PowerSource User Guide 20080708 - Muskegon Area Intermediate
date post
19-Dec-2015Category
view
303download
2
3 levels
•Basic User Tasks•Intermediate User Tasks•Advanced User Tasks
Basic User Tasks - Patient
How to Use the GUI How to Start Up the chair How to Shut down the chair How to Recharge the chair How to Move the Chair By Pushing How to Re-enable the Motors After E-Stop
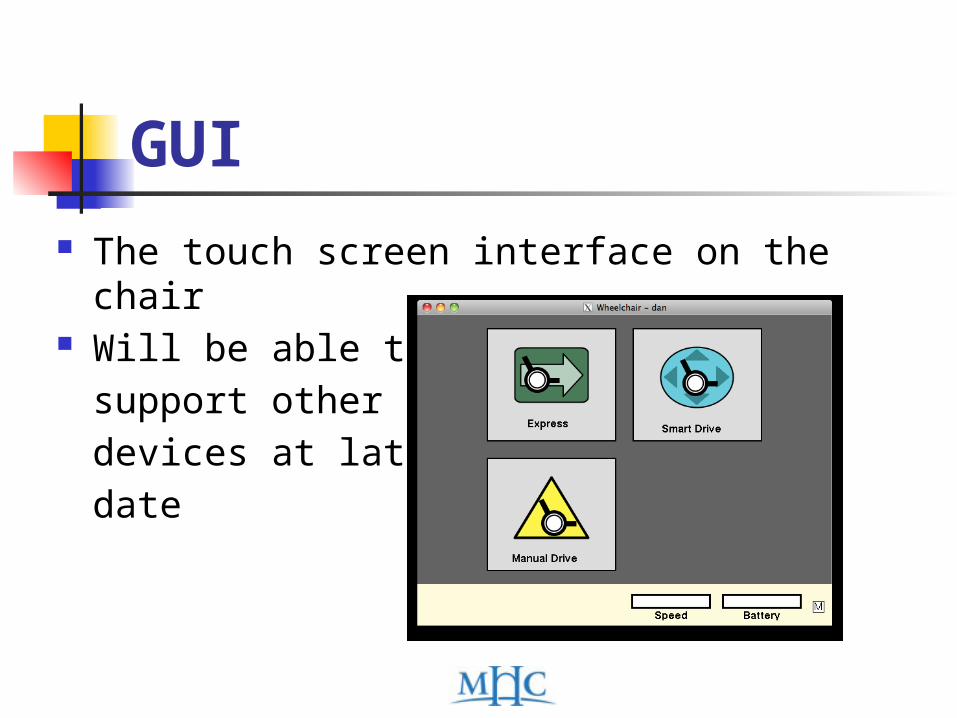
GUI The touch screen interface on the chair Will be able to
support other devices at later date
