2%3#4%’56/%&7#)8’9:/,%./ !#$%&’()$’*+,-)-.-+/’0)$%&1(,%& · 0 τ s (e − τ s /2 τ 0...
47
Glider and Autonomous Underwater Vehicle Observing Systems Gwyn Griffiths Southampton Oceanography Centre Southampton, UK http://www.soc.soton.ac.uk/OED/gxg Webb Research
-
Upload
truongthien -
Category
Documents
-
view
241 -
download
1
Transcript of 2%3#4%’56/%&7#)8’9:/,%./ !#$%&’()$’*+,-)-.-+/’0)$%&1(,%& · 0 τ s (e − τ s /2 τ 0...

Glider and Autonomous UnderwaterVehicle Observing Systems
Gwyn GriffithsSouthampton Oceanography Centre
Southampton, UKhttp://www.soc.soton.ac.uk/OED/gxg
Webb Research

Outline of the lecture
!Glider and AUV technology - where are we?
! Sampling strategies for autonomous vehicles
! Sensors for use on AUVs
! Examples of glider & AUV applications relevant(in the broadest sense) to HAB studies
! Removing barriers to using new technologies
! Conclusions

A ‘Health Warning’ …“Several authors urge the deployment of new technologies(in the Census of Marine Life Special Issue of Oceanography) …and in all these there is in my opinion a lack of realism aboutwhat they measure”
“Maps of biological variables derived from any surveyrepresent no more than an unverifiable approximation to thetrue distribution at the central moment”
Alan Longhurst, Letter to the Editor. Oceanography, 13(2): 3-4.
“The goal of remote species identification is of immenseimportance and stirs new thinking”
Response by Jesse Ausubel, Oceanography, 13(2): 4.

Autonomous Surface Vehicles
! SASS from SeaSpeed Engineering Ltd., UK
"Semi-submersible design
"Range > 600 km at 12kt
"5 m long
"200 kg payload
"Prototype trials complete; Commercial build ~ 2003
! Caravela from U.Azores etc."Self righting surface craft
"Satellite data & control
"Range > 1300km at 4kt
"7m long, 2m wide & 6m high
"Autonomous CTD winch
!Dolphin semi-submersible from ISE,Canada, with variabledepth towfish 0 - 200 m14 hours at 6 m s-1.

Large and medium-sized AUVs
AutosubSouthampton Oceanography Centre, UK
Martin-600Maridan, Denmark
HuginKongsberg Simrad, Norway
OdysseyBluefin Robotics, USA
Explorer familyISE Research, Canada

AUVs do not need to be large …
Launching an electric Slocum gliderRutgers University, USA
Spray glider, Scripps Inst.Oceanography USA
The Mauve AUVFrance
Remus - a 1.8 m long AUVHydroid Inc., USA
Gavia - a one person AUVHafmynd, IcelandC-Scout, IMD, Canada

Are Gliders magical?
Large AUV! E ~240 MJ! V ~ 1.8 m.s -1
! H ~ 200 W! S ~ 20m2
! η ~ 0.65 x 0.6! e ~472 kJ.km-1
! Range ~ 500 km! Price ~ € 1.5m
Glider (Slocum Electric)! E ~ 8 MJ! V ~ 0.25 m.s-1
! H < 1 W! S ~ 1 m2
! η ~ 0.5 x 0.9! e ~ 8 kJ.km-1
! Range ~ 950 km! Price ~ €75,000
e = ρCdSV3
2η+ H
τ
Energy consumptionper unit distance
Ratio Glider/Large AUVR=0.033R3=0.0027R=0.05R=0.05R=1.15R=0.017R=1.9P=0.05
ρ= 1026 kg.m-3
Cd = 0.24 (AUV)Cd = 0.04 (Glider estimate)

