
8º CONGRESO IBEROAMERICANO DE INGENIERIA ...congreso.pucp.edu.pe/cibim8//pdf/05/05-15.pdf1995)...
11
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 DESARROLLO DE HERRAMIENTAS DE EVALUACIÓN DE PROYECTOS DE DISEÑO M.D.I. Rojas-Coca H. G. *, Dr. López-Parra M.º, Dr. Tang-Xu Y. º, Dr. Santillán-Gutierrez S. º, Dr. Ramírez-Reivich A. *, Dr. Borja-Ramírez V. * *Centro de Diseño Mecánico e Innovación Tecnológica, Laboratorios Alberto Camacho Sánchez, Anexo Facultad de Ingeniería UNAM, Ciudad Universitaria, México D.F. C.P. 04510 , ºUnidad de Desarrollo Tecnológico Querétaro UDETEQ – UNAM Campus Juriquilla, Edificio CFATA. C.P. 76230, Juriquilla Qro. e-mail: [email protected] RESUMEN Contar con una herramienta de evaluación de propuestas de diseño en fase conceptual ha sido una necesidad constante en la relación entre el Centro de Diseño Mecánico e Innovación Tecnológica de la Facultad de Ingeniería de la UNAM (CDMIT) y los empresarios chicos y medianos interesados en participar en proyectos de vinculación. Este artículo trata sobre el desarrollo de una herramienta basada en el modelo de diseño axiomático de Nam Pyo Suh. Los axiomas de independencia de funciones como el de menor contenido de información son la base de discriminación entre un buen o mal diseño. Construir la matriz de diseño [A], para un proyecto real, con el fin de cumplir con {FRs} = [A]{DPs} es una tarea central en el proceso propuesto por Suh. Basados en este modelo, los autores del presente trabajo proponen la utilización del una segunda ecuación [Es] = [A][V]{DPs} donde [A] es binaria; {Es} es un vector de especificaciones de diseño y [V] es una matriz coherente dimensional y paramétricamente. El trabajo reporta el uso de esta ecuación para la evaluación de alternativas conceptuales de diseño original. PALABRAS CLAVE: evaluación, axiomático, especificaciones, diseño.
Transcript of 8º CONGRESO IBEROAMERICANO DE INGENIERIA ...congreso.pucp.edu.pe/cibim8//pdf/05/05-15.pdf1995)...

8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007
DESARROLLO DE HERRAMIENTAS DE EVALUACIÓN DE PROYECTOS DE DISEÑO
M.D.I. Rojas-Coca H. G. *, Dr. López-Parra M.º, Dr. Tang-Xu Y. º, Dr. Santillán-Gutierrez S. º,
Dr. Ramírez-Reivich A. *, Dr. Borja-Ramírez V. *
*Centro de Diseño Mecánico e Innovación Tecnológica, Laboratorios Alberto Camacho Sánchez, Anexo Facultad de Ingeniería UNAM, Ciudad Universitaria, México D.F. C.P. 04510 , ºUnidad de Desarrollo Tecnológico Querétaro
UDETEQ – UNAM Campus Juriquilla, Edificio CFATA. C.P. 76230, Juriquilla Qro. e-mail: [email protected]
RESUMEN
Contar con una herramienta de evaluación de propuestas de diseño en fase conceptual ha sido una necesidad constante en la relación entre el Centro de Diseño Mecánico e Innovación Tecnológica de la Facultad de Ingeniería de la UNAM (CDMIT) y los empresarios chicos y medianos interesados en participar en proyectos de vinculación. Este artículo trata sobre el desarrollo de una herramienta basada en el modelo de diseño axiomático de Nam Pyo Suh. Los axiomas de independencia de funciones como el de menor contenido de información son la base de discriminación entre un buen o mal diseño. Construir la matriz de diseño [A], para un proyecto real, con el fin de cumplir con {FRs} = [A]{DPs} es una tarea central en el proceso propuesto por Suh. Basados en este modelo, los autores del presente trabajo proponen la utilización del una segunda ecuación [Es] = [A][V]{DPs} donde [A] es binaria; {Es} es un vector de especificaciones de diseño y [V] es una matriz coherente dimensional y paramétricamente. El trabajo reporta el uso de esta ecuación para la evaluación de alternativas conceptuales de diseño original. PALABRAS CLAVE: evaluación, axiomático, especificaciones, diseño.

NOMENCLATURA CAs Customers Needs or Attributes – Necesidades del cliente Cs Constraints - Restricciones FRs Fuctional Requirements – Requerimientos Funcionales {FRs} vector de Requerimientos Funcionales [A] matriz de diseño o matriz maestra de diseño DPs Design Parameters – Parámetros de Diseño {DPs} matriz de Parámetros de diseño Es Especificaciones de Diseño {Es} vector Especificaciones de diseño [V] matriz paramétrica INTRODUCCIÓN
Un problema recurrente con el que tropiezan los equipos de diseño al presentar sus propuestas al cliente, institucional o empresario privado chico o mediano, es la tarea de evaluar de manera objetiva la propuesta de solución a un problema de diseño. Si el diseñador no expresa adecuadamente las ventajas y desventajas de cada proposición presentada a la empresa, el empresario urgido es obligado a decidir de acuerdo a su mayor o menor experiencia y sin contar casi siempre con herramientas que le permitan evaluar objetivamente. Este fenómeno es característico de las empresas medianas y pequeñas en el contexto de la economía de países como México.
