una.-'...

c:;J\~IV• 11,. ::-::::=-----~~~~~-ADDITIONAL FEATURES 8.11 ELECTRONIC STABILITY & PROTE
CTION (ESP™)
• NOTE: ESP is designed to be a safety h
en ancement fi t system. ea ure. ESP is not a full a=:--:.------uthority, envelope protection
• NOTE: ESP is designed to discourage . ;~~~;~;~;============ f ,ti . h exceeding the n I 'tin o pe ormmg t e necessary recovery proc d _orma ,light envelope. It is not d .
and environments. e ures reqwred due to encount . h es1g~ed or capable ers wit adverse flight conditions
Electronic Stability and Protection (ESP™) · . . d d bl . is an opuonal feat h . .
of att1tu e an esta 1shed airspeed paramete rrh· r ure t at is intended to discourage th d . . rs. 11 1s eatu re will 1 , f , e excee ance AGL and the autopilous not engaged. on.0 uncuon when the aircraft is above 200 fee l/
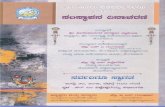
Aircraft equipped with Garmin Electronic St bl d . S G a I ny an Protection (ESP) ·n d. ProteCllon ystem; armin ESP" on the power-u . . wi isplay "Electronic Stability and . p page. Aircraft wnhout ESP will not have any ESP indication.
SKYHAVVK · • Eic·ctromc Stability and Protection System
Garmin ESP
~~-Cessna
.... Cassna 172S ~- System 2501.08
~ Otetkhstf,1e: ~- NIA
@ Oa,~mapLand· 5.16
= SafoT11xi0<1ta '- Expires 15-AUG-2019
• • T1mainOata: - 3.00
'l.l: Ob!.t,1clcOata:
- Expires 15-AUG- 2019
-$, tJAvigat10nOata·
"- hp11es 18-JUL-2019
-~ t.pt01rectorv: - Expires 15-AUG-2019
~ FhteChi:lrh Data; -- Expires 18-JUL-20 19
a lfR IVfR charts: - Date: 23-MAY-2019
Press ENT or rightmost sottkey to continue
SKYHAVVK
All• ap .,,.,lo 11 .,~&1• 1>1 ,;,,,,¢,.,J-, .,.. ,,.,tio., u,c3 '" \ J • rt l< , t o .. 1 ,~,.,,,ti • ....,~•(n
( Omlil l72)
System 2501.08
l'°:. CN!t ~h\ l Fde
NIA
@ 0a1'r:iop l and
S.16 tm s aroT,wDcl:a
Expires 15-AUG-2019
.. -,. l en a111 D.it• 3.00
~ Obst.-.c le O;it;:i
- Expires 15-AUG-2019
~• . tl iMC);ihor Datil
Expires 18-JUL- 2019
i► Apt 01rectorv
- Expi1es 15-AUG-2019
§ FbteC"IMt~Oat.:i
Expires 18-JUL-2019
i1 IFR, VFR rt-,.y1,;
- Onte: 23-MAY-20 19
Press ENT or rightmost ~oftkey to continue
With ESP (reference) Without ESP (reference)
Figure 8-53 ESP MFD Power-up Page Examples
ESP engages when the aircraft exceeds one or more conditions beyond the normal flight envelope (pitch, roll , VNE, or impending stall). Enhanced stability for each condition is provided by applying a force Lo the appropriate control surface to return the aircraft to the normal flight envelope. This is perceived by the pilot as resistance to control movement in the undesired direction when the aircraft approaches a steep attitude, high speed, or impending stall
condition. The ESP fea ture will only function when the aircraf L.meets the following conditions:
• The aircraft is in flight. The system infers this by speed. If the aircraft GPS ground speed is 0ver 30 knots, or
True Airspeed is over 50 Knots. • The aircraft is above 200 fee t AGL ( GPS Altitude), if GPS altitude is available.
• The autopilot is not engaged , meaning the pilot is "hand flying ." • The Aircraft is within the maximum engagement limit range defined as Pitch (±50°) and Bank (±
750).
ESP is automatically enabled above 200 ft AGL using GPS altitud~ . If a Loss of GPS Integrity (LOI) occurs ESP
will default to enabled , however low speed ESP functions will be disabled.
lg0-02177-01 RPv R r,;umin G 1000 NXi Pilot's Guide for the Cessna NAV 111
C C
~ .
4:

ADDITIONAL FEAI una.-'
- ----- ~~ J
h Orroal atlitudeand/or airspeed, the fo rce incre ~~II
. f rtherf rorn t e.n . ases GJ_ 11
A the aircraft deviates u I ernent in the direcnon necessary to return to the p to an est b ~
s e contra rnov . . norm I a hsn maximum) to encourag d . . ns except for high airspeed, once maximum force is r h a attitud e
F r all con itio . eac ed f e an4, or airspee.d range. 0 . agement limit. Above the maximum engagement limit f , orce re \lJ
he maximum eng , . d . h h. h . , orces llla1 11s constant up to t . gagement limit associate wlt 1g airspeed. are no lo
. d There is no maximum en . nger apphe · d for more than ten seconds (cumulaove; not necessarily cons .
h ESP has been engage . ~ n· d. . ecu11ve s W en . I h - ·tot is automatically engaged witn Lue. ight irector;m Level Mode b . . econds) or
20 econd mterva t e autopi . d h n· h . , nnging h a -s . A' 1 "Engaging Autopilot" alert 1s played an t e 1g t director mode annun . . t e a1rcrari (nto level flight. n aura c1at1on Will lnd1c
'LV[ for vertical and lateral modes. . . ate
h f Unexpected autopilot behavior, the pilot can mterrupt ESP by pushing and h Id· In t e event o . . . --- 0 ing eith Co!!trol Y{lltel--&teering (CWS)_ or AutQP~Ll2i.2..c?nnec~ (AP D~SC~ ~ _Dpon releasing the~ DISC switch ESP force will agam be applied, provided aircraft attnude and/or airspeed are within th . AP
' b · dd b · h ' h · l en respectiv engagement limits. ESP can also e overn en y overpowenng t e servos mec amca torque limit. Alth e
Pilot may physically overpower the ESP forces prior to the 'Engaging Autopilot' message, the pilot mu ough t_ne . . . st recogniz
when the autopilot is engaged and not attempt to physically overnde the autopilot. e
If flight maneuvers exceeding the normal ESP envelope are intended, the feature can be disabled ESP b . , , · can e enabled or disabled on the Aux - System Setup Page on the MFD.
Enabling/Disabling ESP:
1) Turn the large FMS Knob to select the Aux Page Group.
2) Turn the small FMS Knob to select the 'Aux - System Setup' Page.
3) If necess~ry, press the SETUP 2 Softkey to display the 'Aux-System Setup 2' Page. If the 'Aux -System Setupl'il already displayed, proceed to step 4.
4) Push the FMS Knob to activate the cursor.
S) Turn the large FMS Knob to place the cursor in the Stability & Protection field.
6) Turn the small FMS Knob to select 'Enabled' or 'Disabled'.
7) Push the FMS Knob to remove the cursor.
ESP is automatically enabled on system power up .
ROLL ENGAGEMENT
Roll _Limit Indicators are displa ed on th . --;,; followmg figure) A ll . y e roll scale at 45° nght and left indicating where ESP will eng g
300 . s ro attnude exceeds 450 ESP . , . will rnove to , as shown in the foll . fi , will engage and the on-side Roll Limit Indicato~ as roll attitude decreases. owmg gure. The Roll Limit Indicator is now showing where ESP will disengage

I GAl-(MfN. I I / Roll Limit Indicator / ESP Engage (4so
20 ),(-
10 ~~~ - - 10
10--- 10
ADDITIONAL FEATURES
Roll Limit Indicator ESP Engage (45°)
Figure 8-54 ESP Roll Engagement Indication (ESP NOT Engaged)
. ESP Engage (45°) Aircraft Roll Attitude = 440
Before ESP Engage
. ESP Disengage (30°) A,rcrah Roll Attitude = 46°
After ESP Engage
Figure 8-55 Roll Increasing to ESP Engagement
Once engaged, ESP force wil l be applied between 30° and 75° , as illustrated in the following figure . The force increases as roll attitude increases and decreases as roll attitude decreases. The applied force is intended to encourage pilot input that returns the airplane to a more normal roll attitude. As roll attitude decreases, ESP
will disengage at 30°.

