6/22/2015©Zachary Wartell 2D Transformations Revision 1.2 Copyright Zachary Wartell, University of...
32
03/25/22 ©Zachary Wartell 2D Transformations Revision 1.2 Copyright Zachary Wartell, University of North Carolina All Rights Reserved Textbook: Chapter 5
-
date post
21-Dec-2015 -
Category
Documents
-
view
221 -
download
0
Transcript of 6/22/2015©Zachary Wartell 2D Transformations Revision 1.2 Copyright Zachary Wartell, University of...

041823copyZachary Wartell
2D Transformations
Revision 12Copyright Zachary Wartell University of North Carolina
All Rights Reserved
TextbookChapter 5
041823copyZachary Wartell
Matrices Change of Coordinates vs Geometric Transform
A
[Mi]A
Matrices can represent a change of coordinates denoted
MAlarrB
Matrices are also useful for representing transformations of geometry denoted
[Mi]A [Mj]A [Mk]A
[Mj]A
041823copyZachary Wartell
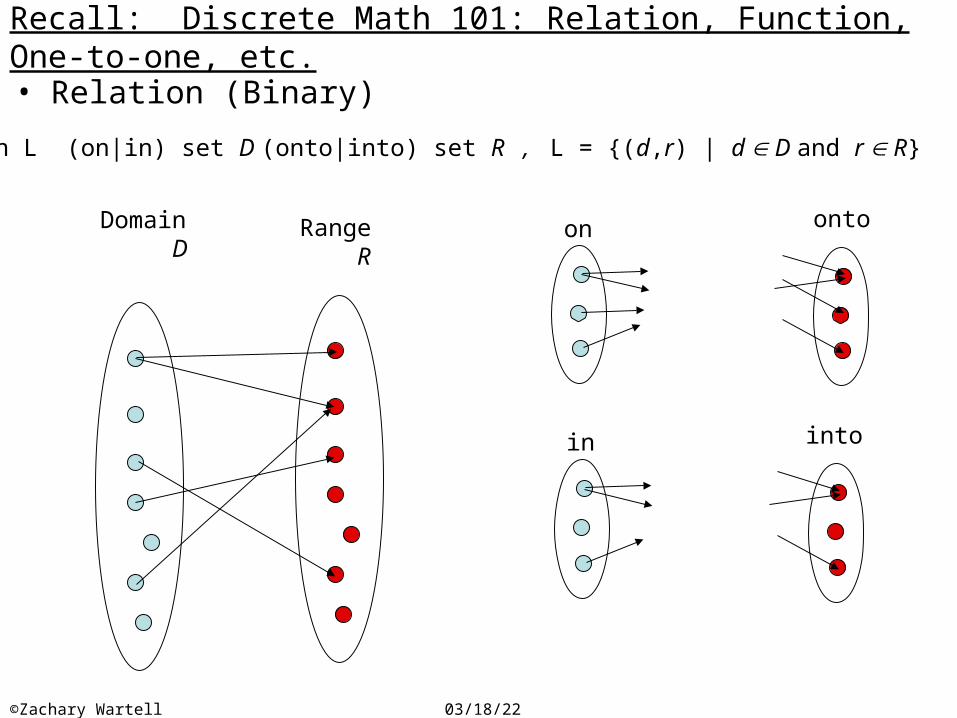
Recall Discrete Math 101 Relation Function One-to-one etcbull Relation (Binary)
Domain D
Range R
relation L (on|in) set D (onto|into) set R L = (dr) | d D and r R
onto
in
on
into
041823copyZachary Wartell
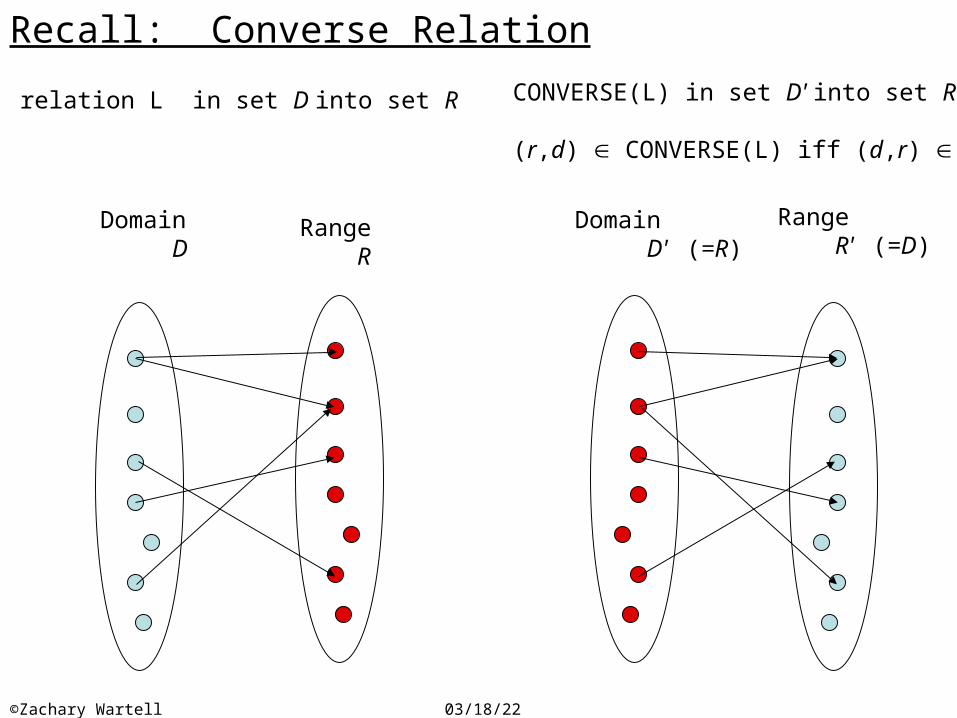
Recall Converse Relation
Domain D
Range R
relation L in set D into set R
Domain D (=R)
Range R (=D)
CONVERSE(L) in set D into set R
(rd) CONVERSE(L) iff (dr) L
041823copyZachary Wartell
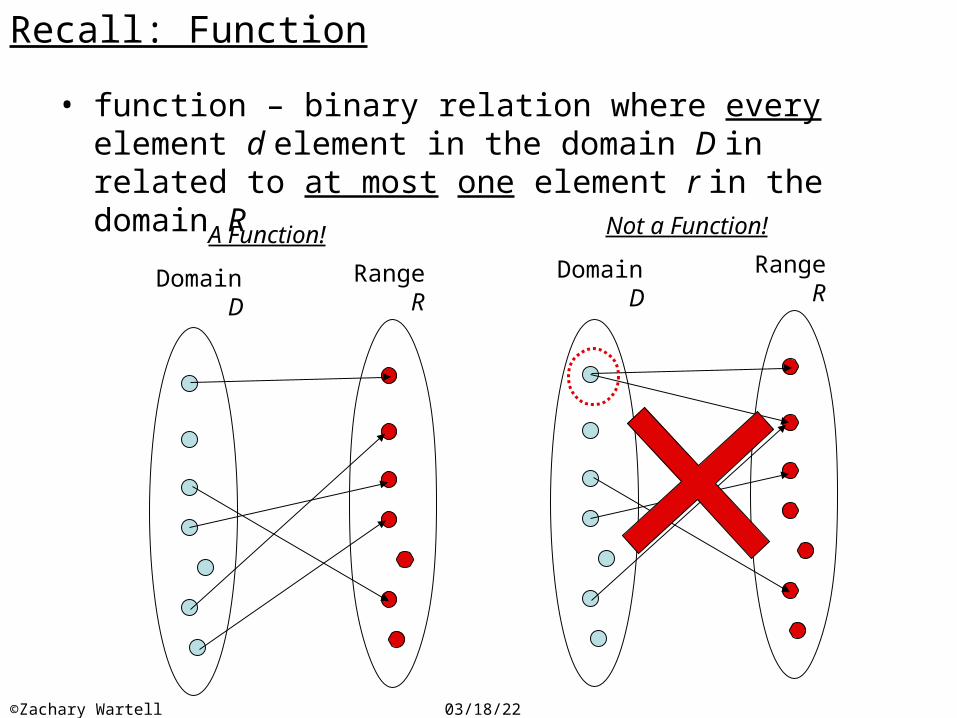
Recall Function
bull function ndash binary relation where every element d element in the domain D in related to at most one element r in the domain R
Domain D
Range R
Not a Function
Domain D
Range R
A Function
041823copyZachary Wartell
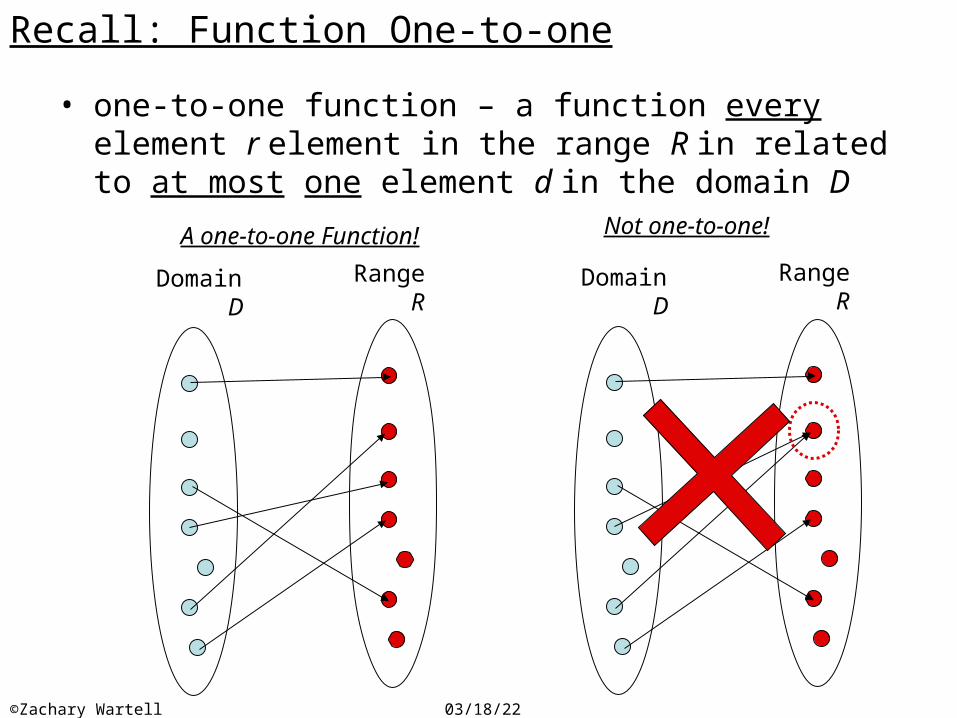
Recall Function One-to-one
bull one-to-one function ndash a function every element r element in the range R in related to at most one element d in the domain D
Not one-to-one
Domain D
Range R
A one-to-one Function
Domain D
Range R
