
2008 Matthieu Maitre - University Of...
139
2008 Matthieu Maitre
Transcript of 2008 Matthieu Maitre - University Of...

© 2008 Matthieu Maitre

“TRAVELLING WITHOUT MOVING”:A STUDY ON THE RECONSTRUCTION, COMPRESSION, ANDRENDERING OF 3D ENVIRONMENTS FOR TELEPRESENCE
BY
MATTHIEU MAITRE
Diplome d’ingenieur, Ecole Nationale Superieure de Telecommunications, 2002M.S., University of Illinois at Urbana-Champaign, 2002
DISSERTATION
Submitted in partial fulfillment of the requirementsfor the degree of Doctor of Philosophy in Electrical and Computer Engineering
in the Graduate College of theUniversity of Illinois at Urbana-Champaign, 2008
Urbana, Illinois
Doctoral Committee:
Assistant Professor Minh N. Do, ChairYoshihisa Shinagawa, Siemens Medical Solutions USA, IncProfessor Douglas L. JonesProfessor Thomas HuangProfessor Narendra Ahuja

ABSTRACT
In this dissertation, we study issues related to free-view 3D-video, and in partic-
ular issues of 3D scene reconstruction, compression, and rendering. We present
four main contributions. First, we present a novel algorithm which performs sur-
face reconstruction from planar arrays of cameras and generates dense depth maps
with multiple values per pixel. Second, we introduce a novel codec for the static
depth-image-based representation, which jointly estimates and encodes the un-
known depth map from multiple views using a novel rate-distortion optimization
scheme. Third, we propose a second novel codec for the static depth-image-based
representation, which relies on a shape-adaptive wavelet transform and an ex-
plicit representation of the locations of major depth edges to achieve major rate-
distortion gains. Finally, we propose a novel algorithm to extract the side infor-
mation in the context of distributed video coding of 3D scenes.
ii

To my families.
iii

ACKNOWLEDGMENTS
This thesis would not have been possible without the help and inspiration from
many people. First and foremost I would like to thank my thesis advisers, Profes-
sors Minh N. Do and Yoshihisa Shinagawa, for their guidance and precious advice
during the course of this study. I am also grateful to my committee members –
Professors Thomas Huang, Narendra Ahuja, and Douglas L. Jones – for the help
they gave me in defining the scope of this thesis.
I would like to thank the mentors I had the pleasure to work with during my
internships: Christine Guillemot and Luce Morin of the Irisa, and Michelle Yan,
Yunqiang Chen, and Tong Fang of Siemens Corporate Research (SCR).
I would like to express my appreciation to Jean Tourret, Robert West and
Professors Yizhou Yu, Bruce Hajek and Daniel M Liberzon for the suggestions they
offered me. I am grateful to my labmates at the Coordinated Science Laboratory
(CSL), the Beckman Institute, SCR, and Irisa for their assistance and friendships,
which made my stay in all these places most enjoyable.
I am also indebted to the staff of the Beckman Institute and CSL, and in
particular to John M. Hart, Barbara Horner, and Dan R. Jordan, for having taken
care of so many material details that made my work much easier. I would also like
to express my gratitude to the University of Illinois in general, for providing such
a rich and fulfilling research environment.
Although I never had the pleasure to meet them in person, I am grateful to
Frank Herbert [1] and Jamiroquai [2] for helping me find a title for this thesis.
iv

Finally, on the personal side, I would like to thank my three families: my wife,
for her love and patience; my parents and sister, for their constant encouragement;
and my parents-in-law, for all the enjoyable moments I spend with them.
v

TABLE OF CONTENTS
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . x
CHAPTER 1 INTRODUCTION . . . . . . . . . . . . . . . . . . . 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Problem Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Prior Art . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
CHAPTER 2 SYMMETRIC STEREO RECONSTRUCTIONFROM PLANAR CAMERA ARRAYS . . . . . . . . . . . . . . 82.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.2 Relation to Previous Work . . . . . . . . . . . . . . . . . . . . . . . 92.3 The Rectified Space . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.2 Rectification homographies . . . . . . . . . . . . . . . . . . . 13
2.4 Stereo Reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . 152.4.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.4.2 Geometric cost volume G(m,n) . . . . . . . . . . . . . . . . . 182.4.3 Photometric cost volume P (m,n) . . . . . . . . . . . . . . . . 19
2.5 Global Surface Representation . . . . . . . . . . . . . . . . . . . . . 222.5.1 Layered depth image . . . . . . . . . . . . . . . . . . . . . . 222.5.2 Sprites with depth . . . . . . . . . . . . . . . . . . . . . . . 23
2.6 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . 252.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
CHAPTER 3 WAVELET-BASED JOINT ESTIMATION ANDENCODING OF DIBR . . . . . . . . . . . . . . . . . . . . . . . 313.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . 353.3 Rate-Distortion Optimization . . . . . . . . . . . . . . . . . . . . . 41
3.3.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.3.2 Reference view . . . . . . . . . . . . . . . . . . . . . . . . . 423.3.3 One-dimensional disparity map . . . . . . . . . . . . . . . . 43
vi

3.3.4 Dynamic programming . . . . . . . . . . . . . . . . . . . . . 463.3.5 Two-dimensional disparity map . . . . . . . . . . . . . . . . 513.3.6 Bitrate optimization . . . . . . . . . . . . . . . . . . . . . . 533.3.7 Quality scalability . . . . . . . . . . . . . . . . . . . . . . . 54
3.4 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . 553.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
CHAPTER 4 JOINT ENCODING OF THE DIBR USING SHAPE-ADAPTIVE WAVELETS . . . . . . . . . . . . . . . . . . . . . . 654.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 654.2 Proposed Codec . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 674.3 Shape-Adaptive Wavelet Transform . . . . . . . . . . . . . . . . . . 684.4 Lifting Edge Handling . . . . . . . . . . . . . . . . . . . . . . . . . 724.5 Edge Representation and Coding . . . . . . . . . . . . . . . . . . . 734.6 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . 754.7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
CHAPTER 5 3D MODEL-BASED FRAME INTERPOLATIONFOR DVC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 795.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 795.2 3D Model Construction . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.2.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 825.2.2 Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 835.2.3 Camera parameter estimation . . . . . . . . . . . . . . . . . 845.2.4 Correspondence estimation . . . . . . . . . . . . . . . . . . . 875.2.5 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.3 3D Model-Based Interpolation . . . . . . . . . . . . . . . . . . . . . 915.3.1 Projection-matrix interpolation . . . . . . . . . . . . . . . . 925.3.2 Frame interpolation based on epipolar blocks . . . . . . . . . 925.3.3 Frame interpolation based on 3D meshes . . . . . . . . . . . 945.3.4 Comparison of the motion models . . . . . . . . . . . . . . . 95
5.4 3D Model-Based Interpolation with Point Tracking . . . . . . . . . 975.4.1 Rationale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.4.2 Tracking at the decoder . . . . . . . . . . . . . . . . . . . . 985.4.3 Tracking at the encoder . . . . . . . . . . . . . . . . . . . . 99
5.5 Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . 1005.5.1 Frame interpolation without tracking (3D-DVC) . . . . . . . 1015.5.2 Frame interpolation with tracking at the encoder (3D-DVC-
TE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1025.5.3 Frame interpolation with tracking at the decoder (3D-DVC-
TD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1065.5.4 Rate-distortion performances . . . . . . . . . . . . . . . . . 107
5.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1095.7 Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
vii

CHAPTER 6 CONCLUSION . . . . . . . . . . . . . . . . . . . . . 111
APPENDIX A FIXING THE PROJECTIVE BASIS . . . . . . 112
APPENDIX B BUNDLE ADJUSTMENT . . . . . . . . . . . . . 113
APPENDIX C PUBLICATIONS . . . . . . . . . . . . . . . . . . 115C.1 Journals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115C.2 Conferences . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115C.3 Research Reports . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
AUTHOR’S BIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . 125
viii

LIST OF TABLES
2.1 Performances on the Middlebury dataset with two cameras (fromtop to bottom: percentage of erroneous disparities over all areasfor the proposed method, percentage for the best method on eachimage, and ranks of the proposed method). . . . . . . . . . . . . . . 27
2.2 Percentage of erroneous disparities over all areas on Tsukuba forseveral multicamera methods. The proposed method achieves com-petitive error rates and scales with the number of cameras. . . . . . 27
2.3 Number of disparity values in a standard disparity map and in anLDI, for various numbers of cameras on Tsukuba. Using an LDI and25 cameras increases the area of reconstructed surfaces by almost20%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1 Analysis and synthesis operators of the Laplace (L) and Sequential(S) transforms (see text for details). . . . . . . . . . . . . . . . . . . 44
5.1 Average PSNR (in dB) of interpolated frames using lossless keyframes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
ix

LIST OF FIGURES
1.1 Two state-of-the-art telepresence systems. This dissertation intro-duces methods aimed at enabling realistic, interactive, and large-scale telepresence systems (images reproduced from [3, 4]). . . . . . 2
1.2 Overview of the proposed 3D-video system. At each client, a 3Dscene is recorded by multiple cameras whose data is compressedusing images and depth models. This information is sent to thenetwork, along with data from other input devices. The networkaggregates across clients and performs physics-based simulation be-fore sending the data back to the clients. Each client then ren-ders the data and displays. Users are able to freely choose theviewpoint. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Research areas related to free-view 3D-video. . . . . . . . . . . . . . 5
2.1 A few rays of light in the rectified 3D space: rays passing throughthe optical centers of camera (0, 0) (a) and camera (1, 0) (b). Therays are aligned with the voxel grid, which simplifies visibility com-putations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Rectification of four images from the toy sequence. After rectifica-tion, both the rows and the columns of the images are aligned. . . . 16
2.3 Camera MRF associated with a 2 × 4 camera array. Each noderepresents a camera with an observed image I and a hidden disparitymap D. Edges represent fusion functions. . . . . . . . . . . . . . . . 16
2.4 A simple example demonstrating the behavior of the occlusion model.Perfect disparity maps are obtained in two iterations. . . . . . . . . 20
2.5 Cropped disparity maps computed on Tsukuba with five camerasforming a cross. The proposed photometric cost reduces the dispar-ity errors due to partial occlusions. . . . . . . . . . . . . . . . . . . 20
2.6 The 3-layer LDI obtained on Tsukuba with 25 cameras. By treatingall the cameras symmetrically, the proposed algorithm recovers largeareas, which may be occluded in the central camera. . . . . . . . . . 22
2.7 Examples of sprites extracted from the LDI of Tsukuba with 25cameras. Note the absence of occlusion on the cans. . . . . . . . . . 24
2.8 Disparity map obtained from the four rectified images of the toysequence shown in Figure 2.2. . . . . . . . . . . . . . . . . . . . . . 25
x

2.9 Disparity maps obtained on the Middlebury dataset with two cam-eras. The occlusion model leads to sharp and accurate depth dis-continuities. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.10 Number of disparity values per pixel on Tsukuba (black: no value,white: 3 values). The area of the reconstructed surfaces increaseswith the number of cameras. . . . . . . . . . . . . . . . . . . . . . . 28
2.11 Cropped textures extracted from the LDIs of Tsukuba. Occlusionsshrink when the number of cameras increases. . . . . . . . . . . . . 29
3.1 Overview of the proposed codec: the encoder takes multiple viewsand jointly estimates and encodes a depth map together with areference image (the DIBR). The output DIBR can be used to renderfree viewpoints. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2 The spatial extent of a ROI (sphere) with one pair of image anddepth map, along with seven views (cones). The central dark conedesignates the reference view. The planes represent iso-depth sur-faces (3D model reproduced with permission from Google 3D Ware-house). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.3 The projection of an iso-depth plane onto two views gives rise to amotion field between the two which is a 2D homography. . . . . . . 38
3.4 An error matrix E from the Tsukuba image set with two optimalpaths overlaid, λ = 0 (dashed) and λ = ∞ (solid). Lighter shadesof gray indicate larger squared intensity differences. . . . . . . . . . 44
3.5 Dependency graph of a three-level L transform. The coefficientsin bold are those included in the wavelet vector d. Gray nodesrepresent the MSE and rate terms of the RD optimization. Thedashed box highlights the two-level L transform associated with(3.22). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.6 Dependency graph of a three-level S transform. The coefficientsin bold are those included in the wavelet vector d. Gray nodesrepresent the MSE and rate terms of the RD optimization. . . . . . 47
3.7 Two divisions of the frequency plane and the associated graphs ofdependencies between the coefficients of the S transform. . . . . . . 52
3.8 The two sets of images used in the experiments. . . . . . . . . . . . 563.9 Disparity map of the Teddy set at four resolution levels, showing
the resolution scalability of the wavelet-based representation. . . . . 573.10 The DIBR of the Teddy set at three RD slopes corresponding to
reference-view bitrates of 0.1 bpp, 0.5 bpp, and 1.0 bpp (from leftto right). The S and L transforms generate disparity maps thatdegrade gracefully with the bitrate and contain less spurious noisethan quadtrees or blocks. . . . . . . . . . . . . . . . . . . . . . . . . 59
xi

3.11 The DIBR of the Tsukuba set at three RD slopes corresponding toreference-view bitrates of 0.1 bpp, 0.5 bpp, and 1.0 bpp (from leftto right). The S and L transforms generate disparity maps thatdegrade gracefully with the bitrate and contain less spurious noisethan quadtrees or blocks. . . . . . . . . . . . . . . . . . . . . . . . . 60
3.12 Views synthesized from the DIBR with a reference view encoded at0.5 bpp and differences with the original views. At low quantizationnoise, the errors are mostly due to occlusions and disocclusions. . . 61
3.13 Rate-distortion performances of the encoders based on wavelets (Sand L transforms), quadtrees, and blocks. Wavelets are superior toquadtrees and blocks in the case of larger disparity ranges. . . . . . 62
3.14 RD loss due to quality-scalable coding. The loss remains limitedover the whole range of bitrates. . . . . . . . . . . . . . . . . . . . . 63
3.15 Fraction of the bitrate allocated to the disparity maps. Except atvery low bitrates, the rate ratios are stable with values between 13%and 23%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.1 Input data of the proposed DIBR codec: shared edges superimposedover a depth map (a) and an image (b). . . . . . . . . . . . . . . . . 66
4.2 Overview of the proposed encoder. It relies on a SA-DWT and anedge coder (gray boxes) to reduce data correlations, both withinand between the image and the depth map. . . . . . . . . . . . . . 68
4.3 Comparison of standard and shape adaptive DWTs. In the lattercase, all but the coarsest high-pass band are zero. . . . . . . . . . . 70
4.4 The four lifting steps associated with a 9/7 wavelet, which trans-form the signal x first into a and then into y. The values x2t+2
and a2t+2 on the other side of the edge (dashed vertical line) areextrapolated. They have dependencies with the values inside thetwo dashed triangles. . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.5 Example of the dual lattices of samples and edges. Each edge in-dicates the statistical independence of the two half rows or halfcolumns of samples it separates. . . . . . . . . . . . . . . . . . . . . 74
4.6 Absolute values of the high-pass coefficients of the depth map usingstandard and shape-adaptive wavelets. The latter provides a muchsparser decomposition. . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.7 Reconstruction of the depth map at 0.04 bpp using standard andshape-adaptive wavelets. The latter gives sharp edges free of Gibbsartifacts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.8 Rate-distortion performances of standard and shape-adaptive wave-lets. The latter gives PSNR gains of up to 5.46 dB on the depthmap and 0.19 dB on the image. . . . . . . . . . . . . . . . . . . . . 78
5.1 Outline of the codec without point tracking (3D-DVC). The pro-posed codec benefits from an improved motion estimation and frameinterpolation (gray boxes). . . . . . . . . . . . . . . . . . . . . . . . 83
xii

