
361-06: 2D Transformations - Computing Science - … Transformations CMPT 361 Introduction to...
32
© Machiraju/Zhang/Möller 2D Transformations CMPT 361 Introduction to Computer Graphics Torsten Möller
Transcript of 361-06: 2D Transformations - Computing Science - … Transformations CMPT 361 Introduction to...

© Machiraju/Zhang/Möller
2D Transformations
CMPT 361Introduction to Computer Graphics
Torsten Möller

© Machiraju/Zhang/Möller2
Graphics Pipeline
Hardware
Modelling Transform Visibility
Illumination +Shading
ColorPerception,Interaction
Texture/Realism

© Machiraju/Zhang/Möller3
Reading• Chapter 3 of Angel• Chapter 5 of Foley, van Dam, …

© Machiraju/Zhang/Möller4
Schedule• Geometry basics• Affine transformations• Use of homogeneous coordinates• Concatenation of transformations• 3D transformations• Transformation of coordinate systems• Transform the transforms• Transformations in OpenGL
© Machiraju/Zhang/Möller5
Basic transformations• The most basic ones
– Translation– Scaling– Rotation– Shear– And others, e.g., perspective transform, projection, etc.
• Basic types of transformations– Rigid-body: preserves length and angle– Affine: preserves parallel lines, not angles or lengths– Free-form: anything goes

© Machiraju/Zhang/Möller6
Translation in 2D
P � = P + T
x� = x + dx
y� = y + dy
�x�
y�
⇥=
�xy
⇥+
�dx
dy
⇥

© Machiraju/Zhang/Möller7
Scaling in 2D
�x�
y�
⇥=
�sx 00 sy
⇥�
�xy
⇥
P � = S � P
x� = sx � x
y� = sy � y• Uniform sx = sy
• Non-uniform sx ⇥= sy

© Machiraju/Zhang/Möller
• Positive angles:counterclockwise
• For negative angles
8
Rotation about origin
P � = R� Px� = x cos(�)� y sin(�)y� = x sin(�) + y cos(�)
cos(��) = cos(�)sin(��) = � sin(�)
�x�
y�
⇥=
�cos(�) � sin(�)sin(�) cos(�)
⇥ �xy
⇥

© Machiraju/Zhang/Möller
• Make use of polar coordinates:
9
Derivation of rotation matrix
x = r cos(�)y = r sin(�)
x = r cos(⇥ + �)y = r sin(⇥ + �)
x� = r cos(⇥ + �)= r cos(⇥) cos(�)� r sin(⇥) sin(�)= x cos(�)� y sin(�)
y� = r sin(⇥ + �)= r sin(⇥) cos(�) + r cos(⇥) sin(�)= y cos(�) + x sin(�)
(r, �)� (x, y)
(r, �)� (x, y)

© Machiraju/Zhang/Möller10
Shearing in 2D
P � = SHy � P
P � = SHx � P�
x�
y�
⇥=
�1 a0 1
⇥ �xy
⇥
�x�
y�
⇥=
�1 0b 1
⇥ �xy
⇥
x� = x + ay
y� = y

© Machiraju/Zhang/Möller11
Schedule• Geometry basics• Affine transformations• Use of homogeneous coordinates• Concatenation of transformations• 3D transformations• Transformation of coordinate systems• Transform the transforms• Transformations in OpenGL

© Machiraju/Zhang/Möller12
Homogeneous coordinates• Only translation cannot be expressed as
matrix-vector multiplications• But we can add a third coordinate –
Homogeneous coordinates for 2D points– (x, y) turns into (x, y, W)– if (x, y, W) and (x', y', W’ ) are multiples of one
another, they represent the same point– typically, W ≠ 0. – points with W = 0 are points at infinity

© Machiraju/Zhang/Möller13
2D Homogeneous Coordinates• Cartesian coordinates of the homogenous point
(x, y, W): x/W, y/W (divide through by W)• Our typical homogenized points: (x, y, 1) • Connection to 3D?
– (x, y, 1) represents a 3Dpoint on the plane W = 1
– A homogeneous point is aline in 3D, through the origin

© Machiraju/Zhang/Möller14
Transformation in homogeneous coordinates
• General form of affine (linear) transformation
• E.g., 2D translation in homogeneous coordinates