041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Matrices Change of Coordinates vs Geometric Transform
A
[Mi]A
Matrices can represent a change of coordinates denoted
MAlarrB
Matrices are also useful for representing transformations of geometry denoted
[Mi]A [Mj]A [Mk]A
[Mj]A
041823copyZachary Wartell
Recall Discrete Math 101 Relation Function One-to-one etcbull Relation (Binary)
Domain D
Range R
relation L (on|in) set D (onto|into) set R L = (dr) | d D and r R
onto
in
on
into
041823copyZachary Wartell
Recall Converse Relation
Domain D
Range R
relation L in set D into set R
Domain D (=R)
Range R (=D)
CONVERSE(L) in set D into set R
(rd) CONVERSE(L) iff (dr) L
041823copyZachary Wartell
Recall Function
bull function ndash binary relation where every element d element in the domain D in related to at most one element r in the domain R
Domain D
Range R
Not a Function
Domain D
Range R
A Function
041823copyZachary Wartell
Recall Function One-to-one
bull one-to-one function ndash a function every element r element in the range R in related to at most one element d in the domain D
Not one-to-one
Domain D
Range R
A one-to-one Function
Domain D
Range R
041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-
041823copyZachary Wartell
Recall Discrete Math 101 Relation Function One-to-one etcbull Relation (Binary)
Domain D
Range R
relation L (on|in) set D (onto|into) set R L = (dr) | d D and r R
onto
in
on
into
041823copyZachary Wartell
Recall Converse Relation
Domain D
Range R
relation L in set D into set R
Domain D (=R)
Range R (=D)
CONVERSE(L) in set D into set R
(rd) CONVERSE(L) iff (dr) L
041823copyZachary Wartell
Recall Function
bull function ndash binary relation where every element d element in the domain D in related to at most one element r in the domain R
Domain D
Range R
Not a Function
Domain D
Range R
A Function
041823copyZachary Wartell
Recall Function One-to-one