5.2 Outline of the 3D model construction. . . . . . . . . . . . . . . . . 835.3 Correspondences and epipolar geometry between the two first loss-
less key frames of the sequences street and stairway. Feature pointsare represented by red dots, motion vectors by magenta lines endingat feature points, and epipolar lines by green lines centered at thefeature points. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.4 Trifocal transfer for epipolar block interpolation. . . . . . . . . . . . 935.5 Outline of the frame interpolation based on epipolar blocks. . . . . 945.6 Outline of the frame interpolation based on 3D meshes. . . . . . . . 955.7 Norm of the motion vectors between the first two lossless key frames
of the stairway sequence for epipolar block matching (a), 3D meshfitting (b), and classical 2D block matching (c). . . . . . . . . . . . 96
5.8 Outline of the codec with tracking at the decoder (3D-DVC-TD). . 985.9 Outline of the codec with tracking at the encoder (3D-DVC-TE). . 995.10 Correspondences and epipolar geometry between the two first key
frames of the sequence statue. Feature points are represented byred dots, motion vectors by magenta lines ending at feature points,and epipolar lines by green lines centered at the feature points. . . . 101
5.11 PSNR of interpolated frames using lossless key frames (from topto bottom: sequences street, stairway, and statue). Missing pointscorrespond to key frames (infinite PSNR). . . . . . . . . . . . . . . 103
5.12 Correlation noise for GOP 1, frame 5 (center of the GOP) of thestairway sequence, using lossless key frames: 2D-DVC with classicalblock matching (a), 3D-DVC with mesh model and linear tracks (b),3D-DVC-TE with mesh model and tracking at the encoder (c), and3D-DVC-TD with mesh model and tracking at the decoder (d). Thecorrelation noise is the difference between the interpolated frame andthe actual WZ frame. . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.13 PSNR of key frames and interpolated frames of the street sequenceusing 3D-DVC-TE with mesh fitting on lossy key frames. Peakscorrespond to key frames. . . . . . . . . . . . . . . . . . . . . . . . 105
5.14 Variation of the subjective quality at QP = 26 between a key frame(frame 1) and an interpolated frame (frame 5). In spite of a PSNRdrop of 8.1 dB, both frames have a similar subjective quality. . . . . 106
5.15 Rate-distortion curves for H.264/AVC intra, H.264/AVC inter-IPPPwith null motion vectors, H.264/AVC inter-IPPP, 2D-DVC I-WZ-I, and the three proposed 3D codecs (top left: street, top right:stairway, bottom: statue). . . . . . . . . . . . . . . . . . . . . . . . 108
xiii
CHAPTER 1
INTRODUCTION
1.1 Motivation
Travel by physical motion was the only way human beings originally had to ex-
perience and modify the world that surrounded them. However, physical motion
suffers from several issues, the most conspicuous one probably being its slow speed.
Even using the fastest planes, intercontinental flights still take several hours. Fa-
tigue is also an issue. Long-haul travelers suffer from jet lag, and drivers lose their
attention after just a few hours of driving. Moreover, physical motion has high
energetic requirements, especially from fossil fuels, which strain environmental and
geopolitical equilibria.
Traveling without moving [1,2] – that is, being able to go to any place instantly
– would solve all these issues. Unfortunately, this has so far only been possible in
works of fiction [1]. The next best thing is then virtual travel, where a proxy, say
eletromagnetic waves, moves while we stay in place. This is the fundamental idea
behind telecommunication.
Through inventions like the telegraph, the telephone, the television, and the
internet, to name a few, our ability to shift stimuli like sound and light from one
place to another has been greatly improved. It has reached a point where both
places, the local one and the distant one, can look as if they only formed one,
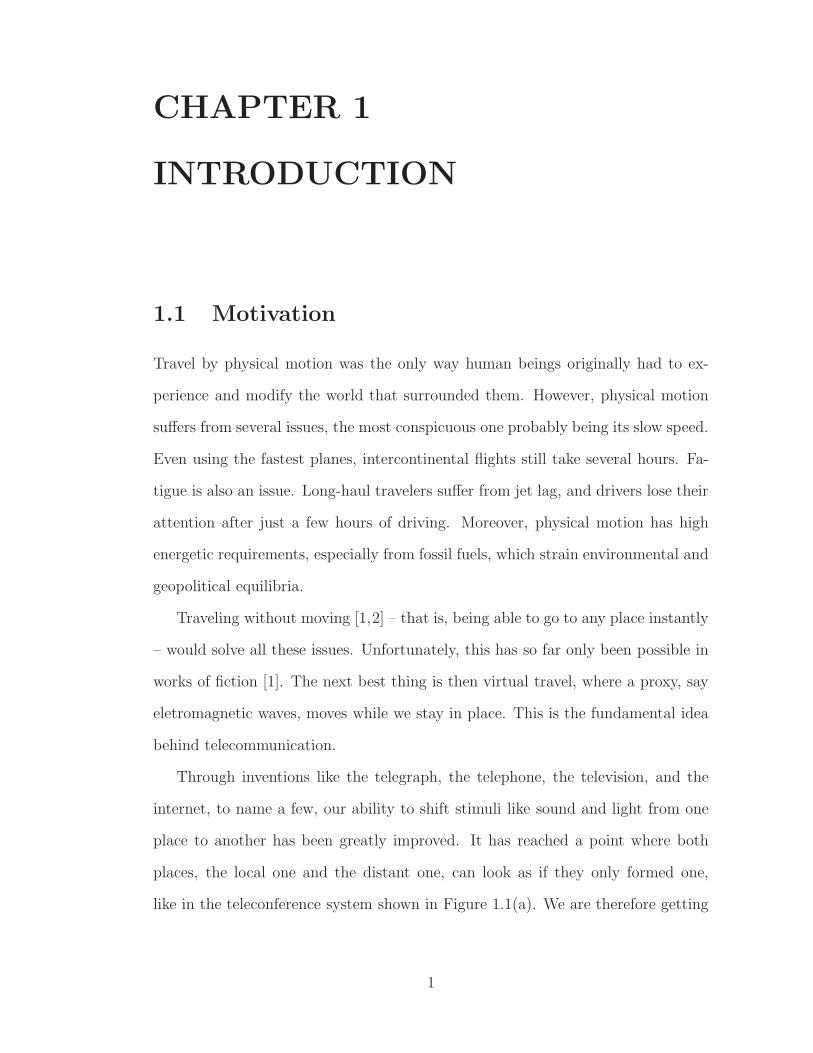
like in the teleconference system shown in Figure 1.1(a). We are therefore getting
1

(a) HP’s Halo: a highly realistic system withlimited interactivity within room-size worlds.
(b) Linden Lab’s Second Life: a highly in-teractive system with limited realism withinlarge-scale worlds.
Figure 1.1: Two state-of-the-art telepresence systems. This dissertation intro-duces methods aimed at enabling realistic, interactive, and large-scale telepresencesystems (images reproduced from [3, 4]).
closer to a complete telepresence experience, in which it would not be possible to
distinguish the real world from its reproduced version.
At least three shortcomings remain in current telepresence technologies. First,
they are not able to convey stereopsis, that is, the sensation of depth. Videos are
still overwhelmingly limited to two spatial dimensions. Second, they do not offer
mobility. Users usually have to view the distant environment from a fixed point of
view, that of the camera, and cannot move inside this environment. Third, they
provide limited interactivity, only shifting stimuli from one place to another. A
full telepresence system would also shift actions, to let users modify the distant
environment.
These shortcomings would be simple to solve if the distant environment was
a virtual one, like those created for video games or the online 3D world shown
in Figure 1.1(b). In virtual environments, the stimuli delivered to the users are
rendered from a mathematical representation of these environments. Stereopsis
is then simply achieved by rendering from two slightly different points of view,
mobility amounts to applying a rigid transformation to the data, and interactivity
2
is obtained by simulating the laws of physics and transforming the data in an
appropriate manner.
Virtual environments have an additional advantage over real ones: the laws
of physics which govern them can be freely designed. They therefore offer new
possibilities, like providing safe learning environments where one can never get
hurt, be injured, or die. In such environments, professionals like surgeons, chemists,
firefighters, military personel, etc., can receive training which would not be possible
in the real world.
The shortcoming of existing virtual environments lies in their lack of realism:
they look too synthetic to make telepresence a believable experience. If we could
find a way to integrate the data from telepresence systems inside virtual environ-
ments, or at least the most important data, we would obtain a trade-off achieving
at the same time realism, stereopsis, mobility, and interactivity.
Developing such technologies would also be beneficial to other applications,
including 3D television. This recent televisual technology, which conveys stereopsis
to the viewers and may give some degree of freedom in the choice of the point of
view, is seen as the next evolution of television after high-definition. It has recently
received a lot of interest, both from the industry [5,6], academic institutions [7–9],
and standardization organizations [10].
1.2 Problem Statement
In this thesis, we focus on the problem of integrating real objects into virtual
worlds, and study in particular its visual aspects. The major issue at hand is the
massive amount of data needed to represent the visual characteristics of objects.
Fortunately, the space in which visual representations lie, called the plenoptic
function [11], has a strong structure that we can take advantage of to obtain
3

Figure 1.2: Overview of the proposed 3D-video system. At each client, a 3Dscene is recorded by multiple cameras whose data is compressed using images anddepth models. This information is sent to the network, along with data from otherinput devices. The network aggregates across clients and performs physics-basedsimulation before sending the data back to the clients. Each client then rendersthe data and displays. Users are able to freely choose the viewpoint.
manageable representations. We follow a hybrid geometric/photometric approach,
which allows the scene to be recorded from a reduced number of cameras and
enables compact data representations, at the expense of lesser realism.
The proposed 3D video system includes the different components shown in Fig-
ure 1.2: multiple view recording, 3D scene reconstruction, compression for stor-
age/transmission, rendering, and display. In this thesis, we focus on the aspects of
3D reconstruction, compression, and rendering. The main issue here comes from
the ill-posed nature of the 3D reconstruction, which makes it difficult to obtain
reliable 3D models able to efficiently approximate the plenoptic function.
4
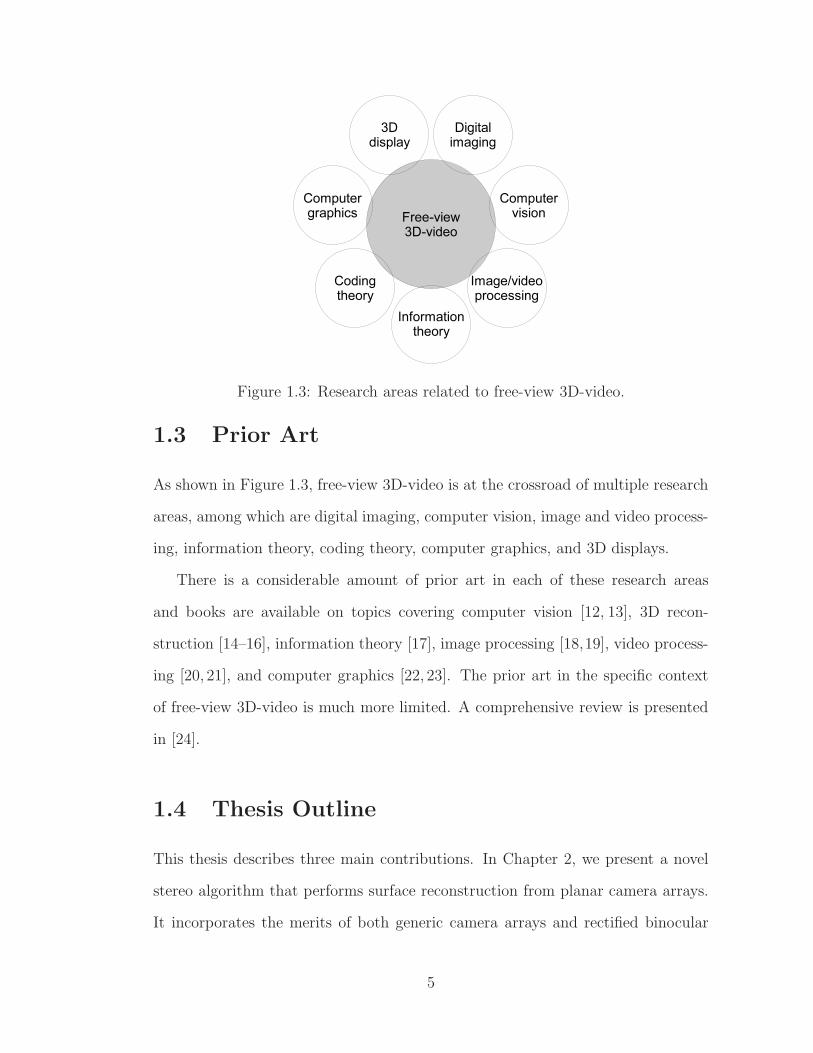
Figure 1.3: Research areas related to free-view 3D-video.
1.3 Prior Art
As shown in Figure 1.3, free-view 3D-video is at the crossroad of multiple research
areas, among which are digital imaging, computer vision, image and video process-
ing, information theory, coding theory, computer graphics, and 3D displays.
There is a considerable amount of prior art in each of these research areas
and books are available on topics covering computer vision [12, 13], 3D recon-
struction [14–16], information theory [17], image processing [18,19], video process-
ing [20, 21], and computer graphics [22, 23]. The prior art in the specific context
of free-view 3D-video is much more limited. A comprehensive review is presented
in [24].
1.4 Thesis Outline
This thesis describes three main contributions. In Chapter 2, we present a novel
stereo algorithm that performs surface reconstruction from planar camera arrays.
It incorporates the merits of both generic camera arrays and rectified binocular
5

setups, recovering large surfaces like the former and performing efficient computa-
tions like the latter. First, we introduce a rectification algorithm which gives free-
dom in the design of camera arrays and simplifies photometric and geometric com-
putations. We then define a novel set of data-fusion functions over 4-neighborhoods
of cameras, which treat all cameras symmetrically and enable standard binocular
stereo algorithms to handle arrays with an arbitrary number of cameras. In par-
ticular, we introduce a photometric fusion function that handles partial visibility
and extracts depth information along both horizontal and vertical baselines. Fi-
nally, we show that layered depth images and sprites with depth can be efficiently
extracted from the rectified 3D space. Experimental results on real images confirm
the effectiveness of the proposed method, which reconstructs dense surfaces 20%
larger than classical stereo methods on Tsukuba.
In Chapter 3, we propose a wavelet-based codec for the static depth-image-
based representation (DIBR), which allows viewers to freely choose the viewpoint.
The proposed codec jointly estimates and encodes the unknown depth map from
multiple views using a novel rate-distortion (RD) optimization scheme. The rate
constraint reduces the ambiguity of depth estimation by favoring piecewise-smooth
depth maps. The optimization is efficiently solved by a novel dynamic program-
ming along the tree of integer wavelet coefficients. The codec encodes the image
and the depth map jointly to decrease their redundancy and to provide an RD-
optimized bitrate allocation between the two. The codec also offers scalability
both in resolution and in quality. Experiments on real data show the effectiveness
of the proposed codec.
In Chapter 4, we present a novel codec of depth-image-based representations
for free-viewpoint 3D-TV. The proposed codec relies on a shape-adaptive wavelet
transform and an explicit representation of the locations of major depth edges.
Unlike classical wavelet transforms, the shape-adaptive transform generates small
6

wavelet coefficients along depth edges, which greatly reduces the data entropy. The
codec also shares the edge information between the depth map and the image to
reduce their correlation. The wavelet transform is implemented by shape-adaptive
lifting, which enables fast computations and perfect reconstruction. Experimental
results on real data confirm the superiority of the proposed codec, with PSNR gains
of up to 5.46 dB on the depth map and up to 0.19 dB on the image compared to
standard wavelet codecs.
Finally in Chapter 5, we consider the reconstruction, compression, and render-
ing from a unique camera moving in a static 3D environment. In particular, we
address the problem of side information extraction for distributed coding of videos.
Two interpolation methods constrained by the scene geometry, i.e., based either
on block matching along epipolar lines or on 3D mesh fitting, are first developed.
These techniques are based on a sub-pel robust algorithm for matching feature
points between key frames. The robust feature point matching technique leads
to semidense correspondences between pairs of consecutive key frames. However,
the underlying assumption of linear motion leads to misalignments between the
side information and the actual Wyner-Ziv frames, which impacts the RD perfor-
mances of the 3D model-based DVC solution. A feature point tracking technique
is then introduced at the decoder to recover the intermediate camera parameters
and cope with these misalignments problems. This approach, in which the frames
remain encoded separately, leads to significant RD performance gains. The RD
performances are then further improved by allowing limited tracking at the en-
coder. When the tracking is performed at the encoder, tracking statistics also
serve as criteria for the encoder to adapt the key frame frequency to the video
motion content.
7

CHAPTER 2
SYMMETRIC STEREORECONSTRUCTION FROMPLANAR CAMERA ARRAYS
2.1 Introduction
Online metaverses have emerged as a way to bring an immersive and interactive
3D experience to a worldwide audience. However, the fully automatic creation
of realistic content for these metaverses is still an open problem. The challenge
here is to achieve simultaneously four goals. First, the rendering quality must be
high for the virtual world to look realistic. Second, the geometric quality must
be sufficient to let physics-based simulation provide credible interactions between
objects. Third, the computational complexity must be simple enough to enable
real-time rendering. Finally, the data must admit a compact representation to
allow data streaming across networks.
In this chapter, we propose three contributions toward these goals. First, we
introduce a special rectified 3D space and an associated rectification algorithm
that handles planar arrays of cameras. It gives freedom in the design of camera
arrays, so that their fields of view can be adapted to the scene being recorded. At
the same time, rectification simplifies the reconstruction problem by making the
coordinates of voxels and their pixel projection integers. This removes the need for
further data resampling and simplifies changes of coordinate systems and visibility
computations.
Second, we present a set of data-fusion functions that enable standard binocular
stereo reconstruction [25] to handle arrays with arbitrary number of cameras. Using
8

one depth map per camera, the algorithm reconstructs large surfaces, up to 20%
larger on Tsukuba, and therefore reduces the holes in novel-view synthesis. We
introduce two Markov random fields (MRF), a classical one over the arrays of pixels
and a novel one over the array of cameras. The latter lets us treat all the cameras
symmetrically by defining fusion functions over 4-neighborhoods of cameras.
Finally, we introduce a global fusion algorithm that merges the depth maps into
a unique layered depth image (LDI) [26], a rich but compact data representation
made of a dense depth map with multiple values per pixel. We also show that the
recovered LDI can be segmented fully automatically into sprites with depth [26].
Such sprites are related to geometry images, which can be efficiently rendered and
compressed [27].
The remainder of the chapter is organized as follows. Section 2.2 presents the
previous work, while Section 2.3 describes the rectified space and the rectifica-
tion homographies. Section 2.4 follows with the proposed stereo reconstruction
algorithm, and Section 2.5 with the creation of a global surface model. Finally,
Section 2.6 presents the experimental results.
2.2 Relation to Previous Work
Surface reconstruction methods fall into two categories, those based on large
generic camera arrays and those based on small rectified stereo setups, most of-
ten binocular, where the optical camera axes are normal to the baseline. The
former [28, 29] handle rich depth information and can reconstruct large surfaces.
However, the genericity of the camera locations makes visibility computations dif-
ficult and voxel projections computationally expensive.
In rectified stereo setups [25, 30, 31], on the other hand, visibility and projec-
tions are simple. These setups also allow efficient reconstruction algorithms based
9

on maximum a-posteriori (MAP) inference over MRFs. However, the depth in-
formation extracted from the images tends to be quite poor, especially for linear
arrays which only take advantage of textures with significant gradients along their
baseline. Moreover, the small number of cameras and the constrained viewing
direction strongly limits the volume inside which depth triangulation is possible.
The constraint on the viewing direction can be removed using rectification,
which trades view freedom for image distortion. So far, however, rectification has
been limited to small stereo setups with two [32, 33] or three [34, 35] cameras.
In this chapter, we introduce a special rectified 3D space and show that when
the problem is defined in terms of transformations between 3D spaces, instead of
alignment of epipolar lines, rectification can be generalized to planar arrays with
arbitrary number of cameras.
Camera arrays have access to much richer information than binocular setups.
Quite surprisingly, however, the extra information can prove to be detrimental and
actually reduce the quality of reconstructed surfaces [36]. The issue comes from
partially visible voxels, whose number increases with the number of cameras. A
number of methods tackle this issue [36–38]. However, most of them are asym-
metric, choosing one camera as a reference. Cameras far apart tend to have less
visible surfaces in common, which limits the number of cameras in the array and,
as a consequence, the area of reconstructed surfaces. Moreover, many multiview
stereo methods disregard the relative locations of the cameras when extracting the
depth information from images [28,39], which reduces the discriminative power of
the extracted information.
In the proposed method, we rely on multiple depth maps, one per camera, and
treat all the cameras symmetrically. Furthermore, we define a novel MRF over
the camera array and take into account the relative locations of the cameras. This
10

way, the proposed method handles arrays with arbitrary number of cameras and
extracts the depth information along both horizontal and vertical baselines.
Surface reconstruction based on multiple depth maps has already been studied
in [39–41] but these methods lacked the proposed rectified 3D space, which led to
costly operations to compute visibility, enforce intercamera geometric consistency,
and merge depth maps.
The proposed extraction of sprites from LDIs is related to depth map segmenta-
tion [42], with the added complexity of multiple depth values per pixel. Moreover,
unlike [43], the segmentation is performed automatically and is not limited to
planar surfaces.
2.3 The Rectified Space
2.3.1 Overview
We first consider the problem of rectifying the 3D space and the 2D camera im-
ages to simplify the stereo reconstruction problem. In the following, points are
represented in homogeneous vectors, with x , (x, y, 1)⊺ denoting a point on the
2D image plane and X , (x, y, z, 1)⊺ a point in 3D space. Points are defined up to
scale: x and λx are equivalent for any nonnull scalar λ. This relation is denoted
by the symbol ‘∼’.
Under the pin-hole camera model [33], a 3D point X and its projection x onto
an image plane are related by
x ∼ PX (2.1)
where P is a 3× 4 matrix which can be decomposed as
P = KR
(
I −c
)
(2.2)
11

where I is the identity matrix, R the camera rotation matrix, c the optical center,
and K the matrix of intrinsic parameters. All these parameters are assumed known.
The optical centers of the cameras are assumed to lie on a planar lattice, that
is,
c = o + mv1 + nv2 (2.3)
where o is the center of the grid, v1 and v2 are two noncollinear vectors, and m
and n are two signed integers. The classical stereo pair is a special case of such
an array. Since a pair (m, n) uniquely identifies a camera, we use it to index the
cameras and denote by C the set of pairs (m, n).
The proposed rectification consists in rotating the cameras and transforming
the Euclidean 3D space using homographies. The rectified 3D space is defined as
a space where the projection matrices P(m,n) take the special form
P(m,n) =
1 0 −m 0
0 1 −n 0
0 0 0 1
. (2.4)
It follows that, in the rectified space, a 3D point X = (x, y, d, 1)⊺ is related to
its 2D projection x(m,n) =(
x(m,n), y(m,n), 1)⊺
on the image plane of camera (m, n)
by the equations
x(m,n) = x−md,
y(m,n) = y − nd.
(2.5)
The 2D motion vectors of image points from camera (m, n) to camera (m′, n′)
are equal to d times the baseline (m−m′, n−n′)⊺. Therefore, the third coordinate d
of the rectified 3D space is a disparity, while the third coordinate z of the Euclidean
space is a depth.
The projection of an integer-valued point X is also an integer. Moreover, the
12