• Range When Engaged Figure 8-56 ESP Roll Operatmg Roll Decreases}
II s & Decreases as (Force Increases as Ro Increase
h ·tot roll engagement attitude limit of 75° . d ·r h ircraft reaches t e autopl ESP is automatically disengage I t e a (following figure) .
ESP Upper Diseng~ge Limit (~So) Aircraft Roll Attitude = 7 4
I
Figure 8-57 Roll Attitude Autopilot Engagement Limit (ESP Engaged)
PITCH ENGAGEMENT
ESP pitch engagement parameters are set specifically for each aircraft model. The following tables show_s specific engagement angles, maximum opposing force angles and disengagement limits. Once ESP is engaged, 1~
will apply opposing force between approximately 15° and 50° nose-up and between approximately 12° and SO nose-down, as indicated in the following figure . Maximum opposing force is applied between approximately 25° and 50° nose-up and between approximately 22° and 50° nose-down. ESP pitch engagement parameters are set specifically for each aircraft model. Table 8-5 shows specific ESP engagement angles, maximum opposmg force angles, and disengagement limits.

A GARMIN.
ADDITIONAL FEATURES
The opposing fo rce increases or d force is intended to enc ecreases depending on the pitch angle and the direction of pi tch travel. This f . ourage movement . h . . . . . or the aircraft. In t e pnch axis m the direction of the normal pnch attnude range
There are no indications markin th . conditions. g e pnch ESP engage and disengage limits in these nose-up/nose-down
S0°--S0°
45° 45°
40°- -40°
35° - 0. . 35° "' 30°_ w_ 30°
25· - l - 25°
20°- - 20°
1 5° - - 1 5°
10° -t--- 10° 5· 5·
5° 5°
10° -t--- 10°
1 5° 1 5°
20°- - 20°
2 5° - . 2 5°
30°-l- 30° "' 35° -W- 35°
40°- - 40°
45° 45°
50°-- - 50°
Figure 8-58 ESP Pitch Operating Range for the Cessna 172 When Engaged (Force Increases as Pitch Increases & Decreases as Pitch Decreases)
r.~rmin G1000 NXi Pilot's Guide for the Cessna NAV 111 4
m iii

:1: w
~ w > 0
VI 1-z
j
ADDITIONAL FEATURES GARtvi1 ~.
ESP High Pitch Protection unu.ts c-172 C-182 ':~ -$
Angle Opposing Force Begins 16° 19° 18° ! 20° 24° 23° i Max Opposing Force Angle
14° 14° 14° i ESP Disengagement Angle i del Table 8-5 ESP Pitch Protection by Aircraft Mo
ESP Low Pitch Protection Limits J t-• C-172 • f82
I
Angle Opposing Force Begins -16° -17° I -21 °
-220 I
-26° Max Opposing Force Angle -20° I
I -17° ESP Disengagement Angle -14° -12° I I
i
Table 8-6 ESP Pitch Protection by Aircraft Model
HIGH AIRSPEED PROTECTION Exceeding Vne will result in ESP applying force to raise the nose of the aircraft. When the high airspeed
condition is remedied, ESP force is no longer applied.
LOW AIRSPEED PROTECTION
(Model 172) When the aircraft decelerates below 55 KIAS and remains below 55 KIAS fo r..l second, ESP will activate and begin applying nose down force . ESP will stop applying the nose down force once airspeed has increased above 55 KIAS.
(Models 182 and 206) When the stall warning has been active for at least one half second , ESP will activate and begin applying a nose down force . ESP will stop applying the nose down force once the angle of attack has been reduced sufficiently to deactivate the stall warning.

