60 - Vivek Thuravupala - Haptic Controlled MEMS Systems

of 31
-
Upload
vivek-suresh -
Category
Documents
-
view
218 -
download
0
Transcript of 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
1/31
Haptic Controlled MEMS Systems
Seminar Report
2011-2012
Submitted in partial fulfillment for the award of the Degree
of Bachelor of Technology in Electrical and Electronics
By
Vivek Suresh Babu Thuravupala
Univ Roll No. 65360Under the guidance of
Ms. Prathibha P.K.
Mr. Jebin Francis
Department of Electrical and Electronics
RAJAGIRI SCHOOL OF ENGINEERING AND TECHNOLOGY
Rajagiri Valley, Cochin-682039
Kerala, India
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
2/31
CERTIFICATE
This is to certify that the report entitled Haptic Controlled MEMS Systems is a bonafiderecord of the project done by Vivek Suresh Babu Thuravupala, of 7th semester Electrical
and Electronics Engineering in partial fulfillment of the requirements for the award ofDegree of Bachelor of Technology in Electrical & Electronics Engineering of the Mahatma
Gandhi University, Kottayam during the academic year 2011 2012.
Ms. Prathibha P.K.
(guide)
Asst ProfessorDept. of Electrical & Electronics Engineering
Mr. Jebin Francis
(guide)Lecturer
Dept. of Electrical & Electronics Engineering
Prof. K R Varmah
Place: Kakkanad Professor & HODDate: 19-12-2011 Dept. of Electrical & Electronics Engineering
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
3/31
Abstract
Haptic technology is a form of feedback that takes advantage of a users sense of touch
by applying forces, vibrations, and/or motions to the user. It allows the user to remotely
perceive the feel of actually engaging in the actions he/she is emulating. This allows for
remote perception of weight, force and other sensory experiences such as surface textures.
When used in conjunction with control mechanics and remote operating systems, this
allows for more reliable and natural operation which in turn reduces the chances of
accidents and improves work quality. MEMS, which stands for microelectromechanical
systems, refers to systems which operate on the micrometer scale. Generally, made up
of components between 1 to 100 micrometers in size (i.e. 0.001 to 0.1 mm) and MEMS
devices generally range in size from 20 micrometers (20 millionths of a meter) to a
millimeter.
i
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
4/31
Acknowledgement
First and foremost I thank God almighty for giving me the physical and mental
strength to complete the seminar successfully.
At the successful completion of my seminar, I would like to lend my sincere thanks
and profound sense of gratitude to the principal of Rajagiri School of Engineering and
Technology, Dr J. Issac. I solicit sincere thanks to respected Head of the Department
Prof. K R Varmah, for his constant encouragement and valuable suggestions. I would
like to express my deep sense of gratitude to the seminar co-ordinators Mr. Jebin Francis
and Ms. Prathibha P. K. for their whole hearted support.
I extend my sincere thanks to my guides, Ms. Prathibha P. K. and Mr. Jebin
Francis, for their kind co-operation and unfailing guidance throughout the completion
of this seminar. Also I extend my cheerful thanks to all the staff members of Electrical
and Electronics Department of my college for their helpful and timely suggestions.
Finally, sincere thanks goes to my Parents and friends for their inspiration and prayer
to complete this seminar.
