23 Winkler
16
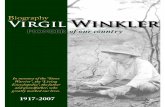
51 Capitolo 3 TRAVE SU SUOLO ELASTICO 3.1 Introduzione Il problema della trave su suolo elastico è un esempio di problema diffusivo che si incontra nella progettazione di elementi strutturali in grado di diffondere carichi concentrati di grossa entità su superfici molto maggiori dell’impronta dei carichi stessi. Il modello della trave su suolo elastico può essere utilizzato per lo studio di diversi problemi strutturali, tra i quali le travi poggianti sul terreno od il problema delle connessioni a piolo nei solai collaboranti acciaio-calcestruzzo e legno-calcestruzzo. Questo modello può essere, inoltre, utilizzato per lo studio di strutture particolari come, ad esempio, quelle poggianti su vincoli elastici isolati: questo è il caso delle rotaie poggianti su cuscinetti di neoprene, del graticcio di travi e dei ponti strallati. La distanza tra gli appoggi discreti deve essere significativamente inferiore alla lunghezza dell’elemento, o, più propriamente, come spiegato nel seguito, alla zona di diffusione dei carichi. 3.2 La trave su suolo elastico o alla Winkler Si definisce trave su suolo elastico, o alla Winkler, la trave prismatica vincolata bilateralmente per tutta la sua lunghezza ad un mezzo elastico capace di reagire punto per punto con una reazione r proporzionale alla componente di spostamento ortogonale all’asse della trave, y, che è l’incognita del problema. Figura 3.1: Trave su suolo elastico alla Winkler.
description
trave su suolo elastico alla Winkler
Transcript of 23 Winkler

51
Capitolo 3 TRAVE SU SUOLO ELASTICO
3.1 Introduzione
Il problema della trave su suolo elastico è un esempio di problema diffusivo che si incontra
nella progettazione di elementi strutturali in grado di diffondere carichi concentrati di
grossa entità su superfici molto maggiori dell’impronta dei carichi stessi.
Il modello della trave su suolo elastico può essere utilizzato per lo studio di diversi problemi
strutturali, tra i quali le travi poggianti sul terreno od il problema delle connessioni a piolo
nei solai collaboranti acciaio-calcestruzzo e legno-calcestruzzo.
Questo modello può essere, inoltre, utilizzato per lo studio di strutture particolari come, ad
esempio, quelle poggianti su vincoli elastici isolati: questo è il caso delle rotaie poggianti su
cuscinetti di neoprene, del graticcio di travi e dei ponti strallati.
La distanza tra gli appoggi discreti deve essere significativamente inferiore alla lunghezza
dell’elemento, o, più propriamente, come spiegato nel seguito, alla zona di diffusione dei
carichi.
3.2 La trave su suolo elastico o alla Winkler
Si definisce trave su suolo elastico, o alla Winkler, la trave prismatica vincolata bilateralmente
per tutta la sua lunghezza ad un mezzo elastico capace di reagire punto per punto con una
reazione r proporzionale alla componente di spostamento ortogonale all’asse della trave, y,
che è l’incognita del problema.
Figura 3.1: Trave su suolo elastico alla Winkler.

3. TRAVE SU SUOLO ELASTICO
52
3.2.1 Caratterizzazione meccanica del terreno
È bene sottolineare come il terreno non possa rigorosamente essere definito come un mezzo
elastico, visto che non resiste a trazione. Tuttavia la schematizzazione elastica, se
opportunamente discussa, può essere considerata valida, come meglio spiegato nel seguito.
Una prima classificazione, per la caratterizzazione meccanica del terreno che costituisce il
supporto della trave, può essere effettuata distinguendo due tipologie di terreno: il terreno
coerente ed il terreno incoerente.
Il terreno può essere definito coerente se la deformazione del terreno dovuta all’applicazione
del carico interessa porzioni di terreno esterne all’impronta di carico, cioè se il terreno ha la
capacità di trasferire sforzi di taglio. Questo caso rappresenta, in generale, il comportamento
di terreni argillosi o rocciosi.
Figura 3.2: terreno di tipo coerente.
Il terreno può essere definito incoerente se la deformazione del terreno dovuta
all’applicazione del carico avviene senza perturbare le zone esterne all’impronta di carico. Il
terreno incoerente può subire dilatazioni e contrazioni, ma non scorrimenti angolari: il
terreno incoerente non può trasferire sforzi di taglio.
Figura 3.3: Terreno di tipo incoerente.
Il comportamento di un terreno incoerente, in virtù dell’incapacità di trasferire sforzi di
taglio, si presta maggiormente ad essere schematizzato attraverso un letto di molle che si
deformano in modo indipendente le une dalle altre con una rigidezza kT data dalla seguente
relazione:
(3.1)
dove:
kT è la costante di Winkler (indicata anche con ) [kg/m3];
σT(x) è lo sforzo agente su una molla nella direzione perpendicolare all’asse della trave;