En el Centro de Diseño Mecánico e Innovación Tecnológica de la Facultad de Ingeniería de la UNAM (CDMIT), se realizan normalmente proyectos con la pequeña y mediana industrias que carecen de las condiciones para mantener un equipo permanente de investigación tecnológica. Se ha enfrentado a diversos problemas de diseño, en especial de diseño original de máquinas y productos en una actividad permanente de más de 30 años. En este marco se hace necesario contar con herramientas de evaluación que faciliten la selección de las propuestas conceptuales de solución que son presentadas al cliente y que permita, desde el punto de vista tecnológico y de igual manera desde el punto de vista del valor, decidir con seguridad la dirección de un proyecto hacia su materialización.
Los autores se apoyan en los preceptos del diseño axiomático que aplicados a un proyecto real, sirven para proponer una herramienta de evaluación de la solución a nivel conceptual al compararla con otras soluciones. Diseño Axiomático
A diferencia de los modelos descriptivos que suelen conceptualizar el proceso de diseño como un procedimiento sistemático a seguir, tan específico que es una particular visión, Evbuoman (Evbuomwan, Sivaloganathan et al. 1995) afirma que entre los modelos prescriptivos del proceso de diseño, se hallan los que se basan en el proceso de diseño mismo y los que se basan en la observación de los atributos del producto. Entre estos últimos se halla el modelo de diseño axiomático de Nam Pyo Suh y el modelo de la función pérdida de Taguchi.
Según Suh, el diseño tiene que ver con la relación entre “qué es lo que necesitamos lograr” y “el cómo elegimos satisfacer la necesidad”. Esta relación es sistematizada por medio del concepto fundamental de “dominio” que establece la líneas de demarcación entre cuatro diferentes conceptos en el mundo del diseño (Suh 2001): el dominio de las necesidades del cliente, el dominio funcional, el dominio físico y el dominio de los procesos. El qué hacer del diseñador deviene en un constante ir y venir de un dominio a otro en un proceso denominado de mapeo. Para diseñar un sistema (Suh 2001) es imperativo deteminar las necesidades del cliente CAs (Customers needs or Attributes) o atributos definidos en el dominio del cliente. Para esto existen muchos métodos para ordenar y gerarquizar las necesidades del cliente relacionándolas con características de ingeniería, estudios de mercado y orientadas al mejoramiento de un producto existente. Luego, en el dominio funcional, las necesidades del cliente son especificadas en términos de los requerimientos funcionales FRs (Functional Requirements) que se establecen como la mínima serie de requerimientos independientes que el diseño debe satisfacer de acuerdo a las restricciones Cs (Constraints).
El siguiente paso es mapear los FRs del dominio funcional hacia el dominio físico. Esto da a lugar a la materialización del diseño en términos de los parámetros de diseño (Design Parameters DPs). Los DPs deben ser elegidos de tal forma que no entran en conflicto con las restricciones. Para un sistema técnico, los FRs son funciones que el sistema debe realizar y los DPs son parámetros físicos, partes o ensambles de partes. Una vez que los DPs han sido establecidos, éstos van a ser mapeados en el dominio de los procesos PVs (Process Variables) para utilizar un proceso existente o crear uno nuevo.
Para Suh, durante los procesos de mapeo, se deben respetar dos axiomas. El Axioma de Independencia determina que un DP específico puede ser ajustado para satisfacer su correspondiente FR sin afectar otro requerimiento funcional. Esto no quiere decir que para cada DP deba corresponder una pieza física separada.
El segundo axioma, el axioma de la Información, establece que la solución que contiene la menor cantidad de información es el mejor diseño. La cantidad de información puede ser medida estadísticamente al comparar dos soluciones que satisfacen de igual manera el axioma de independencia funcional pero cuya probabilidad de suceder es diferente y es una guía para la selección de los DPs adecuados. Si un evento tiene una probabilidad de suceder de 1, luego tiene una cantidad de información igual a 0.
El proceso de mapeo entre dominios es expresado matemáticamente en términos de vectores característicos que definen las metas de diseño y las soluciones de diseño. La serie de requerimientos funcionales que definen metas específicas de diseño constituye un vector {FRs} en el domino funcional. De la misma manera, la serie de parámetros de diseño en el dominio físico constituirá un vector {DPs}. La relación entre estos vectores se escribe como:
{ } [ ]{ }DPsAFRs = (1) donde la matriz [A] es definida como la matriz de diseño que caracteriza al producto de diseño. Luego, la ecuación (1) se escribe como FRi = Aij DPj y se denomina como la ecuación de diseño. Por ejemplo, una matriz de diseño de 3x3 elementos y que relaciona de manera independiente {FRs}con {DPs}, un diseño “no acoplado” (uncoupled), da lugar a la ecuación de diseño que se escribe:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3
2
1
DPDPDP
000000
FRFRFR
xx
x (2)
donde la matriz [A] , diagonal, relaciona cada una de las FRs con su correspondiente DPs de acuerdo al axioma de independencia. Sin embargo, no siempre se reproduce la relación de independencia entre {FRs}y {DPs}. Si para una solución dada, la matriz de diseño [A] es reordenada y toma la forma “triangular” como en la ecuación (3).