Vivek Suresh Babu Thuravupala
ii
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
5/31
Contents
1 Overview 1
1.1 Haptics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 MEMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Haptics 3
2.1 General Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Types of Feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Haptic Rendering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 MEMS 9
3.1 General Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2 MEMS Fabrication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.3 Classifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Haptic Controlled MEMS Systems 16
4.1 MEMS Microgripper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.2 MEMS Actuators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.2.1 Electrothermal Actuators . . . . . . . . . . . . . . . . . . . . . . . 17
4.2.2 Electrostatic Actuators . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 Haptic Controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4 Finite Element Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Conclusion 23
iii
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
6/31
List of Figures
1.1 Example of a heightmap . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Example of a Microelectromechanical System . . . . . . . . . . . . . . . . 2
2.1 Augmented Reality Systems . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 God-Object vs. Ruspini Rendering Algorithm . . . . . . . . . . . . . . . . 7
4.1 Electrothermal Bent-beam Actuator Structure . . . . . . . . . . . . . . . 18
4.2 Electrothermal Hot/Cold Arm Actuator Structure . . . . . . . . . . . . . 18
4.3 Electrothermal Microgripper . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.4 Electrostatic Microgripper . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.5 Common Commercial Haptic Controllers . . . . . . . . . . . . . . . . . . . 20
4.6 FEA Analysis of a Microgripper . . . . . . . . . . . . . . . . . . . . . . . . 21
4.7 FEA Analysis of Asymmetrical Crash . . . . . . . . . . . . . . . . . . . . 21
iv
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
7/31
List of Abbreviations
1. MEMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Microelectromechanical Systems
2 . D N A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D e o x y r i b o n u c l e i c A c i d
3. HAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . High Aspect Ratio
4. HRA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Haptic Rendering Algorithm
5 . H I P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . H a p t i c s I n t e r f a c e P o i n t
6. IHIP . . . . . . . . . . Ideal Haptic Interface Point, Intermediate Haptic Interface Point
7. FEA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Finite Element Analysis
v
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
8/31
Chapter 1
Overview
By combining Haptic and MEMS technologies, its possible to extend the efficient
workspace of a human being into the micrometer scale. Haptic technology consists
of using sensors to convert sensory information at the end effector into electrical signals,
transmitting this signal to the controller, and recreating the sensory data in such a way
that allows the user to remotely perceive things like vibrations and surface textures.
Figure 1.1: Example of a heightmap
Using haptic technology, we can recreate the sensation of touching the surface shown
in Figure 1.1, using just the heightmap corresponding to the surface.
1
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
9/31
1.1 Haptics
Currently existing haptic controllers, sensors and rendering algorithms are useful forproducing haptic feedback at a single point. Such devices are available on the commer-
cial market, such as the Novint Falcon. At the same time, other haptic devices allow
navigation of virtual environments with accompanied sensory feedback. Future improve-
ments in haptic technology holds the promise of complete immersion in virtual reality
environments.
1.2 MEMS
MEMS technology is currently capable of realizing sensors like accelerometers, gyro-
scopes and pressure sensors, and characterizes the efficient use of space and energy.
Microelectromechanical Systems are basically microscale reproductions of macroscopic
scale objects. These devices are capable of replacing their corresponding macroscopic
scale components.
Figure 1.2: Example of a Microelectromechanical System
2
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
10/31
Chapter 2
Haptics
2.1 General Overview
Although the word haptics probably doesnt ring a bell for most people, the technology
is actually all around us already, theyre just being marketed under proprietary brand
names. A major example of this is the Force Feedback technology introduced by Logitech
for their racing controllers, which provides vibrative feedback to the user when the vehicle
crashed or hit a bump.In theory, the concept of haptics is simple enough. Consider a mechanical end effector
thats capable of mirroring human actions exactly, however the human is unable to
perceive the environment the effector is in. So first, sensors are necessary to convert
the environmental variables around the effector into electrical signals so they can be
transmitted to the user. Next, the signals need to be converted back to the appropriate
physical stimulus once it reaches the user. This conversion can be done using electric,
pneumatic or hydraulic actuators. The complexity of haptics emerges from the fact that
the signals cant be converted directly into a faithful reproduction of the environmental
variable which produced it. Then a processor needs to be added to modify the signal
according to a certain set of rules, and accordingly convey the signal to the actuators.
The set of rules is known as the Haptic Rendering Algorithm, and is used to ensure a
high fidelity reproduction of the original sensory input at the users end.
Common examples of simple haptic devices in our everyday lives are:
Mobile Phones
3
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
11/31
Mobile phones with interfaces which lack physical buttons face the difficulty that
the user cant know when the button is pressed except through a visual stumulus.
Hence, a haptic feedback is required everytime such a button is engaged, in this
case, a vibratory or auditory feedback is provided. Its common in full touchscreen
phones for the device to produce a small vibration or a small tone to signal to
the user that an input has been received. Human beings tend to be impatient,
and without this feedback, they would continue to press the button until they saw
some reaction, or they may inadervently press the button while doing something
else.