3. TRAVE SU SUOLO ELASTICO
53
y(x) è lo spostamento su una molla nella direzione perpendicolare all’asse della trave,
incognita del porblema
.
Figura 3.4: Trave su suolo elastico soggetta ad un carico distribuito.
La rigidezza del terreno viene espressa dalla costante di Winkler, che rappresenta la forza da
esercitare su una superficie unitaria per ottenere un abbassamento unitario del terreno. I
valori tipici della costante di Winkler, in funzione della tipologia di terreno, sono riportati
nella seguente tabella:
Tipologia di terreno Costante di Winkler – kT
[N/cm3] [kg/cm3]
Terreno con sabbia 10-40 1-4
Terreno con argilla 80-120 8-12
Terreno con ghiaia 100-300 10-30
Terreno roccioso >1000 >100
Tabella 3.1: Valori della costante di Winkler.
3.3 Trattazione analitica del problema
La trave prismatica, vincolata bilateralmente per tutta la sua lunghezza ad un supporto
elastico, risulta essere una struttura infinitamente iperstatica.
La soluzione del problema può essere determinata in forma analitica assumendo le seguenti
ipotesi semplificative:
- Il suolo elastico sia costituito da un terreno di tipo incoerente;
- Il terreno incoerente sia schematizzato attraverso un letto di molle di rigidezza kT che
realizzino un vincolo di tipo bilatero con la trave: le molle sono pertanto resistenti a
trazione, anche se il terreno non lo è. Di fatto, le trazioni presenti, nella maggio parte dei
casi, sono molto basse e assorbite dalle compressioni locali dovute al peso proprio della
trave stessa; le molle inoltre siano indipendenti, continue e lineari;
- La rigidezza flessionale EJ della trave prismatica sia considerata costante;
- La deformazione a taglio della trave sia trascurata: si consideri solo il contributo
flessionale;
- Le pressioni del terreno σT siano considerate uniformi lungo la larghezza b della trave.
Si consideri la trave di fondazione illustrata in figura soggetta all’azione di un carico
concentrato Q e di un carico distribuito p(x):

3. TRAVE SU SUOLO ELASTICO
54
Figura 3.5: Trave su suolo elastico soggetta ad un carico distribuito p(x) ed un carico concentrato Q.
La reazione del terreno risulta proporzionale alla rigidezza del terreno kT, all’abbassamento
del terreno y(x) ed alla larghezza della trave b, secondo la seguente relazione:
(3.2)
Si consideri il concio di trave di lunghezza dx, illustrato in figura:
Figura 3.6: Convenzioni di segno sul concio di trave su suolo elastico.
L’equazione della linea elastica alle derivate quarte per la struttura in esame risulta:
(3.3)
Combinando la (3.2) con la (3.3) si ottiene:
(3.4)
L’equazione differenziale (3.4) può essere così riscritta:
(3.5)
La soluzione dell’equazione differenziale di ordine IV a coefficienti costanti (3.5) costituisce
la soluzione del problema della trave su suolo elastico.