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3
2
1
DPDPDP
0000
FRFRFR
xxxx
x (3)
Se habla entonces de que la solución es “desacoplada” (decoupled). Se entiende luego que para resolver un FR intervienen más de un DP. Sin embargo, si la matriz de diseño [A] ni es diagonal, ni es trianguar, la solución es “acoplada” (coupled) y no es una solución viable según los preceptos del diseño axiomático (ecuación 4 ), por lo que deber revisarse la solución hasta lograr una aceptable.
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
3
2
1
3
2
1
DPDPDP
00
0
FRFRFR
xxxx
xx (4)
HERRAMIENTA HEED
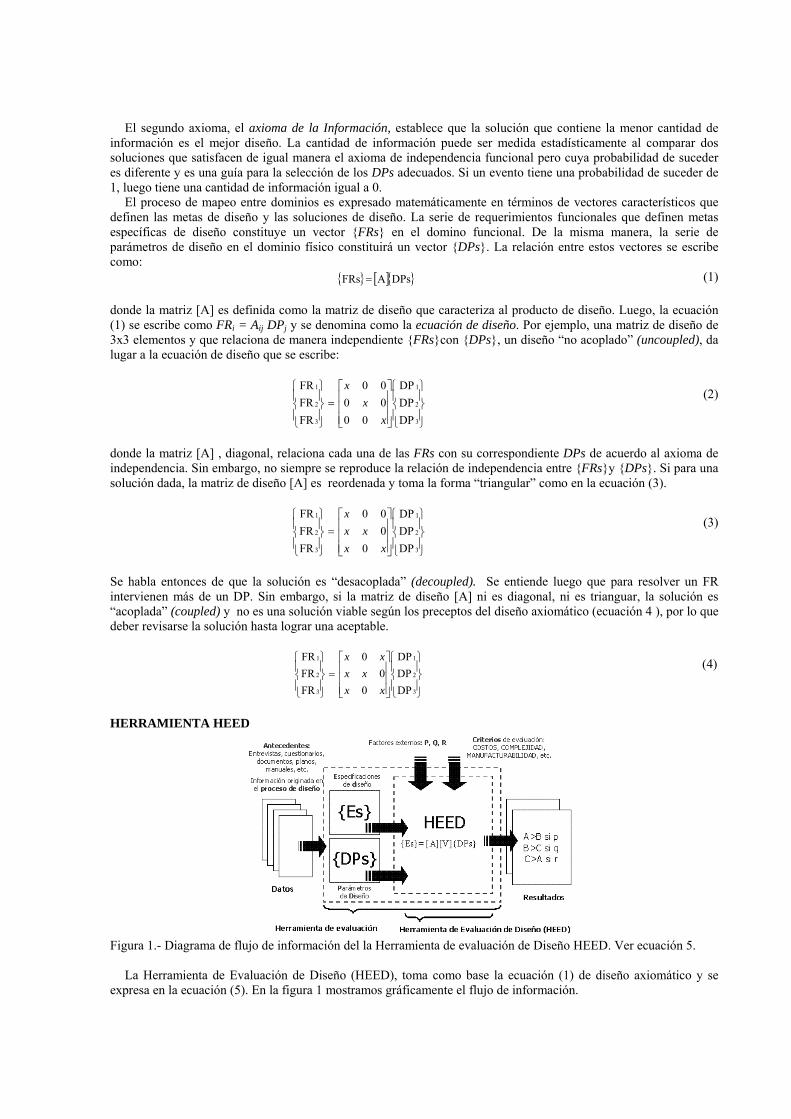
La Herramienta de Evaluación de Diseño (HEED), toma como base la ecuación (1) de diseño axiomático y se
expresa en la ecuación (5). En la figura 1 mostramos gráficamente el flujo de información.
Figura 1.- Diagrama de flujo de información del la Herramienta de evaluación de Diseño HEED. Ver ecuación 5.

{ } [ ][ ]{ }DPsVAEs = (5)
Para su aplicación sobre 2 propuestas de diseño, se siguen los pasos siguientes: 1. Se construye la arquitectura del sistema a diseñarse de acuerdo a los preceptos del diseño axiomático para
encontrar las relaciones de jerarquía y dependencia del subsistema a estudiar de la propuesta 1 (ver figura 2). 2. Se realiza la descomposición en FRs y DPs, “zigzageo” y jerarquización del subsistema hasta llegar al nivel
donde los FRs representen un fenómeno físico y sus correspondientes DPs su magnitud. De esta manera se construye una matriz maestra [A] que refleje la independencia de funciones. Se maneja como una matriz binaria: el elemento Aij toma el valor 1 cuando existe relación entre FRi y la DPj , y el valor 0 cuando no existe relación establecida haciendo [A] una matriz de relación (Chen and Lin 2002). Sólo puede ser diagonal o triangular.