Aircraft Servomechanisms
The ailerons and fins on modern aircrafts are actuated by servomechanisms, which
mimic the actions of the pilot. However, if the pilot is unable to feel the resistance
these surfaces encounter in different positions, then he is unable to maintain safe
flying conditions at all times. For example, if these control surfaces are in inappro-
priate conditions, they encounter a large amount of air resistance. If the pilot is
unable to perceive this resistance, then the unsafe condition is only noticed after
the plane begins to stall. Providing haptic feedback at the pilots controls allow
the pilot to perceive dangerous flying conditions before theyre felt.
Teleoperation of Robotic Equipment
Haptic feedback has also been implemented in excavators and digging machines.
In cases where these machines must operate in a mixed environment, such as when
excavating in an area where soft clay is mixed with hard rocks, the operators
are able to manipulate the machines more effectively around the hard rocks when
feedback is provided. This allow the operators to move around unseen obstacles
and thus, increases productivity and decreases the possibility of damage to the
equipment.
Augmented Reality Simulators
For training surgeons or pilots, its impractical to train using live specimen or real
airplanes. In these cases, simulators and augmented reality systems are used. The
physical objects that the surgen practices on, or the plane the pilot learns with,
are nonexistent. They only exist as a virtual model, and the interactive forces
4
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
12/31
perceived are produced by haptic rendering algorithms. In the case of a surgeon
learning to operate on a patient, this allows them to feel the difference between
cutting through bone or flesh without endangering anyone. In the case of a pilot
learning to fly, this allows them to learn without endangering any lives, and also
enables them to learn to handle dangerous scenarios without putting themselves
in danger.
Figure 2.1: Augmented Reality Systems allow surgeons to practice dangerousprocedures without endangering any lives.
2.2 Types of Feedback
Depending on the type of information thats gathered and reproduced, haptic feedback
can be divided into two major categories: Kinesthetic and Tactile feedback.
Kinesthetic Feedback
Consider grasping an object, for example, an orange. If your eyes are closed, then
there are certain details about the orange which can be perceived by touch alone.
For example, one can immediately realize that the general shape of the orange is
spherical and can even estimate its size. This information is gathered based on
the joint angles and miscle lengts of each joint in the hand, which is then processed
by the brain. Using this data, its position relative to the body can be determined
as well. All this data is considered kinesthetic data.
Tactile Feedback
In addition to the kinesthetic data perceived, addition information is gathered
by the fingertips, which have receptors for different stimuli such as pressure and
5
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
13/31
vibration. From these, we can determine the texture of the orange, how hard our
grip is, and what temperature the surface of the orange is at. All this data is
considered tactile data.
For effective haptic recreation of an object, both tactile and kinesthetic feedback
must be present. However, due to the complexity of the hardware required, usually only
one type of feedback is provided. Or in the case of certain interface devices, tactile
feedback is provided, but only at a single point on the virtual body.
2.3 Haptic Rendering
In a case where the physical object doesnt actually exist, then there are no sensors
which can produce electrical signals to be processed. In this case, a virtual model of
the object is required, and the forces felt by the user are created by a Haptic Render-
ing Algorithm(HRA). These algorithms use a 3-Dimensional model of the object being
simulated to determine the point of contact between the user and the object, if any, and
then produces the appropriate forces along the appropriate actuators to make the user
feel like he/she is actually interacting with the object. Two widely used algorithms arethe God-Object Algorithm and the Ruspini Renderer Algorithm. Both of these are very
similar, however the latter corrects a major algorithmic flaw in the first can produce
errors.
God-Object Renderer
The God-Object Renderer was introduced in 1995, and only requires the position of
the end effector in space and the virtual model to determine the forces which need
to be produced. Haptic interfaces function upon the principle of force equality,which directly follows Newtons Law that any force is accompanied by an equal
and opposite force. Then, when a person, or a robot for that matter, touches an
object, the object also pushes back with that same force. Then, by determining
this force and applying it on the controller, its possible to emulate the effects of
actually touching that object, even if the object itself is virtual.