Position
Simplified Data Flow Diagram
ADCP ECHOSOUNDER
DEPTHCNTRL
ATTITUDEDEPTH
MOTORCNTRL
MISSIONCNTRL
NAV &GPS
POSITIONCNTRL
ADCP Alt
Altitude
Pitch & Pitch R
ateDepth
DepthGot Posn
Posn demand
VelocitySpeed
Heading
HeadingYaw rate
Propulsion demand
Got Fix
Depth &
Altitude
demand
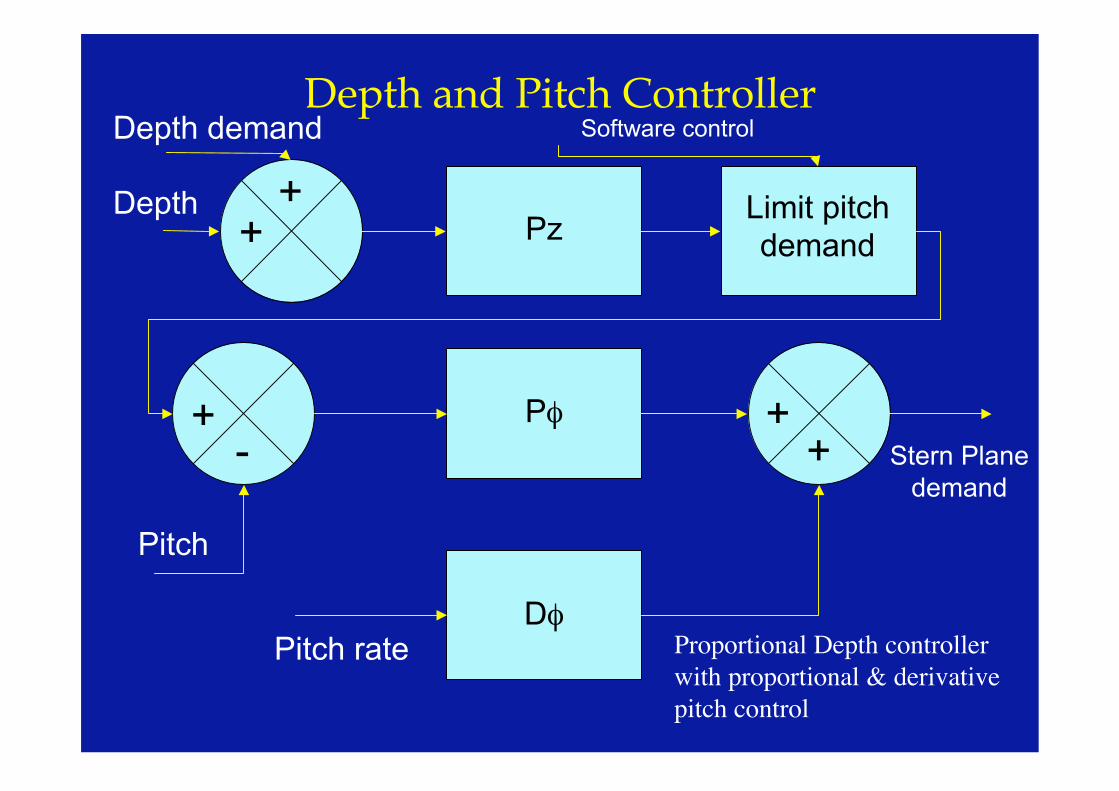
Depth and Pitch Controller
Dφ
++
+ ++-
Depth
Depth demand
PzLimit pitchdemand
Pitch
Pitch rate
PφStern Planedemand
Proportional Depth controllerwith proportional & derivativepitch control
Software control

// When satisfactory GPS fix has been acquired: dive and track follow.when(GotGPSfix) // TimeOut(500), // over-ride if position not reached
MotorPower(400), // set motor power Depth(10), // set depth TrackP(N:56:27.586, W:5:29.477); //
// When got to waypoint track follow at constant altitude off seabed to 2nd position.when(GotPosition) // TimeOut(1000), //
MotorPower(650), Altitude(5), // set altitude TrackP(N:56:27.787, W:5:28.246); // Track follow.
Mission Script Programming

AUV Technology Readiness for HAB studies
! Operating depth less than 500 m Yes! Speed < 1 kt Yes as Glider
5 kt Yes10 kt Only as ASV
! Endurance One day Yes Five days as Glider
Thirty days as GliderSeason unproven
! Position error <10 m Yes! Data telemetry 1 Mbyte per hour Yes
10 Mbits per sec surface short range! Sensors discussed later! Water sampling 50 samples of 250ml Yes
Factor Requirements Available?