A GARMIN.
OVERSPEED PROTECTION
AUTOMATIC FLIGHT CONTROL SYSTEM
• NOTE: Overspeed protection is not active in ALT, GS or GP modes.
While Pitch Hold , Vertical Speed, Flight Level Change , Vertical Path Tracking, or an altitude capture mode is active, airspeed is monitored by the flight director. Overspeed protection is provided to limit the f1ight director's pitch command in situations where the flight director cannot acquire and maintain the mode reference for the selected vertical mode without exceeding Vne.
When Overspeed Protection is active , the Airspeed Reference appears in a box above the Airspeed Indicator, flashing a amber 'MAXSPD' annunciation . Engine power should be reduced and/or the pitch reference adjusted to slow the aircraft. The annunciation disappears when the overspeed condition is resolved .
MAXSPD
Figure 7-30 Overspeed Annunciation
UNDERSPEED PROTECTION Unders eed Protection is available when the optional Electronic Stability and Protection (ESP) system is
installed :nd the autopilot is on. It is designed to protect the airplane from stall~. When th_e aircraft reaches a · d · d II MINSPD annunciation will appear above the airspeed mdicator.
predetermine alfspee , a ye ow . . . . h ESP · II d the AFCS can detect and protect against underspeed snuauons while the
For airplanes that ave msta e ' · · d bl · d .1
• d It 1·s designed to discourage aircraft operation below mm1mum com man a e airs pee s.
autop1 ot 1s engage .

w a. a. c(
_, w z <(In a.z 0V Q~ :::, <C
394
AUTOMATIC FLIGHT CONTROL SYSTEM
Figure 7-31 Underspeed Annunciation
ALTITUDE-CRITICAL MODES (ALT, GS, GP, GA, FL()
As the aircraft slows, within 5 to 10 seconds from reaching stall warning, an aural "AIRSPEED" alert will sound. If the aircraft decelerates to stall warning, the lateral and venicaJ 0igbL directoT modes wi ll change from aa ive to armed , and the autopilot will provide input causing the aircraft to pitch down and the wings to level.
An aural "AIRSPEED" alert will sound every five seconds and a red "UNDERSPEED PROTECT ACTIVE" annunciation will appear to the right of the vertical speed indicator. The pitch down force will continue until the aircraft reaches a pitch attitude at which IAS equals the IAS at which stall warning turns off, plus two knots.
r 4000
f 4000 - 1
~ I 3~i - 3800 _
1
- 3700 - 2
FEET
29.9211!
Figure 7-32 Underspeed Protect Active Annunciation
Garmin G1000 NXi Pilot's Guide for the Cessna NAV 111 190-02177-0l I

,,,... A
c;ARMIN. AUTOMATIC FLIGHT CONTROL SYSTEM
When airspeed increases (as a result of adding pow I h ) k h . . er t rust to above th IAS . off plus two nots, t e autopilot will cause the aircraft t . h e at which stall warning turns 1
• n· · O pile up um ·, · -The vertical and lateral 1ght d1rec tor modes will c.ban [ 1 recapturing the vertical reference ge. ro m armed to · Th • ·
high as the aircraft climbs back to the desired altitude Th · h· h . acuve. e pnch attitude may be very minimize time spent below the desired altitude. · is ig pnch angle and rate of climb is intended 10
USP Airspeeds -Altitude Critical ~ 172 182 Modes ~- ~ KIAS q ..
All Flap All Flap MINSPD Alert Appears 60 61 Altitude Critical USP Activation 60 Stall Warning
Table 7-7 USP Act1vat1on -Altitude Critical Modes
NON-ALTITUDE CRITICAL MODES (VS, VNAV, PIT, LVL)
206 KIAS
All Flap 61
Stall Warning
When the airspeed trend vector reaches a predetermined airspeed, a single aural "AIRSPEED" will sound , alerting the pilot to the impending underspeed condition. If the aircraft decelerates to an IAS below the minimum commandable autopilot airspeed, a red "UNDERSPEED PROTECT ACTIVE" annunciation will appear to the right of the vertical speed indicator. The vertical flight din:clm mode will change from active to armed , and the autopilot will cause the aircraft to pitch down until reaching a pitch attitude at which IAS equals the minimum commandable autopilot airspeed .
When airspeed increases (as a result of adding power/thrust) to an IAS above the minimum commandable autopilot airspeed, the autopilot will cause the aircraft to pitch up until recapturing the vertical reference . The vertical flight director mode will change from armed to act1ve.
172 182 206 USP Airspeeds - Non Altitude Critical
KIAS KIAS KIAS Modes --
All Flap All Flap All Flap
60 61 61 i
MINSPD Alert Appears ' I
60 61 61 I
Non-Altitude Critical USP Activation I
.. Table 7-8 USP Act1vat1on - Non Altitude Critical Mod es
m vi
l C
QO ~ n< z -"' ~
I I