bull one-to-one function ndash a function every element r element in the range R in related to at most one element d in the domain D
Not one-to-one
Domain D
Range R
A one-to-one Function
Domain D
Range R
041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-
041823copyZachary Wartell
Recall Converse Relation
Domain D
Range R
relation L in set D into set R
Domain D (=R)
Range R (=D)
CONVERSE(L) in set D into set R
(rd) CONVERSE(L) iff (dr) L
041823copyZachary Wartell
Recall Function
bull function ndash binary relation where every element d element in the domain D in related to at most one element r in the domain R
Domain D
Range R
Not a Function
Domain D
Range R
A Function
041823copyZachary Wartell
Recall Function One-to-one
bull one-to-one function ndash a function every element r element in the range R in related to at most one element d in the domain D
Not one-to-one
Domain D
Range R
A one-to-one Function
Domain D
Range R
041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-
041823copyZachary Wartell
Recall Function
bull function ndash binary relation where every element d element in the domain D in related to at most one element r in the domain R
Domain D
Range R
Not a Function
Domain D
Range R
A Function
041823copyZachary Wartell
Recall Function One-to-one
bull one-to-one function ndash a function every element r element in the range R in related to at most one element d in the domain D
Not one-to-one
Domain D
Range R
A one-to-one Function
Domain D
Range R
041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-
041823copyZachary Wartell
Recall Function One-to-one
bull one-to-one function ndash a function every element r element in the range R in related to at most one element d in the domain D
Not one-to-one
Domain D
Range R
A one-to-one Function
Domain D
Range R
041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Recall Inverse of Functionbull a 1-to-1 function F has a inverse function F-1