Sampling a space- and time-varying process! The problem:Finite speed of theplatform carrying oursensors can lead toDoppler shifting oreven aliasing ofspace-time variations
!Derive a simplemetric for the loss ofinformation fordifferent platformspeeds and numbersof platforms deployed
0
1
2
3
4
5
6Y (km)
0 1 2 3 4 5 6 7X (km)
advected wave
frontal feature
AUV trackXX X
XX
X
AUV samplingstationary feature
AUV samplingadvected featureX
Advection at ~ 15 cm.s-1

Information loss metric
ελ =λs2
λ02 + λs
2
1/ 2
ετ = 1+ 2τ0τs(e−τ s / 2τ 0 −1)
ε tot = ελ +ετ −ελετ
ε tot = 1+ 2τ0τs(e−τ s / 2τ 0 −1)
−2τ0τs
λs2
λ02 + λs
2
1/ 2
e−τ s / 2τ 0 −1( )
τ0 temporal correlation scale
τs time taken for the survey
λ0 spatial correlation length scale
λs the survey spatial resolution,where λs is twice the leg spacingfor a ‘lawnmower’ type of survey
As εtot ->1, little information onthe true spatial and temporalproperties of the process isobtained
As 0 <- ε the survey approaches atrue snapshot without temporal orspatial blurring.
From Willcox, J. S., Bellingham, J. G., Zhang, Y,Baggeroer, A. B. (2001). IEEE J. Oceanic Eng. 26: 711-725.

Information metric for different platforms
Consider:! Glider operating at0.3 m.s-1
! AutonomousUnderwater Vehicleoperating at 2 m.s-1
! Autonomous SurfaceVehicle at 5 m.s-1
surveying an area of30 km2 where theprocess has a temporalcorrelation scale of6 hours and a spatialcorrelation scale of5 km.

AUV Sensors for marine life
EK500 (or EK60) scientificecho sounder at e.g. 38 & 120kHz for zoo-plankton studies
!Red solid-state laser at 675nm!Chl fluorescence at > 680nm! Forward & side scatter at 670nm! Pulse digitization at 3µm!Size range 2 - 500 µm (esr)! Max depth 250 m!Power consumption 20 W!415 mm diameter, 530 mm long
Alex Cunningham
Cytosub: in situ flow cytometer

In situ Zooplankton imagery from an AUV
Courtesy College of Marine Science, University of South Florida.
! SIPPER, the Shadowed ImageParticle Profiler"96 mm square sampling area"46 by 67 µm resolution (at1 m.s-1) from 2048 pixel array
"Raw 75 MB/s compressed to~ 7.5 MB/s
"Data recording on 2 x 18GBdisks
"AUV operation for ~ 1 hour

AUV in situ mass spectrometer! In situ Mass spectrometerU South Florida developmentCommercially available
"Used on Ocean Explorer & ARCS
"ppb detection threshold
"Up to 7 days endurance
"Membrane introduction
"Today: VOC & dissolved gasses to100 m/z
" In development: up to 200 m/z
"Compare to Domoic Acid at 312.1amu
CourtesyAML

Examples of Glider & AUV userelevant to study of HABs
! Glider operations off Florida in the Gulf of Mexico
! Studies of small-scale patchiness off Cape Cod,Massachusetts
! Investigation of mixed phytoplankton populations off theScilly Isles, UK
! Hypothesis-testing experiment on krill distribution in theWeddell Sea
! Acoustic fish stock assessment from an AUV
! Flow and turbulence measurements in the coastal ocean