3. Se establece el vector especificaciones de diseño {Es}= {A, B, C, ...}, donde las variables A, B, C, etc., son parámetros de diseño que pueden coincidir o nó con los FRs iniciales.
4. Construir la matriz [V]1 para la propuesta de diseño 1 o sea partir de resolver la igualdad
DPjEiVij
∆∆
= (6)
para los elementos diferentes de cero en [A]. 5. Se construye la matriz [V]2 para la propuesta 2 a comparar identificando el parámetro de la función similar,
utilizando el mismo vector especificaciones de diseño y resolviendo también la ecuación (6) para los elementos diferentes de cero en [A].
6. Se prepara un cuadro de comparación horizontal-vertical para auxiliarnos en el análisis (ver tabla 1).
Para el análisis, evaluación y diagnóstico de un sistema 1 propuesto frente a otra opción o sistema 2 hay dos maneras o “direcciones” de comparación de las variables representadas en las matrices [V]. Horizontal: cuando comparamos los parámetros de diseño correspondientes entre sí de un sistema 1 a otro sistema 2 coincidentes dimensionalmente. Esa comparación resulta en una relación de proporción. Vertical: si relacionamos dimensionalmente entre sí los parámetros de un mismo sistema, encontramos representado en él un fenómeno físico representativo que también comparamos con el resultante del otro sistema.
EL PROYECTO PAP
El desarrollo del proyecto PAP (Plataforma para el Acomodo de Piezas), ver figura 3a, consiste en el diseño y
construcción de un dispositivo que permita la sujeción y posicionamiento preciso de piezas de cuero para que un sistema de visión y medición pueda realizar las operaciones de escaneo e inspección de cada tramo de piel. Las figuras 3b y 3c muestran la arquitectura del sistema PAP y la ubicación del susbistema “módulo de vacío” con las relaciones entre los demás subsistemas que lo constituyen.
Para el diseño axiomático el concepto de dominio es fundamental. En el diagrama de la figura 4, se establecen los FRs con sus correspondientes DPs para el subsistema “módulo de vacío”. Como se observa en la figura 3b, consiste
Figura 2.- . Proceso de “mapeo” de un FR en el dominio funcional a su correspondiente DP en el dominio físico. Luego de conseguido el DP, a un nivel inferior se mapea de regreso los FRs correspondientes. Sólo si estos FRs han sido definidos, se buscan en el domino físico los DPs que los satisfagan. (Suh 2001)).

MÓDULO CONTROL
TANQUEBOMBA
en una cámara cerrada en el interior de la cual se genera una presión de vacío. La cámara sirve como plataforma (mesa) para sujetrar y posicionar cada una de las piezas de cuero. Construcción de la matriz [A] para el sub-subsistema “módulo de vacío”.
A continuación, nos serviremos del proyecto titulado Plataforma para el Acomodo de Piezas (PAP) para ilustrar la aplicación de la ecuación (3) de la herramienta HEED. Este caso de estudio es el diseño de un módulo de mesa de vacío denominado “módulo de vacío” que pueda construir un plano de trabajo de 150 [cm] por 300 [cm] con sólo juntar los módulos suficientes para abarcar el área total de trabajo, manteniendo un superficie perfectamente plana y resistente. Deberá ser capaz de administrar la superficie de succión por áreas por medio de un control independiente para cada una. La figura 5 muestra ambas alternativas de solución. Las funciones a cubrir para el módulo de vacío son: Resistente al trato rudo y al ambiente húmedo. Resumimos las funciones a cubrir para el módulo de vacío:
1. Generar vacío suficiente para sujetar las piezas de cuero. 2. Mantener un plano de trabajo de 75 cm x 75 cm. 3. La mesa de trabajo completa, de 150 cm por 300 cm., está integrada por un arreglo modular (arreglo de n x m
módulos) 4. r áreas (cámaras de vacío) independientes por módulo 5. Resistente a condiciones de ambiente
De estas funciones identificamos el mínimo número de FRs necesarios para definir el subsistema (figura 4): FR1 = Un arreglo de n x m módulos que cubre la superficie total de la mesa generando vacío. FR2 = Módulo rígido que mantienen el plano de la mesa de trabajo. FR3 = r áreas con control de vacío independiente por módulo.
a .-
b.-
c.-
Figura 3.- a) Modelo conceptual de PAP. Figura. b) Modelo conceptual del módulo de vacío. c) Arquitectura del sistema, hardware y la ubicación del subsistema “módulo de vacío” que se desarrolla más adelante.
Figura 4.- Diagrama mostrando la arquitectura del subsistema “módulo de vacío” mostrando el “mapeo” entre el
dominio de los FRs con sus correspondientes DPs.