ndash Take F build CONVERSE(F) Since F is 1-to-1 CONVERSE(F) is also function
CONVERSE(F) is a function syn the lsquoinverse existsrsquo F-1 exists F is lsquoinvertiblersquo F is non-singular
Domain D
Range R
A one-to-one Function
D R
041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
2D Transform
bull 2D function that maps points (xy) to points (xy)bull Example
F (xy) (xy+x2)
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-
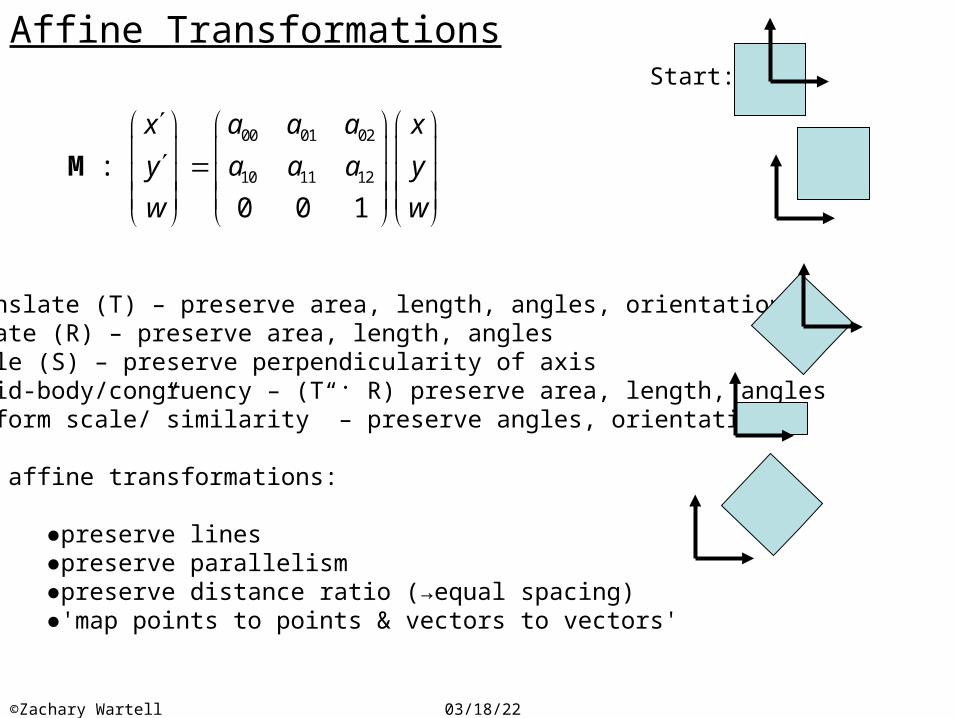
041823copyZachary Wartell
Affine Transformations
00 01 02
10 11 12
0 0 1
x a a a x
y a a a y
w w
M
translate (T) ndash preserve area length angles orientationrotate (R) ndash preserve area length anglesscale (S) ndash preserve perpendicularity of axisrigid-bodycongruency ndash (T R) preserve area length anglesuniform scalerdquosimilarityrdquo ndash preserve angles orientation
All affine transformations
preserve linespreserve parallelismpreserve distance ratio (rarrequal spacing)map points to points amp vectors to vectors
Start
041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Preserve Lines
l
l
M transforming entire grid
l p = p0 + t (p1-p0 ) rarr l M(p) =M(p0) + t (M(p1)-M(p0))
p0
p1
p
p0
p
p1
041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Parallelism
la lb
la
lb
M transforming entire grid
la || lb rarr M(la) || M(lb) = la || lb
041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Distance Ratios
l
l
M transforming entire grid
abbc = abbc
a
b
c
a
b c
041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Translation
bull add offset vector t to every point
t
(xy) (x+txy+ty)
1 0
0 1
0 0 1
x
y
x t x
y t y
w w
bull matrix form
041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Rotate
bull specify pivot point and angle
bull how to rotate (xy) about P through θ ndash algebra assume P is origin
P
θ
Observesin (Φ + θ) = yr cos (Φ + θ) =
xrsin Φ = yr cos Φ = xr
x-axis
(xy)
(xrsquoyrsquo)
Φ
θr
(00)
y-axis
Use double angle formulas