Figure 2.1: A few rays of light in the rectified 3D space: rays passing through theoptical centers of camera (0, 0) (a) and camera (1, 0) (b). The rays are alignedwith the voxel grid, which simplifies visibility computations.
rays of light passing through the optical centers are parallel to one another and
fall on integer-valued 3D points, as shown in Figure 2.1, which simplifies visibility
computations.
2.3.2 Rectification homographies
First, we need to recover the grid parameters o, v1, and v2 from the projection
matrices P(m,n). From (2.3), we obtain the system of equations
(
I mI nI
)
o
v1
v2
= c(m,n), ∀(m, n) ∈ C. (2.6)
In the general case, this system is over-constrained and the vectors are obtained
by least mean-square. When the cameras are collinear, one of the vectors is free
to take any value. In that case, the constrained vector is computed by least mean-
square and the free vector is chosen to limit the image distortion. To do so, the
normal vector defined by the cross-product v1 ∧ v2 is set to the mean of the unit
vectors on the optical axes. The free vector is then deduced by Gram-Schmidt
orthogonalization.
We define an intrinsic-parameter matrix K shared by all the rectified cameras
13

as
K ,
f 0 0
0 f 0
0 0 1
(2.7)
where f is the rectified focal length. We also define a matrix V as V , (v1, v2, v1∧
v2) and two 4D homography matrices H1 and H2 as
H1 ,
KV−1 −KV−1o
0 f
, (2.8)
H2 ,
1 0 0 0
0 1 0 0
0 0 0 1
0 0 1 0
. (2.9)
The rectified focal length f is chosen as the mean focal length f of the actual
cameras.
Multiplying (2.1) by KV−1R(m,n)−1K(m,n)−1, introducing I = H−11 H−1
2 H2H1
between P and X, and using the relation Kc(m,n) = f c(m,n), we obtain
KV−1R(m,n)−1K(m,n)−1x(m,n) ∼ P(m,n)H2H1X. (2.10)
By identification, we obtain the relations between Euclidean and rectified quan-
tities
x(m,n) ∼ KV−1R(m,n)−1K(m,n)−1x(m,n), (2.11)
X ∼ H2H1X (2.12)
which are two homographies.
14

The reconstruction of surfaces in the Euclidean space via depth estimation
in the rectified space is then a three-step process. First, images are rectified by
applying the homography (2.11). Then 3D points are estimated in the rectified
space by matching the rectified images. Finally, these 3D points are transfered
back to the Euclidean space by inverting the homography (2.12). Figure 2.2 shows
an example of rectified images.
2.4 Stereo Reconstruction
2.4.1 Overview
We now turn to the stereo reconstruction. In this section, we assume that the
images have been rectified and we drop the hat over mathematical symbols in the
rectified space.
In order to reduce the computational complexity, the dependencies between
cameras in the array are modeled using a MRF where each camera (m, n) is asso-
ciated with an image I(m,n) and a disparity map D(m,n), as shown in Figure 2.3.
Specifically, each value D(m,n)x,y represents the disparity of a 3D point along the ray
of light passing by pixel (x, y) in camera (m, n). At each camera, the dependencies
between pixels are also modeled using a MRF. Stereo reconstruction then aims at
inferring the hidden disparity maps from the observed images, relations between
occupancy and visibility, unicity of the reconstructed scene, and the Markov priors.
An approximate solution is obtained by an iterative process, at the heart of
which lie classical MAP-MRF inferences [30,31,41] applied independently on each
camera. Each inference aims at solving an optimization of the form
minD
∑
(x,y)∈P
(
Px,y,Dx,y+ λgGx,y,Dx,y
+ Sx,y(D))
(2.13)
15

(a) Original images
(b) Rectified images
Figure 2.2: Rectification of four images from the toy sequence [44]. After rectifi-cation, both the rows and the columns of the images are aligned.
I(−1,0)
D(−1,0)
I(0,0)
D(0,0)
I(1,0)
D(1,0)
I(2,0)
D(2,0)
I(−1,1)
D(−1,1)
I(0,1)
D(0,1)
I(1,1)
D(1,1)
I(2,1)
D(2,1)
Figure 2.3: Camera MRF associated with a 2× 4 camera array. Each node repre-sents a camera with an observed image I and a hidden disparity map D. Edgesrepresent fusion functions.
16

where P denotes the set of 2D pixels, λg is a scalar weight, S is a clique po-
tential favoring piecewise-smoothness [30], and Px,y,d and Gx,y,d are respectively
photometric and geometric cost volumes.
The proposed algorithm alternates between inferences and cost volume com-
putations. Its novelty lies in the set of fusion functions computing the costs vol-
umes. Due to the Markov assumption, the fusion functions are defined over 4-
neighborhoods N4, i.e., cross-shaped groups of five cameras, which usually contain
rich depth information but only limited partial occlusions. The overall complexity
of the proposed algorithm is linear in the size of the data.
Although limited, partial occlusions tend to create large photometric costs at
voxels on the surfaces, which leads to erroneous disparities. These outlier costs can
be removed by an explicit visibility modeling [38]. However, visibility depends on
the surface geometry, which introduces a circular dependency. We solve this issue
by introducing an implicit model of partial occlusions, which does not depend on
the surface geometry.
Robust statistics over the four pairwise cliques of each camera 4-neighborhood
can reduce the impact of outlier costs. However, classical robust statistics do not
take into account the relative locations of the cameras and may fail to extract
the depth information along both horizontal and vertical baselines, leading to
photometric cost volumes with poor discriminative power.
Therefore, we propose a robust measure which strives to include the photo-
metric costs from at least one vertical and one horizontal camera clique at each
voxel. We do this by introducing an assumption we call “visibility by opposite
neighbors”: a voxel visible by a camera (m, n) is also visible by at least one of
its horizontal camera neighbors (m − 1, n) and (m + 1, n), and by at least one of
its vertical camera neighbors (m, n − 1) and (m, n + 1). This assumption usually
holds, except for instance for surfaces like picket fences or cameras having less than
17

four neighbors. In the following, we denote the quantities related to horizontal and
vertical pairwise cliques by the superscripts h and v, respectively.
2.4.2 Geometric cost volume G(m,n)
The geometric cost volumes G(m,n) favor consistent disparity maps. In order to
compute them, the disparity maps D(m,n)x,y are first transformed into binary occu-
pancy volumes δ(m,n)x,y,d , whose voxels take value one when they contain surfaces. An
occupancy volume δ(m,n)x,y,d is obtained by initializing it to zero, except at the set of
voxels {(x, y,D(m,n)x,y )} where it is initialized to one.
Since all the occupancy volumes represent the same surfaces, they should be
identical up to visibility and a change of coordinate system. Thanks to the rectifi-
cation leading to (2.5), changing the coordinate system of a volume δ from camera
(0, 0) to camera (m, n) is simply an integer 3D shear φ(m,n) given by
φ(m,n)x,y,d (δ) = δx+md,y+nd,d. (2.14)
A change of coordinate system between two arbitrary cameras is obtained by con-
catenating two 3D shears.
Let us consider camera (m, n) and shear the occupancy volumes of its 4-
neighbors to its coordinate system. Using the assumption of visibility by opposite
neighbors, erroneous occupancy voxels are removed using
δ(m,n)x,y,d ← δ
(m,n)x,y,d ∧
(
δ(m+1,n)x,y,d ∨ δ
(m−1,n)x,y,d
)
∧(
δ(m,n+1)x,y,d ∨ δ
(m,n−1)x,y,d
)
(2.15)
where ∨ and ∧ denotes respectively the “or” and “and” operators.
18
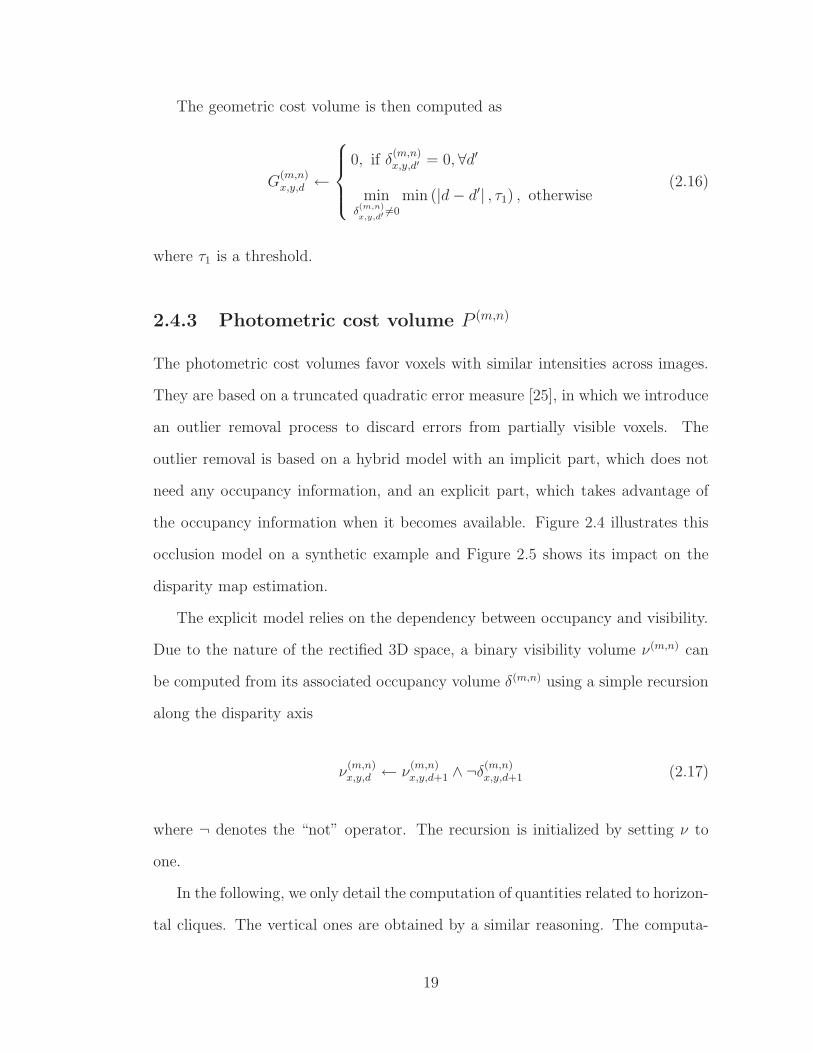
The geometric cost volume is then computed as
G(m,n)x,y,d ←
0, if δ(m,n)x,y,d′ = 0, ∀d′
minδ(m,n)
x,y,d′6=0
min (|d− d′| , τ1) , otherwise(2.16)
where τ1 is a threshold.
2.4.3 Photometric cost volume P (m,n)
The photometric cost volumes favor voxels with similar intensities across images.
They are based on a truncated quadratic error measure [25], in which we introduce
an outlier removal process to discard errors from partially visible voxels. The
outlier removal is based on a hybrid model with an implicit part, which does not
need any occupancy information, and an explicit part, which takes advantage of
the occupancy information when it becomes available. Figure 2.4 illustrates this
occlusion model on a synthetic example and Figure 2.5 shows its impact on the
disparity map estimation.
The explicit model relies on the dependency between occupancy and visibility.
Due to the nature of the rectified 3D space, a binary visibility volume ν(m,n) can
be computed from its associated occupancy volume δ(m,n) using a simple recursion
along the disparity axis
ν(m,n)x,y,d ← ν
(m,n)x,y,d+1 ∧ ¬δ
(m,n)x,y,d+1 (2.17)
where ¬ denotes the “not” operator. The recursion is initialized by setting ν to
one.
In the following, we only detail the computation of quantities related to horizon-
tal cliques. The vertical ones are obtained by a similar reasoning. The computa-
19

(a) Three images of two fronto-parallelplanes: a dark square in front of a brightbackground.
(b) Photometric cost at iteration 1: theimplicit model removes partial occlusionsin camera 1 and limits their impact incameras 0 and 2.
(c) Photometric cost at iteration 2: theexplicit model removes partial occlusionsin all the cameras.
(d) Disparity maps at iteration 1: errorsremain on cameras 0 and 2.
(e) Disparity maps at iteration 2: no errorremains.
Figure 2.4: A simple example demonstrating the behavior of the occlusion model.Perfect disparity maps are obtained in two iterations.
(a) Truncated quadratic cost (b) Proposed cost
Figure 2.5: Cropped disparity maps computed on Tsukuba with five cameras form-ing a cross. The proposed photometric cost reduces the disparity errors due topartial occlusions.
20

tions are conducted independently at each voxel, so we drop the subscript (x, y, d).
We define I(m,n) as the intensity volume obtained by replicating the image I(m,n)
along the disparity axis.
Let us consider the camera (m, n) and its 4-neighborhood. Using (2.14), the
intensity and visibility volumes are sheared to the coordinate system of camera
(m, n). From the truncated quadratic error model and the assumption of visibility
by opposite neighbors, an horizontal error volume Eh(m,n) is computed as
Eh(m,n) = min(
(
I(m,n) − I(m−1,n))2
,
(
I(m,n) − I(m+1,n))2
, τ2
)
(2.18)
where τ2 is a threshold.
The photometric cost Eh(m,n) may still contain large values when the assump-
tion of visibility by opposite neighbors is violated. Therefore, we further discard
outliers by explicitly computing visibility. Using De Morgan’s laws, the validity of
the costs is computed as
V h(m,n) = ¬ν(m,n) ∨ ν(m−1,n) ∨ ν(m+1,n). (2.19)
We now have two pairs of error and validity volumes, (Eh(m,n), V h(m,n)) hor-
izontally and (Ev(m,n), V v(m,n)) vertically. In order to create a photometric cost
volume which includes the depth information from both vertical and horizontal
texture gradients, we define this cost volume as the weighted average
P (m,n) =V h(m,n)Eh(m,n) + V v(m,n)Ev(m,n)
V h(m,n) + V v(m,n), (2.20)
which is only defined when at least one of the validity volumes takes a nonzero
value. Values at voxels where this is not the case are obtained by interpolation.
21