Operation Gulfcast
! “Our goal is to develop anintelligent fleet of coastalSlocum Gliders thatprovide maps of thephysics, bio-optics andbiology on continentalshelves”From a poster by Schofieldet al. (2003)
Data and illustrations courtesy ofDr Oscar Schofield, Rutgers UniversityInstitute of Coastal and Marine Science.
The Tools The Slocum electric gliderfrom Webb Research
Length: 150 cmMass: 52 kgPayload: 5 kgWingspan: 120 cmEnergy: 8MJ at 21˚CPmax: 200 dbarUmax: 0.4 m.s-1
Hydroscat 2
Optical backscatter &fluorescence from dualwavelength HOBI-LabsHydroScat-2
670 & 470 nm excitationBackscatter at 140˚Chlorophyll emission2.5 l volume; 4 kg in air1 W power consumption

Operation Gulfcast:
Where? The Ecology of Harmful AlgalBlooms (ECOHAB) site, WestFlorida Shelf. Based out of MoteMarine Laboratory in Sarasota, FL.
When? January 12 – 16, 2003Who? Team of Rutgers University andMote Marine Laboratory
What? Daily glider deployments on theECOHAB transect line (opposite)during a red tide event.Gliders mapped physical and opticalfeatures over a 3.5 – 5 km path.Real-time data sent to support ship,for immediate processing & display.
27.4
27.6
27.8
28.0
27.2
-82.8 -82.4-83.2
ECOHAB TRANSECT LINE
20km

Operation Gulfcast:Optical backscatter and fluorescence
Backscatter at 670 nm 16 January 2003 Chlorophyll fluorescence (m-1) (units)
Expanded diagramto show samplingpoints from theglider profiles

Littoral Ocean Observing and Predicting SystemMassachusetts Bay Experiment
! How does phytoplanktonpatchiness relate tophysical processes in acoastal location (CapeCod and MassachusettsBays)?
! Use an AUV - theOdyssey - in a saw-toothprofiling pattern betweenthe surface and seabed(20-60 m).
Data and illustrations courtesy ofProf. Tommy Dickey, University ofCalifornia, Santa Barbara, OpticalPhysics Laboratory.
Key sensorsSeapoint chlorophyll fluorometer
Low power (~ 200 mW)Small size (0.6 l; 0.85 kg in air)Excitation: 470 nm (Blue LED)Emission: 685 nm (+/- 30 nm)Min. detectable level: 0.02 mg.l-1
Wetlabs Light BackScatter Sensor*Optical backscatter at 880 nm
High fluor & low backscatter implies phytoplanktonLow fluor & high backscatter implies sediment

LOOPS Massachusetts Bay Experiment Data
Profiles in Red
Profiles in Black
Odyssey AUV with sensors in the nose

LOOPS Massachusetts Bay Experiment Results
! Chlorophyll profiles well measured with verticalresolution of ~ 0.1 m and horizontal resolution of ~ 120 mat the pycnocline
! Zero crossing of autocorrelation length scale, as observed,was ~ 450 m" AUV profiles with horizontal resolution of ~ 120 m provided>3 samples within this scale, and >12 samples within one period(assuming period ~ 4 x the autocorrelation length scale).
" Apparent scale - 1.8 km - needs correcting for Doppler shift
! Newer optical scattering sensors, e.g. three-wavelength(470,530, 660 nm), three angle (100, 125, 150˚) devicefrom Wetlabs (ECO-VSF3) would provide additionalinformation.

The SSCAPA Scillies experiment: May 2001
In situ cytometer
Capabilities
- Analysis of living & non-living particles
- Abundance
- Particle sizing & discrimination throughanalysis of pulse shapes
Sampling
- Abundance estimation ~1 - 104 per ml
- Sample volume up to 4 ml
- Sampling interval every 10 minutes
- Spatial resolution on Autosub ~500 m
Data courtesy of Dr Glen Tarran,Plymouth Marine Laboratory,SeaWiFS data received at NERCreceiving station, Dundee andprocessed at the Plymouth MarineLaboratory. SeaWiFS data courtesyof the NASA SeaWiFS Project andOrbimage. CASI data courtesy ofthe UK Environment Agency.