cos (Φ + θ) = cos Φ cosθ - sin Φ sinθ
sin (Φ + θ) = sin Φ cosθ + cos Φ sinθ
Substitute xr = (xr)cos θ - (yr)sin θ
Therefore x = x cos θ - y sin θ
Similarly y = x sin θ + ycos θ
041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Rotate about Origin
cos sin 0
sin cos 0
0 0 1
x x
y y
w w
bull matrix form
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-
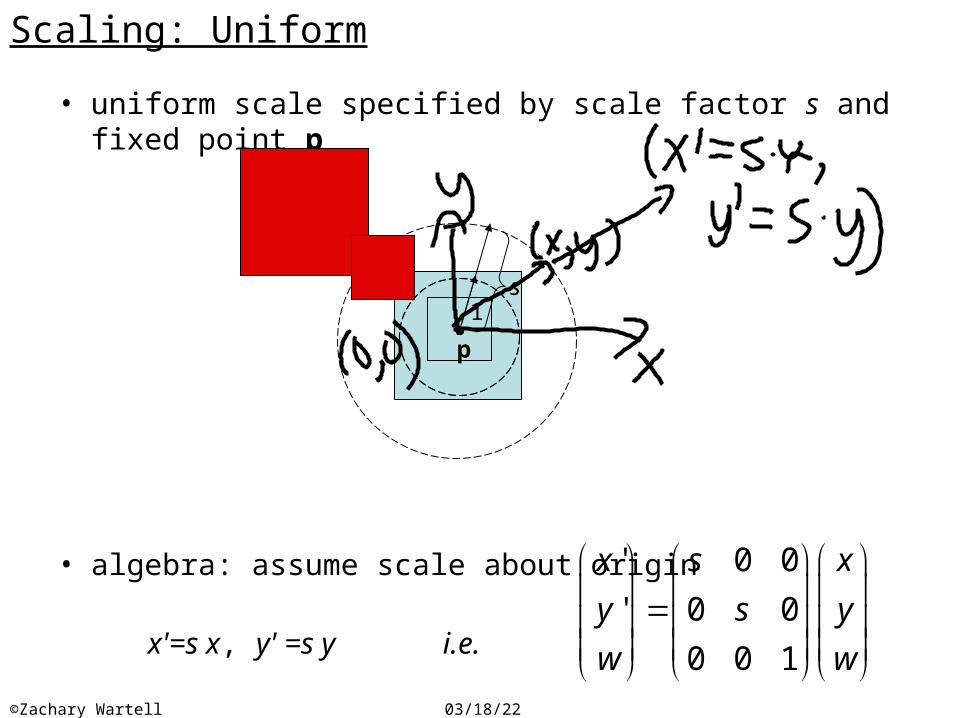
041823copyZachary Wartell
bull uniform scale specified by scale factor s and fixed point p
bull algebra assume scale about origin
x=s x y =s y ie
Scaling Uniform
1s
p
0 0
0 0
0 0 1
x s x
y s y
w w
041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
bull specify two scale factors sx and sy and two perpendicular fixed lines
bull algebra assume scale along x and y axis
Scale Differential
0 0
0 0
0 0 1
x
y
x s x
y s y
w w
sxp
sy
B
041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Inverse Transforms
bull translate
bull rotate
bull scale
1
1 0
0 1
0 0 1
x
y
t
t
T
cos sin 0 cos( ) sin( ) 0
sin cos 0 sin( ) cos( ) 0
0 0 1 0 0 1
1R
1
10 0
10 0
0 0 1
x
y
s
s
S
041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Shear (along XY axis)
1 0
0 1 0
0 0 1
xysh
1 0 0
1 0
0 0 1yxsh
Y Shear (in terms of X)
X Shear (in terms of Y)
041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Reflections
1 0 0
0 1 0
0 0 1
1 0 0
0 1 0
0 0 1
X Axis Reflection Y Axis Reflection
1 0 0
0 1 0
0 0 1
Origin Reflection Reflection on y=x
0 1 0
1 0 0
0 0 1
041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Composing Transformations
bull Examples
2 1 1 2
2 1 1 2
1 0 1 0 1 0
0 1 0 1 0 1
0 0 1 0 0 1 0 0 1
x x x x
y y y y
t t t t
t t t t
2 1 1 2
2 1 1 2
0 0 0 0 0 0
0 0 0 0 0 0
0 0 1 0 0 1 0 0 1
x x x x
y y y y
s s s s
s s s s
2 2 1 1 2 1 2 1 2 1 2 1
2 2 1 1 2 1 2 1 2 1 2 1
2 1 2 1
cos sin 0 cos sin 0 cos cos sin sin cos ( sin ) sin cos 0
sin cos 0 sin cos 0 sin cos cos sin sin ( sin ) cos cos 0
0 0 1 0 0 1 0 0 1
cos sin 0