(a) Texture
(b) Disparity
Figure 2.6: The 3-layer LDI obtained on Tsukuba with 25 cameras. By treatingall the cameras symmetrically, the proposed algorithm recovers large areas, whichmay be occluded in the central camera.
2.5 Global Surface Representation
2.5.1 Layered depth image
Using the special nature of the 3D rectified space, we present a simple and efficient
procedure to merge the multiple disparity maps into a unique LDI [26]. The LDI
offers a compact and global surface representation. Figure 2.6 shows an example
of LDI.
To begin with, the disparity maps D(m,n) are transformed into occupancy vol-
umes δ(m,n) as detailed in Section 2.4.2. These volumes are then sheared to a
reference coordinate system, the one of camera (0, 0) for instance.
The disparity layers are extracted in a front to back order by voting. Visibility
22
volumes ν(m,n) are computed from their associated occupancy volumes using (2.17)
and an aggregation volume A is obtained using
Ax,y,d =∑
(m,n)∈C
ν(m,n)x,y,d δ
(m,n)x,y,d . (2.21)
A disparity layer D is extracted by selecting the voxels with the largest aggregation
values along the disparity axis. These voxels are then removed from the occupancy
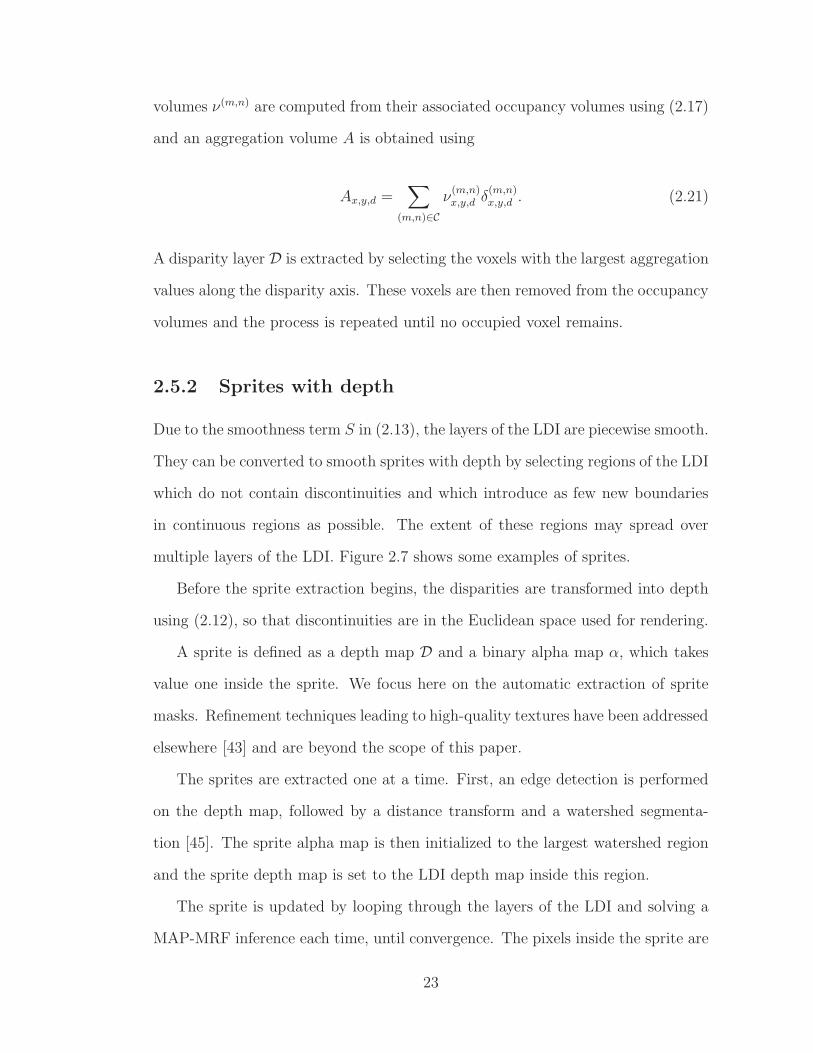
volumes and the process is repeated until no occupied voxel remains.
2.5.2 Sprites with depth
Due to the smoothness term S in (2.13), the layers of the LDI are piecewise smooth.
They can be converted to smooth sprites with depth by selecting regions of the LDI
which do not contain discontinuities and which introduce as few new boundaries
in continuous regions as possible. The extent of these regions may spread over
multiple layers of the LDI. Figure 2.7 shows some examples of sprites.
Before the sprite extraction begins, the disparities are transformed into depth
using (2.12), so that discontinuities are in the Euclidean space used for rendering.
A sprite is defined as a depth map D and a binary alpha map α, which takes
value one inside the sprite. We focus here on the automatic extraction of sprite
masks. Refinement techniques leading to high-quality textures have been addressed
elsewhere [43] and are beyond the scope of this paper.
The sprites are extracted one at a time. First, an edge detection is performed
on the depth map, followed by a distance transform and a watershed segmenta-
tion [45]. The sprite alpha map is then initialized to the largest watershed region
and the sprite depth map is set to the LDI depth map inside this region.
The sprite is updated by looping through the layers of the LDI and solving a
MAP-MRF inference each time, until convergence. The pixels inside the sprite are
23

Figure 2.7: Examples of sprites extracted from the LDI of Tsukuba with 25 cam-eras. Note the absence of occlusion on the cans.
then removed from the LDI, the newly visible pixels moved to the first layer, and
the process repeated.
The MAP-MRF inference proceeds as follows. Let D(LDI) and α(LDI) be re-
spectively the depth map and the binary alpha map of the current LDI layer. The
sprite and the LDI layer are first fused together to form D and α such that
αx,y = αx,y ∨ α(LDI)x,y ,
Dx,y = αx,yDx,y + (1− αx,y)D(LDI)x,y .
(2.22)
At each pixel (x, y), we define a likelihood px,y of belonging to the sprite and
we model its dependencies by a MRF. The likelihoods inside the sprite mask are
fixed to one and three transition functions are defined
px′,y′ =
(1− 2ρ0)px,y + ρ0 where smooth,
(1− 2ρ1)px,y + ρ1 at small depth differences,
min (1− px,y, 1/2) at discontinuities,
where ρ0 and ρ1 are two transition likelihoods with 0 ≤ ρ0 < ρ1 ≤ 1/2. The third
transition function states that at a discontinuity� if one side belongs to the sprite, the other one does not,
24

Figure 2.8: Disparity map obtained from the four rectified images of the toy se-quence shown in Figure 2.2.� if one side does not belong to the sprite, there is no constraint on the other
side.
Once the inference has been solved, the sprite alpha map is set to one where p is
greater than 1/2 and the sprite depth map is updated accordingly.
2.6 Experimental Results
First, the rectification and stereo reconstruction algorithms are validated on four
images from the toy sequence [44]. The four cameras form a 2 × 2 array with
nonparallel optical axes and nonsquare cells. Figure 2.2 shows the output of the
rectification algorithm. Rectification aligns the rows and columns of the images
and introduces a limited amount of distortion. Figure 2.8 shows the disparity map
obtained by the proposed stereo reconstruction algorithm after five iterations. The
geometry of the scene appears clearly.
The stereo reconstruction is then tested on the binocular sequences of the Mid-
dlebury dataset [25]. In this case, the configuration of the cameras is such that
rectification does not introduce any image distortion. Figure 2.9 shows the dispar-
ity maps obtained by the proposed method using fixed parameters. The proposed
25

Figure 2.9: Disparity maps obtained on the Middlebury dataset with two cameras.The occlusion model leads to sharp and accurate depth discontinuities.
method performs consistently well over the set of sequences. In particular, it does
not suffer from foreground fattening [25]: occlusion modeling, geometric consis-
tency, and piecewise smoothness lead to disparity maps with discontinuities which
are both sharp and accurately located. The disparity maps contain few errors,
mostly located on the left and right image borders, where less depth information
is available.
Since the ground truth is known for this dataset, we also present numerical
performance results in Table 2.1. The error rates of the proposed method are close
to those of the best binocular methods.
Unlike binocular methods, however, the proposed method scales with the num-
ber of cameras. Table 2.2 presents the error rates of the proposed algorithm and
26
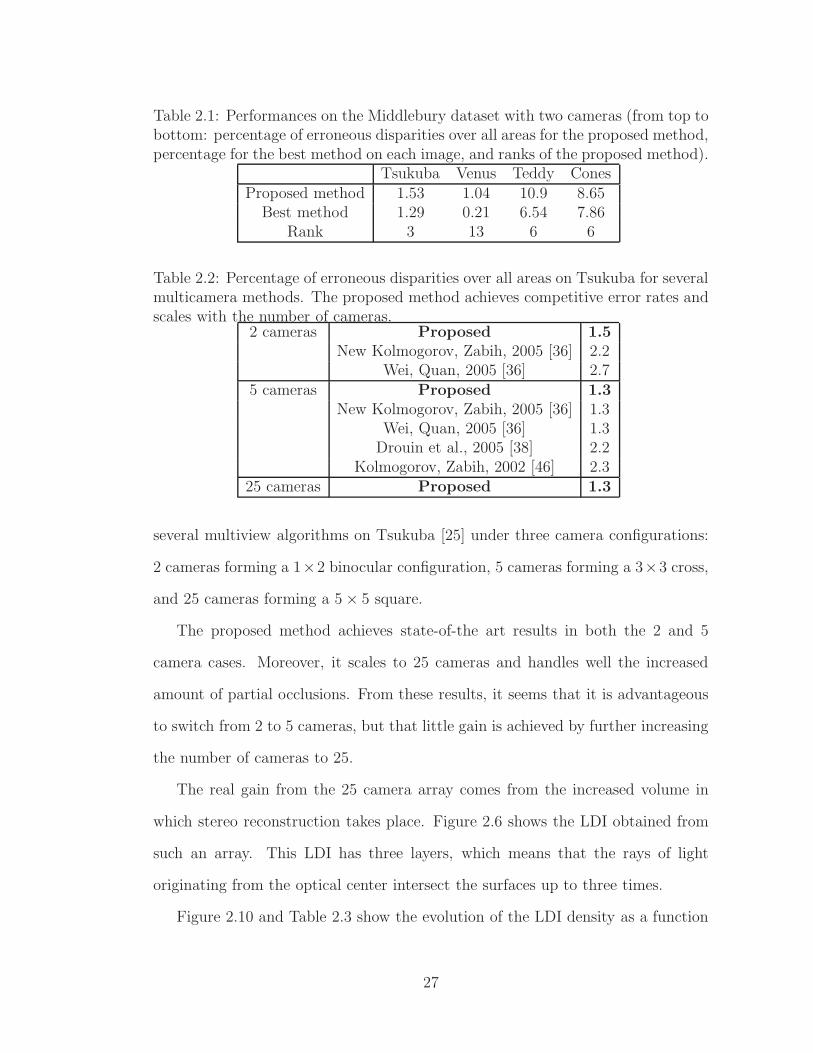
Table 2.1: Performances on the Middlebury dataset with two cameras (from top tobottom: percentage of erroneous disparities over all areas for the proposed method,percentage for the best method on each image, and ranks of the proposed method).
Tsukuba Venus Teddy ConesProposed method 1.53 1.04 10.9 8.65
Best method 1.29 0.21 6.54 7.86Rank 3 13 6 6
Table 2.2: Percentage of erroneous disparities over all areas on Tsukuba for severalmulticamera methods. The proposed method achieves competitive error rates andscales with the number of cameras.
2 cameras Proposed 1.5New Kolmogorov, Zabih, 2005 [36] 2.2
Wei, Quan, 2005 [36] 2.75 cameras Proposed 1.3
New Kolmogorov, Zabih, 2005 [36] 1.3Wei, Quan, 2005 [36] 1.3
Drouin et al., 2005 [38] 2.2Kolmogorov, Zabih, 2002 [46] 2.3
25 cameras Proposed 1.3
several multiview algorithms on Tsukuba [25] under three camera configurations:
2 cameras forming a 1×2 binocular configuration, 5 cameras forming a 3×3 cross,
and 25 cameras forming a 5× 5 square.
The proposed method achieves state-of-the art results in both the 2 and 5
camera cases. Moreover, it scales to 25 cameras and handles well the increased
amount of partial occlusions. From these results, it seems that it is advantageous
to switch from 2 to 5 cameras, but that little gain is achieved by further increasing
the number of cameras to 25.
The real gain from the 25 camera array comes from the increased volume in
which stereo reconstruction takes place. Figure 2.6 shows the LDI obtained from
such an array. This LDI has three layers, which means that the rays of light
originating from the optical center intersect the surfaces up to three times.
Figure 2.10 and Table 2.3 show the evolution of the LDI density as a function
27
(a) 2 cameras (b) 5 cameras
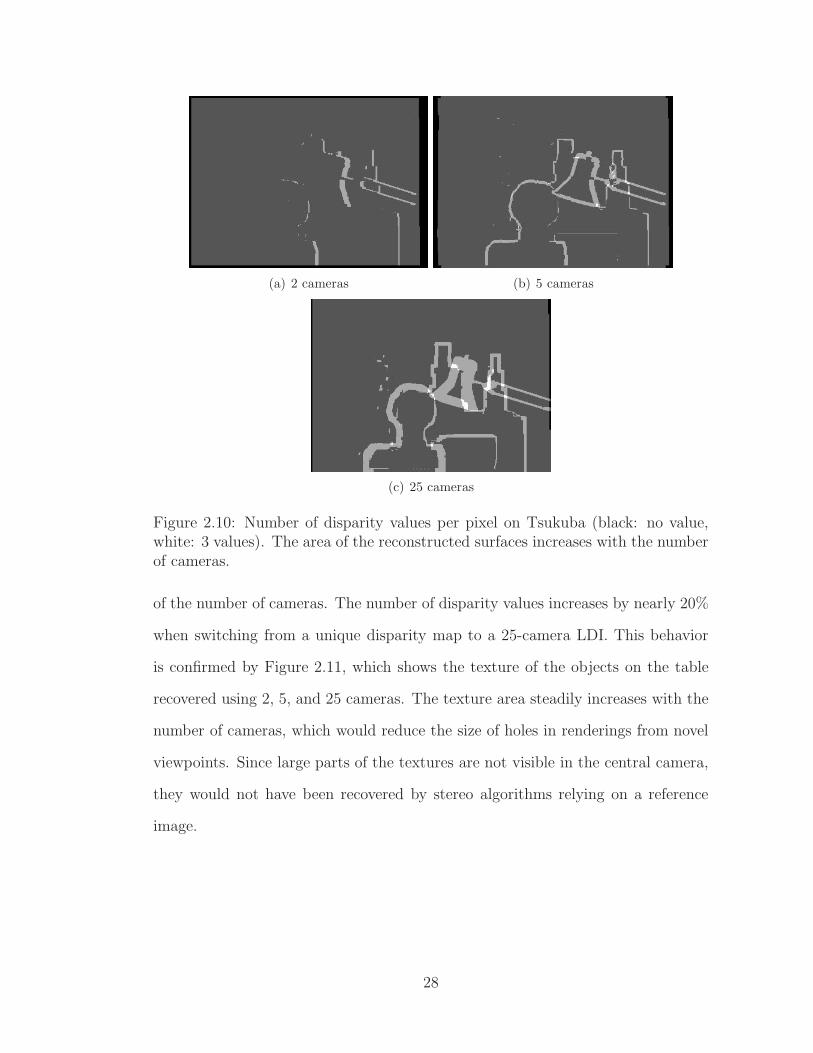
(c) 25 cameras
Figure 2.10: Number of disparity values per pixel on Tsukuba (black: no value,white: 3 values). The area of the reconstructed surfaces increases with the numberof cameras.
of the number of cameras. The number of disparity values increases by nearly 20%
when switching from a unique disparity map to a 25-camera LDI. This behavior
is confirmed by Figure 2.11, which shows the texture of the objects on the table
recovered using 2, 5, and 25 cameras. The texture area steadily increases with the
number of cameras, which would reduce the size of holes in renderings from novel
viewpoints. Since large parts of the textures are not visible in the central camera,
they would not have been recovered by stereo algorithms relying on a reference
image.
28
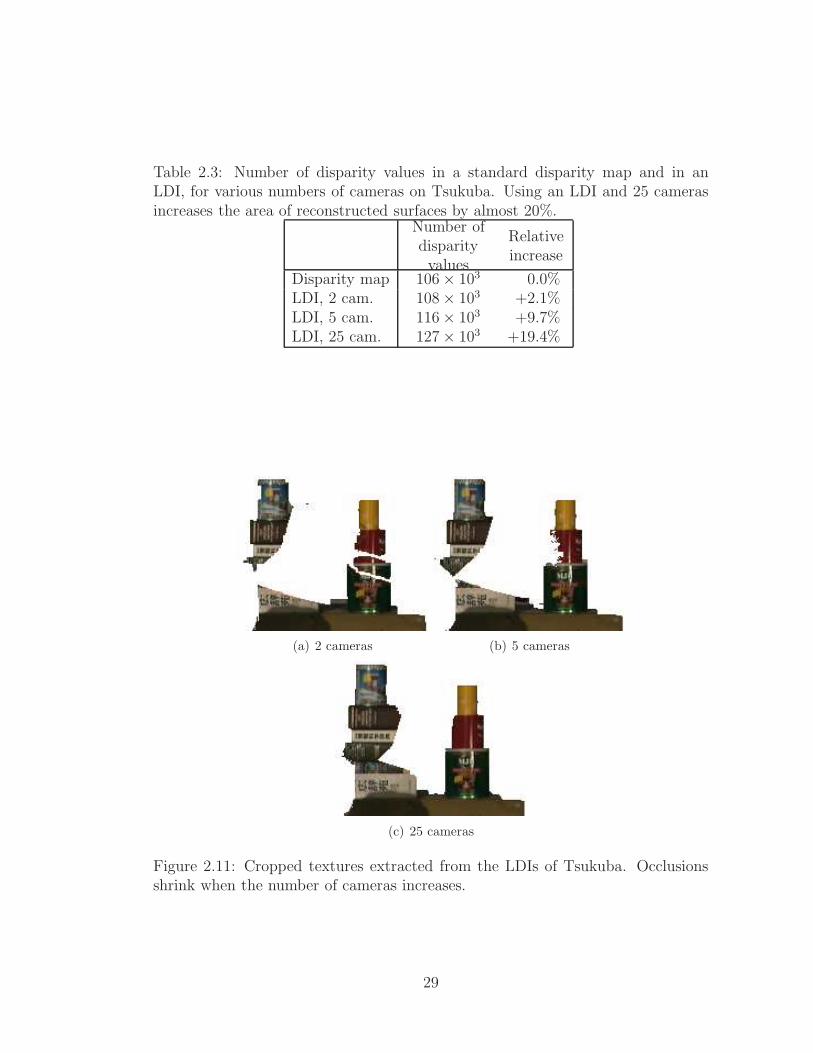
Table 2.3: Number of disparity values in a standard disparity map and in anLDI, for various numbers of cameras on Tsukuba. Using an LDI and 25 camerasincreases the area of reconstructed surfaces by almost 20%.
Number ofdisparityvalues
Relativeincrease
Disparity map 106× 103 0.0%LDI, 2 cam. 108× 103 +2.1%LDI, 5 cam. 116× 103 +9.7%LDI, 25 cam. 127× 103 +19.4%
(a) 2 cameras (b) 5 cameras
(c) 25 cameras
Figure 2.11: Cropped textures extracted from the LDIs of Tsukuba. Occlusionsshrink when the number of cameras increases.
29

2.7 Conclusion
In this chapter, we have first presented a novel rectification algorithm that han-
dles planar camera arrays of any size and greatly simplifies the reconstruction of
3D surfaces. Second, we have introduced a stereo reconstruction method that
treats all cameras symmetrically and scales with the number of cameras. Finally,
we have presented novel algorithms to merge the estimated disparity maps into
layered depth images and sprites with depth. We have validated the proposed
methods by experimental results on arrays with various camera configurations and
reconstructed dense surfaces 20% larger than classical stereo methods on Tsukuba.
Future work will consider multiple planar arrays to obtain closed surfaces.
30