© Machiraju/Zhang/Möller
• 2D line equation– Duality of 3D points to a line
• 3D plane equation:– Duality of 4D points to a plane
• Homog. Coords in 1D?
15
Homogeneous Coords (3)
ax + by + cx + d = 0
�a b c d
⇥
⇤
⌥⌥⇧
xyz1
⌅
��⌃ = 0
ax + by + c = 0
�a b c
⇥⇤
⇧xy1
⌅
⌃ = 0

© Machiraju/Zhang/Möller16
Basic 2D transformations

© Machiraju/Zhang/Möller17
Inverse of transformations• Inverse of T(dx, dy) = T(−dx, −dy)
• R(θ)−1 = R(−θ)
• S(sx, sy)−1 = S(1/sx, 1/sy)
• Sh(ax)−1 = Sh(−ax)
T(−dx, −dy) = T(dx, dy)−1

© Machiraju/Zhang/Möller18
Schedule• Geometry basics• Affine transformations• Use of homogeneous coordinates• Concatenation of transformations• 3D transformations• Transformation of coordinate systems• Transform the transforms• Transformations in OpenGL

© Machiraju/Zhang/Möller19
Compound transformations• Often we need many transforms to build
objects (or to “direct” them)– e.g., rotation about an arbitrary point/line?
• Concatenate basic transforms sequentially• This corresponds to multiplication of the
transform matrices, thanks to homogeneous coordinates

© Machiraju/Zhang/Möller20
Compound translation• What happens when a point goes through
T(dx1, dy1) and then T(dx2, dy2)?
• Combined translation: T(dx1+dx2, dy1+dy2)
Concatenation of transformations: matrix multiplication
�
⇤1 0 dx2
0 1 dy2
0 0 1
⇥
⌅
�
⇤1 0 dx1
0 1 dy1
0 0 1
⇥
⌅ =
�
⇤1 0 dx1 + dx2
0 1 dy1 + dy2
0 0 1
⇥
⌅

© Machiraju/Zhang/Möller21
Compound rotation• What happens when a point goes through
R(θ) and then R(φ)?• Combined rotation: R(θ + φ)
• Scaling or shearing (in one direction) is similar• These concatenations are commutative

© Machiraju/Zhang/Möller22
Commutativity• Transformations that do commute:
– Translate – translate– Rotate – rotate (around the same axis)– Scale – scale– Uniform scale – rotate– Shear in x (y) – shear in x (y), etc.
• In general, the order in which transformations are composed is important
• After all, matrix multiplications are not commutative