sin
2 1 2 1cos 0
0 0 1
041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Matrix Composition Non-Communitive
cos sin 0 1 0
sin cos 0 0 1
0 0 1 0 0 1
x
y
t
t
bull Matrix multiplication non-communitive
bull Example
1 0 cos sin 0
0 1 sin cos 0
0 0 1 0 0 1
x
y
t
t
1
2
2
1
041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
How do I rotate about arbitrary point p
B[MRot(θ)] B
(33)Bv
A
MRot (θp)
p()Bv
(33)
B
v
[MRot(θ)]A=[MRot(θp)]B
p
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
( )
( )
( )
1 1
1
1
1
Rot
Rot
Rot
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
( )
( )
1
1 0 cos sin 0 1 0
0 1 sin cos 0 0 1
0 0 1 0 0 1 0 0 1 1
1 0 cos sin cos
0 1
0 0 1
Rot
Rot
x x
y y
x x
y
x
y
p p x
p p y
p p
p
M
M M M A B B
B A A B BA
B
B
sin
sin cos sin cos
0 0 1 1
cos sin cos sin
sin cos sin cos
0 0 1 1
y
x y
x y x
x y y
p x
p p y
p p p x
p p p y
B
B
B
B
041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Generally If I know v in B and M in A then compute v in in B hellip
(33)B
B
A
v
[M]A
(33)B
B
A
v
[M]A
1 1
1
1
1
x x
y y
x
y
x
y
x
y
M
M M M
M M
M
A BB B
B B A A B BA
A
B A AA
A
B A A
B
B
Note matrices used as both a geometric transformation [M] A) and a change of coordinates (MBlarrA amp MAlarrB)
041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Two ways to visualize____________________ M M MB A A BA
[MRot(θ)]A
p
B
(33)Bv
A ()Bv
[MRot(θ)]A
p
[MRot(θ)]A
pp
B
(33)Bv (33)Bv
A A ()Bv ()Bv ()Bv
bull Measurement visualization ndash measure coordinates in A
ndash perform [M]A
ndash measure coordinates in B
bull Superimpose visualization
B
(33)Bv
A
B
(33)Bv (33)Bv
A A
B
(-11)v
A
A B
(-11)v (-11)v
A A
A A
B(
)
v
A
A B(
)
v(
)
v
A A
A A
(
)
v
B
A (
)
v(
)
v
B
A
B
A A
1) 2)
3) 4)
041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Scale about arbitrary point
sxp
sy
B
A
Scale
Scale
1 1
1 0 0 0 1 0
0 1 0 0 0 1
0 0 1 0 0 1 0 0 1 1
0 (1 )
0 (1 )
0 0 1 1
x x x
y y y
x x x
y y y
x x
