3d Beam Element Including Warping and Shear Effects

of 15
Transcript of 3d Beam Element Including Warping and Shear Effects
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
1/15
3-D beam element of composite cross section including warpingand shear deformation effects
E.J. Sapountzakis *, V.G. Mokos
Institute of Structural Analysis, School of Civil Engineering, National Technical University of Athens, Zografou Campus, GR 157 80 Athens, Greece
Available online 27 October 2006
Abstract
In this paper a boundary element method is developed for the construction of the 14 14 stiffness matrix and the nodal load vector ofa member of arbitrary homogeneous or composite cross section taking into account both warping and shear deformation effects. Thecomposite member consists of materials in contact each of which can surround a finite number of inclusions. To account for shear defor-mations, the concept of shear deformation coefficients is used. In this investigation the definition of these factors is accomplished using astrain energy approach. Seven boundary value problems are formulated and solved employing a pure BEM approach, that is onlyboundary discretization is used. The evaluation of the shear deformation coefficients is accomplished from stress functions using onlyboundary integration. Numerical results are presented to illustrate the method and demonstrate its efficiency and accuracy. The influenceof the warping effect especially in composite members of open form cross section is analyzed through examples demonstrating the impor-tance of the inclusion of the warping degrees of freedom in the analysis of a space frame. Moreover, the discrepancy of both the deflec-tions and the internal forces of a member of a spatial structure arising from the ignorance of the shear deformation effect necessitates theinclusion of this additional effect, especially in thick walled cross section members. 2006 Elsevier Ltd. All rights reserved.
Keywords: Nonuniform torsion; Composite; Warping; Bar; Beam; Twist; Boundary element method; Stiffness matrix; Shear deformation
1. Introduction
One of the problems often encountered in engineeringpractice is the analysis of rectilinear or curved membersof structures of composite or homogeneous cross sectionsubjected to twisting moments. Accurate analysis of curvedbox shaped bridges or composite concrete slab stiffened bysteel beams is difficult to be achieved for two reasons.
According to the first reason, generally commercial pro-grams consider six degrees of freedom at each node of amember of a space frame, ignoring in this way the warpingeffects due to the corresponding restraint at the ends of themember [13]. If the aforementioned structures are ana-lyzed or designed for torsion considering only the effectof Saint Venant torsion resistance, the analysis may under-
estimate the torsion in the members and the design may beunconservative. Several researchers tried to overcome thisinaccuracy by developing a 14 14 member stiffness matrixincluding warping degrees of freedom at the ends of amember with open thin-walled homogeneous cross sectionand assuming simple [47] or more complicated torsionalboundary conditions [8,9].
According to the second reason, the aforementioned
commercial programs ignore shear deformations due tothe fact that they are unable to compute shear correctionfactors. Though these deformations are quite small in mostcivil engineering applications, they may be dominant insome situations, where bending moments are small com-pared to shear forces acting on the member. This is nor-mally true in short span beams or in structural systemssuch as curved box girder bridges.
In this paper a boundary element method (BEM) isdeveloped for the construction of the 14 14 stiffnessmatrix and the nodal load vector of a member of arbitrary
0045-7949/$ - see front matter 2006 Elsevier Ltd. All rights reserved.
doi:10.1016/j.compstruc.2006.09.003
* Corresponding author.E-mail addresses: [email protected] (E.J. Sapountzakis),
[email protected] (V.G. Mokos).
www.elsevier.com/locate/compstruc
Computers and Structures 85 (2007) 102116
mailto:[email protected]:[email protected]:[email protected]:[email protected] -
8/2/2019 3d Beam Element Including Warping and Shear Effects
2/15
homogeneous or composite cross section taking intoaccount both warping and shear deformation effects. Thecomposite member consists of materials in contact eachof which can surround a finite number of inclusions. Toaccount for shear deformations, the concept of shear defor-mation coefficients is used. There are several definitions of
these factors. In this investigation the approach of Bach[10] and Stojek [11] is employed using a strain energyapproach, instead of Timoshenkos [12] and Cowpers[13] definitions, for which several authors [14,15] havepointed out that one obtains unsatisfactory results or defi-nitions given by other researchers [16,17], for which thesefactors take negative values. Seven boundary value prob-lems with respect to the variable along the bar angle oftwist, to the primary warping function, to a fictitious func-tion, to two stress functions and to the beam transverse dis-placements are formulated and solved employing a pureBEM approach, that is only boundary discretization isused. Numerical results are presented to illustrate the
method and demonstrate its efficiency and accuracy. Theinfluence of the warping effect especially in composite
members of open form cross section is analyzed throughexamples demonstrating the importance of the inclusionof the warping degrees of freedom in the analysis of a spaceframe. Moreover, the discrepancy of both the deflectionsand the internal forces of a member of a spatial structurearising from the ignorance of the shear deformation effect
necessitates the inclusion of this additional effect, especiallyin thick walled cross section members.
2. Stiffness matrix and nodal load vector formulation
Consider a prismatic element of length L with an arbi-trarily shaped composite cross section consisting of materi-als in contact, each of which can surround a finite numberof inclusions, with modulus of elasticity Ej and shear mod-ulus Gj, occupying the regions Xj (j= 1,2, . . . , K) of the y;zplane (Fig. 1). The materials of these regions are assumedhomogeneous, isotropic and linearly elastic. Let also theboundaries of the nonintersecting regions Xj be denoted
by Cj (j= 1,2, . . . , K.). These boundary curves are piecewisesmooth, i.e. they may have a finite number of corners.