© Machiraju/Zhang/Möller23
Commutativity• the order in which we compose matrices is
important: matrix multiplication does not commute
x
y
z
x
y
z x
y
z
x
y
z x
y
z
X then Z
Z then X
© Machiraju/Zhang/Möller24
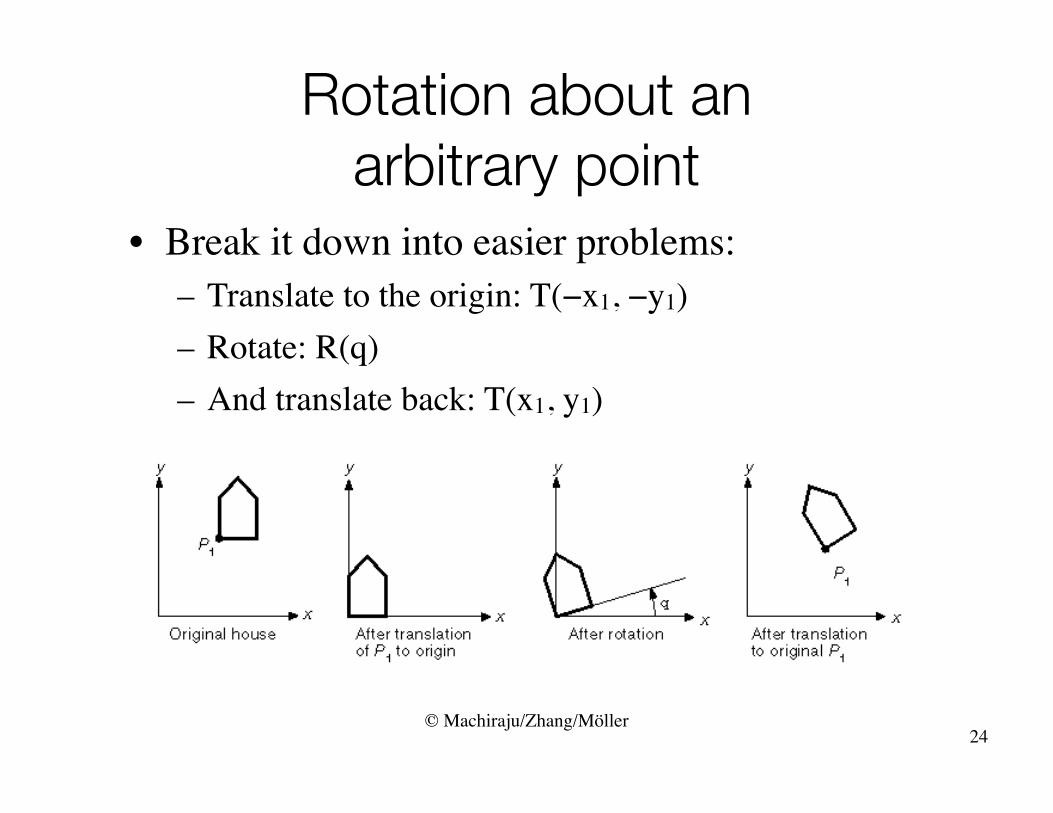
Rotation about an arbitrary point
• Break it down into easier problems:– Translate to the origin: T(−x1, −y1)– Rotate: R(q)– And translate back: T(x1, y1)
© Machiraju/Zhang/Möller25
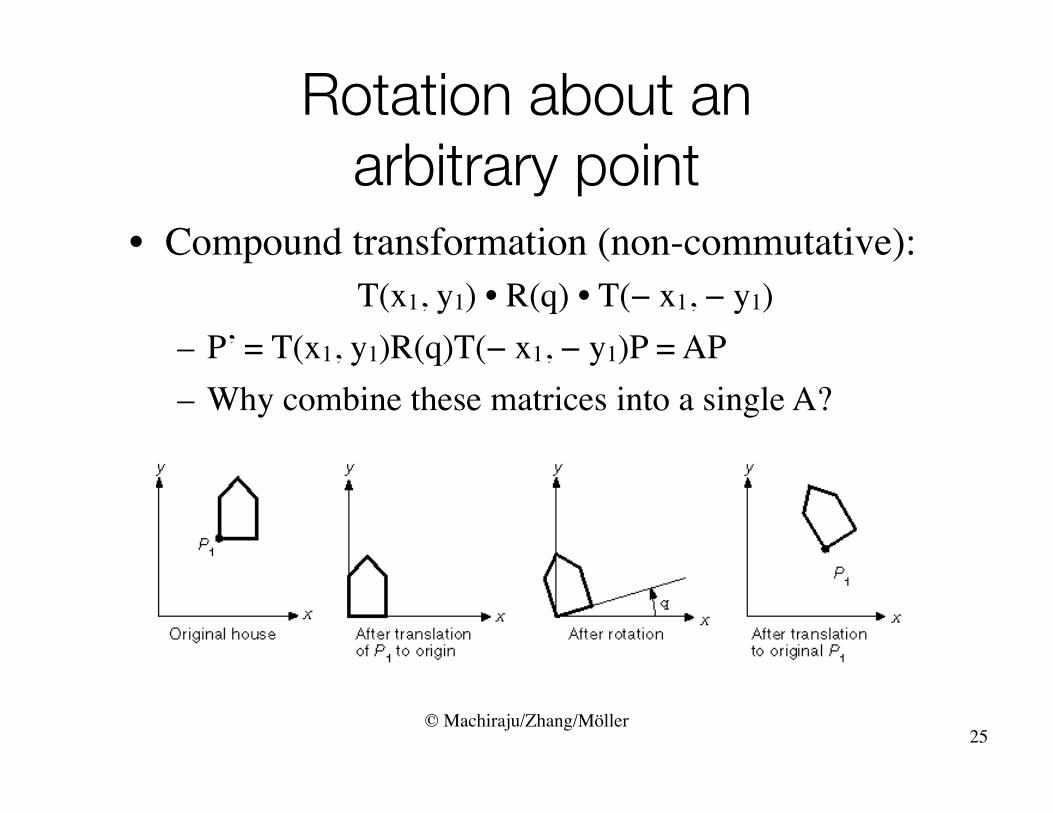
Rotation about an arbitrary point
• Compound transformation (non-commutative):T(x1, y1) • R(q) • T(− x1, − y1)
– P’ = T(x1, y1)R(q)T(− x1, − y1)P = AP– Why combine these matrices into a single A?