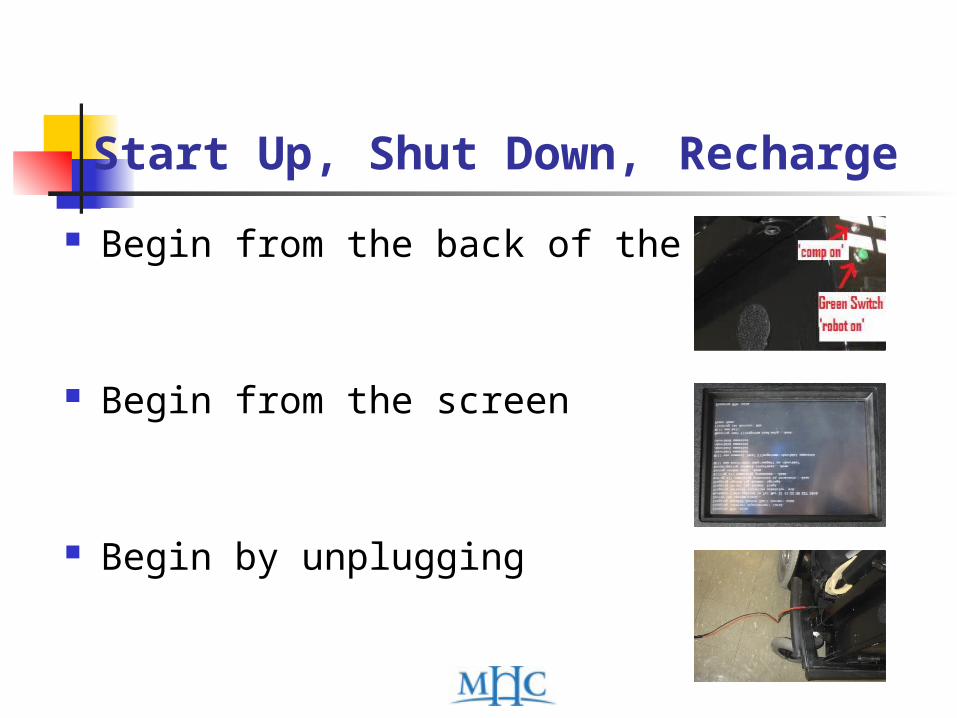
Start Up, Shut Down, Recharge
Begin from the back of the chair
Begin from the screen
Begin by unplugging
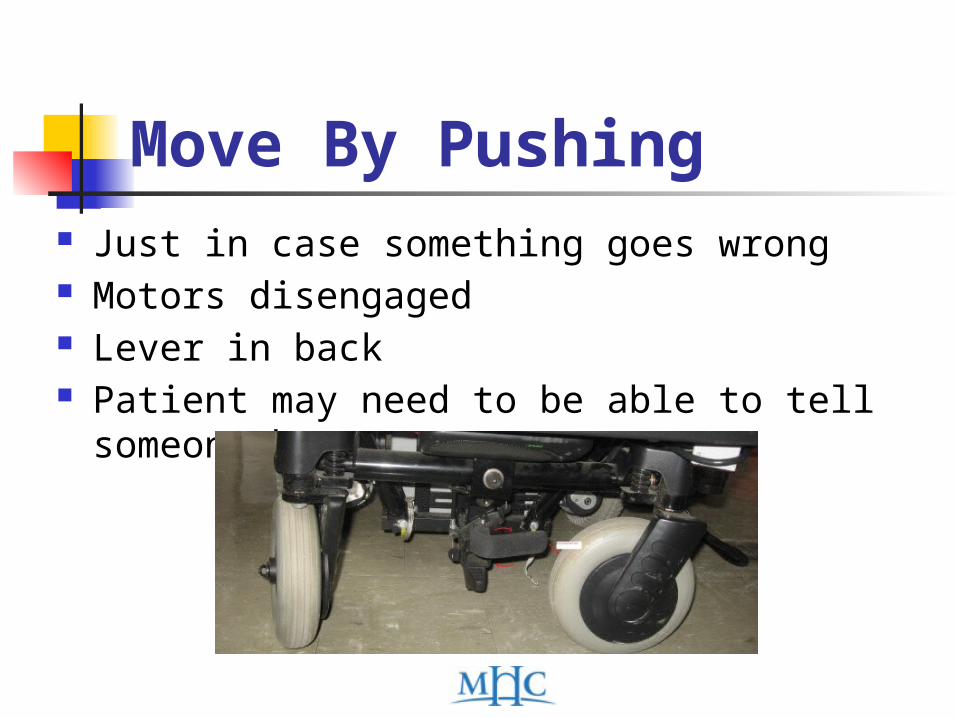
Move By Pushing Just in case something goes wrong Motors disengaged Lever in back Patient may need to be able to tell
someone how
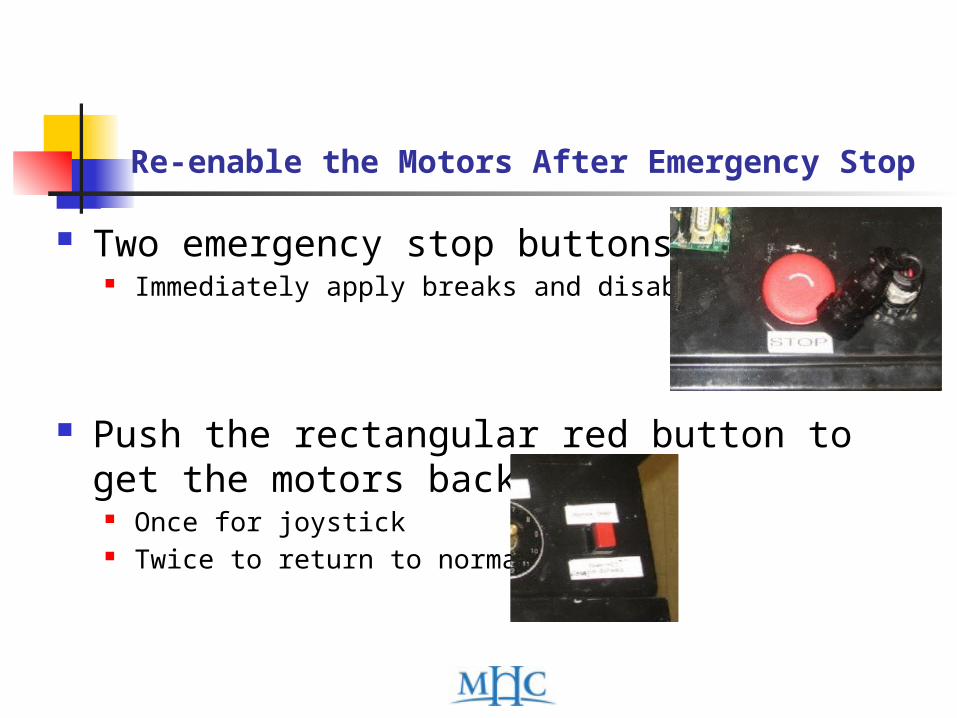
Re-enable the Motors After Emergency Stop
Two emergency stop buttons Immediately apply breaks and disable motors
Push the rectangular red button to get the motors back