CHAPTER 3
WAVELET-BASED JOINTESTIMATION ANDENCODING OF DIBR
3.1 Introduction
Free-viewpoint three-dimensional television (3D-TV) aims at providing an en-
hanced viewing experience not only by letting viewers perceive the third spatial
dimension via stereoscopy but also by allowing them to move inside the 3D video
and freely choose the viewing location they prefer [47]. The free-viewpoint ap-
proach is also useful for multiuser autostereoscopic 3D displays [48], which have to
generate a large number of viewpoints.
The fundamental problem posed by 3D-TV lies in the massive amount of data
required to represent the set of all possible views or, equivalently, the set of all light
rays in the scene. This set of light rays, called the plenoptic function [11], lies in
general in a seven-dimensional space. Each light ray travels along a line, which is
described by a point (three dimensions), an angular orientation (two dimensions),
and a time instant (one dimension). The last dimension describes the spectrum,
or color, of the light rays. By comparison, 2D videos only lie in a four-dimensional
space made of two angles, time, and color. Therefore, 3D-TV requires the design
of a novel video chain [47].
A large number of methods have been proposed to record and encode the
plenoptic function [49]. They widely differ in the amount of 3D geometry used
to encode the data, which ranges from no geometry at all (e.g., light field) to an
extremely accurate geometry (e.g., texture mapping). On the one hand, relying on
31

the geometry has the advantage of requiring fewer cameras to record the plenoptic
function and allowing the reduction of redundancies between the recorded views [9,
50]. On the other hand, using the geometry has the drawback of limiting the
realism of the synthesized views and requiring a difficult estimation of the 3D
geometry. Indeed, passive 3D geometry estimation from multiple views suffers
from ambiguities, while estimation based on active lighting has only a narrow
scope of application [47].
An efficient trade-off on the 3D geometry, called the depth-image-based rep-
resentation (DIBR), consists in approximating the plenoptic function using pairs
of images and depth maps [8]. Now part of the MPEG-4 standard [10, 51], this
representation allows arbitrary views to be rendered in the vicinity of these pairs.
Since depth maps tend to have lower entropies than images, the DIBR leads to
compact bitstreams. Moreover, realistic images can be synthesized from the DIBR
using image-based rendering (IBR) and depth maps do not need to be estimated
extremely accurately, as long as the viewpoint does not change too much.
Encoding the DIBR presents two difficulties. First, the depth maps are un-
known. Therefore, not only do they have to be encoded, but they also have to
be estimated. Second, the relation between the depth maps and the distortion of
the plenoptic function is highly nonlinear, which makes the rate-distortion (RD)
optimization difficult. In particular, finding an optimal bitrate allocation between
images and depth maps is nontrivial.
A number of methods have avoided these issues by excluding depth maps from
the RD problem. For instance, in [50, 52] depth maps are obtained using block-
based depth estimation, essentially a motion estimation, and encoded in a lossless
fashion. As an alternative to blocks, depth can also be estimated using meshes [53,
54] or pixel-wise regularization [8]. However, in such methods the image encoder
32

and the depth encoder operate at different RD slopes, which penalizes the overall
codec efficiency and makes it difficult to optimally allocate the bitrate [55].
A more principled approach consists in linearizing the RD problem [56,57] using
Taylor series expansions and statistical analysis. It has the advantage of leading to
closed-form expressions and allowing a theoretical analysis of the problem. How-
ever, linearization is only valid for small depth approximations.
Another way of handling the nonlinearity is to assume that depth maps take
a finite number of discrete values. Under some constraints on the dependencies
between depth values, globally optimal solutions can be found using dynamic pro-
gramming [58]. For instance, optimal solutions exist when depth maps are encoded
using differential pulse code modulation (DPCM) [59] or quadtrees [60]. This ap-
proach does not require any ground truth; the estimation and encoding of the depth
maps are carried out jointly. It also takes advantage of the bitrate constraint to
favor smooth depth maps, much as ad-hoc smoothness terms do in computer vi-
sion [25], which reduces the ambiguity of the estimation.
In this chapter, we propose a new wavelet-based DIBR codec which performs
an RD-optimized encoding of multiple views. It differs from classical wavelet-based
codecs in that part of the data to be transformed (i.e., the depth map) is unknown.
Here, as shown in Figure 3.1, both the depth estimation and the depth and image
encoding are performed jointly. Although the problem is nonlinear, we present a
codec able to efficiently find optimal solutions without resort to linearization. We
show that when the depth maps are represented using special integer wavelets,
their joint estimation and coding via RD-optimization can be efficiently solved us-
ing dynamic programming (DP) along the tree of wavelet coefficients. The DP we
introduce in this chapter differs from that of quadtrees [61], as discussed in Sec-
tion 3.3.4. The RD-optimization of the integer wavelets favors piecewise-smooth
depth maps, which reduces the estimation ambiguity and leads to compact repre-
33

Figure 3.1: Overview of the proposed codec: the encoder takes multiple views andjointly estimates and encodes a depth map together with a reference image (theDIBR). The output DIBR can be used to render free viewpoints.
sentations of the data. The joint encoding of the images and depth maps provides
an RD-optimized bitrate allocation. Furthermore, using the fact that depth dis-
continuities usually happen at image edges, it reduces the redundancies between
depth maps and images by coding the two wavelet significance maps only once.
In addition, the proposed codec offers scalability both in resolution, using
wavelets, and in quality, using quality layers. The former allows servers to ef-
ficiently stream data to display devices with inhomogeneous display resolutions
and inside online virtual 3D worlds, where the DIBR may actually only cover a
small portion of the display due to its distance to the viewpoint. The latter lets
servers efficiently stream data over networks with inhomogeneous capabilities. In
both cases, the RD point is chosen on the fly at the server by truncating the
bitstream [19].
There is a close relation between depth maps and 2D motion fields: depth
maps define 3D surfaces, whose projection onto image planes gives rise to motion
fields. Therefore, the techniques designed to solve the RD problem of classical 2D
video coding [62] can usually also be applied to DIBR. Among these techniques,
those described in [63, 64] are related to the proposed wavelet-based coding. In
these codecs, images are split into blocks of variable sizes using quadtrees, and the
motion vectors are DPCM coded. Like our codec, they achieve global optimality
34

using dynamic programming. However, besides being not scalable, their complexity
is exponential in the block sizes, which limits the range of block sizes they can
handle. The complexity of our proposed codec is only linear in the number of
wavelet decomposition levels, due to the special tree structure we introduce.
The remainder of the chapter is organized as follows. Section 3.2 presents
the RD problem at hand, while Section 3.3 details the optimization of the DIBR.
Finally, Section 3.4 presents our experimental results.
3.2 Problem Formulation
First, we define the RD problem that will be solved by the proposed codec. As
illustrated in Figure 3.1, the encoder takes a set of synchronized views as input and
represents them using the DIBR. The decoder receives the DIBR and synthesizes
novel views at 3D locations chosen by the viewers.
The DIBR consists in a subset of the views, called reference views, along
with unknown depth maps. In the following, we limit our study to the case of
static grayscale views. In this case, the DIBR provides an approximation to five-
dimensional plenoptic functions with three spatial dimensions and two angular
dimensions. Since the DIBR only offers a local approximation of the plenoptic
function, the viewers are free to choose arbitrary viewpoints, but only inside a
region of interest (ROI). A natural choice for the shape of the ROI is to take the
union of a set of hypervolumes made of 3D spheres in space and 2D discs in angle,
with one hypervolume associated to each pair of image and depth map. Since the
approximation does not usually degrade abruptly when the distance increases, the
decoder could actually enforce a “soft” ROI boundary by discouraging the viewer
from choosing a viewpoint outside of the ROI without forbidding it.
The distortion introduced by the codec is measured using the mean-square
35

error (MSE) between the recorded views and the views rendered from the DIBR.
Denoting the vth recorded view and its rendered counterpart respectively by the
column vectors Iv and Iv obtained by stacking all the pixels together, the distortion
can be written as
1
NmNnNv
Nv−1∑
v=0
∥
∥
∥Iv − Iv
∥
∥
∥
2
2(3.1)
where ‖.‖2 denotes the 2-norm, Nm, and Nn are respectively the number of rows and
columns in the views, and Nv is the number of views. We denote by N , NmNnNv
the total number of pixels.
The decoder renders novel views using the nearest pair of image and depth
map. This coding scheme is similar to the encoding Intra (I) and Predictive (P)
in the MPEG standard [62]: reference views are I frames while all the other views
are P frames. The total distortion is then the sum of the distortions associated
with each pair of image and depth map. Likewise, the pairs of images and depth
maps are encoded independently of one another, so that the total bitrate is also
the sum of the bitrates associated with each pair. A differential encoding could
increase the bitrate savings but would at the same time reduce the ability of the
decoder to access views randomly [49].
As a consequence, the RD problem can be solved for each pair of image and
depth map independently. Without loss of generality, the remainder of this article
only considers the case where a unique pair is encoded and the reference view is
indexed by v = 0.
The quantized depth map takes a finite number of discrete values, which define a
set of iso-depth planes, as shown in Figure 3.2. Each plane induces a special motion
field between the reference view and an arbitrary view which is a homography [14],
as shown in Figure 3.3. This class of motion fields has the property of transforming
quadrilaterals into quadrilaterals and includes affine transforms as a special case.
36

Figure 3.2: The spatial extent of a ROI (sphere) with one pair of image anddepth map, along with seven views (cones). The central dark cone designates thereference view. The planes represent iso-depth surfaces (3D model reproducedwith permission from Google 3D Warehouse).
In the particular case of rectified views [14], the motion vectors are parallel to the
baseline of the pair of views.
In this framework, the depth estimation is formulated in terms of disparities,
which are inversely proportional to depths. Disparities are better suited to the
geometry of the problem at hand. They take into account the decreasing accuracy
of the depth estimation as depth increases and they are equal to motion vectors in
the case of rectified views.
Both the reference view and the disparity map are encoded in a lossy manner.
Let us denote the encoded reference view by the vector I0 and the jointly estimated
and encoded disparity map by the vector δ. The view Iv is approximated by forward
motion compensation of the reference view I0 using the estimated disparity map δ,
an operation denoted by Mfv (I0; δ) where the f stands for ‘forward.’
The forward motion compensation is performed using an accumulation buffer
and multiple texture-mapping operations, which benefit from hardware accelera-
tion [65]. The accumulation buffer consists in a memory buffer which is initially
empty and progressively filled by the intensity values of texture-mapped views.
37

(a) A reference view s = 0 along with an arbitrary view s = 1 and an iso-depth plane.
(b) The two views and the associated motion fields.
Figure 3.3: The projection of an iso-depth plane onto two views gives rise to amotion field between the two which is a 2D homography.
38
For each disparity value d, the following three steps are taken:� A binary mask m(δ, d) is defined, which takes value one at pixels with dis-
parity value d.� The homography associated with the disparity value d is applied to both the
reference view I0 and the mask m(δ, d) using texture mapping.� The values of the pixels in the accumulation buffer for which the motion-
compensated mask is one are replaced by those in the motion-compensated
view.
In order to enforce occlusion relations between the iso-depth planes, the dispar-
ities are processed in decreasing depth order. The issues of resampling and hole
filling are solved using bilinear interpolation and texture propagation by Poisson
equation [66].
We shall encode both the image I0 and the disparity map δ in the wavelet
domain. Let c and d be the column vectors of their wavelet coefficients, respectively.
The wavelet synthesis operators relate these vectors by
I0 , Tc and δ , T (d), (3.2)
where the matrix T represents the linear wavelet transform for the image and
the function T represents the integer-to-integer wavelet transform for the discrete-
valued disparity map.
We define two significance maps, σ(c) and σ(d), which are binary vectors with
value one in the presence of nonnull wavelet coefficients and zero otherwise. These
maps are not directional, i.e., they are the same for all directional subbands at
each scale of the 2D wavelet transform. In this way, we will be able to compare
39

σ(c) and σ(d) even when the wavelet operators T and T differ in their directional
division of the frequency plane.
In natural images, discontinuities in the disparity map are usually associated
with discontinuities in the image. When they are not, it is very difficult to estimate
the disparity discontinuities from multiple views. Therefore, we can reduce the data
redundancy of the DIBR by coding the image and the disparity significance maps
jointly. This is done by coding only the significance map of the image σ(c) and
assuming the significant coefficients in σ(d) to be a subset of those in σ(c), that is,
σ(c) = 0⇒ σ(d) = 0. (3.3)
This joint encoding also reduces the complexity of the search for the optimal vector
d∗ by fixing a large number of its coefficients to zero.
The total rate R(c, d) is then given by the sum of the rates R(c) and R(d|σ(c))
and the RD problem is
minc,d
1
N
Nv−1∑
v=0
∥
∥Iv −Mfv(Tc; T (d))
∥
∥
2
2
such that R(c) + R(d|σ(c)) ≤ Rmax
(3.4)
where Rmax is the maximum rate allowed. The constraint σ(c) = 0 ⇒ σ(d) = 0
appears implicitly in the rate constraint: R(d|σ(c)) takes the value +∞ when this
constraint is violated. Introducing the Lagrange multiplier λ [67], (3.4) can be
written as
minc,d
1
N
Nv−1∑
v=0
∥
∥Iv −Mfv(Tc; T (d))
∥
∥
2
2+ λ (R(c) + R(d|σ(c))) . (3.5)
This equation has three goals. First, it encodes the reference view. Second, it
estimates the disparity map, and therefore allows the rendering of arbitrary views.
40

Finally, it encodes this disparity map. Solving this optimization will be the topic
of the next section.
3.3 Rate-Distortion Optimization
3.3.1 Overview
Since (3.5) is nonlinear, solving it is not a trivial operation. Therefore, we formulate
several approximations to obtain a computationally efficient method.
First, we ignore the issues of occlusions and resampling. In this way, the motion-
compensation operation becomes invertible and the optimization problem can be
defined either on the rendered views or on the reference view. The latter option
turns out to be much more practical because it decouples the encoded reference
view from the motion compensation. Mathematically, this assumption is equivalent
to∥
∥
∥Iv −Mf
v (I0; δ)∥
∥
∥
2
2≈∥
∥
∥Mb
v(Iv; δ)− I0
∥
∥
∥
2
2(3.6)
where Mbv(Iv; δ) denotes the backward-motion-compensated view Iv. Equation
(3.5) then becomes
minc,d
1
N
Nv−1∑
v=0
∥
∥Mbv(Iv; T (d))−Tc
∥
∥
2
2+ λ (R(c) + R(d|c)) . (3.7)
The MSE term in (3.7) depends on the wavelet vectors c and d in very different
ways: it is quadratic in c but not in d. Therefore, the minimization is solved
using coordinate descent [68], first minimizing c and then d. The minimization of
c ignores the dependency with d due to the shared significance map. This shall
allow us to use classical wavelet coding techniques for c and dynamic programming
for d.
41

The optimization is initialized at high bitrate where the MSE is virtually null,
that is,
Tc ≈ I0 andMbv(Iv; T (d)) ≈ I0. (3.8)
In general, we would need to iterate the successive optimization process until con-
vergence. Here, however, only one iteration is run to reduce the computational
complexity and prevent erroneous disparities from introducing blur in the encoded
reference view I0.
In the remainder of this section, we first describe the optimization of the refer-
ence view in Section 3.3.2. We then detail the optimization of the disparity map,
beginning with the simpler case of one-dimensional views in Section 3.3.3, which
we extend to two-dimensional views in Section 3.3.5. Finally, we present how a
quality scalable bitstream can be obtained in Section 3.3.7.
3.3.2 Reference view
We start with the optimization of the wavelet coefficients c of the reference view.
Fixing d and using the high-bitrate assumption (3.8), the optimization problem
(3.7) becomes
minc
1
NmNn‖I0 −Tc‖22 + λR(c). (3.9)
When the wavelet transform T is nearly orthonormal, like the 9/7 wavelet [18] for
instance, this equation can be further simplified to
minc
1
NmNn
∥
∥T−1I0 − c∥
∥
2
2+ λR(c), (3.10)
which is a standard problem in image compression and is readily solved by wavelet-
based coders [19].
42

3.3.3 One-dimensional disparity map
The next step is to find an optimal solution for the wavelet coefficients d of the
disparity map. To begin with, we consider the special case of one-dimensional
views (Nr = 1).
Fixing c, the optimization problem (3.7) becomes
mind
1
N
Nv−1∑
v=0
Nn−1∑
n=0
(
Mbv,n(Iv; δn)− I0,n
)2
+ λR(d|σ(c)), (3.11)
where I0 , Tc andMbv,n(Iv; d) denotes the intensity value of the pixel in Iv which
would correspond to the pixel n in the reference view if the pixel n had the disparity
value d. Unlike in the previous section, the MSE term is not a quadratic function of
the wavelet coefficients, due to the nonlinearity of motion compensation. Instead,
we take advantage of the fact that the disparity map only takes a finite number of
values.
The MSE term can be written in terms of an error matrix E in which the entry
Ed,n gives the scaled square error with which the pixel n of I0 would be associated
if it had disparity d (see Figure 3.4). That is,
Ed,n ,1
N
Nv−1∑
v=0
(
Mbv,n(Iv; r)− I0,n
)2
. (3.12)
This error matrix is also called “disparity space image” [25] and is independent of
the disparity map δ. Computing this matrix has a complexity of O(NNd), where
Nd is the number of disparity values.
We study the encoding of the disparity map using two transforms, namely the
Sequential (S) transform [19] and a transform we call the Laplace (L) transform
due to its resemblance to the Laplacian pyramid [69]. Both provide a compact
representation of discrete and piecewise-constant disparity maps. Both also in-
43

� - abscissa
�-disparity
�
����
� ����
Figure 3.4: An error matrix E from the Tsukuba image set with two optimal pathsoverlaid, λ = 0 (dashed) and λ =∞ (solid). Lighter shades of gray indicate largersquared intensity differences.
Table 3.1: Analysis and synthesis operators of the Laplace (L) and Sequential (S)transforms (see text for details).
L-transformanalysis synthesis
l(j)n =
⌊
l(j−1)2n +l
(j−1)2n+1
2
⌋
h(j−1)2n = l
(j−1)2n − l
(j)n
h(j−1)2n+1 = l
(j−1)2n+1 − l
(j)n
(3.13)l(j−1)2n = l
(j)n + h
(j−1)2n
l(j−1)2n+1 = l
(j)n + h
(j−1)2n+1
(3.14)
S-transformanalysis synthesis
l(j)n =
⌊
l(j−1)2n +l
(j−1)2n+1
2
⌋
h(j)n = l
(j−1)2n − l
(j−1)2n+1
(3.15)l(j−1)2n
S0= l(j)n −
⌊
h(j)n
2
⌋
+ h(j)n
l(j−1)2n+1
S1= l(j)n −
⌊
h(j)n
2
⌋ (3.16)
duce graphs of dependencies between their wavelet coefficients as trees, so that the
problem can be efficiently solved using dynamic programming [70]. They differ in
their redundancy, the former being nonredundant. They also differ in the com-
plexity of their optimization with regard to the number of disparity values Nd, the
latter being of linear complexity and the former of quadratic complexity.
The analysis and synthesis operators of these two transforms are given in Ta-
ble 3.1, where ⌊x⌋ denotes the largest integer less than or equal to x. They relate
the low-pass coefficients l and the high-pass coefficients h between the level j − 1
with finer resolution and the level j with coarser resolution.
44