Fig. 1. Prismatic beam (a) with a composite cross section of arbitrary shape occupying the two dimensional region X (b) C~y~z is the beam principal
centroidal system of axes, while Myz is the corresponding one through the shear center M.
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 103
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
3/15
In order to include the warping behaviour in the studyof the aforementioned element in each node at the elementends a seventh degree of freedom is added to the wellknown six DOFs of the classical three-dimensional frameelement. The additional DOF is the first derivative of theangle of twist h0x dhx=dx denoting the rate of change of
the angle of twist hx, which can be regarded as the torsionalcurvature (Fig. 2) of the cross section. Thus, the nodal dis-placement vector in the local coordinate system, as shownin Fig. 1, can be written as
fDigT fu~xj u~yj u~zj hxj h~yj h~zj h0
xj u~xk u~yk u~zk hxk h~yk h~zk h0
xkg
1
and the respective nodal load vector as
fFigT fNj Q~yj Q~zj Mtj M~yj M~zj Mwj Nk Q~yk Q~zk
Mtk M~yk M~zk Mwkg 2
where Mt is the twisting moment at the ends of the element
given as
Mt MPt M
St 3
and Mw the warping moment (bimoment) due to the tor-sional curvature at the same sections given as
Mw E1CMd2hxdx2
4
In Eq. (3) MPt is the primary twisting moment defined as theresultant of the primary shear stress distribution and MSt isthe secondary twisting moment defined as the resultant ofthe secondary shear stress distribution due to warping
given as [18]
MPt G1Itdhxdx
5a
MSt E1CMd3hxdx3
5b
where
CM XKj1
Ej
E1
ZXj
uPM2
j dXj 6
It XK
j1
Gj
G1 ZXj z2 y2 z
ouPMoy j y
ouPMoz j
!dXj 7
are the warping and torsion constants of the composite crosssection, respectively and uPMy;zj is the primary warpingfunction in the domain X with respect to the center of twistMof the cross section of the bar (see Fig. 1), evaluated fromthe solution of the following Neumann problem [18]:
r2uPMj 0 in Xj j 1; 2; . . . ;K 8
GjouPMon
j
GiouPMon
i
1
2Gj Gi
oq2M
os
j
on Cj j 1; 2; . . . ;K 9
where r2j o2=oy2j o
2=oz2j is the Laplace opera-tor; X [Kj1Xj denotes the whole region of the compositecross section; jand iindices in the boundary conditions de-note jth and ith materials, respectively that have commonboundary Cj (Gj= 0 at a free boundary); qM
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiy2 z2
pis the distance of a point on the boundary Cj from the cen-ter of twist M; (o/on)j denotes the directional derivativenormal to the boundary Cj and (o/os)j denotes differentia-
tion with respect to its arc length s. The vector n normalto the boundary Cj is positive if it points to the exteriorof the Xj region. It is worth here noting that the normalderivatives across the interior boundaries vary discon-tinuously.
It is worthnoting that in the case the origin O of thecoordinates is a point of the y;zplane other than the centerof twist, the warping function with respect to this pointuPOy;zj is first established from the Neumann problem(8) and (9) substituting uPMj by u
POj. Using the evaluated
warping function uPOj; uP
Mj, is then established using thetransformation given by the following equation [19]:
uPMy;zj uPOy;zj zyM yzM c
p 10
where y y yM;z zzM; yM;zM are the coordinates ofthe center of twist Mwith respect to Oyz system of coordi-nates (see Fig. 1) and cP an integration constant.
Substituting Eqs. (5a and b) into Eq. (3) we obtain theexpression of the total twisting moment for the compositeelement with constant cross section as
Mt G1Ith0
X E1CMh000
x 11
The nodal displacement and load vectors given in Eqs. (1)and (2) are related with the 14 14 local stiffness matrix of
the spatial beam element written as
Fig. 2. Torsional curvature of a rectangular and a hollow square cross section.
104 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
4/15
where the kiTn n 1; 2; 3; 4; 5; 6 coefficients are given as[4,20]
kiT1 k0kS; kiT2 k
iT5 k0C 1 13a; b
kiT3 kiT6 k0 CL
1
kS
; kiT4 k0
1
kS L
13c; d
where
k
ffiffiffiffiffiffiffiffiffiffiffiffiG1It
E1CM
r; S sinh e C cosh e 14a; b; c
e Lk; k0
G1It
21 C eS 14d; e
According to the nodal load vector, assuming that thebeam member is subjected to the arbitrarily concentratedor distributed twisting moment mt = mt(x), the evaluationof the twisting and bending (due to the torsional curvature)moment elements of the vector is accomplished using againrelations (4) and (11) employing the derivatives of the angleof twist hx, obtained from the solution of the followingboundary value problem:
E1CMh0000
x G1Ith00
x mt inside the member 15
cx1hx cx2Mt cx3 16a
dx1h0
x dx2Mw dx3 at the member ends x 0;L 16b
for appropriate values of the cxi,dxi (i= 1,2,3) functionsand more specifically for cx1 = dx1 = 1, cx2 = cx3 = dx2 =dx3 = 0 at x = 0,L. It is worth here noting that Eqs.(16a,b) give the most general linear torsional boundaryconditions, including also the elastic support. It is apparentthat all types of the conventional torsional boundary con-ditions (clamped, simply supported, free or guided edge)can be derived from these equations by specifying appro-priately the functions cxi and dxi.