Once for joystick Twice to return to normal
Intermediate User Tasks -Doctor/Therapist
How to Connect With X11 How to Use Xming How to Connect to the Wheelchair from a PC How to Open MobileEyes How to Localize the Robot How to Drive the Robot From MobileEyes How to Change Maps in MobileEyes How to Enable/Disable Goals on the Chair’s
Interface
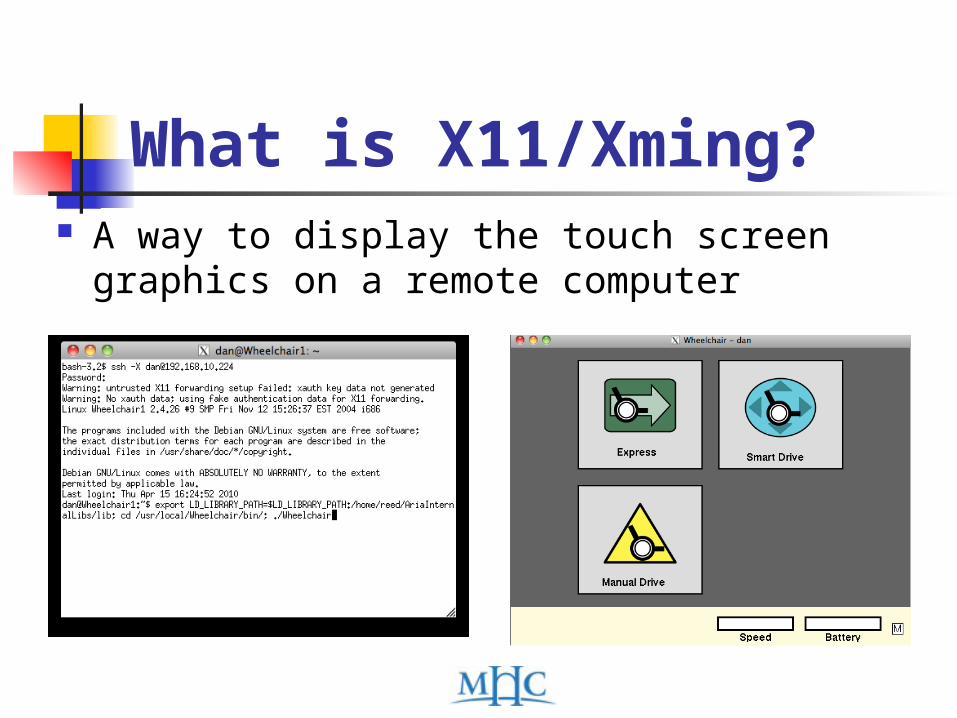
What is X11/Xming? A way to display the touch screen graphics
on a remote computer

Connect With X11 and Use Xming