3. TRAVE SU SUOLO ELASTICO
55
La soluzione dell’equazione differenziale sarà la somma di un integrale particolare yP(x) e
dell’integrale generale dell’equazione omogenea associata y0(x), secondo la seguente
relazione:
(3.6)
3.3.1.1 Integrale particolare
Si consideri come integrale particolare la seguente espressione:
(3.7)
L’integrale particolare rappresenta l’abbassamento della struttura dovuto alla presenza di un
carico distribuito p(x) di tipo lineare, parabolico o cubico, tale che:
(3.8)
In generale gli effetti del carico distribuito p(x) sono trascurabili rispetto a quelli dovuti ai
carichi concentrati. Ad esempio, in un edificio con struttura in calcestruzzo armato, i carichi
distribuiti agenti sulle travi di fondazione, dovuti agli elementi gravanti direttamente su di
esse (peso proprio più eventuale solaio), risultano ampiamente inferiori ai carichi concentrati
trasmessi dai pilastri.
3.3.1.2 Integrale generale
Trascurando gli effetti del carico distribuito, si consideri l’equazione omogenea associata
all’equazione differenziale (3.5):
(3.9)
Ponendo:
(3.10)
Si può scrivere la (3.9) nella forma:
(3.11)
dove:
è il rapporto fra la rigidezza del supporto elastico (terreno nel caso più
frequente) e la rigidezza della trave7fondazione.
L’integrale generale è dato dalla seguente relazione:
(3.12)
Il problema è risolvibile imponendo quattro condizioni al contorno, sia di tipo
cinematico (spostamenti e rotazioni) sia statico (taglio e momento).

3. TRAVE SU SUOLO ELASTICO
56
3.4 Trave illimitata soggetta a carico concentrato
Per semplicità si consideri la trave su suolo elastico di lunghezza illimitata e soggetta ad
carico concentrato Q, indicata nella seguente figura.
Figura 3.7: Trave su suolo elastico di lunghezza illimitata seggetta ad un carico distribuito p(x) ed un
carico concentrato Q.
Posto come asse x l’asse geometrico della trave e come asse y l’asse di applicazione del
carico, allora l’asse y costituisce l’asse di simmetria della deformata della trave.
La soluzione del problema è data dalla somma di un integrale particolare, dovuto alla
presenza di carichi distribuiti, ed un integrale generale. Tuttavia, trascurando la presenza di
carichi distribuiti, la soluzione si riduce all’intergale generale dato dalla (3.12).
La soluzione del problema risulta nota a meno di quattro costanti di integrazione che
possono essere facilmente determinate imponendo la congruenza con le condizioni al
contorno che sono sia di tipo statico, legate alle azioni interne, sia di tipo cinematico, legate
alle deformazioni ed alle rotazioni della trave.
3.4.1.1 Condizioni al contorno 1 e 2 (condizioni cinematiche)
A distanza infinita dal punto di applicazione del carico il fenomeno diffusivo potrà
considerarsi, a buon ragione, esaurito e gli spostamenti verticali y(x) della trave potranno
considerarsi nulli. Infatti si ha:
Condizione al contorno 1 (3.13)
e per simmetria rispetto all’origine:
Condizione al contorno 2 (3.14)
Queste condizioni al contorno possono essere verificate solo con l’annullarsi dei termini che
moltiplicano l’esponenziale positivo della (3.12) e quindi si ha:
(3.15)
La soluzione dell’omogenea associata può essere così riscritta:
(3.16)
Derivando la (3.16) rispetto a x si ottiene:
(3.17)

3. TRAVE SU SUOLO ELASTICO
57
3.4.1.2 Condizione al contorno 3 (condizione cinematica)
Nel punto di applicazione del carico, per la simmetria della deformata rispetto all’origine,
potrà considerasi nulla la rotazione y’(x) (del resto la funzione y(x) ha un massimo). Pertanto
si ha:
Condizione al contorno 3 (3.18)
Questa condizione al contorno si verifica solo con l’annullarsi del termine che moltiplica il
coseno della (3.17) e pertanto:
(3.19)
La soluzione dell’omogenea associata può essere nuovamente riscritta:
(3.20)
Derivando la (3.20) rispetto a x si ottengono le seguenti espressioni:
(3.21)
(3.22)
(3.23)
3.4.1.3 Condizione al contorno 4 (condizione statica)
Si consideri il concio di trave di lunghezza infinitesima nell’intorno dell’origine soggetto
all’azione del carico Q e soggetto a due forze di taglio V sulle estremità del concio.
Figura 3.8: Equilibrio alla traslazione verticale del concio di trave all’origine.
Per equilibrio alla traslazione verticale e alla rotazione le forze di taglio assumono verso
concorde e modulo pari a:
Condizione al contorno 4 per x 0+ (3.24)
L’equazione della linea elastica alle derivate quarte, stabilendo un legame fra gli spostamenti y
della linea elastica ed i carichi applicati alla trave, ci consente di esprimere l’azione di taglio
come:
(3.25)
Sostituendo l’espressione si ottiene:

3. TRAVE SU SUOLO ELASTICO
58
(3.26)
e quindi:
(3.27)
dove
(3.28)
3.4.1.4 Soluzione del problema
La deformata della struttura risulta infine:
(3.29)
Derivando la (3.29) rispetto a x si ottengono le seguenti espressioni:
(3.30)
(3.31)
(3.32)
Le espressioni del momento flettente M(x) ed del taglio V(x) risultano pertanto:
(3.33)
(3.34)
3.4.1.5 Tracciamento della deformata e delle azioni interne
La deformata e le azioni interne assumono il valore massimo in corrispondenza del punto di
applicazione del carico, per x = 0, ed un andamento periodico smorzato dovuto al prodotto
tra le funzioni periodiche e l’esponenziale negativo.
I valori massimi della deformata e delle azioni interne sono dati dalle seguenti espressioni:
(3.35)
(3.36)
(3.37)

3. TRAVE SU SUOLO ELASTICO
59
Inoltre se definiamo lunghezza d’onda λ la distanza fra due punti di massimo o di minimo di
una funzione periodica di argomento αx, si ottiene la seguente relazione:
(3.38)
La lunghezza d’onda λ può essere espressa come:
(3.39)
Ad una distanza λ dal punto di applicazione del carico lo smorzamento assume un valore
pari al 2 ‰, infatti:
(3.40)
Inoltre ad una distanza λ/2 dal punto di applicazione del carico lo smorzamento assume un
valore pari al 4 %, infatti:
(3.41)

3. TRAVE SU SUOLO ELASTICO
60
La seguente figura mostra l’andamento qualitativo della deformata strutturale e delle azioni
interne sul semiasse positivo della trave ma, grazie alla simmetria del problema, i risultati
ottenuti possono essere estesi al semiasse negativo.
Figura 3.9
3.4.1.6 Esempio
Si consideri una trave di fondazione in calcestruzzo armato, di sezione rettangolare con
altezza h e base b. Si considerino le seguenti caratteristiche della trave e del terreno di
fondazione:
(3.42)
(3.43)
(3.44)
Il momento d’inerzia J baricentrico per una sezione rettangolare risulta:
(3.45)
La lunghezza d’onda λ risulta pertanto:

3. TRAVE SU SUOLO ELASTICO
61
(3.46)
Osservazione
Dalla relazione (3.39) si può osservare che la lunghezza d’onda λ e, quindi, la capacità di
diffusione del carico sia direttamente proporzionale alla rigidezza flessionale della trave EJ
ed inversamente proporzionale alla rigidezza del terreno kT. Ad esempio travi rigide su
terreni cedevoli hanno una notevole capacità di diffondere i carichi.
Dalla relazione (3.40) si può osservare che ad una distanza λ dal punto di applicazione del
carico lo smorzamento assume un valore pari al 2 ‰ e che, quindi, travi di lunghezza
superiore a 2λ possono considerarsi come travi infinitamente lunghe.
La lunghezza d’onda λ risulta, quindi, essere il parametro fondamentale per controllare la
capacità di diffusione dei carichi del sistema costituito da trave e terreno.
Osservazione
Osservando la figura si può notare che a distanza x compresa fra e la deformata
strutturale presenti valori positivi e che, quindi, la struttura tenda a sollevarsi verso l’alto.
Per l’ipotesi di vincolo bilatero il terreno genera un sistema di forze di richiamo elastico
dirette verso il basso e proporzionali alle deformazioni della trave. Tuttavia questa
situazione non corrisponde a nessun caso reale poiché il terreno, in generale, ha resistenza
nulla a trazione. Il modello della trave su suolo elastico può essere ancora ritenuto
accettabile se si considera la modesta entità di tali forze.
Inoltre se si considera la presenza di più carichi concentrati, ad esempio i carichi trasmessi
dai pilastri ad una trave di fondazione, si verifica la sovrapposizione di sollecitazioni di
trazione, con sollecitazioni di compressione del terreno. Si realizza, quindi, un’azione di
livellamento delle sollecitazioni sul terreno che ha come effetto la riduzione delle zone di
terreno sottoposto sollecitazioni di trazione.
Osservazione
Il modello della trave su suolo elastico può essere perciò adottato per risolvere il problema
di diffusione di carichi concentrati, come ad esempio quelli trasmessi dai pilastri alle
fondazioni, laddove la soluzione del plinto genera uno stato di sollecitazione troppo gravoso
per il terreno.