The renderer uses the current position of the end effector in space to create a
Haptic Interface Point (HIP) in the model of the object. In addition to this,
6
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
14/31
another point known as the Ideal Haptic Interface Point is also created, which is
always outsite the object, and will never cross into the volume of the object. In
a situation where the user is navigating space outsite the object, both the HIP
and IHIP coincide and the user feels no resistance to motion. However, if the
user navigates into the volume of the object itself, then the HIP moves into the
object and the IHIP remains at the surface, thereby a difference in the positions
of these two entities emerges. Now assume that these two points are connected
by a spring. Then when their poisitions coincide, the HIP feels no force due to
the spring. However, as their positions diverge, the spring stretches and the HIP
feels a force directed towards the IHIP. This force is then realized using actuatars
and applied onto the controller, which is then perceived by the user as resistive
force, meaning that the user is now in contact with the object. Depending on
the strength of the hypothetical spring, the hardness of the surface can vary in
perception from soft to hard.
Ruspini Renderer
In 1997, an improvement of the God-Object Renderer was introduced, known as
the Ruspini Renderer. When using the God-Object Renderer, if there are any
holes in the mesh model used, then at certain points, the user may be able to
poke through the object, and wont be able to get out until a hole in the mesh
is encountered again. This is the main flaw of the God-Object Renderer, and
is corrected by the Ruspini Renderer. In the God-Object Renderer, the IHIP is
Figure 2.2: (a) Positioning of the HIP and IHIP using God-Object Renderer when theuser is touching the object. (b) Flaw in the God-Object Renderer which allow the userto enter the object through holes in the model mesh. (c) Ruspini Rendering Algorithm
uses a sphere instead of a point for the IHIP to overcome the flaw of the God-Object
Renderer.
7
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
15/31
represented by a point which always remains outside the surface of the object.
Then if a hole in the mesh is encountered which is larger than the IHIP, it will
pass though to the inside of the object. The Ruspini Renderer uses a sphere
instead of a point for the IHIP, thereby even if it encounters a hole in the mesh
which is smaller than the IHIP sphere, the IHIP will remain outside the object.
Then by selecting a IHIP larger than the polygon size of the mesh, this flaw can
be eliminated completely. However, if the IHIP sphere is too large, then loss of
resolution will occur and fine surface details will not be perceptible.
8
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
16/31
Chapter 3
MEMS
3.1 General Overview
MEMS stands for microelectromechanical systems and refers to any mechanical system
with components raning between 1 to 100 micrometers in size and operating using elec-
tical energy. These machines can resemble replicas of macroscopic scale machinery, but
since theyre operating at such small scales, theyre exempted from the constructs of
classical physics, and are more affected by surface phenomenon such as electrostaticsand wetting. Sinces these structure are so small, their volume to surface area is much
smaller than usual, hence volume effects such as inertia and mass arent as important
when considering their mechanics.
There are a wide range of applications of MEMS in science and engineering fields
such as:
Medicine
1. MEMS pressure sensors used to monitor a patients vital signs, such as blood
pressure and respiration.
2. Disposable MEMS sensors used to monitor blood pressure, providing a low
cost alternative to the reusable sensors used before.
3. Wireless MEMS sensors which can be implanted into a human body. Mea-
surements from these devices can be obtained by remote scanning.
Communications
9
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
17/31
1. MEMS inductors and tunable capacitors provide significantly improved per-
formance compared to their integrated counterparts.
2. Provide improved performace through use of MEMS devices at a lower cost
and space requirement.
3. Radio Frequency MEMS applications in resonators as mechanical filters for
communication circuits.
Inertial Sensing
1. MEMS accelerometers and gyroscopes are quickly displacing conventional gy-
roscopes and accelerometers in applications such as crash safety systems.
2. MEMS sensors such as those mentioned above are also being used in consumer
devices such as smart phones.
Biotechnology
1. Biochips for detection of hazardous chemicals, drug screening and detection
of biological agents.
2. Microsystems for DNA amplification and identification
3. Micromachined Scanning Tunneling Microscopes
3.2 MEMS Fabrication
The same methods used for fabrication of semiconductor devices cane be modified and
used for fabrication of MEMS devices. The materials used for MEMS fabrication are:
Silicon
Silicon is already used for creating most integrated circuitry and it can also be
adopted for creation of MEMS devices. Cheap availability of high quality silicon
and ability to incorporate electronic functionality makes silicon a popular choice
for fabrication. In addition, silicon is also an almost perfect Hookean material,
so it produces almost no hysterisis when its flexed, and hence almost no energy
dissipation. This means a silicon device can have a service lifetime in the range of
billions to trillions of cycles.