The kilm coefficients (l,m = 1,2,3,5,6, 8,9,10, 12, 13) of
the matrix of Eq. (12) either come from the well known
12 12 stiffness matrix of the classical three-dimensionalframe element, following in this way the classical theoryof beams or result from the so called Timoshenko theoryof beams, which takes into account the effect of sheardeformation. In this investigation the latter theory isemployed leading to the following systems of differentialequations concerning beam bending with respect to ~y and~z axes, respectively
d
d~x
u~z
h~y
M~yQ
~z
26664
37775
0 1 0 1=G1A~z
0 0 1=E1I~y 0
0 0 0 10 0 0 0
26664
37775
u~z
h~y
M~yQ
~z
26664
37775
0
0
0p
~z
26664
37775
17a
d
d~x
u~y
h~z
M~z
Q~y
26664
37775
0 1 0 1=G1A~y
0 0 1=E1I~z 0
0 0 0 1
0 0 0 0
26664
37775
u~y
h~z
M~z
Q~y
26664
37775
0
0
0
p~y
26664
37775
17b
since the corresponding beam components of translation u~zand u~y except for the bending part take into account the
contribution of the shear deformation. Thus, in Eqs.(17a,b) u~z, u~y are the components of total translation dueto bending and shear, h~z, h~y are the components of rotationdue to bending and p
~z p~z~x;p~y p~y~x denote the arbi-trarily distributed transverse loading with respect to ~z and~y axes (see Fig. 1), respectively. Moreover, I~y;I~z are thebending moments of inertia of the composite cross sectionwith respect to ~y and ~z axes, respectively defined as
I~y XKj1
Ej
E1
ZXj
~z2 dXj; I~z XKj1
Ej
E1
ZXj
~y2 dXj 18a; b
The aforementioned contribution of shear deformation
according to Timoshenkos theory is taken into account
12
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 105
http://-/?-http://-/?- -
8/2/2019 3d Beam Element Including Warping and Shear Effects
5/15
through the definitions of the shear areas with respect to ~yand ~z axes given as
A~y j~yA 1
a~yA; A~z j~zA
1
a~zA 19a; b
where j~y;j~z are the shear correction factors, a~y; a~z are the
shear deformation coefficients and A is the cross sectionarea given as
A XKj1
Gj
G1
ZXj
dXj 20
The shear deformation coefficients a~y; a~z corresponding tothe principal centroidal system of axes C~y~z are evaluatedequating the approximate formula of the shear strainenergy per unit length [15]
Uappr a~yQ
2~y
2AG1
a~zQ2~z
2AG121
with the exact one given from
Uexact Xkj1
E1
Ej
ZXj
s~x~z2
j s~x~y2
2GldXj 22
and are obtained as [21]
a~y 1
j~y
A
E1D2
XKj1
ZXj
EjrHj e rHj e dXj
23a
a~z
1
j~z
A
E1D2XKj1
ZXj
Ejr
Hj d r
Uj d d
Xj
23b
where ($)j iy(o/oy) + iz(o/oz) is a symbolic vector withi~y; i~z the unit vectors along ~y and ~z axes, respectively, D isgiven from
D 21 mI~yI~z 24
m is the Poisson ratio of the cross section materials, whichfor the torsionless bending problem is assumed to be com-mon, e and d are vectors defined as
e mI~y~
y2
~z
2
2
i~y mI~y~y~zi~z 25a
d mI~z~y~zi~y mI~z~z2 ~y2
2
i~z 25b
and H~y;~zj; U~y~zj are stress functions, which are eval-uated from the solution of the following Neumann typeboundary value problems [21]
r2Hj 2I~y~y in Xj j 1; 2; . . .K 26a
EjoH
on
j
EioH
on
i
Ej Ein e on Cjj 1; 2; . . . ;K
26b
r2Uj 2I~z~z in Xj j 1; 2; . . . ;K 27a
EjoU
on
j
EioU
on
i
Ej Ein d on Cj j 1; 2; . . . ;K
27b
where n is the outward normal vector to the boundary Cj
(Ei= 0 at a free boundary). In the case of negligible sheardeformations a~z a~y 0. It is also worth here noting thatthe boundary conditions (9), (26b) and (27b) have been de-rived from the following physical considerations:
The traction vector in the direction of the normal vectorn vanishes on the free surface of the beam.
The traction vectors in the direction of the normal vec-tor n on the interfaces separating the j and i differentmaterials are equal in magnitude and opposite indirection.
The displacement components remain continuous across
the interfaces, since it is assumed that the materials arefirmly bonded together.