y y
p s p x
p s p y
s p s x
s p s y
M
M M M B B
B B A A A B B
B
B
B
B
B
041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Differential Scale about arbitrary lines
041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
In Progresshellip
bull Switch to
httpwwwcsunccedu~zwartellITCS204120-5120currentLecturesWartellweb20pageITCS204120-2D20Transformsppt
041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Weird Cases Singular Matrices
1 0 0
0 0 0 - 2D space mapped to 1D space (line y=0)
0 0 1
0 0 0
0 0 0 - 2D space mapped to 0D space (point)
0 0 1
i
j
x x
y y
w w
x x
y y
w w
M
M
A
A
C
MiA maps all 2D space tothis line
MjA(C) ndash all 2D space maps to this pointA
MiA(C)
041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-

041823copyZachary Wartell
Revisions11 - Work in progress completely replacing and revamping Dr Hodges older slides
- 2D Transformations Revision 12 Copyright Zachary Wartell University of North Carolina All Rights Reserved
- Matrices Change of Coordinates vs Geometric Transform
- Recall Discrete Math 101 Relation Function One-to-one etc
- Recall Converse Relation
- Recall Function
- Recall Function One-to-one
- Recall Inverse of Function
- 2D Transform
- Affine Transformations
- Preserve Lines
- Parallelism
- Distance Ratios
- Translation
- Rotate
- Rotate about Origin
- Scaling Uniform
- Scale Differential
- Inverse Transforms
- Shear (along XY axis)
- Reflections
- Composing Transformations
- Matrix Composition Non-Communitive
- How do I rotate about arbitrary point p
- If I know v in B (33)B and MRot(θ) in A then how do I compute v in in B
- If I know v in B (33)B and MRot(θ) in A then how to I compute v in in B
- Generally If I know v in B and M in A then compute v in in B hellip
- Two ways to visualize____________________
- Scale about arbitrary point
- Differential Scale about arbitrary lines
- In Progresshellip
- Weird Cases Singular Matrices
- Revisions
-