SCAPPA remote sensingSeaWifs imagecaptured on24 May 2001
Plan for CASIoverflights from theUK Environment
Agency
Ship &Autosub

Mixed diatoms
Phaeocystis colonies
Emilianiahuxleyi5-8 µm
50 5’ No
49 25’ No
49 35’ No
49 45’ No
49 55’ No
6 40’ W
o
6 30’ W
o
6 20’ W
o
6 10’ W
o
6 00’ W
o
5 50’W
o
Isles of Scilly
SSCAPA - Field trials in AutosubIsles of Scilly 18 - 26 May 2001
Autosub (AS) missions and dates
AS265 20 May
AS266 22 May
AS26723 May
AS26823 May
AS26924 May
AS27024 MayAS271
25 May
AS272 25 May
Autosub missions = 8Kilometres covered = 87CytoSub samples = 99
The Study Area

Seawifs & Cytosub comparison

y = 1.1078x + 212.35
R2 = 0.7328
0
500
1000
1500
2000
2500
3000
0 500 1000 1500 2000 2500 3000
CytoSub cells mL-1
Verifying results: abundance of E. huxleyiSample analysis

0
200
400
600
800
1000
1200
1400
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
Sample No.
AS272: 25/05/01
Ac9 scatteringand Hydroscatbackscatteringtransects fromAutosub
Emiliana huxleicell densitymeasured underway by Cytosub
Integrating with other measurements

USIPS - Acoustic observations of zooplankton
! Test the Null hypothesis:There is no difference inkrill population density inopen waters and under seaice.
! Use remote sensingacoustic instrumentation:38 & 120 kHz scientificecho sounders
Data and illustrations courtesy ofDr Andy Brierley (University ofSt Andrews) and Dr Paul Fernandes(Marine Lab., Aberdeen).

USIPS Study area and experiment plan
Position of ice edgeupdated by e-mail

USIPS data & resultsDepth (m) 0
50
100Distance (m)0 1400
Above: echogram at 38 kHz from theEK500 during an AUV transect at 150 mdepth, showing krill swarms and underside of sea ice.
Right (lower) ice concentration relativeto the ‘edge’; (upper) krill biomassinferred from EK500 data and knowntarget strength data on krill.

USIPS unresolved observationUnder sea-ice, krillswarms wereassociated with thepresence of icekeels with 164 ofthe 194 detectedswarms occurringless than 185 mhorizontally fromsea-ice projectionsthat extended morethan 2.5 m deeperthan the immediatemean sea-ice depth(Probability bychance: less than 1in 1000)

Sea Ice Thickness from AutosubUnpublished data courtesy Dr Mark Brandon, Open University
Under diffuse ice
Mean thickness is of same magnitude as winter measurements made fromupward-looking sonar in the same area (Strass and Fahrbach, 1998) Thickness is greater than expected from manual ice coring

AUV flow circulation and turbulence studies
! “Small-scale turbulence is critical tocommunity interactions in theplankton”Report GEOHAB Workshop 13-17 Oct. 1998.
! Can an AUV be used to map thespatial variations of turbulence (andtidal current & residual circulation)in an area of varying seabedtopography?
! The concept is that of a series of‘virtual moorings’.
Data and illustrations courtesyof Dr George Voulgaris,University of South Carolina
53o25N
53o15N
2o00E 2o20E
Work area in the N Sea
Typical Tripod mooring