Useful to be able to control the chair remotely as if in chair
Ex: For choosing goals
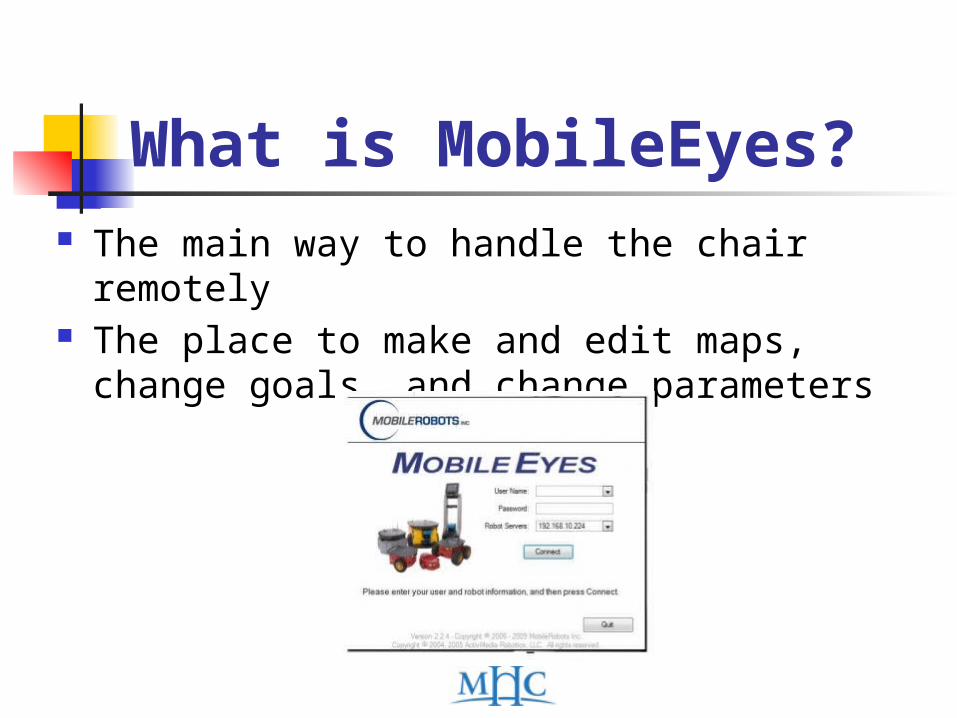
What is MobileEyes? The main way to handle the chair remotely The place to make and edit maps, change
goals, and change parameters
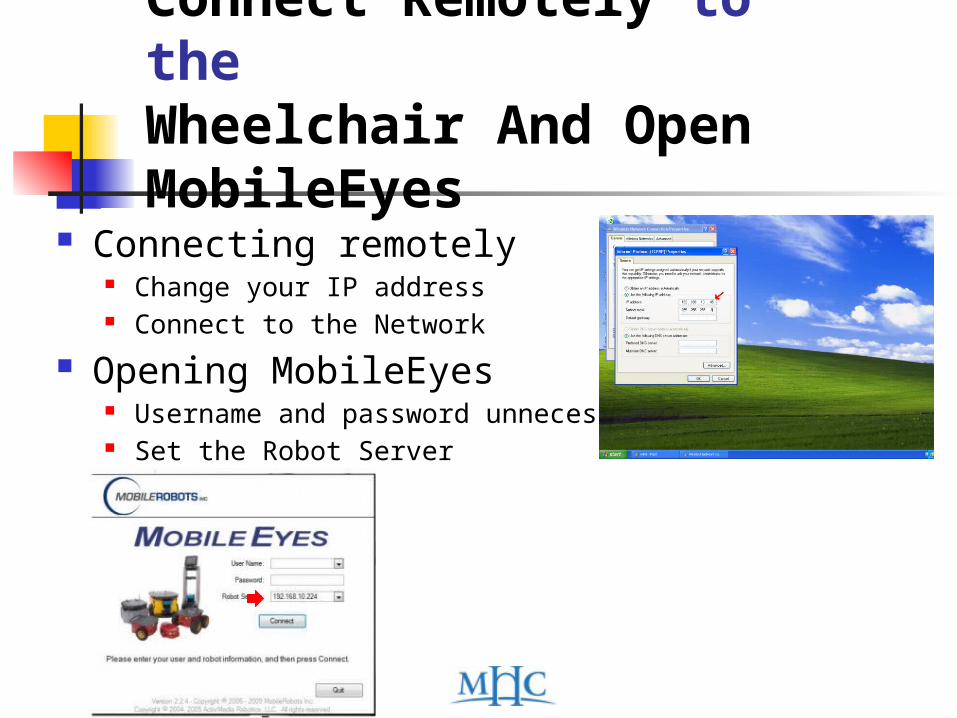
Connect Remotely to the Wheelchair And Open MobileEyes
Connecting remotely Change your IP address Connect to the Network
Opening MobileEyes Username and password unnecessary Set the Robot Server
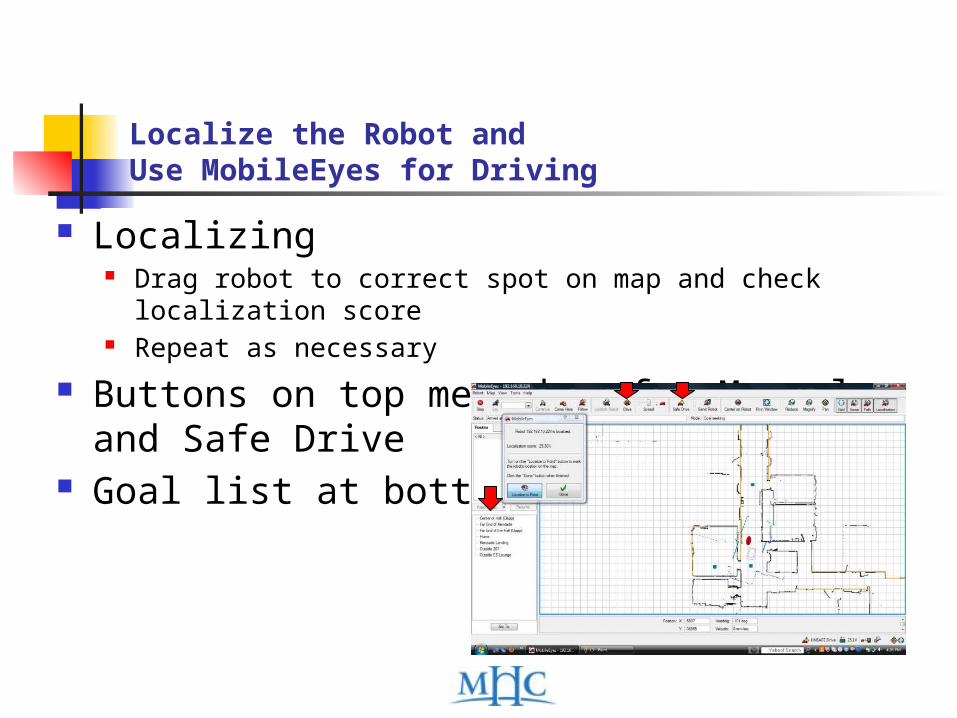