Thus, taking into account the effect of shear deforma-tion using Eqs. (17a,b), the Kilm coefficients (l, m = 1,2,3,5,6,8,9,10,12,13) of the stiffness matrix of Eq. (12) canbe written as
ki33 ki10;3 k
i3;10 k
i10;10 c~z
12E1I~y
L328a
ki22 ki92 k
i29 k
i99 c~y
12E1I~z
L328b
ki10;5 ki5;10 k
i12;10 k
i10;12 k
i53
ki35 ki12;3 k
i3;12 c~z
6E1I~y
L228c
ki26 ki62 k
i2;13 k
i13;2 k
i69 k
i96
ki9;13 ki13;9 c~y
6E1I~z
L228d
ki55 ki12;12 g~z
4E1I~yL
; ki66 ki13;13 g~y
4E1I~zL
28e; f
ki12;5 ki5;12 w~z
2E1I~yL
; ki13;6 ki6;13 w~y
2E1I~zL
28g; h
where
c~z 1
1 12l~z; c~y
1
1 12l~y
29a; b
g~z
1 3l~z1 12l~z
; g~y
1 3l~y1 12l~y
30a; b
w~z
1 6l~z1 12l
~z
; w~y
1 6l~y1 12l~y
31a; b
and
l~z a~z
E1I~y
G1A
1
L2; l
~y a~yE1I~z
G1A
1
L232a; b
while the coefficients Kilm (l, m = 1,8) come from the classi-
cal three-dimensional frame element as
106 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116
http://-/?-http://-/?- -
8/2/2019 3d Beam Element Including Warping and Shear Effects
6/15
ki11 ki81 k
i18 k
i88
E1A~x
L33
where
A~x XK
j1
Ej
E1 ZXj dXj 34It is worthnoting that the reduction of Eqs. (6), (18a,b),
(34) using the modulus of elasticity E1 and of Eqs. (7) and(20) using the shear modulus G1 of the first material, couldbe achieved using any other material, considering it as ref-erence material.
According to the nodal load vector, assuming that thespan of the beam is subjected to the arbitrarily concen-trated or distributed transverse loading p
~z p~z~x andp
~y p~y~x, the evaluation of the elements concerning theshear forces and bending moments is accomplished usingagain the differential Eqs. (17a,b) employing the derivatives
of the deflections u~z and u~y, obtained from the solution ofthe following boundary value problems for the two casesof transverse loading
E1I~yu0000
~z p~z a~zE1I~y
G1Ap00~z inside the beam 35
c~z1u~z c~z2Q~z c~z3 36a
d~z1h~y d~z2M~y d~z3 at the beam ends x 0;L 36b
E1I~zu0000
~y p~y a~yE1I~z
G1Ap00
~y inside the beam 37
c~y1u~y c~y2Q~y c~y3 38a
d~y1h~z d~y2M~z d~y3 at the beam ends x 0;L 38b
for appropriate values of the c~zi; c~yi and d~zi; d~yi i 1; 2; 3functions and more specifically, for c~z1 d~z1 1,c~y1 d~y1 1 and c~z2 c~z3 d~z2 d~z3 0, c~y2 c~y3 d~y2 d~y3 0 at x = 0 and x = L. It is worth noting thatrelations (36a,b) and (38a,b) describe the most general lin-ear boundary conditions associated with the problem athand including elastic support or restraint.
3. Integral representations numerical solution
3.1. The angle of twist hx and the deflections u~z and u~y
The evaluation of the angle of twist hx is accomplishedusing BEM [22] as this is presented in Sapountzakis andMokos [23]. According to this formulation the integral rep-resentations for the angle of twist and its second derivativewith respect to x
hxx G1It
E1CM
ZL0
d2hxdx2
K4rdz1
E1CM
ZL0
mtxK4rdx
K4rd3hxdx3
K3rd2hxdx2
K2rdhxdx
K1rhx
L0
39a
d2hxx
dx2
G1It
E1CM
ZL0
d2hxx
dx2K2rdz
1
E1CM
ZL0
mtxK2rdx
K2rd3hxx
dx3K1r
d2hxx
dx2
L0
39b
written for the boundary points of the beam x = 0,L to-gether with the two boundary conditions (16a,b) and Eq.(39b) constitute a system of five simultaneous linear equa-tions. These equations, using constant elements to approx-imate the line integrals and a collocation technique, can besolved to yield d2hx/dx
2 inside the beam and hx, dhx/dx,d2hx/dx
2, d3hx/dx3 at the beam ends. It is worth here noting
that the kernels Ki(r), (i= 1,2,3,4) in Eqs. (39a,b) are givenas
K1r 1
2sgnq 40a
K2r
1
2L1 q 40b
K3r 1
4L2jqjjqj 2sgnq 40c
K4r 1
12L32 jqj3 3jqj2 40d
with q = r/I and sgnq = 1, 1 or undefined depending onwhether q is positive, negative or 0, respectively.
Subsequently, using the discretized form of Eq. (39a),the angle of twist hx at any interior point of the beam iscomputed as
hxx fCxgfH00x g
ffAx1g fAx2g fAx3g fAx4gg ffhxg fh0
xg fh00
x g fh000
x ggT
Bx
41
where {Cx} is a 1 N known coefficient row matrix origi-nating from the integration of the kernels along the beam(N is the number of nodal points along the beam axis),fH00x g is a N 1 column matrix including the values ofthe second derivative of the angle of twist hx inside thebeam, {Axi} (i= 1, 2,3,4) are 1 2 known coefficient row
matrices originating from the values of the kernels at thebeam ends, fhxg; fh x
0gfh00x gfh000
x g are 2 1 column matri-ces including the values of the angle of twist hx and itsderivatives at the beam ends and Bx is a known coefficientarising from the twisting loading of the beam mt.
The same numerical procedure can also be used for theevaluation of the deflections u~z and u~y.