==~ w-1-> VI er: ► W VI~
VI w
II\ w u 0 z w a.. a.. <
>< w C ~
AUTOMATIC FLIGHT CONTROL SYSTEM 4
GARMIN.
396
7 .6 ABNORMAL OPERATION
SUSPECTED AUTOPILOT MALFUNCTION
• NOTE: Consult the aircraft documentation for the location of circuit breakers as well as specifics that may supplement or amplify this procedure.
If an autopilot failure or trim failure is suspected to have occurred, perform the following steps:
1) Firmly grasp the control wheel.
2) Press and hold the AP DISC Button. The autopilot will disconnect and power is removed from the trim motor. Power is also removed from all primary servo motors and engaged solenoids. Note the visual and aural alerting indicating autopilot disconnect.
3) Retrim the aircraft as needed. Substantial trim adjustment may be needed.
4) Pull the appropriate circuit breaker(s) to electrically isolate the servo and solenoid components.
5) Release the AP DISC Button.
LEVEL MODE Level (LVL) mode also becomes active as a function of Electronic Stability and Protection (ESP) . Refer to the
Additional Features section for a detailed discussion of the optional ESP feature .
When the.normal flight envelope thr.esholds_bave.. been exceeded for more than 50% of the last 20 second~ Level mode is activated. The autopilot will engage and provide input to bring the aircraft back into straight and level flight based on zero degrees roll angle and zero feet per minute vertical speed . An aural engaging autopilot alert sounds and the lateral and vertical flight director annunciations will display "LVL". The AFCS will remain in Level mode until the pilot selects another moae.
10----10
10----10
Command Bars Indicate Level with the Horizon
Figure 7-33 Level Mode Annunciation

>< w 0 ~
AUTOMATIC FLIGHT CONTROL SYSTEM ◄
GARMI N.
388
INTERCEPTING AND FLYING A DME ARC
The AFCS wi ll intercept and track a DME arc that is part of the active flight plan provided that GPS N:1vig:11 iLrn Mock is engaged, CPS is the ac tive navigation source on the CDI, and the DME arc segment is the acti ve flight plan leg. It is important 10 note that automatic navigation of DME arcs is based on GPS. Thus. even if the APR key is pressed and LOC or VOR Approach Mode is armed prior to reaching the Initial Approach Fix (!AF), Approach Mode will not activate until the arc segment is completed.
If the pilot decides to intercept the arc at a location other than the published lAF (i.e . ATC provides vectors to intercept the arc) and subsequently selects Heading Mode or Roll Mode, the AFCS will not automatically interce pt or track the arc unless the pilot acti vates the arc leg of the flight plan and arms GPS Navigation Mode. The AFCS will not interce pt and fly a DME arc before reaching an lAF that defines the beginning of the arc segment. Likewise, if at any poi nt while established on the DME arc the pilot deselects GPS Navigation Mode, the AFCS will no longer track the arc.
GO AROUND (GA) MODE
Pressing the GA Button while in the air activates the flight director in a wings-level , pitch-up attitude , allowing the execution of a missed approach or a go around . Go Around Mode arms Selected Altitude Capture Mode automatically. Attempts to modify the aircraft attitude (i .e., with the NOSE UP/NOSE DN Keys or CWS Button) result in reversion to Pitch and Roll Hold modes.
Go Around Mode r-- Active
,. -. .:. . ALTS
10---10
10---10
Command Bars Indicate Climb
Figure 7-25 Go Around Mode
Garmin G1000 NXi Pilot's Guide for the Cessna NAV 111 1gQ-02177-01 Rev. 1