10
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
18/31
Polymers
When materials are required in large volumes, synthetic polymers can be an al-
ternative to silicon. These polymers can be produced in large quantities and with
varying characteristics.
Metals
While silicon maybe the primary choice when it comes to MEMS fabrication, its
also possible to use metals, as long as their operation is limited to within their
limitations.
CeramicsCeramics can be used to produce sensors with piezoelectric properties which can
have sensitivity to normal and shear forces. The types of ceramics used are gen-
erally nitrides of silicon, aluminium and titanium, allowing for a range of possible
material properties.
Using these materials, fabrication can be done in three methods, each of which adapts
existing technology. The three methods are:
Deposition
The basic step in MEMS fabrication is the deposition of a thin film of the base
substrate. But just being able to deposit a film isnt important, its the ability to
control the thickness of the film from a few nanometers to a 100 micrometers. The
deposition process can be carried out in two methods: physical vapor desposition
and chemical deposition.
In pysical vapor deposition, the deposited material is acquired form a target and
deposited onto the required surface. Sputtering is one method, in which an ion
beam is used to liberate atoms from a target, and then move these to the desired
substrate. Another method of physical vapor deposition is evaporation. Here the
required atoms are evaporated from the target surface using hear or an electron
beam in a vacuum.
In chemical deposition, a controlled chemical reaction between the substrate and a
gas is used to grow the required film on the substrate surface. Two main processes
are Low Pressure checmical vapor deposition abd Plasma Enchanced chemical
11
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
19/31
vapor deposition. In cases where oxide films need to be produced, a technique
known as thermal oxidation can be used, in which a silicon wafer is exposed to
oxygen and steam to grow a thin film of silicon dioxide.
Patterning
Patterning involves the transfer of a pattern onto a base material. The main
method of doing this is known as Lithography. Lithography involves selectively
exposing a photosensitive material to a radiation source. The photosensitive ma-
terial then experiences some physical change when exposed to this radiation. This
difference in physical properties can then be used to our advantage. For example,
consider a photosensitive film which is exposed to light passed by a mask. The
material is then shielded over an area which is identical to the shape of the mask,
and the rest of the film undergoes some change. Now this difference in physical
attributes can be used to remove the surrounding material, which then leaves us
with the masked area, on a thin film, revealing the underlying substrate.
One type of lithography is Electron Beam Lithography(EBL). In EBL, a beam of
electrons serves as the radiation source, and its scanned across a surface covered
in a resist film. The exposes areas of the resist is then removed, and very small
structures can be produced in the resist using this method.
Etching
Etching is simliar to patterning, in that it uses a masking material. However,
in patterning the substrate is on the surface. In etching, the surface acts as the
mask and the base acts as the substrate. Ethcing can be broadly divided into two
categories: dry etching and wet etching.
In dry etching, the material to be etched is dissolved or removed using ractive ions
or an etchant. Reactive ion echting is also called Plasma etching. In this process,
the substrate is placed inside a reactor and several gases are introduced. The gases
are then excited using an RF power source, and a plasma is formed. These ions
have high enough energy levels to knock atoms out of the substrate. In addition,
the ions also react with the surface. Hence, dry etching is composed of a chemical
and a physical process. A proper balance between these two processes must be
maintained to obtain the desired etching characteristics.
12
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
20/31
A subclass of dry etching is deep reactive ion etching, which involves al alternating
composition of ion gases in the chamber. This method provides almost vertical
sidewalls to depts of hundreds of micrometers.
In wet etching, the substrate material is selectively removed by dipping it into a
solution. A mask is used to determine the areas which are removed. Different
classifications of wet etching can be determined based on the speed of etching, and
whether or not its dependent on direction. If the speed of etching is the same in
all directions throughout the material, then its known as isotropic etching. In this
case, long narrow holes in the mask will produce v-shaped grooves in the silicon,
with atomically smooth surfaces if carried our correctly.