3.2. The primary warping function uPMj
The integral representations and the numerical solutionfor the evaluation of the angle of twist hx assume that the
warping CM and torsion It constants given from Eqs. (6)
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 107
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?- -
8/2/2019 3d Beam Element Including Warping and Shear Effects
7/15
and (7), respectively are already established. Eqs. (6) and(7) indicate that the evaluation of the aforementioned con-stants presumes that the primary warping function uPMj atany interior point of the domain X of the cross section ofthe bar is known. Once uPMj is established, CMand It con-stants are evaluated by converting the domain integrals
into line integrals along the boundary using the followingrelations:
C
F
y
z
x
P=40kN
e=b/4P=40kN
e=b/4
L=15.0m
4.0m
3.5m
3.5m
2.0m
2.0m
D
E
y
zSteel: ES
Concrete:EC
b=0.30m
t=0.02m
t=0.02m
h=0.3
0m
e=b/4
P=40kN
y
z
b=0.30m
t=0.02m
t=0.02m
h=0.3
0m
e=b/4
P=40kN
Steel: ES
A
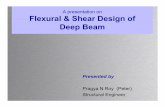
Fig. 3. View (a) and transverse sections of the first, third (b) and of the second (c) span of the composite structure of Example 1.
Table 1Cross section rigidities of the composite structure of Example 1
Cross section ESA(kN)
GSA~z(kN)
ESI~y(kNm2)
GSIt(kNm2)
ESCM(kNm4)
Homogeneous 3,612,000 446,822 55627.6 206.815 368.606Composite 5,796,000 1,464,960 67930.8 24107.4 108.124
Fig. 4. Structural model and loading of the composite structure of Example 1 (supported nodes 1, 9, 23, 31).
108 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
8/15
CM 1
E1
XKj1
ZCj
B EjouPMon j
Ei
ouPMon
i
ds
on Cjj 1; 2; . . . ;K 42a
It 1
G1
XKj1
ZCj
Gj Gi zy2 yuPMj
cos b
h
z2y
zuP
Mj sin bids on C
jj
1;
2;. . .
;K
42b
Eqs. (42a,b) Cj (j= 1,2, . . . , K), is an interface between re-gions Xj and Xi, while Ej = Gj= 0 in the case Cj is a freeboundary. Moreover, in these equations the normal n tothe boundary Cj points to the exterior of the region Xjand Cj is traveled only once, while (B(y, z))j is a fictitiousfunction defined as the solution of the following Neumannproblem:
r2Bj uP
Mj in Xjj 1; 2; . . . ;K 43
EjoB
on Ei oB
on 0 on Cjj 1; 2; . . . ;K 44
Finally, Eq. (10) can give the primary warping functionuPMj with respect to the center of twist M, if the warpingfunction uPOj with respect to the origin of the coordinatesis first established. The evaluation of the warping functionuPOj and the fictitious function (B(y,z))j is accomplishedusing BEM as this is presented in Sapountzakis [24] and
in Sapountzakis and Mokos [18], respectively.
3.3. The stress functions (H(y,z))j and (U(y,z))j
The evaluation of the stress functions (H(y,z))j and(U(y,z))j is accomplished using BEM as this is presentedin Mokos and Sapountzakis [21].
Moreover, since the torsionless bending problem ofbeams is solved by the BEM, the domain integrals in Eqs.(18a,b), (20) and (23a,b) have to be converted to boundaryline integrals, in order to maintain the pure boundary char-acter of the method. This can be achieved using integrationby parts, the Gauss theorem and the Green identity. Thus,for the bending moments of inertia and the cross sectionarea Eqs. (18a,b), (20) can be written as
I~y 1
E1
XKj1
ZCj
Ej Ei~y~z2 cosb ds 45a
I~z 1
E1
XKj1
ZCj
Ej Ei~z~y2 sin b ds 45b
A 1
2G1
XKj1
ZCj
Gj Gi~ycos b ~zsinb ds 45c
while the shear deformation coefficients a~y and a~z are ob-tained from the relations
a~y A
E1D2
4v 2I~yIH~y 1
4v2I2
~yIed IHe
46a
a~z A
E1D2
4v 2I~zIH~z 1
4v2I2
~zIed IUd
46b
where
IHe XKj1
ZCj
Ej EiHjn e ds 47a
IUd XK
j1ZCj
Ej EiHjn d ds 47b
Ied XKj1
ZCj
Ej Ei ~y4~zsinb ~z4~ycosb
2
3~y2~z3 sinb
ds
47c
IH~y 1
6
XKj1
ZCj
Ej Ei2I~y~y4~zsinb
3Hj cosb ~yn e~y2 ds 47d
IU~z 1
6
XKj1
ZCj
Ej Ei2I~z~z4~ycosb
3Uj sinb ~zn d
~z
2
ds 47e
-0.022
-0.016
-0.010
-0.004
0.002
0.008
0.014
0.020
-0 .15 -0.10 -0.05 0.00 0.05 0.1 0 0.15
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
P 2Mmax 0.02197m =
-0.15 -0.10 -0.05 0.00 0.05 0.10 0.15
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
-0.014
-0.010
-0.006
-0.002
0.002
0.006
0.010
P 2Mmax 0.01226m =
Fig. 5. Distribution of the primary warping function uPM of the homo-geneous (a) and the composite (b) cross section of Example 1.
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 109
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
9/15
4. Numerical examples
On the basis of the analytical and numerical procedurespresented in the previous sections, a computer program hasbeen written and representative examples have been studiedto demonstrate the efficiency, wherever possible the accu-racy and the range of applications of the developedmethod. The appropriate number of beam elements resultsas the minimum one able to describe accurately the geom-etry and loading of the structure (the reason for theemployed beam elements in examples 1 and 3 is the clearrepresentation of the deflection lines and moment diagrams
in these examples). In all the examples treated 300 constantboundary elements were employed for the discretization ofthe boundary of the cross section.
