デンマークの地域熱供給(DH)...デンマークのエネルギーシステムの概要 デンマークの一次 エネルギー供給 世界一次エネル ギー消費 家庭暖房用燃料
Upload
shinichi-nishimuraCategory
view
903download
3
ロボットバトルで
子供の運動不足を解消! 芝浦工大OB
石橋
子供の運動不足が問題になっている
・・らしい・・
子供に運動する機会を与える事は出来ないか?
ロボットセミナー
芝浦工業大学で行われている小学生向け
ロボット講座
6本の足と2本のアームをモーター3つで
コントロール。操作はタミヤの4chコン
トロールボックスで行う
もっと激しく遊んで欲しい!
身体を使ってロボットを操作するシステムを
開発して子供たちに運動する気になってもら
おう!
2010年4月~2012年3月
最初広報担当だったはずが、いつの間にか解発担当者に
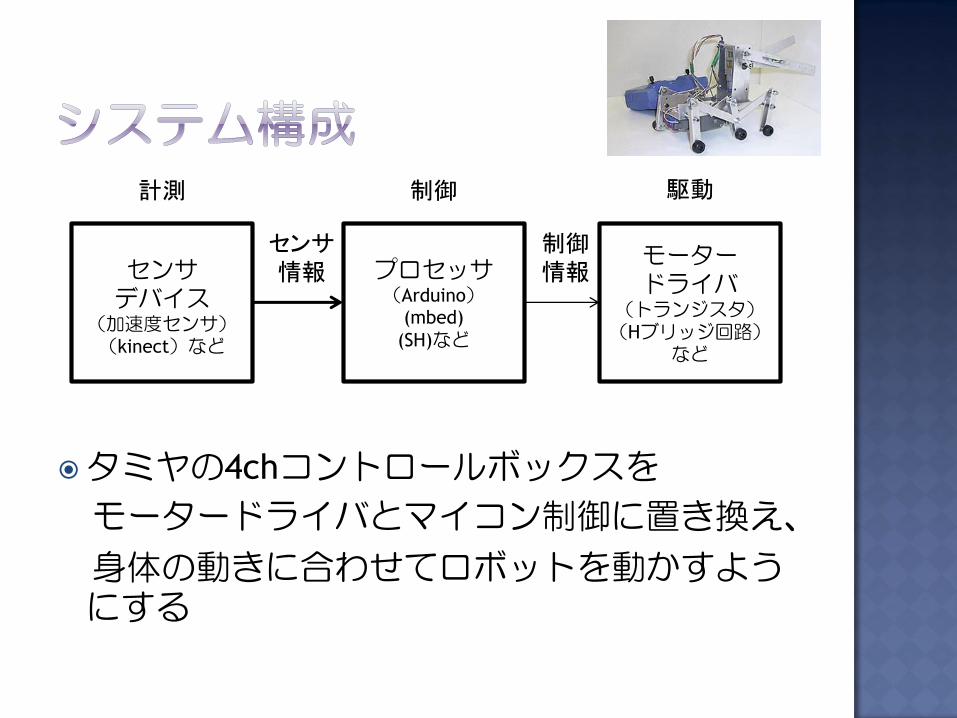
タミヤの4chコントロールボックスを
モータードライバとマイコン制御に置き換え、
身体の動きに合わせてロボットを動かすようにする
センサ
デバイス (加速度センサ)
(kinect)など
プロセッサ (Arduino)
(mbed)
(SH)など
モーター
ドライバ (トランジスタ)
(Hブリッジ回路)など
計測 制御 駆動
センサ
情報
制御
情報
手で加速度センサを持ってもらって、
振動をロボットの動きに変換する
当時出はじめて話題となったKINECTで
人のジェスチャーを検知してロボットの
動きに変換する
出来た
惜しい
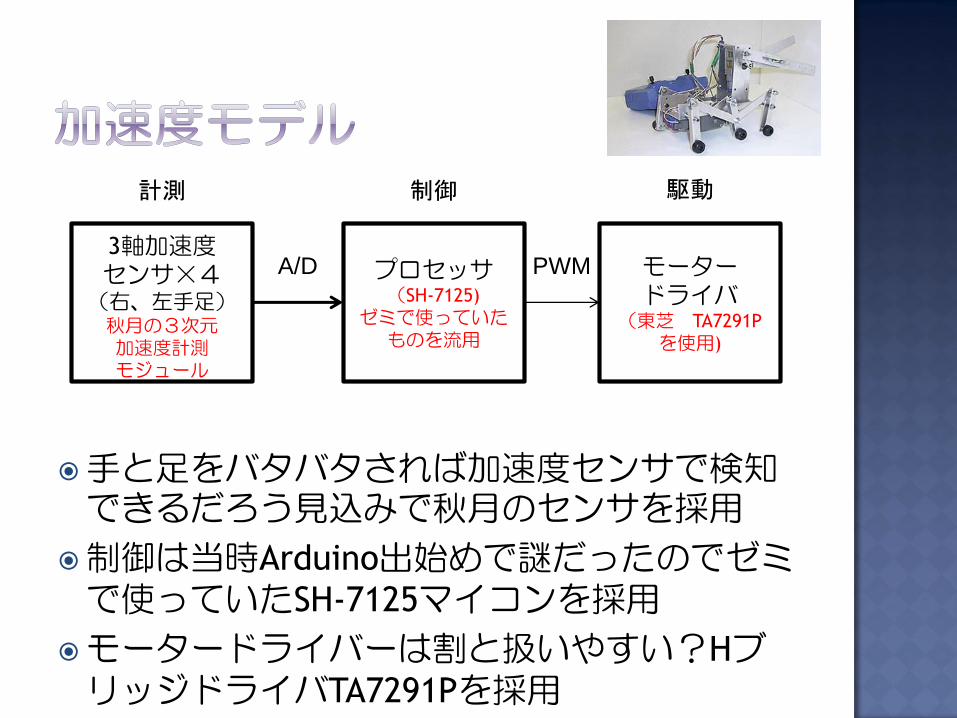
3軸加速度
センサ×4 (右、左手足) 秋月の3次元
加速度計測
モジュール
プロセッサ (SH-7125)
ゼミで使っていた