Some crystal materials will have different etching rates depending on the crystal-
lographic orientation in which the etching is carried out. This type of etching is
known as anisotropic etching, and can be used to produce pyramid shaped holes
in the substrate, with 54.7 walls.
After a large number of devices have been prepared on a silicon wafer, the individual
dies have to be separated. The parts of the wafer that are used and how theyre separated
determine the manufacturing technology. The scale at which these fabrication methods
are applied and the methods in which they are applied can be divided into the following
categories:
Bulk Micromachining
In bulk micromachning, the entire volume of the substrate is used for MEMS fabri-
cation. Usually, silicon wafers are used as the substrate, since its crystallographic
structure allow for anisotrophic etching. This enables the productino of high reg-
ular structures, as the dissolution rates in different angles can vary by as much as
a thousand times. The wet etching usually uses alkaline liquid solvents to dissolve
silicon exposed by photolithography.
Bulk micromachining starts with a silicon wafer or other substrates which is se-
lectively etched, using photolithography to transfer a pattern from a mask to the
surface. Like surface micromachining, bulk micromachining can be performed with
wet or dry etches, although the most common etch in silicon is the anisotropic wet
etch. This etch takes advantage of the fact that silicon has a crystal structure,
13
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
21/31
which means its atoms are all arranged periodically in lines and planes. Certain
planes have weaker bonds and are more susceptible to etching. The etch results in
pits that have angled walls, with the angle being a function of the crystal orienta-
tion of the substrate. This type of etching is inexpensive and is generally used in
early, low-budget research.
Surface Micomachining
Unlike Bulk Micromachining which uses the entire substrate volume, surface mi-
cromachining uses successively deposited layers. A layer of polysilicon is used as
a substrate layer, and is covered by a sacrificial layer of silicon dioxide. This sac-
rificial layer is used as a mask when fabricatino processes are applied. Once this
layer is machined, the next layer is deposited and the process continues until the
entire structure is machined.
The sacrificial layer is later removed leaving just the structural layers, which form
the micromachine. For example, a suspended cantilever can be built by depositing
and structuring a sacrificial layer, which is then selectively removed at the locations
where the future beams must be attached to the substrate. The structural layer is
then deposited on top of the polymer and structured to define the beams. Finally,
the sacrificial layer is removed to release the beams, using a selective etch process
that will not damage the structural layer.
So in Surface Micromachining, the properties of the substrate are not as important
as in bulk micromachining, since the structures are built on top of the substrate
and not inside it. In addition, this method can be applied to larger surfaces than
silicon wafers, such as displays and thin film solar cells. The deposition can even
take place on non-rigid materials to allow for flexible constructions.
High aspect ratio silicon micromachining
HAR micromachining is a method adapted specifically for the machining of struc-
tures with a high aspect ratio, which in this case is considered the ratio of the
width of an object to its height. A structure machined using this method can
have thicknesses up to 100 m.
14
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
22/31
3.3 Classifications
The fabricated devices can be classified by their use as:
Sensors
The most common MEMS sensors and transducers are pressure sensors, vibration
sensors, gyroscopes and accelerometers. Due to the small scale of the MEMS
architecture, sensors such as gyroscopes and accelerometers are not affected by
inertia, so the forces on a displaced weight can be used to measure the motion of
the object within which the sensor is embedded.
Actuators
Actuators are used in MEMS systems for microrobotic applications, such as micro-
grippers. These generally consist or a large array of linear actuators which together
provide the required force to move the gripper. Depending on the structure, linear
and curvilinear motion can be produced.
Structures
The sensors and actuators cant create a MEMS system on their own. In addition
to these, structures are required to provide support for the sensors and actuators,
necessary mounting points, and containment.
15
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
23/31
Chapter 4
Haptic Controlled MEMS
Systems
Generally, MEMS systems are restricted to accelerometers, gyroscopes and other devices,
other advances systems are built for testing. However, manipulation at the microscopic
scale can be made possible using Haptics enabled MEMS systems. One basic example of
this would be a microscopic realization of a robotic gripper. Robotic grippers are used
widely today, ranging from serving as automated industrial robots to remote controlled
arms. The design of these grippers is simple, featuring two fingers which move together
to grasp an object. Realization of this arm on a microscopic scale allows for manipula-
tion of microscopic objects ranging from cells to larger biological specimen, or MEMS
structures, sensors and actuators.