Example 1. In order to demonstrate the efficiency and therange of applications of the developed method in our firstexample a three span of L = 4m + 7m + 4m = 15m com-posite beam resting on four simply supported torsional-bending boundary conditions and subjected in eccentricloading, as shown in Fig. 3 has been studied. The crosssection of the midspan of the structure is a homogeneousone consisting of an I-steel (ES = 2.1 10
8 kPa, v = 0.20)beam, while the cross section of the first and the third spansis a composite one consisting of the aforementioned I-steelbeam (reference material) filled with concrete (EC =3.0 107 kPa, v = 0.20). In Table 1 the rigidities of thehomogeneous and the composite cross sections and inFig. 4 the structural model and the loading of thecomposite structure are presented. In Fig. 5 the contourlines of the primary warping function uPM in the interior ofboth the homogeneous and the composite cross sectionsare presented. From this figure it follows that warping isnot constant along the thickness of the cross section wallsas it is assumed in Thin Tube Theory for thin walledbeams. Moreover, in Fig. 6 the twisting moment diagramsof the composite beam and in Table 2 the support reactions
including (14 14) or ignoring (12 12) the torsional
Fig. 6. Twisting moment diagrams of the composite structure ofExample 1, (a) including (14 14) or (b) ignoring (12 12) the torsional curvature of themembers.
Table 2Support reactions of the composite beam of Example 1
Support 14 14 & 12 12 memberstiffness matrix
Including & Ignoring sheardeformation
Includingsheardeformation
Ignoringsheardeformation
14 14memberstiffnessmatrix
12 12memberstiffnessmatrix
Reaction Rz (kN) Reaction Rxx (kNm)
A 0.5768E+01 0.5748E+01 0.3708E+00 0.0000E+00B 0.2374E+02 0.2368E+02 0.1874E+01 0.1500E+01D 0.5135E+02 0.5145E+02 0.3623E+00 0.0000E+00
F 0.1068E+02 0.1063E+02 0.1865E+01 0.1500E+01
110 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
10/15
curvature of the members are presented. From theobtained results the significant role of the torsionalcurvature is remarkable, while in this case the shear
deformation effect does not have any influence since shearand torsion in this example are independent.
Example 2. A composite beam of length L = 80.0m, withcurved plan view of a quadratic parabola (Fig. 7a),clamped at its end points A, Eand inhibiting the deflectionat points B, D, having a cross section consisting of a con-crete (EC = 3.0 10
7 kPa, m = 0.20) rectangular part (refer-ence material) stiffened by steel beams (ES = 2.1 10
8 kPa,m = 0.20), forming either a closed box shaped section(Fig. 7b) or an open P-section (Fig. 7c), subjected to a ver-
tical load P= 600kN at point C (Fig. 7a) has been studied.In Table 3 the constants of the closed and the open crosssections and in Fig. 8 the structural model and the loadingof the composite structure are presented. in Fig. 9 theboundary distributions of the primary warping functionuPM of the composite beam with the closed cross sectionare presented as compared with those of the beam withthe open cross section. The advantages of the closed crosssection beam are easily verified. Moreover, in Table 4 themaximum deflections of the composite beam and in Figs.10 and 11 the deflections along the composite beam ofthe closed and open form cross section, respectively arepresented as compared with those obtained taking intoaccount or ignoring both the shear deformation effectand the torsional curvature. From the obtained results,both the negligible influence in the closed cross sectionand the significant role in the open one of the torsional cur-vature and the remarkable influence of the shear deforma-tion effect in all cases are pointed out. In Fig. 12 thebending moment diagrams of the composite beam withopen cross section, taking into account the shear deforma-tion effect and including (14 14) or ignoring (12 12) thetorsional curvature of the members and in Fig. 13 thebending moment diagram due to the torsional curvature
L=80.00m
Quadratic parabolaAE
h1=20.00m
2
1
, 0,1( 4 4 )
x L
y h
=
= +
.
String length LDE: 91.82m
C
P=600kN
.
20.0m 20.0m
.BD
..15.00m x
y
15.00m
A B
t
t
0.25 0.25
0.750.75 0.750.752.40
5.50m
1.50
0.20
3.00
1.4
945m
7.00m
Steel:ES
Concrete:EC
t=0.05m
C: Centroid
M: Center of twist
0.2814m
A B
t
0.25 0.25
0.750.75 0.750.752.40
5.50m
1.50
0.20
3.00
1
.7464m
7.00m
Steel:ES
Concrete:EC
t=0.05m
C: Centroid
M: Center of twist
2.6016m
A B
Fig. 7. Plan view (a) and transverse sections of the closed (b) and open (c)beam of Example 2.
Table 3Cross section constants of the composite structure of Example 2
Cross section A (m2) A~z (m2) I~y (m
4) It (m4) CM (m
6)
Closed 5.74 1.8691 10.0374 12.7531 1.93659Open 4.90 1.9646 7.9123 0.60625 33.4857
Fig. 8. Structural model and loading of the composite structure ofExample 2 (clamped nodes 1, 61, nodes with internal support 16, 46, loaded node 31).
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 111
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
11/15
are presented. It is worth here noting the magnitude of thediscrepancy (22.5%) of the maximum normal stress at sec-tion Cof the composite beam with open cross section tak-ing into account the shear deformation effect and including(14 14) (maxrx = 16.86 10
3 kpa) or ignoring (12 12)(maxrx = 13.07 10
4 kpa) the torsional curvature of themembers. This discrepancy necessitates the inclusion of thisadditional degree of freedom, especially in beams with
open form cross sections.