© Machiraju/Zhang/Möller26
Another example• Compound transformation:
T(x2, y2) • R(90o) • S(sx, sy) • T(−x1, −y1)

© Machiraju/Zhang/Möller27
Rigid-body transformation• A transformation matrix
• where the upper 2 × 2 submatrix is orthonormal, preserves angles and lengths– called rigid-body transformation– any sequence of translation and rotation give a
rigid-body transformation
© Machiraju/Zhang/Möller28
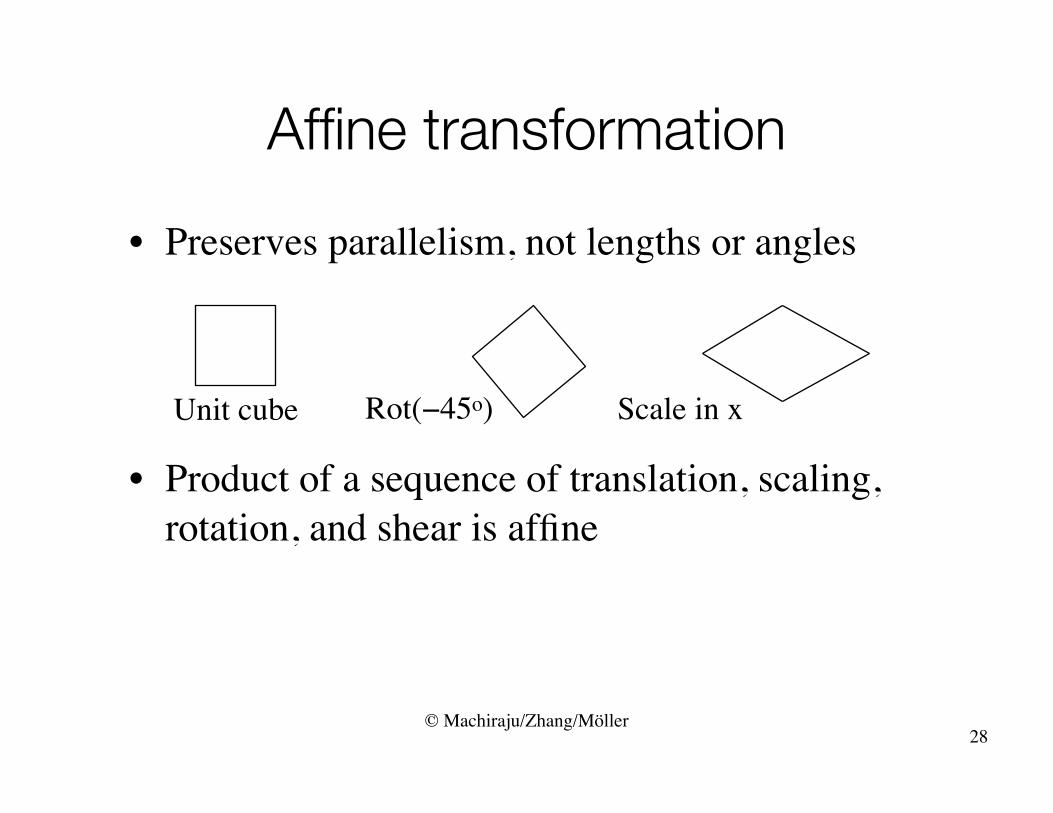
Affine transformation• Preserves parallelism, not lengths or angles
• Product of a sequence of translation, scaling, rotation, and shear is affine
Unit cube Rot(−45o) Scale in x

© Machiraju/Zhang/Möller29
Types of Transforms• Continuous/Discrete, one to one ; invertible• Classification
– Euclidean (preserves angles)• translation, rotation, uniform scale
– Affine (preserves parallel lines)• Euclidean plus non-uniform scale, shearing
– Projective (preserves lines)– Isometry (preserves distance)
• Reflection, rigid body motion– Nonlinear (lines become curves)
• Twists, Bends, warps, morphs

© Machiraju/Zhang/Möller30
Window-To-Viewport Transformation
• Important example of compound transform• “World coords”: space users work in• need to map world to the screen
– window in world-coordinate space and– viewport in screen coordinate space

© Machiraju/Zhang/Möller
• one can specify non-uniform scaling• results in distorted images• What property of window and viewport
indicates whether the mapping will distort the images?
31
Window-To-Viewport Transformation (2)

© Machiraju/Zhang/Möller32
Window-To-Viewport Transformation (3)
• Specify transform in matrix form
Mwv = T
�umin
vmin
⇥⇥ S
� umax�uminxmax�xminvmax�vminymax�ymin
⇥⇥ T
��xmin
�ymin
⇥


