4.1 MEMS Microgripper
At the micrometer scale, the gripper begins to closely resemble a pair of tweezers. To
accomplish its goal of manipulating objects effectively on the micrometer scale, it needs
to be able to manipulate objects without damaging them, so it must have precise control
over the forces it exerts. In cases where the gripper is manipulating biological specimen,
it must also be able to operate in a liquid media, and move the cells as desired without
causing any damage. In order to achieve these goals, its desirable for the operator to
be able to feel the same forces felt by the gripper when handling the objects.
16
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
24/31
4.2 MEMS Actuators
The actuators used in the microgripper can be divided into two broad categories: Elec-trothermal and Electrostatic. The former uses differences in expansion due to tempera-
ture to produce motion, while the latter uses electrostatic forces to produce motion.
4.2.1 Electrothermal Actuators
The main principle of operation for electrothermal actuators is based on the thermal
expansion of elastic flexures or beams. Consider the simple linear actuator shown in
Figure 4.1. The four lateral beams connecting the movable shuttle to the fixed bases
will expand as temperature increases. So then, by connecting a voltage source as shown
in the figure, between the two base points, a small current will flow through the lateral
beams. This flow will produce a heating, the magnitude of which can be controlled by
controlling the current, by varying the applied voltage. As these lateral beams heat
up, they will expand, which will cause the moving shuttle to displace in the direction
indicated by the arrow in the figure. As the voltage is now decrease, the current flow
decreases and the temperature of the beams also decreases, causing them to shrink back
to their normal size. This will cause the movable shuttle to displace in the direction
opposite to the one shown in the figure.
This type of actuator is known as a Bent-beam, or V-shape, actuator due to its
shape. Another type of electrothermal actuator is the Hot/cold arm, or U-shaped,
actuator. An example of a U-shaped actuator is shown in Figure 4.2. In the U-type
actuator, a radial motion is produced due to the different temperatures in the hot and
cold arms of the actuator. As shown in the figure, the thicker of the two arms is called
the cold arm. Since the heating is produced by the flow of current, the heating effect
will be lesser for a thicker arm. Hence, even though the current through the two arms
are the same, the temperature of the hot arm will be much greater than the cold arm,
and so will the change in length. Since the hot arm expands more than the cold arm,
the end of the arm moves in the direction indicated in the figure. This type of actuator
can be used to form a gripper as shown in Figure 4.3.
17
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
25/31
Figure 4.1: Electrothermal Bent-beam Actuator Structure.
Figure 4.2: Electrothermal Hot/Cold Arm Actuator Structure
4.2.2 Electrostatic Actuators
Another type of MEMS actuator is known as a Electrostatic Actuator, which uses the
electrostatic forces between two plates to produce motion. This type of actuator has
intersecting plates with protruding teeth, as shown in Figure 4.4. One of these plates
18
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
26/31
Figure 4.3: Electrothermal Microgripper using two U-shaped actuators
is anchored, while the other is movale. As the voltage applied between these two plates
is increased, the attractive forces between them also increases, and eventually causes
the movable plate to move closer to the anchored plate. When a large number of these
plates with interlocking teeth are connected in unison, the force due to a small voltage
can be amplified enough to produce linear motion in the gripper. Since this mechanism
can only serve to move the plates closer together, and cant be used to move the plates
apart, an elastic mechanism must be included at the mounting point for the movablefinger to ensure that when the applied voltage is reduced, the movable plate will pull
back away from the anchored plate.
Figure 4.4: Electrostatic Microgripper using an array of electrostatic actuators
19
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
27/31
4.3 Haptic Controllers
Haptic Controllers are the actual devices which are used to control the MEMS systemsand where the user feels the feedback. They give a force-feedback to the user in response
to computer generated values. This makes haptic controllers perfect for interacting with
micrometer scale objects. Using this, a person can assemble machinery using a MEMS
controller, sort cells and perform micrometer pick-and-place operations.