Fig. 9. Distribution of the primary warping function uPM of the closed (a) and open (b) cross section of Example 2.
Table 4Maximum deflections of the composite beam of Example 2
Beams 14 14 member stiffnessmatrix
12 12 member stiffnessmatrix
Includingsheardeformation
Ignoringsheardeformation
Includingsheardeformation
Ignoringsheardeformation
Close 0.1822 0.1464 0.1823 0.1465Open 0.2640 0.2272 0.3600 0.3207
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0
Beam length (m)
-0.20
-0.18
-0.15
-0.13
-0.10
-0.08
-0.05
-0.03
0.00
0.03
Deflection(cm)
Closed Cross section (14x14 & 12x12 Matrix)
Without Shear Deformation
Including Shear Deformation
Fig. 10. Deflections along the composite beam with closed cross section of
Example 2.
0 .0 1 0.0 2 0.0 3 0.0 4 0.0 5 0.0 6 0.0 7 0.0 8 0.0 9 0.0 10 0.0
Beam length (m)
-0.38
-0.35
-0.32
-0.30
-0.27
-0.25
-0.22
-0.20
-0.17
-0.15
-0.12
-0.10
-0.07
-0.05
-0.02
0.00
0.03
0.05
Deflection(cm)
Open Cross section
Without Shear Deformation (12x12 Matrix)
Without Shear Deformation (14x14 Matrix)
Including Shear Deformation (12x12 Matrix)
Including Shear Deformation (14x14 Matrix)
Fig. 11. Deflections along the composite beam with open cross section ofExample 2.
112 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
12/15
Example 3. A clamped slab and beam structure of lengthL = 20.0m of a composite cross section consisting of threeconcrete C35/45-I beams (Ec35 = 3.35 10
7 kpa, m = 0.20)joined on top with a concrete C20/25 (reference material)
slab (Ec20 = 2.90 107
kpa, m = 0.20), at their ends with a
transverse concrete C20/25 beam of thickness 0.60m andat their midspan with a transverse concrete C20/25 beamof thickness 0.30m, as shown in Fig. 14 has been studied.In Table 5 the constants of the transverse and the longitu-
dinal cross sections and in Fig. 15 the structural model and
Fig. 12. Bending moment diagrams of the composite beam of Example 2 with open cross section (a) including (14 14) or (b) ignoring (12 12) thetorsional curvature.
Fig. 13. Bending moment diagram of the composite beam of Example 2 with open cross section due to the torsional curvature.
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 113
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
13/15
the loading of the composite structure are presented. It isworth here noting that the constants of the members ofthe grid are estimated as the corresponding part of thewhole cross section taking into account the ratio of thearea of the member with respect to the area of the wholecross section. In Figs. 16 and 17 the deflection surfacesand the bending moment diagrams together with theirmaximum values are presented, respectively taking intoaccount the shear deformation effect and including(14 14) or ignoring (12 12) the torsional curvature of
the grid members. Moreover, in Table 6 the maximumdeflections of the longitudinal beams I, II, III (Fig. 15)are presented as compared with those obtained taking intoaccount or ignoring both the shear deformation effect andthe torsional curvature. From the obtained results both the
significant role of the torsional curvature and the influenceof the shear deformation effect are remarkable.
5. Concluding remarks
In this paper a boundary element method is developedfor the construction of the 14 14 stiffness matrix andthe nodal load vector of a member of arbitrary homoge-neous or composite cross section taking into account bothwarping and shear deformation effects. The compositemember consists of materials in contact each of which
1.20m
0.10m0.05m0.10m
0.15m
0.20m
0.60m
0.50m
0.20m
0.10mC: Centroid
M: Center of twist
0.5926.m
0.8192.m
3.60m
1.30m
1.20m
0.10m
0.60mC20/25
C35/45
4.80m
L=20.0m
C: Centroid
M: Center of twist0.20m
0.30m 0.60m
1.30m
C20/25
1.0102m
0.4799m
Fig. 14. Transverse (a) and longitudinal (b) sections of the composite slab and beam structure of Example 3.
Table 5Cross section constants of the composite structure of Example 3
Cross section A (m2) A~z (m2) I~y (m
4) It (m4) CM (m
6)
Transverse 2.14284 0.81179 0.41685 0.04969 0.49530Longitudinal 5.65000 0.19170 0.67325 0.21424 40.12990
62
42
31
11
5330
12
22
43
32
21
63
23
4445
24
34
56
78 9
1012
1314
1516
1718
1920
2526
2728
29 52
46 4748
4950
51
3334
3536
3738
3940
41
5455
5657
5859
6061
20m
1.2m1.2m
P=100kNP
PPP
P
Beam III
Beam I
Beam II
Fig. 15. Structural model and loading of the composite slab and beam structure of Example 3.
114 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
14/15
can surround a finite number of inclusions. To account for
shear deformations, the concept of shear deformation coef-
ficients is used. Seven boundary value problems are formu-
lated and solved employing a pure BEM approach, that is
Fig. 16. Deflection surfaces and corresponding maximum values of the composite slab and beam structure of Example 3, (a) including (14 14) or (b)ignoring (12 12) the torsional curvature of the grid members.
Fig. 17. Bending moment diagrams of the composite slab and beam structure ofExample 3, (a) including (14 14) or (b) ignoring (12 12) the torsionalcurvature of the grid members.