Localize the Robot andUse MobileEyes for Driving
Localizing Drag robot to correct spot on map and check localization
score Repeat as necessary
Buttons on top menu bar for Manual and Safe Drive
Goal list at bottom left

Change Maps in MobileEyes and Enable/Disable Goals On the Chair's Interface
Need to open both Map and LazerLocalizationMap to change maps
To enable/disable goals Go to Look & Feel, then
Goal List on wheelchair (Or X-Windows)
Choose goals from list
Chair Guru Tasks - Administrator/Developer
How to Create a New Map How to Create a New Goal on the Map How to Change Parameters in MobileEyes
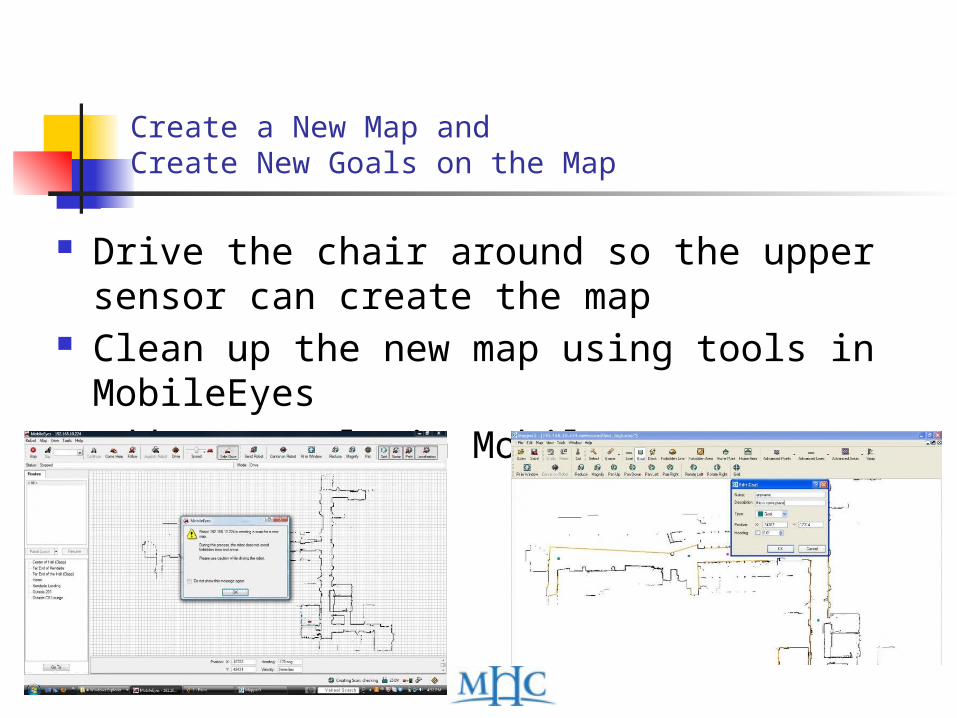
Create a New Map andCreate New Goals on the Map
Drive the chair around so the upper sensor can create the map
Clean up the new map using tools in MobileEyes
Add new goals in MobileEyes
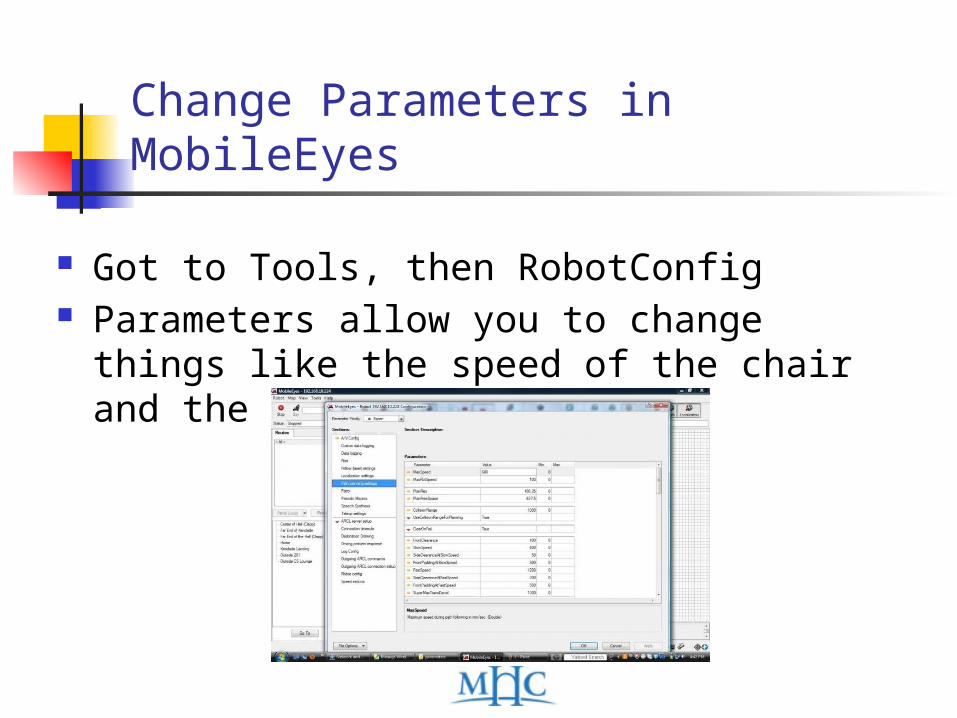
Change Parameters in MobileEyes
Got to Tools, then RobotConfig Parameters allow you to change things like
the speed of the chair and the size of the padding