In order to to able to manipulate objects effectively, a haptic controller requires two
types of control: Mesoscale and Microscale. Mesoscale control means having the ability
to control the position of the entire positioning system itself, so an object can be moved
over large distances. Microscale control means having the ability to control the position
of the object very precisely in a small area, without moving the actual actuator itself.
Both types of control are necessary to move a microscale object from one poisition to
another effectively. An actuator with only mesoscale control abilities will be unable
to accurately move objects on the microscale, while a controller with only microscale
control abilities will be restricted to working in a small area.
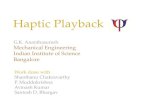
Figure 4.5: Commercial Haptic Controllers: (Right) The Novint Falkon and (Left) ThePhantom Omni
Common haptic controllers on the market now are the Novint Falkon, which is a
3-axis 3-Dimensional haptic controller, and the Phantom Omni, a 6-degrees of freedom
haptic controller which applies a rendering algorithm at its tip.
4.4 Finite Element Analysis
Although we approximate the MEMS structures as rigid bodies, in actual pratice, these
are susceptible to bend when placed under a certain amount of pressure. So, in order
20
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
28/31
to ensure that the device will remain operational under the required conditions, FEA
techniques are applied to a simulated model of the device before fabrication takes place.
FEA analysis basically uses a 3D mesh representing the device, along with parameters
which describe the material such as its resistivity, Youngs modulus, thermal conduc-
tivity etc., to generate a simulated model. This model can then tested under different
conditions to determine the areas where the device is most stressed and how the device
will react in specific conditions.
Figure 4.6: FEA Analysis of a Microgripper showing input voltage vs. displacement ina simulation
Figure 4.7: FEA Analysis of Asymmetrical Crash showing difference in vertex densitybased on the areas of interest
21
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
29/31
FEA is used widely in the industry to simulate interactions which would be too
costly or impractical to repeatedly test in reality. For example consider the asymmetric
collision test performed on a car shown in Figure 4.7. In any simulation, the amount
of unnecessary processing must be reduced to increase efficieny. So when carrying out
FEA analysis, the mesh is specifically generated so that the areas of interest will have
a more detailed mesh while the remaining areas will have less detail. In the case of the
car, the area which is experiencing the crash has much more vertices than the back of
the car which will most likely be unaffected by the crash. Similarly, when testing on
a MEMS device, the density of vertices will be distributed differently for each test, as
shown in Figure 4.6.
22
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
30/31
Chapter 5
Conclusion
Further concentration developing the integration of Haptics into MEMS will allow for
groundbreaking discoveries such as miniature factories. In a lecture by Richard P.
Feynman given in 1959, he talks about the obsession with making things larger, and
how making things smaller should be given more consideration. Now more than half a
decade later, we still havent reached his vision of micrometer scale factories and robots.
However, with further development, this technology holds the promise to provide novel
solutions to some of our most pressing problems.
23
-
8/2/2019 60 - Vivek Thuravupala - Haptic Controlled MEMS Systems
31/31
Bibliography
[1] Feynmans Talk. Aug. 2011. url: http://www.zyvex.com/nanotech/feynman.html.
[2] Finite Element Method. Aug. 2011. url: http://en.wikipedia.org/wiki/Finite_element_method .
[3] Haptic Technology. Aug. 2011. url: http://en.wikipedia.org/wiki/Haptic_technology.
[4] William Harris. How Haptic Technology Works. Aug. 2011. url: http :/ / electronics . howstuffworks . com / gadgets / other - gadgets / haptic -
technology.htm.
[5] Microelectromechanical Systems. Aug. 2011. url: http://en.wikipedia.org/wiki/Microelectromechanical_systems .
[6] H3D Tutorials. Haptic Rendering Algorithms. Aug. 2011. url: https://sites.google.com/site/h3dtutorials/haptic_rendering_algorithms .
[7] Ashwin Vijayasai. Haptic controlled three-axis MEMS gripper system. Oct. 2010.url: http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=5614847 .
[8] Ashwin Vijayasai. Haptic Controlled X-Y-Z MEMS Gripper System. Aug. 2010.url: http://dspace.lib.ttu.edu/etd/handle/2346/ETD-TTU-2010-08-848.