The wavelet vector d is made of all the high-pass coefficients h, along with the
low-pass coefficients l of the coarsest level j , L − 1. The low-pass coefficients l
at the finest level j , 0 are equal to the disparities δ, that is, l(0)n = δn.
The probability of the wavelet coefficients is approximated as follows. The co-
efficients l at the coarsest level and the coefficients h are assumed to be jointly
independent. The coefficients l follow a uniform distribution. The coefficients h
are null with probability one if the corresponding image coefficients are insignifi-
cant and otherwise follow a discrete and truncated Laplace distribution with zero
mean [19], that is,
p(h(j)n |σ(j)
n (c)) =
1h(j)n =0
if σ(j)n (c) = 0,
1Ze−
|h(j)n |b 1
|h(j)n |≤Nd
otherwise
(3.17)
where b is a parameter to be estimated and Z is a normalizing constant. This
probability distribution defines the entropy of the data [17], which we use as an
approximation of the actual bitrate. The bitrate, in bits per pixel, is therefore
R(d|σ(c)) = −L−1∑
j=0
Nh(j)−1∑
n=0
log2
(
p(h(j)n |σ(j)
n (c)))
+ cst (3.18)
where log2 denotes the logarithm to base 2, cst is a constant term independent of
d, and Nh(j) is the number of high-pass coefficients at level j. We introduce the
cost function
C(h(j)n ) ,
+∞ if σ(j)n (c) = 0 and h
(j)n 6= 0,
µ|h(j)n | otherwise
(3.19)
where µ , λ/(b log 2) acts as a smoothness factor. Using this cost function, the
45

equation of the bitrate (3.18) becomes
R(d|σ(c)) =1
λ
L−1∑
j=0
Nh(j)−1∑
n=0
C(h(j)n ) + cst (3.20)
and the optimization problem (3.11) can be written as
mind
Nn−1∑
n=0
El(0)n ,n
+
L−1∑
j=0
Nh(j)−1∑
n=0
C(h(j)n ). (3.21)
3.3.4 Dynamic programming
The optimization problem (3.21) is still a minimization over a space with large
dimension. However, it can be solved recursively by a series of minimizations over
small search spaces. The approach consists in using the commutativity of the sum
and min operators to group the terms of the summation together based on the
variables they depend on. This is possible due to the choice of wavelets, which do
not introduce loops in the dependency graph of the group of terms, as shown in
Figures 3.5 and 3.6. In these figures, the notation E:,n denotes the column n of the
error matrix E. This column vector contains the errors of the different disparity
values at the pixel location n.
Example 1 Let us consider a simple example to illustrate the algorithm. The
optimization problem associated with a two-level L transform, emphasized by a
dashed box in Figure 3.5, is given by
minl(1)0 ,h
(0)0 ,h
(1)1
(
El(1)0 +h
(0)0 ,0
+ El(1)0 +h
(0)1 ,1
+C(h(0)0 ) + C(h
(0)1 ))
.
(3.22)
By grouping the terms of the summation together and commuting the min and sum
46

E:,0 E:,1 E:,2 E:,3
l(0)0 l
(0)1 l
(0)2 l
(0)3
C(h(0)0 ) C(h
(0)1 ) C(h
(0)2 ) C(h
(0)3 )
l(1)0
h(0)0 h
(0)1
l(1)1
h(0)2 h
(0)3
C(h(1)0 ) C(h
(1)1 )
l(2)0
h(1)0 h
(1)1
Figure 3.5: Dependency graph of a three-level L transform. The coefficients inbold are those included in the wavelet vector d. Gray nodes represent the MSEand rate terms of the RD optimization. The dashed box highlights the two-levelL transform associated with (3.22).
E:,0 E:,1 E:,2 E:,3
l(0)0 l
(0)1 l
(0)2 l
(0)3
C(h(1)0 ) C(h
(1)1 )
l(1)0
h(1)0
l(1)1
h(1)1
C(h(2)0 )
l(2)0
h(2)0
Figure 3.6: Dependency graph of a three-level S transform. The coefficients inbold are those included in the wavelet vector d. Gray nodes represent the MSEand rate terms of the RD optimization.
47

operators, it can be rewritten as
minl(1)0
(
minh(0)0
(
El(1)0 +h
(0)0 ,0
+ C(h(0)0 ))
+minh(0)1
(
El(1)0 +h
(0)1 ,0
+ C(h(0)1 ))
)
(3.23)
which reduces the complexity from cubic to quadratic.
Next, we illustrate how to solve the inner minimizations. Let us consider the
minimization over h(0)0 with a smoothness factor µ = 0.5. We assume that the
disparity values range from 0 to 5 and solve for the case l(1)0 = 2. Let us assume
that the first column vector of the error matrix E is
l(0)0 0 1 2 3 4 5
ET
:,0 2 5 3 0.25 4 2(3.24)
Stacking the values of the cost function C(h(0)0 ) for each h
(0)0 (note that h
(0)0 =
l(0)0 − l
(1)0 = l
(0)0 − 2) into a cost vector C using (3.19) gives
l(0)0 0 1 2 3 4 5
h(0)0 −2 −1 0 1 2 3
CT 1 0.5 0 0.5 1 1.5
(3.25)
The sum of these two vectors is
l(0)0 0 1 2 3 4 5
ET
:,0 + CT 3 5.5 3 0.75 5 3.5(3.26)
The minimum is therefore 0.75, which is reached at l(0)0 = 3. By the definition
of the synthesis operator (3.14), it follows that the optimal high-pass coefficient
associated with l(1)0 = 2 is h
(0)0 = 1.
48

In the general case, the recursive minimization is defined using a pyramid of
error matrices {E(j), j ∈ [0, . . . , L− 1]}. The error matrix at the finest level j = 0
is defined by
E(0) , E. (3.27)
The error matrices of the L transform at coarser levels are given by
E(j)d,n = min
h(j−1)2n
(
E(j−1)
d+h(j−1)2n ,2n
+ C(h(j−1)2n )
)
+ minh(j−1)2n+1
(
E(j−1)
d+h(j−1)2n+1 ,2n+1
+ C(h(j−1)2n+1 )
)
.
(3.28)
The error matrices of the S transform at coarser levels are given by
E(j)d,n = min
h(j)n
(
E(j−1)
S0(d,h(j)n ),2n
+ E(j−1)
S1(d,h(j)n ),2n
+ C(h(j)n ))
(3.29)
where S0(.) and S1(.) denote the synthesis operators defined by (3.16).
Computing an error matrix E(j) of the S transform has a complexity quadratic
in the number of disparity values Nd: error values need to be computed for each
disparity value d and each value of the high-pass coefficient h(j)n . On the other
hand, an error matrix E(j) of the L transform can be computed with only linear
complexity, as was shown in [71] in the case of Markov random fields with linear
smoothness function.
The optimization problem (3.21) becomes simply
minl(L−1)n
E(L−1)
l(L−1)n ,n
(3.30)
for each low-pass coefficient l(L−1)n at the coarsest level L− 1.
The pyramid of error matrices is associated with a pyramid of matrices of
high-pass coefficients {H(j), j ∈ [0, . . . , L− 1]}. At each level, they store the high-
49

pass coefficients which achieve the minima in (3.28) or (3.29). Once the optimal
low-pass coefficients l(L−1)∗n are known, the low-pass and high-pass coefficients at
other levels are obtained by backtracking using the matrices H(j) and the synthesis
operators (3.16) or (3.14).
Therefore, the overall algorithm to solve (3.21) is the following:
1. The initialization creates the error matrix E(0).
2. The bottom-up pass computes the matrices E(j) and H(j).
3. The coarsest-level minimization finds the optimal low-pass coefficients l(L−1)∗n .
4. The top-down pass backtracks to compute the optimal low-pass and high-pass
coefficients l(j)∗n and h
(j)∗n at all levels.
At the end, both the globally optimal disparity map δ∗ and the globally optimal
wavelet vector d∗ are known. The initialization has a complexity of O(NNd), the
bottom-up pass of O(NnN2d ) in the case of the S transform and O(NnNd) in the case
of the L transform, the coarsest-level minimization of O(NnNd) and the top-down
pass of O(Nn).
This algorithm shares similarities with quadtree-based motion estimation [61].
In quadtree estimation, small minimizations are solved at each node of the tree to
find optimal motion vectors and decide whether to split or merge. In the proposed
algorithm, small minimizations are also solved at each node, but they find optimal
wavelet coefficients instead. A major difference between quadtrees and wavelets lies
in the way the data is stored in the tree. Quadtrees store the data at their leaves
using independent coefficients, while wavelets spread the data over the entire tree
using differential coefficients. Therefore, wavelets offer resolution scalability while
quadtrees do not. Another difference lies in the induced smoothness. Quadtrees
enforce constant values inside blocks but no smoothness between blocks, while
50

wavelets induce a smoothness between all pixels. Our experimental results shall
show that the latter reduces spurious noise in the estimated disparity maps.
3.3.5 Two-dimensional disparity map
We now extend the optimization procedure to two-dimensional views. The error
matrix E(0)d,n becomes an error tensor E
(0)d,m,n with three dimensions: rows m, columns
n, and disparities d. It is defined as
E(0)d,m,n ,
1
N
Nv−1∑
v=0
(
Mbv,m,n(Iv; d)− I0,m,n
)2
. (3.31)
Its computation has a complexity of O(NNd), which remains linear in all the
variables.
The two-dimensional extension of the L transform is also straightforward. Its
synthesis operator (3.14) simply becomes
l(j−1)2m,2n = l(j)m,n + h
(j−1)2m,2n
l(j−1)2m+1,2n = l(j)m,n + h
(j−1)2m+1,2n
l(j−1)2m+1,2n+1 = l(j)m,n + h
(j−1)2m+1,2n+1
l(j−1)2m,2n+1 = l(j)m,n + h
(j−1)2m,2n+1
. (3.32)
The computational complexity at each node of the dependency tree remains O(Nd),
with a total complexity of O(NmNnNd) for the bottom-up pass.
The two-dimensional extension of the S transform is slightly more complex.
We follow the classical approach of applying the one-dimensional wavelet trans-
form twice at each scale [18], once horizontally and once vertically. However,
we depart from the usual four-band division of the frequency plane (high-high,
high-low, low-high, low-low) shown in Figure 3.7(a). If we followed this division,
51

���������
���������������������
���
���
������
���
����������
���
�
�
��
�� ��
��������������
��������������
��������������������� ���������������������
����� �������
������� ���������
��� ���
��� ���
(a) Four-band division
��������������
�������������
�
�
��������������
��������������
��������������������� ���������������������
����� �������
������� ���������
��
�
�����������������
�����������������
��������������������
��������������������
����
����
������
������
���
���
(b) Three-band division
Figure 3.7: Two divisions of the frequency plane and the associated graphs ofdependencies between the coefficients of the S transform.
the minimizations at each node of the dependency tree (3.29) would depend on
four variables: ll(j)m,n, hl
(j)m,n, lh
(j)m,n, and hh
(j)m,n. Therefore, the complexity of each
minimization would grow from O(N2d ) to O(N4
d ), which is only feasible when few
disparity values are allowed.
Instead we propose to divide the frequency plane into only three bands at each
scale, as shown in Figure 3.7(b). The first transform is applied vertically, leading to
two bands (low, high). The second transform is applied horizontally, but only onto
the previous low band. This way the complexity at each node of the dependency
52

tree remains O(N2d ), with a total complexity of O(NmNnN2
d ) for the bottom-up
pass.
3.3.6 Bitrate optimization
The parameter b of the Laplace distribution is estimated using bracketing and a
search akin to bisection [55, 66]. A large bracket is initially chosen, whose size is
iteratively reduced. At the ith iteration, the optimal coefficients {l, h} are found
and the actual parameter b(i) is estimated by minimizing the Kullback-Leibler
divergence [17] between the histogram of the coefficients {h} and the Laplace
distribution (3.17). The current Lagrange multiplier λ(i) is obtained using the
equation
λ(i) = µ(i)b(i) log 2 (3.33)
and the parameter µ is updated by
µ(i+1) =λ
λ(i)µ(i) (3.34)
where λ is the target RD slope used to encode the reference view. This update
equation has the advantage of being independent of the bracket size, derivative-
free, and exact when λ is a linear function of µ. The iterations end when the
relative error |λ− λ(i)|/λ becomes small enough.
The final bitstream of the disparity map is generated by fixed-length coding
of the low-pass coefficients in d, fixed-length coding of the sign of the high-pass
coefficients, and arithmetic coding [17] of their absolute values. Only the high-pass
coefficients for which σ(c) is one are encoded.
53

3.3.7 Quality scalability
The wavelet-based encoding of the reference views allows both resolution and qual-
ity scalabilities [19]. As is, the proposed wavelet-based encoding of the disparity
map only allows resolution scalability. Quality scalability is achieved by introduc-
ing quality layers [19].
The qth quality layer is associated with a vector of wavelet coefficients d(q),
which is encoded using differential pulse code modulation (DPCM) between quality
layers. The optimization problem then becomes
min{d(q)}
Nq∑
q=1
(
1
N
Nv−1∑
v=0
∥
∥
∥Mb
v(Iv; T (d(q)))− I(q)0
∥
∥
∥
2
2
+ λ(q)R(d(q) − d(q−1)|c(q), d(q−1))
)(3.35)
where Nq is the number of quality layers, I(q)0 is the quantized reference view from
the qth quality layer, and λ(q) is the associated Lagrange multiplier. The vector d(0)
is chosen to be the null vector. The differential vectors d(q)−d(q−1) are assumed to
be jointly independent and to follow a discrete and truncated Laplace distribution
parameterized by b(q).
The optimization problem is solved sequentially for each d(q). The minimization
for the qth quality layer is given by
mind(q)
1
N
Nv−1∑
v=0
∥
∥
∥Mb
v(Iv; T (d(q)))− I(q)0
∥
∥
∥
2
2
+ λ(q)R(d(q) − d(q−1)|c(q), d(q−1))
(3.36)
which is similar to the minimizations described in the previous sections and can
be solved in the same way.
54

3.4 Experimental Results
We present experimental results on two image sets, Tsukuba and Teddy [25], dis-
played in Figure 3.8. The Tsukuba set has a fairly limited range of disparities,
with only 15 disparity values. On the other hand, the Teddy set has a much larger
range, with 60 disparity values. As a consequence, the Teddy set contains much
larger areas of occlusions and disocclusions.
Experiments have been run in the grayscale domain with intensity values in the
range [0, 1]. A border of two pixels has been removed around the images of Tsukuba
to compensate for camera artifacts. The experiments have been conducted using
nine views with the central view as reference for the Tsukuba set, and two views
with the left view as reference for the Teddy set. In the following, the bitrate
is defined in bits per reference-view pixels, which does not depend on the total
number of views in the optimization.
In order to benchmark the performances of the proposed RD-optimized wavelet
codecs, they are compared against two other classical codecs, one based on block
matching [50, 52] and the other on quadtrees [61, 72]. These two codecs usually
handle 2D motion vectors instead of 1D disparities. To obtain a fair comparison,
they are adapted to perform one-dimensional optimizations. The encoding is per-
formed in closed loop to obtain the least possible distortion at the decoder. The
block-based encoder simply minimizes the MSE of 8× 8 blocks and generates the
bitstream using fixed-length codes. The quadtree-based encoder performs a full
RD-optimization, as detailed in [61].
All codecs rely on the QccPack implementation of SPIHT [73] to encode the
reference view. Therefore, the wavelets, quadtrees, and blocks are all optimized
using the same error tensors E. The codecs based on quadtrees and wavelets
55

(a) Tsukuba image set
(b) Teddy image set
Figure 3.8: The two sets of images used in the experiments (from [25]).
56

(a) Level 0 (b) Level 2
(c) Level 4 (d) Level 6
Figure 3.9: Disparity map of the Teddy set at four resolution levels, showing theresolution scalability of the wavelet-based representation.
allocate automatically the birate of disparity maps. Therefore, the codecs are
compared at RD points with equal RD slopes, but possibly different total bitrates.
Figure 3.9 illustrates the resolution scalability of the proposed wavelet-based
representations. Unlike quadtrees which store the disparity information only at
their leaves, wavelets store this information over the entire tree, which allows par-
tial decoding of the tree at multiple resolutions. In the experiments, the wavelet
decomposition is performed completely, that is, until the low-pass band is reduced
to a unique pixel. Experiments have shown that stopping the decomposition earlier,
as is usually done in image coding, does not allow enough information aggregation
in large textureless regions and leads to erroneous disparity estimations.
57
Figures 3.10 and 3.11 show the DIBR encoded at three RD slopes – approx-
imately 1 × 10−2, 2 × 10−3, and 4 × 10−4 – which correspond to reference views
encoded at bitrates of 0.1 bpp, 0.5 bpp, and 1.0 bpp.
The block-based encoder appears extremely sensitive to the lack of image tex-
ture. At low bitrates, the disparity map becomes extremely noisy and is a poor
estimation of the ground truth. The noise is much reduced at higher bitrates, but
remains significant in some areas, like the upper-right corner of Tsukuba or the
roof of the house in Teddy. This seriously hinders the synthesis of novel viewpoints.
The quadtree-based encoder proves to be much more reliable. Using the RD-
optimization, it is able to gracefully decrease the quality of the disparity map when
the bitrate is reduced. Not only do the disparity maps become coarser, but they
also tend to have less spurious noise because such noise has a high bitrate cost.
The wavelet-based encoders, using both the S transform and the L transform,
demonstrate a similar behavior. Compared to the quadtree-based encoder, they
tend to generate disparity maps with less spurious noise. In quadtrees, the rate
constraint favors larger blocks. However, the disparity values between blocks are
independent. In wavelets, on the other hand, the rate constraint favors small
wavelet coefficients, which creates dependencies between blocks and enforces inter
block smoothness. The superiority of wavelets over quadtrees is especially notice-
able in the case of larger disparity ranges, which makes them more effective at
estimating and encoding the complex geometry of realistic 3D scenes.
All of these encoders have issues in areas of occlusions and disocclusions, as
can be seen for instance around the chimney of the Teddy set. This creates large
disparity errors which are detrimental for novel-view synthesis. This issue is con-
firmed by Figure 3.12. It shows two views synthesized from the DIBR encoded
at the RD slope 2× 10−3, along with the differences between the synthesized and
actual views. The dominant noise is due to occlusions and disocclusions. It has
58