E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116 115
-
8/2/2019 3d Beam Element Including Warping and Shear Effects
15/15
only boundary discretization is used. The main conclusionsthat can be drawn from this investigation are
(a) The presented numerical technique is well suited forcomputer aided analysis for beams of arbitraryhomogeneous or composite cross section, subjectedto any linear boundary conditions and to an arbi-trarily distributed or concentrated transverse or twist-ing loading.
(b) The discrepancy of the deflections and the internalstress resultants arising from the ignorance of thewarping degrees of freedom at the ends of a memberand the magnitude of the normal stresses due towarping necessitate the utilization of the 14 14member stiffness matrix, especially for beams withopen form cross sections.
(c) The remarkable influence of the shear deformationeffect in the deflection and the internal stress resul-tants is pointed out.
(d) The advantages of a box shaped closed cross sectionbeam subjected in torsional loading compared withthat of an open one are easily verified.
(e) The magnitude of the evaluated normal stresses due towarping necessitates the consideration of these addi-tional normal stresses, especially near the restrainededges.
(f) Warping is not constant along the thickness of thecross section walls as it is assumed in Thin Tube The-ory for thin walled beams.
(g) The developed procedure retains the advantages of aBEM solution over a pure domain discretization
method since it requires only boundary discretization.
Acknowledgements
Financial support of this research was provided by theIraklitos Research Fellowships with Priority to Basic Re-
search, an EU funded project in the special managingauthority of the Operational Program in Education andInitial Vocational Training.
References
[1] Murin J, Kutis V. 3D-beam element with continuous variation of thecross-sectional area. Comput Struct 2002;80:32938.
[2] Murn J. 3D beam element with changing cross sectional area. EngMech 1999;1:2535 [in Slovak].
[3] Murn J. Beam element with varying cross-section satisfying local andglobal equilibrium conditions. Mech Eng 1998;49(3):20823 [inSlovak].
[4] Reilly RJ. Stiffness analysis of grids including warping. ASCE J StructDiv 1972;7:151123.
[5] Barsoum RS, Gallagher RH. Finite element analysis of torsional-flexural stability problems. Int J Numer Methods Eng 1970;2:33552.
[6] Waldron P. Elastic analysis of curved thin-walled girders includingthe effect of warping restraint. Eng Struct 1985;7:93104.
[7] Waldron P. Stiffness analysis of thin-walled girders. ASCE J StructDiv 1986;6:136684.
[8] Yang Y, McGuire W. A procedure for analyzing space frames withpartial warping restraint. Int J Numer Methods Eng 1984;20:137798.
[9] Ahmed MZ, Weisgerber FE. Torsion constant for matrix analysis ofstructures including warping effect. Int J Solids Struct 1996;33(3):361374.
[10] Bach C, Baumann R. Elastizitat und Festigkeit. 9th ed. Ber-lin: Springer; 1924.
[11] Stojek D. Zur Schubverformung im Biegebalken. Zeitschrift furAngewandte Mathematik Mech 1964;44:3936.
[12] Timoshenko SP, Goodier JN. Theory of Elasticity, 3rd ed. NewYork: McGraw-Hill.
[13] Cowper GR. The Shear Coefficient in Timoshenkos Beam Theory. JAppl Mech, ASME 1966;33(2):33540.
[14] Schramm U, Kitis L, Kang W, Pilkey WD. On the shear deformation
coefficient in beam theory. Finite Elements Anal Des 1994;16:14162.[15] Schramm U, Rubenchik V, Pilkey WD. Beam stiffness matrix basedon the elasticity equations. Int J Numer Methods Eng 1997;40:211232.
[16] Stephen NG. Timoshenkos shear coefficient from a beam subjectedto gravity loading. ASME J Appl Mech 1980;47:1217.
[17] Hutchinson JR. Shear coefficients for Timoshenko beam theory.ASME J Appl Mech 2001;68:8792.
[18] Sapountzakis EJ, Mokos VG. Warping shear stresses in nonuniformtorsion of composite bars by BEM. Comput Methods Appl MechEng 2003;192:433753.
[19] Windisch E. Eine Numerische Methode zur Losung des Torsions-problems I. Acta Mech 1967;4:1919.
[20] Friemann H. Schub und torsion in gerade Staben. Dusseldorf: Wer-ner-Verlag; 1993.
[21] Mokos VG, Sapountzakis EJ. A BEM solution to transverse shearloading of composite beams. Int J Solids Struct 2005;42:326187.[22] Katsikadelis JT. Boundary Elements: Theory and Applica-
tions. Amsterdam-London: Elsevier; 2002.[23] Sapountzakis EJ, Mokos VG. Nonuniform torsion of composite bars
by boundary element method. J Eng Mech, ASCE 2001;127(9):94553.
[24] Sapountzakis EJ. Solution of nonuniform torsion of bars by anintegral equation method. Comput Struct 2000;77:65967.
Table 6Maximum deflections of the longitudinal beams I, II, III of the compositestructure of Example 3
Beams 14 14 member stiffnessmatrix
12 12 member stiffnessmatrix
Includingshear
deformation
Withoutshear
deformation
Includingshear
deformation
Withoutshear
deformation
I 0.2183 0.2020 0.1254 0.1133II 0.2404 0.2031 0.2426 0.2035III 0.2475 0.2038 0.3382 0.2921
116 E.J. Sapountzakis, V.G. Mokos / Computers and Structures 85 (2007) 102116