Las restantes características se asumen de acuerdo a las propiedades físicas de los materiales elegidos. De acuerdo
al Diseño Axiomático hacemos un “mapeo” desde el dominio funcional hacia el dominio físico o de parámetros de diseño; o sea, para cada FR encontramos su DP correspondiente (FRs →DPs). Establecido el DPi se determinan los FRij del siguiente nivel (DPi → FRij). De esta manera similar, también para este nivel sus correspondientes DPij (FRij
→ DPij). Ver el proceco de “mapeo” en la figura 2. DP1 = Presión de vacío suficiente para mantener pegado y en posición vertical un tramo de piel sobre el módulo
de 75 cm x 75 cm superficie. Para una superficie de trabajo de 150 cm x 300 cm, se necesita un arreglo de 4 x 2 módulos (n=4; m=2).
DP2 = Módulos rígidos y/o con una mínima deformación (∆x = 0, ∆y = 0, ∆z ≈ 0) DP3 = Control en cada una de cuatro cámaras por módulo (r = 4). El siguiente paso es construir el siguiente nivel de FRs. Para FR1, la caracterización del módulo de vacío, de
acuerdo a DP1 (DPi → FRij) : FR11 = Generar presión de vacío FR12 = Mover una cantidad de aire FR13 = Determinar un área de succión específica Y sus correspondientes DPs en el dominio físico (FRij →DPij): DP11 = Presión de vacío proporcionada por la bomba [kf/cm2]. DP12 = Gasto de aire que permita el equilibrio del sistema [cm3/seg]. DP13 = Área de succión determinado por el diámetro de orificio y el número de orificios por módulo. Debido a la interdependencia de estos tres parámetros, es necesario determinar de manera experimental sus
proporciones. En la práctica, de las características de la bomba de vacío, presión y gasto, se consigue la dimensión y la cantidad de los orificios de succión. Estos datos se confirman más adelante.
Para FR2, y de acuerdo a DP2, la rigidez y resistencia que debe ofrecer el módulo en la mesa está dada por (DPi →
FRij): FR21 = Deformación permitida en x; ∆x = 0. no hay deformación. FR22 = Deformación permitida en y; ∆y = 0. no hay deformación. FR23 = Deformación permitida en z; ∆z ≈ 0. Este es el valor de deformación observable y puede ser resuelta
eligiendo adecuadamente material y sección transversal. De sus correspondientes DPs en el dominio físico, sólo consideraremos la existencia de la deformación en la
dirección z (FRij →DPij):
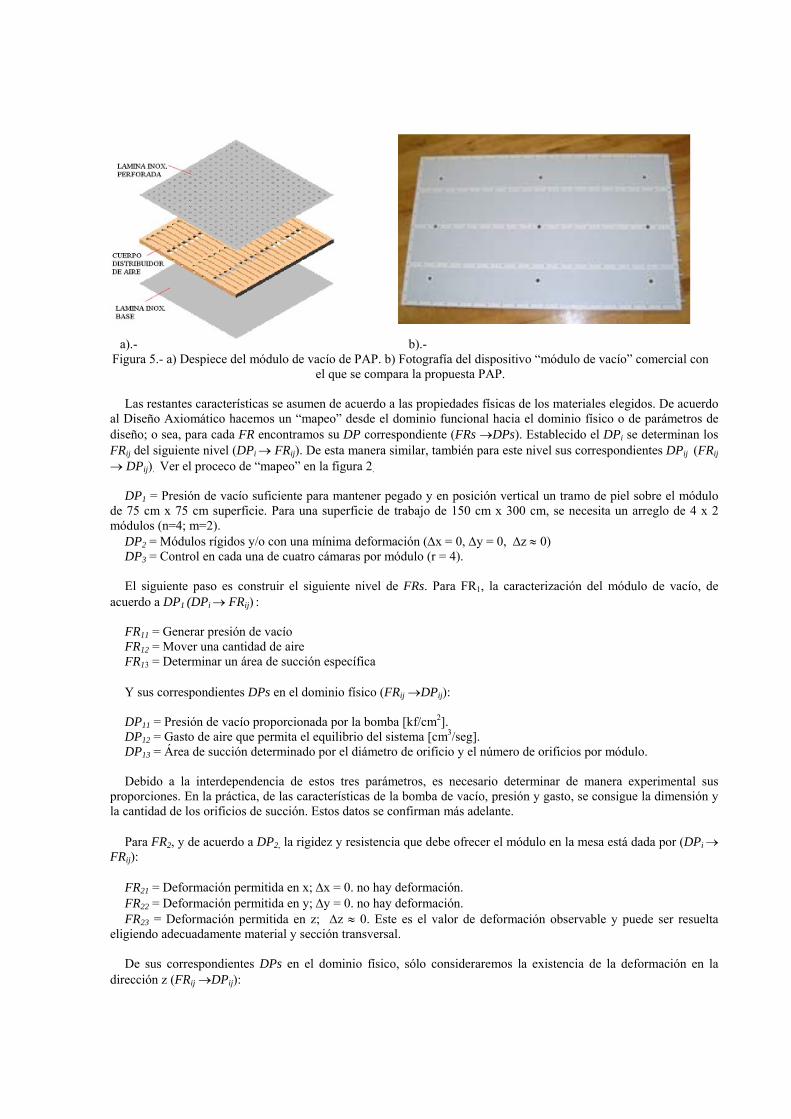
a).-
b).-
Figura 5.- a) Despiece del módulo de vacío de PAP. b) Fotografía del dispositivo “módulo de vacío” comercial con el que se compara la propuesta PAP.