3. TRAVE SU SUOLO ELASTICO
62
3.5 Il graticcio di travi
Il graticcio di travi è un modello strutturale bidimensionale che può essere adottato nel
dimensionamento dei solai con lo scopo di ripartire le sollecitazioni su travi e travetti in
ragione della loro rigidezza flessionale.
Nello schema di solaio classico la trave di spina costituisce un appoggio rigido per il travetto
mentre nello schema di graticcio di travi si considera la deformabilità della trave di spina.
L’utilizzo del modello a graticcio di travi può essere utile quando le travi di spina hanno luci
elevate: considerando il mutuo effetto della trave e dei travetti si può ottenere una
vantaggiosa riduzione delle sollecitazioni sulla trave di spina e, per contro, l’aumento delle
sollecitazioni sui travetti.
Tale modellazione è maggiormente sensata in presenza di rigidezze flessionali simili tra
trave principale e secondaria, il che non avviene, di regola, nei solai in latero-cemento.
Si consideri il solaio schematizzato nella seguente figura:
Figura 3.10: Solaio con schema a graticcio di travi.
La trave costituisce un appoggio cedevole per i travetti mentre, a sua volta, risulta essere
incastrata agli estremi e appoggiata su una serie di appoggi di continuità cedevoli, costituiti
dai travetti. Se il rapporto d/L fra l’interasse dei travetti e la lunghezza della trave principale
è sufficientemente piccolo (o meglio, d/), gli appoggi isolati possono essere ricondotti ad un
suolo continuo alla Winkler.
Si assumono alcune ipotesi semplificative:
- I materiali abbiano un comportamento elastico lineare, omogeneo ed isotropo;
- La trave sia soggetta a spostamenti verticali che ricadono nel campo dei piccoli
spostamenti;
- La trave principale e le secondarie siano prismatiche di luce L e l;
- La rigidezza flessionale della trave (EJ)L e dei travetti (EJ)t siano considerati costanti;
- La trave principale sia vincolata nella mezzeria dei travetti;
- Si consideri la presenza di un vincolo sferico bilatero tra la trave principale e le travi
secondarie in modo che si possa trascurare la torsione dei travetti generata dalla flessione

3. TRAVE SU SUOLO ELASTICO
63
della trave. Il vincolo pertanto trasmette unicamente forze, non momenti. In realtà, come
già osservato nella teoria delle piastre sottili, la flessione della trave principale torce i
travetti secondari e viceversa. Questo aspetto viene qui trascurato, assumendo che la
rigidezza torsionale sia trascurabile (lo è nelle strutture in calcestruzzo armato,
soprattutto dopo la fessurazione).
Staticamente, il problema può essere trattato schematizzando la trave principale su letto di
molle elastiche, costituito dalle travi secondarie.
Si assume inoltre convenzionalmente che tutto il carico sia attribuito alle travi secondarie.
Si consideri il travetto secondario del graticcio, a sua volta schematizzato come illustrato in
figura:
Figura 3.11: Schema strutturale del travetto secondario.
La trave principale viene schematizzata come una molla traslazionale posta nella mezzeria
del travetto. La reazione della molla può essere ottenuta grazie al principio di
sovrapposizione degli effetti:
(3.47)
dove R’ è la reazione del vincolo supposto infinitamente rigido (come nel caso del travetto in
latero-cemento) mentre R’’ rappresenta la reazione della molla elastica dovuta alla
deformabilità y, incognita del problema. R’’ è tanto maggiore quanto più il vincolo è
cedevole, determinando infatti una diminuzione della reazione totale R.
Inoltre,