ものを流用
モーター
ドライバ (東芝 TA7291P
を使用)
計測 制御 駆動
手と足をバタバタされば加速度センサで検知できるだろう見込みで秋月のセンサを採用
制御は当時Arduino出始めで謎だったのでゼミで使っていたSH-7125マイコンを採用
モータードライバーは割と扱いやすい?HブリッジドライバTA7291Pを採用
A/D PWM

プロモーションムービー https://www.youtube.com/watch?v=YOVTud-mHTU

デモ
https://www.youtube.com/watch?v=ZgKs9sMJjsk
実機(ハード・ソフト)の作成が楽だった。
振動だけだと複雑な操作が難しい
(例えば一旦引いてアームを動かす・・とか
アンケートの結果では、来てくれた子供たち
は結構楽しんでもらえた模様
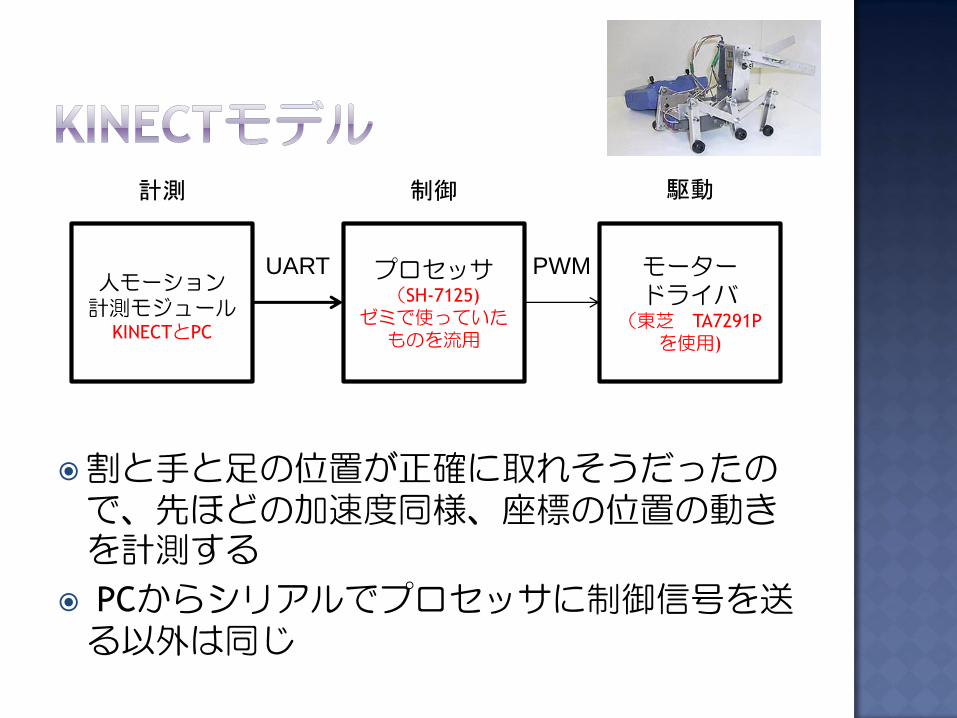
人モーション
計測モジュール KINECTとPC
プロセッサ (SH-7125)
ゼミで使っていた
ものを流用
モーター
ドライバ (東芝 TA7291P
を使用)
計測 制御 駆動
割と手と足の位置が正確に取れそうだったので、先ほどの加速度同様、座標の位置の動きを計測する
PCからシリアルでプロセッサに制御信号を送る以外は同じ
UART PWM
作成した結果 → 動作不安定
原因
バッファのクリアが追いつかなかった。
→一定周期でシリアルを送信していたが、
クリアが追いつかなかった。
制御信号の変化にモータードライバが
追いつかなかった
→情報にフィルタが必要だった・・
身体の動きに合わせて動くロボットバトル
システムを開発した
子供たちに遊んでもらって多少ないし
興味を持ってもらえた
割とコストが高い
すぐ飽きられてしまうという懸念が残る


