DP23 = Deformación aceptable en z; ∆z < 0.1 cm. Para FR3, de acuerdo a DP3, el concepto de control por áreas trata la “administración “ del área total la mesa de
trabajo. Si ampliamos esta función al siguiente nivel, vemos que para r = 4 , tendremos valores discretos entre 0 y 1 (DPi → FRij).
FR31 = Administración del área total la mesa de trabajo; para r = 4 tendremos valores discretos entre 0 y 1. Para esta función, encontramos (FRij →DPij): DP31 = Valores para el concepto de control, para r = 4; n = 4 y m = 2, el número de cámaras a controlar es de 4 x
4 x 2 = 32. Luego, el valor del parámetro para DP31 es un valor discreto x ⏐x ∈{0, 1/32, 2/32, 3/32, ..... 31/32, 1} El análisis a estos dos niveles y solamente para este subsistema, nos provee de una matriz maestra de relación [A],
ver tabla (1), construída de la siguiente manera:
Por lo que la ecuación de diseño axiómático {FRs} = [A] {DPs} se presenta como:
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
31
21
13
12
11
31
21
13
12
11
DPDPDPDPDP
00000000000000000000
FRFRFRFRFR
xx
xx
x
(7)
Sin embargo, para la ecuación base de la herramienta HEED {Es}=[A][V]{DPs}, los valores de [A] binarios
hacen a [A] = I y los elementos de {FRs} conforman el vector de especificaciones de diseño {Es}, por lo que (5) volvemos a escribir como:
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
31
21
13
12
11
31
21
13
12
11
DPDPDPDPDP
00000000000000000000
1000001000001000001000001
EEEEE
ed
cb
a
(8)
Cada uno de los FRs encontrados describen el último nivel de despligue de la arquitectura del sistema. No
necesariamente coinciden con los FRs planteados como metas para el proyecto de diseño. Por esto les son adjudicados parámetros literales A, B, C, ... , de tal manera que representan los elementos de un vector {Es}={A, B, C, ...} de especificaciones de diseño que deseo alcanzar.
Los DPs, para el diseño axiomático representan la respuesta particular del diseñador para resolver el problema. Es este el parámetro el que es posible de comparar ante otras soluciones. Para una adecuada comparación, la especificación de la función que describe Es debe ser la misma para los sistemas a comparar. Para encontrar los valores a, b, c, etc. de la matriz [V], recurrimos en orden a analizar cada una de las relaciones entre variables. Por ejemplo, para E11 = A para la función área efectiva de succión de PAP. Luego:
1111
1111
DPA
DPEV
∆=
∆∆
== a ; (9)
Tabla 1.- Ordenamiento que permite construir [A].
DP1 DP2 DP3 DP11 DP12 DP13 DP21 DP31
FR11 x 0 0 0 0 FR12 0 x 0 0 0
FR1
FR13 0 0 x 0 0 FR2 FR21 0 0 0 x 0 FR3 FR31 0 0 0 0 x

donde ∆E11 es la variación de la función área efectiva de succión que deseo alcanzar de magnitud A especificada desde el inicio y ∆DP11 es la variación del parámetro de la función área efectiva de succión que estoy logrando alcanzar en la propuesta de diseño.
Para el proyecto PAP, E11 dimensionalmente se expresa en unidades de superficie [L2]. DP11 es el valor del parámetro área de succión definido por el diseñador para el módulo de vacío experimentalmente y multiplicado por el número de módulos = 8:
Para orificios de ∅1/8” [0.3175 cm]; área = 0.0792 [cm2/orificio] 4 cámaras / módulo
9 x 9 = 81 orificios / cámara Área total de trabajo = 8 módulos
Área de succión = módulo
]cámaras[4cámara
][orificios81orificio
]cm[0792.0 2
×× = 25.67 [cm2]/módulo
Área total de succión = 25.67 [cm2]/módulo x 8 módulos = 205.36 [cm2] Área de trabajo / módulo = 75 [cm] x 75 [cm] = 5,625.0 [cm2] / módulo. Área de trabajo total = 5,625.0 [cm2] / módulo x 8 módulos = 45,000.00 [cm2], valor que requeriremos más
adelante. Por lo tanto la igualdad:
][cm 205.36A
DPEV
211
1111 =
∆∆
==a ; (10)
E12 es el gasto de aire necesario para generar el vacío en el sistema. Se expresa en unidades de volumen sobre unidades de tiempo [L3/T]. Directamente hace referencia al gasto máximo de aire aportado por la bomba de vacío. Por lo tanto b para el sistema es:
⎥⎦
⎤⎢⎣
⎡=
∆∆
==
horam10
BDPEV
312
1222 b
(11)
E13 es el presión de vacío máxima a a alcanzar en el sistema. Se refiere a la presión máxima aportada por la bomba de vacío. Dimensionalmente se expresa como [F/ L2]. Por lo tanto c para el sistema es:
]Pa[10 275.8-C
DP∆EV 3
13
1333 ×
=∆
== c (12)
E21 es el deformación máxima permitida para esta pieza en el el sistema. Se refiere a la flecha de deflexión
máxima del módulo de vacío sobre la dirección z. Dimensionalmente se expresa como unidades de longitud [L]. Por lo tanto d para el sistema es:
]m[0.0001-D
DP∆EV
21
2144 =
∆== d (13)
E31 es el parámetro que determina el tipo de control. Este parámetro fluctúa en valores discretos de 1/32 avos en
el espacio de 0 a 1. Es adimensional. Por lo tanto e para el sistema es:
⎭⎬⎫
⎩⎨⎧∈∀=
∆== 1,32
31,,322,32
1,0EDP∆EV
31
3155 K
uuu
e (14)
De la misma manera, los parámetros con los que describimos las cualidades del producto comercial (figura 5b)
con el que estamos comparando, y correspondientes a cada uno de los requerimientos funcionales descritos para PAP se adquieren de la misma manera.