Data acquisition and experiment plan
1. 1200 kHz ADCP 1Hz at 10 cm verticalresolution2. 300 kHz ADCP for vehicle navigation3. ADV Point measurement at 16 Hz4. 200 kHz collision avoidance sonar5. 1.75 MHz ping-to-ping coherent Doppler,sub-cm resolution
12
34 5
SWNE
2.12
2.14
2.16
2.18
2.2
2.22
53.2753.28
53.2953.3
53.3153.3
40
30
20
10
0
Latitude (degs)
AUTOSUB Terrain Following Mission N. Sea
Longitude (degs)
Dis
tanc
e fr
om s
ea s
urfa
ce (
m)
Start Point
Surfacing for GPSposition fixing
Terrain Following
Terrain following mission at 4 m above seabed covering 162 km

Results: Tidal currents and mean circulationAUV transect data binnedinto 15 segments acrossthe bank - spaced closernear the crest
M2 tidal current ellipsesshow change in direction,and magnitude of flowfor the minor axis.
Residual currentdiagram shows clockwiseresidual flow along theridge, while the residualflow diverged across theridge.
Clockwiseapproaching crest
Rapid anti-clockwisepassed crest
u
v
Ridge axis

Results: Turbulence - Spatial Variability of DragCoefficient (from ADCP)
Momentum Balance Along-Ridge Cd
Tripod, ADV estimated Cd

Sonar, shear probes and bubble resonator
Measurement volumebetween the two plates
Post-encounter: ! quantify bubble population ! estimate size spectra ! calculate air fraction
Pre-encounter: map bubble distribution ahead of AUV

Bubble size spectra from Autosub
Courtesy Dr David Farmer

Variations around centre of bubble clouds
From Thorpe et al. (2003), JPO 33:122-145
Tracks at 45˚ to the wind;
Mean winds 11.6 ms-1
1289 samples
Dissipation rate (m2s-3 x 10-6)
Acoustic backscatter (volts)
Temperature (˚C)
AUV depth (m)
Temperature variance (˚C2 m-2 x 10-3)
3
2.5
21.5
8
7
7.804
7.803
7.802
4
4.1
8
6
40 5 10 15-5-10-15
0 5 10 15-5-10-15Relative time (s)
Relative time (s)

Removing the barriers to takeup
! Avoid hyperbole! Meet or exceed expectations! Tackle conservatism ofmany users
! Look to examples in thegrowing peer reviewedliterature
! Background of growingknowledge and experienceof AUVs amongst referees& reviewers
! No real barriers perceived inAUV technology per se
! Rather, incrementaldevelopments will give betterperformance at lower cost
! Reliability needs to improve! Suitable sensors remain amajor challenge for in situ,autonomous applications
Scientific Technical

Removing the barriers to takeup
! High cost of large & medium-sized AUVs is a seriousbarrier.
! Technology advances leadingto smaller, yet capablevehicles
! Competition driving price-performance improvements
! Service providers areemerging
! Sensor manufacturers areseeing AUVs as potentialmarket
! Move to smaller vehicles toreduce support team andinfrastructure size
! Reduce dependence onsupport ships
! Work towards acceptance ofshore-based missionse.g. develop agreedprotocols, codes of practice
! Work with risk management/ insurance professionals toavoid potential threats
Economic Logistical

Removing the barriers to takeup: Legal
! Complex issues in National & International Public Law, StatePractice and Private Law -See Brown and Gaskell (2001) ISBN 0 906940 40 0 for a summary.
! Key areas:" International Law of the Sea - UNCLOS; Scientific,Commercial or Military?
" Particular areas - e.g. Antarctica, Straits, Sealanes,Archipelagic waters
"Legal definition of an AUV - Are they (might they) beclassed as ships? Is there (might there) be a requirement forthem to be registered and/or classified?
"Legal responsibilities - On owners, deploying vessel,operators, programmers.
"Salvage rights, and avoiding false salvage etc. etc.

Conclusions
!Gliders and AUVs (of all types) have the potentialto contribute as part of an observing system forHAB studies" Very recent experiences show this to be so
!AUVs do enable creative hypothesis-testingprocess study experiments to be carried out at sea
! These vehicles can be used in experiments tocomplement and ground-truth remote sensed data
! Barriers to take-up need to be removed and moresensors need to be available to realise fully thepotential of AUVs