3. TRAVE SU SUOLO ELASTICO
64
è il carico totale;
γ è il coefficiente di influenza del carico (carico uniformemente distribuito
γ=5/4).
La rigidezza della molla può essere facilmente determinata attraverso il teorema e il corollario
di Mohr, come da figura seguente:
(3.48)
Figura 3.12: Determinazione dello spostamento verticale y attraverso i corollari di Mohr.
La rigidezza della molla risulta:
(3.49)
Osservazione
Dalla relazione (3.49) si può osservare che la rigidezza flessionale (EJ)L della trave non
influenza la rigidezza della molla k.
La rigidezza flessionale (EJ)L della trave influenza, invece, l’abbassamento y dei travetti che,
collocati in punti diversi della trave subiscono abbassamenti diversi. Per questa ragione la
reazione R della trave risulta diversa per ogni travetto.
Se l’interasse dei travetti d risulta molto piccolo rispetto alla luce della trave principale L
allora l’appoggio costituito dai travetti può essere schematizzato come un suolo elastico tipo
Winkler.
Si consideri ora la trave principale del graticcio, illustrata in figura:

3. TRAVE SU SUOLO ELASTICO
65
Figura 3.13: Schema strutturale della trave principale.
Il carico p(x) agente sulla trave è proporzionale alla reazione R che la trave esercita sui
travetti ed inversamente proporzionale alla distanza d tra i travetti. Il carico p(x) è dato dalla
seguente relazione:
(3.50)
L’equazione della linea elastica alle derivate quarte per la struttura in esame risulta:
(3.51)
Sostituendo si ottiene:
(3.52)
Definendo le seguenti quantità:
(3.53)
si ottiene la seguente relazione:
(3.54)
La soluzione dell’equazione differenziale di ordine IV a coefficienti costanti (3.54) costituisce
la soluzione del problema del graticcio di travi.
Se tutti i travetti sono soggetti allo stesso carico Q (ipotesi aggiuntiva che viene introdotta
ora), allora la quantità q0 è una quantità costante e la (3.54) può essere riscritta nella forma:
(3.55)
dove:
(3.56)
è il rapporto fra la rigidezza del supporto elastico e la rigidezza della trave (come nel caso
della trave su suolo elastico: il suolo elastico è ora costituito dai travetti secondari).
La soluzione dell’equazione differenziale sarà la somma di un integrale particolare yP(x) e
dell’integrale generale dell’equazione omogenea associata y0(x), secondo la seguente
relazione:

3. TRAVE SU SUOLO ELASTICO
66
(3.57)
dove:
(3.58)
(3.59)
La soluzione del problema risulta nota a meno di quattro costanti di integrazione che
possono essere determinate imponendo la congruenza con le condizioni al contorno di tipo
cinematico, rappresentate dalle seguenti relazioni:
Condizione al contorno 1 (3.60)
Condizione al contorno 2 (3.61)
Condizione al contorno 3 (3.62)
Condizione al contorno 4 (3.63)
Osservazione
L’interazione fra la trave e i travetti dipende principalmente dallo spostamento verticale y(x)
della trave: per i travetti prossimi agli incastri esso sarà ridotto e la trave costituirà un
appoggio più rigido, mentre in corrispondenza della mezzeria, dove la trave si deforma
maggiormente, i travetti trasmetteranno una reazione R minore e risulteranno, quindi, più
sollecitati.
Osservazione
Nel caso in cui la trave principale non abbia gli estremi incastrati ma semplicemente
appoggiati, la trave avrà una rigidezza k diversa e saranno necessarie nuove condizioni al
contorno [y(0) = y’’(0) = y(L) = y’’(L) = 0].