El área efectiva de succión para cada módulo comercial E11 en unidades de superficie [L2]. DP11, área de succión es calculado a partir de los proporcionados por el fabricante.
Para orificios de ∅ 0.40 [cm]; área = 0.1257 [cm2/orificio] Para 1 cámaras / módulo se calculan 13,776 orificios para una cámara / módulo Area succión =
módulo]cámara[1
cámara][orificios776,13
orificio]cm[1257.0 2
×× = 1,731.14 [cm2]/módulo
Area total de succión = 1,731.14 [cm2]/módulo x 10 módulo = 17,311.4 [cm2] Area de trabajo / módulo = 23 [pulg][2.54cm/pulg] x 39 [pulg] [2.54 cm/pulg] = 5,787.1 [cm2] / módulo. Área total de trabajo = 5,787.1 [cm2] / módulo x 10 módulos = 57,871.0 [cm2] ; valor que necesitaremos más
adelante. Luego, los valores para la matriz [V]COM correspondiente a la opción comercial son:

][cm 5,787.1A
DPEV 2
11
1111 =
∆∆
==a
⎥⎦
⎤⎢⎣
⎡=
∆∆
==
horam320
BDPEV b
312
1222
]Pa[10 275.8-C
DP∆EVc 3
13
1333 ×
=∆
==
]m[0.0001-D
DP∆E
V d21
2144 =
∆== suponemos que sí resiste los requerimientos de esfuerzos a la flexión;
{ }1,0EDP∆E
Ve31
3155 ∈∀=
∆== uu
u para el sistema.
De esta manera podemos completar los valores para construir y comparar las dos matrices que corresponden a la propuesta de diseño [VPAP] frente a la propuesta equivalente comercial.
[ ]⎭⎬⎫
⎩⎨⎧∈∀
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
×= 1,32
31,,322,32
1,0;
E0000
00.0001
D000
0010275.8-
C00
00010B
0
0000205.36
A
V3 K
uu
u
PAP
(15)
La matriz a derivada del análisis de las variables de la opción comercial [VCOM] es:
[ ] { }1,0;
E0000
00.0001
D000
001033.0-
C00
000320B
0
000017,311.4
A
V3
∈∀
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
×= uu
u
COM
(16)
Análisis de los datos e información mostrada en las matrices [V]
Con ayuda de los principios del diseño axiomático, los requerimientos funcionales {FRs} que expresan una función a realizar, son parametrizados por {Es}. Aunque el proceso de diseño de la propuesta PAP ha construído la arquitectura del sistema desde el inicio, la comparación de las características de un subsistema con otro dispositivo externo equivalente, sólo requiere de la identificación de las funciones que van a ser estudiadas. Quiere decir que primero se identifican las funciones, se las asocia a una especificación de diseño del subsistema que se va a estudiar y se construye desde ese punto los subniveles necesarios siguiendo los axiomas. Este caso de estudio maneja una matriz [A] diagonal porque la solución de diseño responde adecuadamente al axioma de independencia de funciones.
Un cuadro comparativo de los DPs correspondientes a cada especificación inicial nos permite observar las dos maneras o “direcciones” de comparación de las variables representadas en las matrices [V].Ver tabla 2.
Horizontal: cuando comparamos los parámetros de diseño correspondientes entre sí de un sistema 1 a otro sistema 2 coincidentes dimensionalmente. Esa comparación resulta en una relación de proporción.
Vertical: si relacionamos dimensionalmente entre sí los parámetros de un mismo sistema, encontramos representado en él un fenómeno físico representativo que también comparamos con el resultante del otro sistema.

RESULTADOS
De la comparación “horizontal” tenemos que: Para la especificación A.- el área de succión de PAP es 84.4 veces menor que el comercial: agujeros más chicos.
El área de trabajo de PAP es el 0.77 = 1/1.29 del área de trabajo de módulos comerciales. Para B.- el gasto de aire de PAP es 1/32 del gasto necesario para el sistema comercial Para C.- La presión de vacío de PAP es 8.3 veces mayor que el del sistema comercial (8.3 = 1/0.12). Para D.- consideramos que ambos son suficientemente sólidos. Para E.- El concepto de “control” por sí solo nos muestra que podemos administrar la superficie en 32 cuadros.