���������������� �
������ ������������������ �����
������ ������������������ �����
������ ���������������������
������ ����������������� �
Figure 3.10: The DIBR of the Teddy set at three RD slopes corresponding toreference-view bitrates of 0.1 bpp, 0.5 bpp, and 1.0 bpp (from left to right). The Sand L transforms generate disparity maps that degrade gracefully with the bitrateand contain less spurious noise than quadtrees or blocks.
59

���������������� �
������ ������������������ �����
������ ������������������ �����
������ ���������������������
������ ����������������� �
Figure 3.11: The DIBR of the Tsukuba set at three RD slopes corresponding toreference-view bitrates of 0.1 bpp, 0.5 bpp, and 1.0 bpp (from left to right). The Sand L transforms generate disparity maps that degrade gracefully with the bitrateand contain less spurious noise than quadtrees or blocks.
60

(a) Tsukuba
(b) Teddy
Figure 3.12: Views synthesized from the DIBR with a reference view encoded at0.5 bpp and differences with the original views. At low quantization noise, theerrors are mostly due to occlusions and disocclusions.
two sources. First, in these areas there are no correspondences between images,
which leads to erroneous disparity estimations. Second, the hole-filling process is
efficient when disocclusions are small, but has difficulty handling large occlusions
like the one on the right of the Teddy set.
We confirm this qualitative analysis by a quantitative one. Figure 3.13 shows
the RD performances of all the codecs. The block-based codec is the least effi-
cient. Without some kind of regularization this method is not suitable for novel
view synthesis, which underlines the interest of jointly estimating and encoding
the disparity map. In Tsukuba, where the disparity range is small, quadtrees out-
perform the L transform by 0.09 dB and the S transform by 0.12 dB. On the other
61
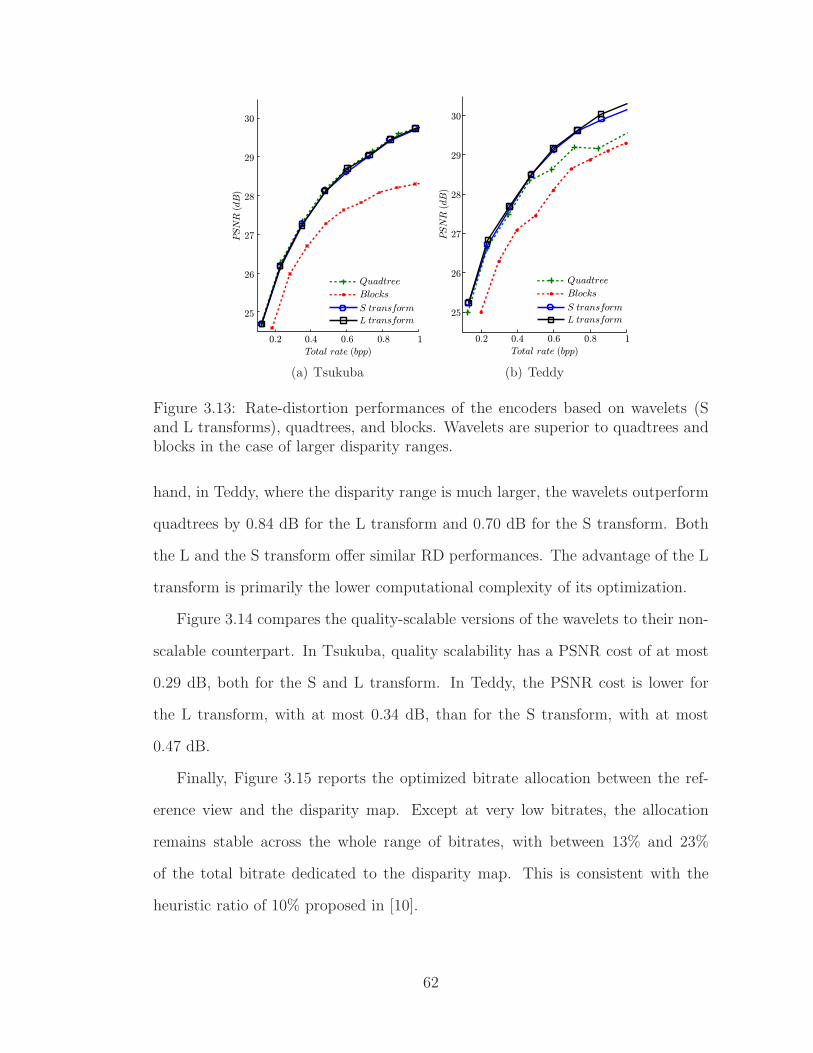
��������
������
������������
�� ����������
��� ��� ��� ��� �
������ ����� �
��
��
�
��
�
��
�� � ���
(a) Tsukuba
��� ��� ��� ��� �
��
��
�
��
�
��
������ ����� �
�� � ���
��������
������
������������
�� ����������
(b) Teddy
Figure 3.13: Rate-distortion performances of the encoders based on wavelets (Sand L transforms), quadtrees, and blocks. Wavelets are superior to quadtrees andblocks in the case of larger disparity ranges.
hand, in Teddy, where the disparity range is much larger, the wavelets outperform
quadtrees by 0.84 dB for the L transform and 0.70 dB for the S transform. Both
the L and the S transform offer similar RD performances. The advantage of the L
transform is primarily the lower computational complexity of its optimization.
Figure 3.14 compares the quality-scalable versions of the wavelets to their non-
scalable counterpart. In Tsukuba, quality scalability has a PSNR cost of at most
0.29 dB, both for the S and L transform. In Teddy, the PSNR cost is lower for
the L transform, with at most 0.34 dB, than for the S transform, with at most
0.47 dB.
Finally, Figure 3.15 reports the optimized bitrate allocation between the ref-
erence view and the disparity map. Except at very low bitrates, the allocation
remains stable across the whole range of bitrates, with between 13% and 23%
of the total bitrate dedicated to the disparity map. This is consistent with the
heuristic ratio of 10% proposed in [10].
62
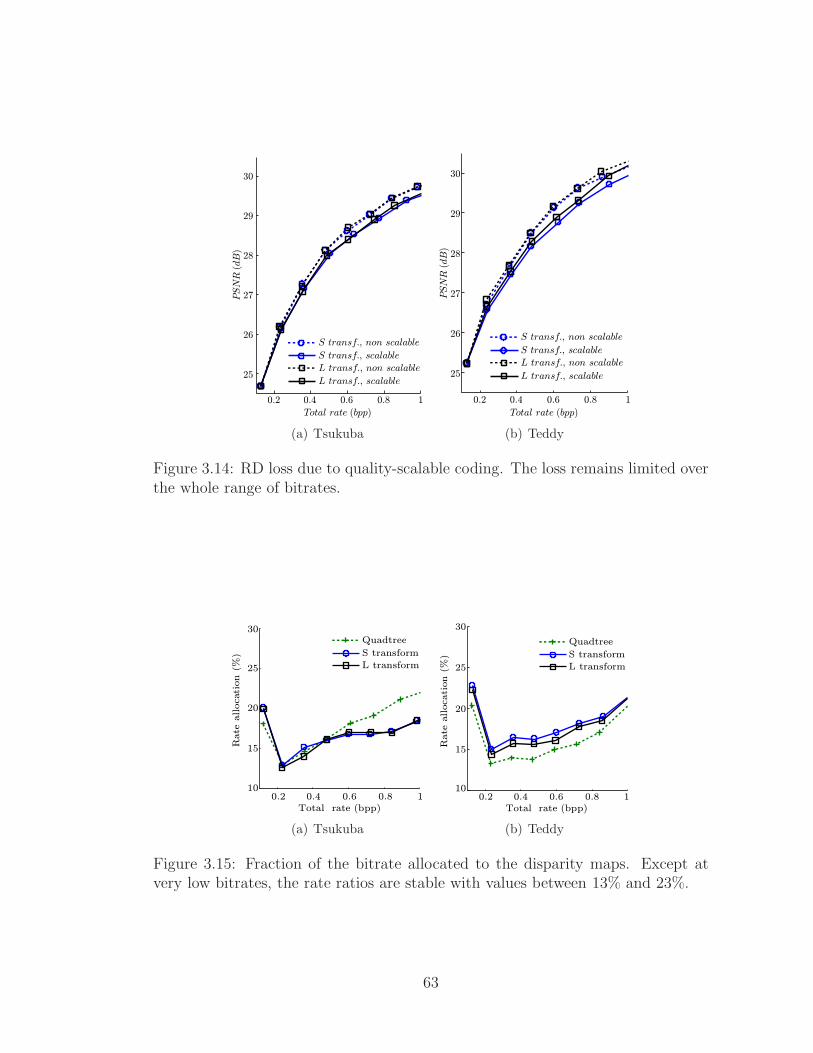
������������ �����������
������������������
������������ ���� �������
������������ ��������
��� ��� ��� ���
����� ���� ����
��
��
�
��
��
��
�������
(a) Tsukuba
������������ �����������
������������������
������������ ���� �������
������������ ��������
��� ��� ��� ���
����� ���� ����
��
��
�
��
��
��
�������
(b) Teddy
Figure 3.14: RD loss due to quality-scalable coding. The loss remains limited overthe whole range of bitrates.
��
��
��
��
��
������� ��������
������
����������
����������
��� ��� ��� ��� � ��������!""�
(a) Tsukuba
��
��
��
��
��
��
������� ��������
������
����������
����������
��� ��� ��� ��� � ��������!""�
(b) Teddy
Figure 3.15: Fraction of the bitrate allocated to the disparity maps. Except atvery low bitrates, the rate ratios are stable with values between 13% and 23%.
63

3.5 Conclusion
This chapter has proposed a novel wavelet-domain DIBR codec able to approxi-
mate static plenoptic functions inside a ROI. The wavelet coefficients for both the
images and the disparity maps have been estimated and encoded jointly to provide
an optimized bitrate allocation and reduce the ambiguity of the disparity estima-
tion. In spite of the nonlinearity of the optimization problem, a globally optimal
encoding of the disparity maps has been found using dynamic programming along
the tree of integer wavelet coefficients. In addition to the resolution scalability
intrinsic to wavelets, quality scalability has been introduced using quality layers.
Finally, experimental results on real data have confirmed the performances of the
proposed codec. Future work will aim to extend the optimization of the disparity
map to more general integer wavelets, mitigate the issues due to occlusions, and
compress dynamic plenoptic functions.
64
CHAPTER 4
JOINT ENCODING OF THEDIBR USINGSHAPE-ADAPTIVE WAVELETS
4.1 Introduction
Free-viewpoint three-dimensional television (3D-TV) provides an enhanced view-
ing experience in which users are able to perceive the third spatial dimension and
are free to move inside the 3D video [47]. With the advent of multiview autostereo-
scopic displays [47], 3D-TV is expected to be the next evolution of television after
high definition.
Three-dimensional television poses new technological challenges, which include
recording, encoding, and displaying 3D videos. At the core of these challenges
lies the massive amount of data required to represent the set of all possible views,
called the plenoptic function [24], or at least a realistic approximation of them.
The depth image based representation (DIBR) has recently
emerged as an effective approach [10], which allows both compact data repre-
sentation and realistic view synthesis. As shown in Figure 4.1, the DIBR is made
of pairs of images and depth maps, each of which provides a local approximation
of the plenoptic function. At the decoder, arbitrary views are synthesized from the
DIBR using image-based rendering [24].
Each pair of image and depth map can be seen as a four-channel image with
one channel for luma, two for chroma and one for depth. Therefore, classical im-
age and video codecs like MPEG-2, H.264/AVC, and JPEG2000 only need minor
modifications to be able to handle DIBRs [10, 47]. This approach however fails to
65

(a) Depth map and edges (b) Image and edges
Figure 4.1: Input data of the proposed DIBR codec: shared edges superimposedover a depth map (a) and an image (b).
take into consideration the fact that images and depth maps exhibit widely differ-
ent statistics, which make classical transforms like the discrete wavelet transform
(DWT) or the discrete cosine transform (DCT) ill-suited to encode DIBRs. In
particular, depth maps tend to contain sharper edges than images, which create
streaks of large coefficients in the transform domain.
In [74], it was shown that a representation based on platelets, which assumes
piecewise planar areas separated by piecewise linear edges, could lead to major
rate-distortion (RD) gains. However, the practical use of platelets is limited by
the computational cost of encoding. Unlike standard image codecs which rely on
fast transforms (such as DCT or DWT), quantizers, and entropy coders to encode
the data [19], platelets require the encoder to solve a complex RD optimization
problem.
Moreover, both platelet-based codecs and standard image codecs ignore another
source of data redundancy: the correlation between depth edges and image edges.
Indeed, the 3D scenes are usually made of objects with well-defined surfaces, which,
by projection onto the camera image plane, create edges at the same locations in
the depth map and the image.
66
In this chapter, we propose a codec which takes into account both sources of re-
dundancies. It encodes the locations of the major depth edges explicitly and treats
the regions they separate as independent during the wavelet transform by using an
extension of the shape-adaptive discrete wavelet transform (SA-DWT) [75]. The
proposed SA-DWT generates small wavelet coefficients both in smooth regions and
along the encoded edges. It is efficiently computed using lifting [19], a procedure
which is fast, in place, simple to implement, and trivially invertible. Moreover, the
explicit edge coding allows the codec to share the edge information between the
depth map and the image, which reduces their joint redundancy.
Thus the proposed codec amounts to a simple modification of a scheme that
independently codes depth and image using wavelet-based codecs. As a result, we
can benefit from the large body of existing work on wavelet-based codecs. However,
as we shall see, this modification leads to significant gains, up to 5.46 dB.
The remainder of the chapter is organized as follows. An overview of the
proposed codec is presented in Section 4.2. A detailed description of its components
is given in Sections 4.3, 4.4, and 4.5, which consider respectively the SA-DWT, the
handling of edges during lifting, and edge coding. Finally, Section 4.6 presents
experimental results.
4.2 Proposed Codec
As shown in Figure 4.2, the proposed DIBR encoder takes three signals as input,
which represent respectively the depth map, the image, and the edges. The DIBR
encoder is made of two wavelet encoders [19], one processing the depth map and
the other the image. Like standard wavelet encoders, each is made of a wavelet
transform followed by quantization and entropy coding. The DIBR decoder simply
inverses each of these steps in reverse order.
67
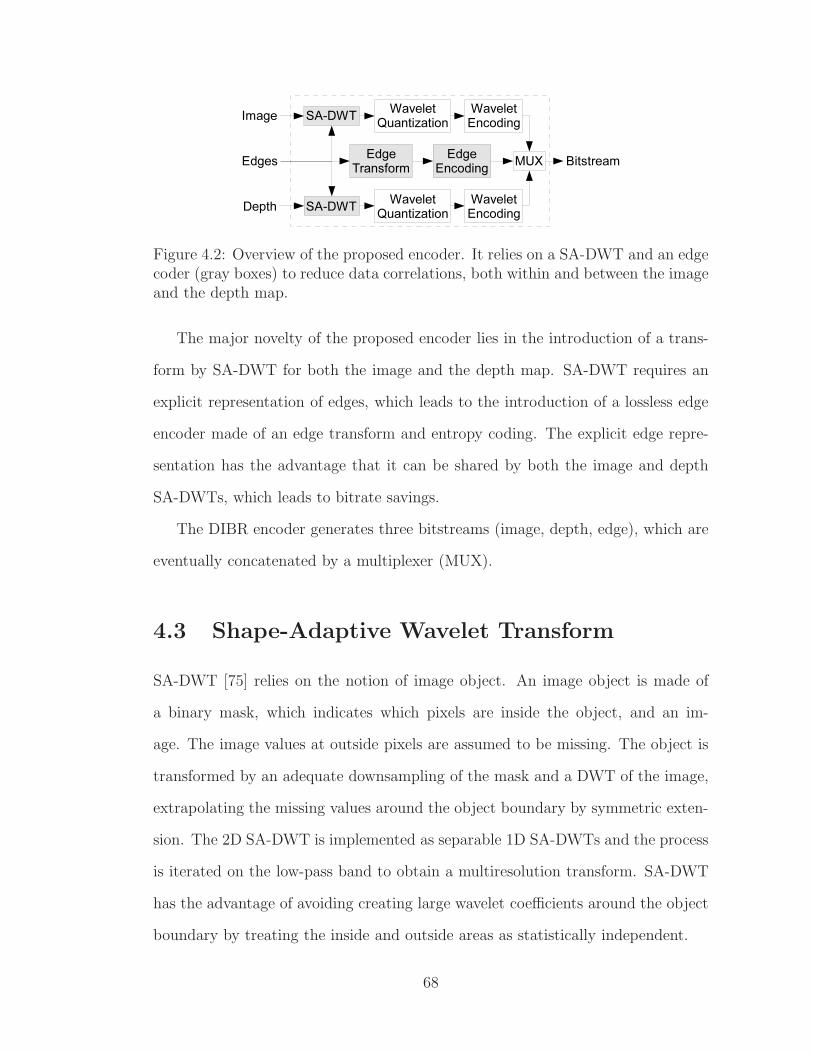
Figure 4.2: Overview of the proposed encoder. It relies on a SA-DWT and an edgecoder (gray boxes) to reduce data correlations, both within and between the imageand the depth map.
The major novelty of the proposed encoder lies in the introduction of a trans-
form by SA-DWT for both the image and the depth map. SA-DWT requires an
explicit representation of edges, which leads to the introduction of a lossless edge
encoder made of an edge transform and entropy coding. The explicit edge repre-
sentation has the advantage that it can be shared by both the image and depth
SA-DWTs, which leads to bitrate savings.
The DIBR encoder generates three bitstreams (image, depth, edge), which are
eventually concatenated by a multiplexer (MUX).
4.3 Shape-Adaptive Wavelet Transform
SA-DWT [75] relies on the notion of image object. An image object is made of
a binary mask, which indicates which pixels are inside the object, and an im-
age. The image values at outside pixels are assumed to be missing. The object is
transformed by an adequate downsampling of the mask and a DWT of the image,
extrapolating the missing values around the object boundary by symmetric exten-
sion. The 2D SA-DWT is implemented as separable 1D SA-DWTs and the process
is iterated on the low-pass band to obtain a multiresolution transform. SA-DWT
has the advantage of avoiding creating large wavelet coefficients around the object
boundary by treating the inside and outside areas as statistically independent.
68