Pero combinada con otras variables se observan otras características adicionales. De la comparación vertical: Para B/A.- dimensionalmente expresa la velocidad del aire al ingesar por los orificios. PAP succiona el aire a
menor velocidad que su símil comercial. Reduciendo el área de succión como en 18 de 32 partes, las que se acomoden a la geometría de la piel, la velocidad de succión del aire aumenta a casi el doble (B/A)/E.
El dato más interesante es la fuerza con que se succiona. Para superficies más o menos semejantes, no hay una una fuerza más o menos similar. Pero, imaginando un tramo de 10 x 10 [cm2] de piel de 2,2 [mm], con un peso de 21.6 [gr] ¿Cuánta fuerza aplica PAP?
0046.0][000,45][36.205.Re 2
2
===cmcm
trabAreasuccAreasuccióndelación (17)
0046.0][100][)100(][
][275800F 222
2
2 ×××= cmcm
mm
N = 1.2743[Kgr f] a los 0.0216 [Kgr f] necesarios.
¿Cuánta fuerza aplica el dispositivo comercial?
2991.0][0.871,57][4.311,17.Re 2
2
===cmcm
trabAreasuccAreasuccióndelación (18)
2991.0][100][)100(][
][0.3300F 222
2
2 ×××= cmcm
mm
N
F = 9.8703[Kgr f] 0.0216 [Kgr f], que es demasiada fuerza aplicada para nuestros propósitos.
Estos criterios mas otros condujeron a poder concluir que PAP, costando un 25% del sistema comercial, ofrece un
servicio a la medida y a la postre un servicio con menor consumo de energía. CONCLUSIONES HASTA ESTE PUNTO DE AVANCE DE LA INVESTIGACIÓN Para la evaluación de un sistema técnico a nivel conceptual comparándolo contra otro sistema técnico similar o
producto comercial, no es necesario elaborar para éste la totalidad de la “arquitectura del sistema”. Primero deben identificarse las funciones a comparar bajo el criterio de que son estos los requerimientos funcionales, funciones a las que asociamos un vector requerimientos de diseño {Es} para este subsistema a trabajar. A partir de este punto, se construye la “arquitectura del subsistema” hasta llegar a su máximo despligue siguiendo los preceptos del diseño axiomático.
Es ESPECIFICACIÓN FRs FUNCION DIMENSION UNIDADES SISTEMA 1 SISTEMA 2A área de succión [L2] [cm2] 205.36 17311.40 1: 84.30
área de trabajo [L2] [cm2] 45000.00 57871.00 1: 1.29B gasto de aire [L3/T] [m3/h] 10.00 320.00 1: 32.00C presión de vacío [F/L2] [N/m2]=[Pa] -275800.00 -33000.00 1: 0.12D deflexión [L] [m] 0.00 0.00 1: 1.00E control 1 a 32 adim 18 0.56 1.00 1: 1.77
B/A velocidad aire [M/T] [m/seg] 13.53 5.13 1: 0.38(B/A)/E velocidad aire [M/T] [m/seg] 24.01 5.13 1: 0.21
A*C fuerza de succión [F] [N] -5663.83 -57127.62 1: 10.09
RAZON S1 a S2Tabla 2.- Correspondencia y comparación de especificaciones Es y DPs y relaciones dimensionales
Para este caso de estudio, se ha tratado de mantener la independencia de funciones y manejar una matriz diagonal [A] para efectos de simplificar el ejercicio. El trabajo a futuro deberá considerar la mayor complejidad al manejar una matriz [A] triangular que generalice los casos.
Al intervenir una variable adimensional como la expresada en “control” en la especificación {E}, se abre la posibilidad de incluir una variable adimensional que relacione un concepto “no neutro” y que califique uno o varios parámetros con un factor que fluctúe, ya sea con valores entre cero y uno, o en otro rango previamente determinado.
Se considera un trabajo a futuro la tarea de identificar las semejanzas y diferencias del cuadro comparativo de datos con los originados por las diferentes metodologías de diseño.
Aún no se ha ideado una manera formal de utilizar el arreglo matricial de [V] que recurriendo al álgebra de matrices u otras operaciones facilite construir un “marco” de comparación y presentación de las conclusiones.
REFERENCIAS: Chen, L.-C. and L. Lin (2002). "Optimization of Product Configuration Design Using Functional Requirements
and Constraints." Research in Engineering Design: 167 - 182.
Evbuomwan, N. F. O., S. Sivaloganathan, et al. (1995). "A survey of philosophies, models, methods and systems." Journal of Engineering Manufacture Part B: 301-320.
Suh, N. P. (1990). The Principles of Design. New York. Cap. 6.
Suh, N. P. (2001). Axiomatic Design, Advances and Applications. New York. Cap. 1.
AGRADECIMIENTOS: Los autores del presente trabajo desean agradecer el apoyo económico, técnico y logístico de las siguientes
organizaciones: CONACYT Consejo Nacional de Ciencia y Tecnología de México (Programa FOMIX-Guanajuato), Grupo FLEXI, León Gto., UDETEQ y CDMIT de la Facultad de Ingeniería de la UNAM.


