This is this idea of statistically independent areas that we shall use to efficiently
code the DIBR. In our case, however, there is no single object. Instead, the DIBR
is made of multiple superimposed objects. This issue is overcome by replacing the
binary mask by a binary edge map and by treating the areas on opposite sides of
the edges as statistically independent.
Figure 4.3 presents an example of signal processed by the proposed SA-DWT.
The SA-DWT clearly creates much less nonzero wavelet coefficients around edges
than the standard DWT, which leads to bitrate savings. SA-DWT has the dis-
advantage of requiring a bitrate overhead to code the edge location. However,
experiments show that this overhead is more than compensated by the savings.
We rely on lifting [19] to implement the 1D SA-DWT. First, we present the
standard lifting and then describe the modifications making it shape adaptive. The
lifting splits the samples at odd and even locations into two cosets and modifies
them alternatively using a series of “steps.”
By convention, lifting begins by modifying the odd coset by a so-called “predict”
step, which transforms a signal x into a signal y such that
y2t = x2t,
y2t+1 = x2t+1 + λ2k(x2t + x2t+2),
(4.1)
where t denotes the sample locations, 2k the step number, and λ2k a weight. The
even coset is modified by a so-called “update” step, which transforms a signal x
into a signal y such that
y2t = x2t + λ2k+1(x2t−1 + x2t+1),
y2t+1 = x2t+1.
(4.2)
Figure 4.4 shows a graphical example of these lifting steps. Weights λ for
69

(a) Signal made of constant, linear and cubic pieces. The dashed red lines indicateedges.
(b) High-pass bands of a standard 9/7DWT with symmetric extension.
(c) High-pass bands of a 9/7 SA-DWTwith cubic extension.
Figure 4.3: Comparison of standard and shape adaptive DWTs. In the latter case,all but the coarsest high-pass band are zero.
70

Figure 4.4: The four lifting steps associated with a 9/7 wavelet, which transformthe signal x first into a and then into y. The values x2t+2 and a2t+2 on the otherside of the edge (dashed vertical line) are extrapolated. They have dependencieswith the values inside the two dashed triangles.
classical wavelets like the 5/3 or the 9/7 can be found in [19]. After the final
update step, the odd coset contains the high-pass coefficients and the even coset
the low-pass ones.
Standard lifting is made shape adaptive by modifying (4.1) and (4.2) at lo-
cations where they would perform a weighted addition of two samples xt and xt′
separated by an edge. In that case, the sample xt′ which is not on the same side of
the edge as the sample yt being computed is considered missing and is extrapolated
from samples on the same side as yt. Designing effective extrapolation methods is
the topic of the following section.
71

4.4 Lifting Edge Handling
Our goal is to design extrapolation methods which lead to null high-pass coefficients
around edges. The symmetric extension [75] ensures the continuity of the signal
across the edge but not of its higher order derivatives. Therefore, even wavelets
which zero out high-order polynomials are not able to zero them out near edges.
The extrapolation design we now present is able to overcome this limitation.
In the following, we only consider extrapolation on the right side of edges, as
shown in Figure 4.4. Left-side extrapolation follows by symmetry. Let us assume
that there is an edge at T + 1/2 and that left of this edge the signal is polynomial
of degree L, that is,
xt =
L∑
k=0
αktk, ∀t ≤ T. (4.3)
In order for lifting to be performed, some of the samples on the right side of
the edge need to be estimated. In Figure 4.4, where T = 2t + 1, these samples
are x2t+2 and a2t+2. We choose to extrapolate them using a weighted sum of the
samples on the left of the edge, using an equation of the form
zT+1 =
L∑
k=0
µkzT−1−2k (4.4)
where z denotes the signal and µ the vector of unknown weights. The extrapolation
only relies on samples from the same coset to maintain invertibility and in-place
computation.
If the wavelet zeroes out polynomials of degree L, all high-pass coefficients left
of the edge should be zero. Among all these equations, only those near the edge
depend on µ. In Figure 4.4, this corresponds to y2t−1 and y2t+1. We write them
as functions of µ, λ, and T using (4.1), (4.2), (4.3), and (4.4). Setting them to
zero gives a system of polynomials in T . We want the solution to be invariant
72

to even shifts of the edge, which means that the polynomials must be identically
zero. Therefore all the polynomial coefficients are zero, which gives rise to L new
equations per polynomial. The unknown weights µ are obtained by solving this
system of equations.
Writing and solving the equations may be quite tedious but can be easily done
by mathematical software and the solutions are particularly simple. In the case
of 5/3 wavelets, which zeroes out linear polynomials, an extrapolation with L = 0
gives the standard symmetric extension with µ = 1 and an extrapolation with L =
1 gives a linear extension with µ = [ 2 −1 ]. In the case of the 9/7, which zeroes
out cubic polynomials, both of these extrapolations hold true and an extrapolation
with L = 3 gives a cubic extension with µ = [ 4 −6 4 −1 ]. The effectiveness
of this latter extrapolation is demonstrated in Figure 4.3.
The proposed method fails in two cases. First, when the edge location is of
the form 2t + 1/2, the unknown high-pass coefficient y2t+1 has a dependency with
the low-pass coefficient y2t but not with any high-pass coefficient on the left of the
edge. There is therefore no equation available to solve its extrapolation. However,
we can assume that the polynomial is perfectly fitted on the right side of the
edge, which means that y2t+1 is zero. The extrapolation also fails when there is an
insufficient number of samples between two edges. In that case, the order L of the
extrapolation is reduced.
4.5 Edge Representation and Coding
The SA-DWT requires an explicit knowledge of the edge locations. In 1D, these
edges are located at half-integer locations between samples. In 2D, they are lo-
cated between samples along rows and columns, which gives rise to an edge lattice
dual to the sample lattice, as shown in Figure 4.5. Edges are either horizontal,
73

Figure 4.5: Example of the dual lattices of samples and edges. Each edge indicatesthe statistical independence of the two half rows or half columns of samples itseparates.
splitting columns, or vertical, splitting rows. We represent them by two binary
edge maps, denoted respectively e(h)s+1/2,t and e
(v)s,t+1/2 where s and t denote integer
spatial locations.
Moreover, the SA-DWT is a multiresolution transform where each low-pass
band must be associated with a pair of edge maps. Let use denote by xs,t,j the
samples at resolution level j and by e(h)s+1/2,t,j and e
(v)s,t+1/2,j the associated depth
maps. The pyramid of edge maps is obtained by iterative downsampling using the
equations
e(h)s+1/2,t,j = max
(
e(h)2s+1/2,2t,j−1, e
(h)2s+1+1/2,2t,j−1
)
e(v)s,t+1/2,j = max
(
e(v)2s,2t+1/2,j−1, e
(v)2s,2t+1+1/2,j−1
)
. (4.5)
The edge maps at the finest resolution j = 0 are encoded using a differential
Freeman chain code inspired from [76]. Each edge along the chain can take one of
the four directions {right, up, left, down} numbered from 0 to 3. The direction of
the nth edge is denoted dn and the differential direction ∆n between two consecutive
edges is defined by
∆n = dn − dn−1. (4.6)
74

Directions are recovered iteratively from differential directions using the equation
dn = dn−1 + ∆dn mod 4 (4.7)
where mod denotes the modulo operator.
The chain code is made of a chain header which stores the location of the
first edge end-point and the first direction and a chain body which stores the
differential directions. In the example of Figure 4.5, the chain code is 14+½, 23+½;0 ; -1, 0, 0, +1, 0. Finally, the chain code is entropy coded to generate the
bitstream. Fixed-length codes are used for the header and simple variable-length
codes {−1 : 10, 0 : 0, +1 : 11} are used for the body, to take advantage of the
large number of zeros.
4.6 Experimental Results
We present experimental results on the Teddy set, shown in Figure 4.1. The DIBR
is 375×450 in size with intensities in the range [0, 255] and depths in [0, 53]. For
simplicity, only the luma channel of the image is considered. Missing values in the
depth maps have been interpolated using in-painting. Edges have been obtained
in a semiautomatic way by applying a Canny edge detector to the depth map and
letting the user choose which edge chains to keep.
We compare the performances of two codecs: one based on the DWT and the
other on the proposed SA-DWT with explicit edge coding. Both codecs perform
a five-level decomposition and rely on the same quantizer and entropy coder, pro-
vided by the SPIHT implementation of the QccPack library. They also rely on the
same 9/7 wavelet for the transform, which is the main wavelet in JPEG2000 [19].
Following [77], both codecs allocate 20% of the bitrate to the depth.
75

(a) Std9/7sym (b) SA9/7lin
Figure 4.6: Absolute values of the high-pass coefficients of the depth map usingstandard and shape-adaptive wavelets. The latter provides a much sparser decom-position.
The two codecs differ in their handling of edges: the DWT-based codec uses the
standard 9/7 wavelet with symmetric extension, denoted “std9/7sym,” while the
SA-DWT-based codec uses the shape-adaptive 9/7 wavelet with linear extension,
denoted “SA9/7lin,” for the depth map and the shape-adaptive 9/7 wavelet with
symmetric extension, denoted “SA9/7sym,” for the image. The SA-DWT-based
codec also includes an edge codec, as shown in Figure 4.2. The experiments are
based on the edge map shown in Figure 4.1, which has a bitrate overhead of
0.015 bpp.
Figure 4.6 shows the wavelet coefficients of the depth map obtained using
std9/7sym and SA9/7lin. The standard transform exhibits large values along
edges, which are absent from the shape-adaptive transform. The entropy of the
latter is therefore much reduced.
Figure 4.7 shows the reconstructed depth map at 0.04 bpp using the standard
and shape-adaptive codecs. Even at low bitrates, the latter reconstructs sharp
edges and avoids Gibbs artifacts along edges. Moreover, the sparser nature of the
SA-DWT coefficients means that the shape-adaptive codec is able to spend more
76

(a) Std9/7sym - 36.21 dB (b) SA9/7lin - 39.86 dB
Figure 4.7: Reconstruction of the depth map at 0.04 bpp using standard andshape-adaptive wavelets. The latter gives sharp edges free of Gibbs artifacts.
bits outside edge areas, which leads for instance to a slightly better reconstruction
of the bottom right of the depth map.
Figure 4.8(a) compares the RD performances of the two codecs for the depth
map. The bitrate consists in the wavelet coefficients, along with the edges in
the shape-adaptive case. The figure shows that the edge overhead is more than
compensated by the reduced entropy of the wavelet coefficients. This leads to
PSNR gains over the whole bitrate range, achieving up to 5.46 dB.
Figure 4.8(b) compares the RD performances of the two codecs for the image.
The bitrate is made of the wavelet coefficients in both cases, the edge overhead
having been accounted for in the depth bitrate. The figure shows PSNR gains over
the whole bitrate range, achieving up to 0.19 dB.
4.7 Conclusion
We have presented a novel codec of DIBRs for free-viewpoint 3D-TV. By replacing
the DWT of classical image codecs by a SA-DWT and adding an edge encoder, we
have been able to obtain significant PSNR gains, achieving up to 5.46 dB. Future
work shall consider the automatic extraction of edges based on RD considerations.
77

(a) Depth map (b) Image
Figure 4.8: Rate-distortion performances of standard and shape-adaptive wavelets.The latter gives PSNR gains of up to 5.46 dB on the depth map and 0.19 dB onthe image.
78

CHAPTER 5
3D MODEL-BASED FRAMEINTERPOLATION FOR DVC
5.1 Introduction
Distributed source coding (DSC) has gained interest for a range of applications such
as sensor networks, video compression, or loss-resilient video transmission. DSC
finds its foundation in the seminal Slepian-Wolf [78] and Wyner-Ziv [79] theorems.
Most Slepian-Wolf and Wyner-Ziv coding systems are based on channel coding
principles [80–86]. The statistical dependence between two correlated sources X
and Y is modeled as a virtual correlation channel analogous to binary symmet-
ric channels or additive white Gaussian noise (AWGN) channels. The source Y
(called the side information) is thus regarded as a noisy version of X (called the
main signal). Using error correcting codes, the compression of X is achieved by
transmitting only parity bits. The decoder concatenates the parity bits with the
side information Y and performs error correction decoding, i.e., MAP or MMSE
estimation of X given the received parity bits and the side information Y .
Compression of video streams can be cast into an instance of side information
coding, as shown by Aaron et al. [87–89] and Puri et al. [90–92]. These schemes
are also referred to as distributed video coding (DVC) systems. A comprehensive
survey of distributed video compression can be found in [93]. One key aspect in the
performance of the system is the mutual information between the side information
and the information being Wyner-Ziv encoded. In current approaches, the side
information is generated via motion-compensated frame interpolation, often using
79

block-based motion compensation (BBMC) [93]. Motion fields are first computed
between key frames, which may be distant from one another. An interpolated
version of these motion fields is then used to generate the side information for
each WZ frame. The frame interpolation based on these interpolated motion fields
is not likely to lead to the highest possible PSNR, hence to the highest mutual
information between the side information and the Wyner-Ziv encoded frame. To
cope with these limitations, BBMC is embedded in a multiple motion hypothesis
framework in [93,94]. The actual motion vectors are chosen by testing the decoded
frames against hash codes or CRCs.
Here, we address the problem of side information generation in distributed cod-
ing of videos captured by a camera moving in a 3D static environment with Lam-
bertian surfaces. This problem is of particular interest to specialized applications
such as augmented reality, remote controlled robots operating in hazardous envi-
ronments, and remote exploration by drones or planetary probes. We explore the
benefits of more complex motion models belonging to the Structure-from-Motion
(SfM) paradigm [16]. These motion models exhibit strong geometrical properties,
which allow their parameters to be robustly estimated. Note that, unlike predic-
tive coding, DVC has the advantage of not requiring the transmission of motion
model parameters. Therefore, increasing the complexity of motion models, and
thus their ability to accurately represent complex motions, offers potential gains
in mutual information without additional bitrate overheads.
When used in computer vision applications, SfM approaches aim at generating
visually pleasing virtual views [8]. On the other hand, when used in DVC, the
objective is to generate intermediate frames (the side information) with the highest
PSNR. This requires a reliable estimation of the camera parameters as well as
sub-pel precision of the reprojected 3D model, especially in edge regions where
even small misalignments can have a strong impact on the PSNR. In addition,
80

constraints on latency in applications such as video streaming, as well as memory
constraints, prevent the reconstruction of the 3D scene from all the key frames at
once, as is usually done in SfM. Instead, a sequence of independent 3D models is
reconstructed from pairs of consecutive key frames.
In this chapter, we first describe two 3D model-based frame interpolation meth-
ods relying on SfM techniques, one block-based and one mesh-based, both being
constrained by the epipolar geometry. These first approaches suffer from the follow-
ing limitation. The motion fields associated with the intermediate frames are inter-
polated with the classical assumption of linear motion between key frames. This
creates misalignments between the side information and the actual WZ frames,
which have a strong impact on the rate-distortion (RD) performances of the 3D
model-based DVC solution.
This observation led us to introduce two methods to estimate the intermediate
motion fields with the help of point tracks, instead of interpolating them. The
motion fields are thus obtained by computing the camera parameters at interme-
diate time instants using point tracks. A first technique relies on feature point
tracking at the decoder, each frame being processed independently at the encoder.
In addition to the key frames, the encoder extracts and transmits a limited set
of feature points which are then linked temporally at the decoder. Feature point
tracking at the decoder greatly reduces misalignments, thereby increasing the side
information PSNR with, in turn, a significant impact on the RD performances of
the 3D model-based DVC system. These performances are then further improved
by introducing the tracking at the encoder. The encoder thus shares some limited
information between frames under the form of intensity patches to construct the
tracks sent to the decoder. The latter method has the additional advantage of giv-
ing the encoder a rough estimation of the video motion content, which is sufficient
to decide when to send key frames. Note that the problem of key frame selection
81
has already been studied in the context of SfM [95] and predictive coding [96].
However, it relied on epipolar geometry estimation at the encoder, which DVC
cannot afford. An alternative to tracking has been proposed in [97], where the
authors advocate the use of statistics on intensities and frame differences.
The remainder of the chapter is organized as follows. Section 5.2 presents the
estimation of the 3D model, while Sections 5.3 and 5.4 describe the model-based
frame interpolation, using the assumption of linear motions in the former and point
tracks in the latter. Finally, Section 5.5 presents our experimental results.
5.2 3D Model Construction
5.2.1 Overview
We begin by presenting a codec based on the assumption of linear motions, that is,
without point tracking. This codec, called 3D-DVC, derives from the DVC codec
described in [93, 98], as outlined in Figure 5.1. At the encoder, the input video
is split into groups of pictures (GOP) of fixed size. Each GOP begins with a key
frame, which is encoded using a standard intracoder (H.264-intra in our case) and
then transmitted. The remaining frames (WZ frames) are transformed, quantized,
and turbo-encoded. The resulting parity bits are punctured and transmitted.
At the decoder, the key frames are decompressed and the side information is
generated by interpolating the intermediate frames from pairs of consecutive key
frames. The turbo-decoder then corrects this side information using the parity
bits. The proposed decoder differs from classical DVC by its novel 3D model
construction and model-based frame interpolation.
In this section, we first describe the 3D model construction, whose overall
architecture is presented in Figure 5.2. Unlike the SfM techniques it extends,
82

Figure 5.1: Outline of the codec without point tracking (3D-DVC). The proposedcodec benefits from an improved motion estimation and frame interpolation (grayboxes).
Figure 5.2: Outline of the 3D model construction.
the proposed model construction focuses on the PSNR of the interpolated frames
to maximize the quality of the side information. Toward that goal, we present
a novel robust correspondence estimation with subpixel accuracy. In particular,
correspondences are scattered over the whole frames and are dense in areas of high
gradients. Furthermore, the 3D model construction is robust to quantization noise.
After introducing some notation, we shall first describe the camera parameter
estimation and then the correspondence estimation.
5.2.2 Notation
We shall use the typesettings a, a,A to denote respectively scalars, column vectors,
and matrices. In the following, a(t)j (i) denotes the jth scalar-entry of the ith vector
of a set at time t. Likewise for matrices, Aij denotes the scalar entry at the ith row
and jth column, while Ai: represents its ith row vector. Moreover, A⊺ denotes the
83
transpose of matrix A, As the column vector obtained by stacking the A⊺
i: together,
and [.]× the cross-product operator. The identity matrix will be denoted by I and
the norms 1 and 2 respectively by ‖.‖1 and ‖.‖2. We shall use homogeneous vectors,
where x , (x, y, 1)⊺ and X , (x, y, z, 1)⊺ represent respectively a 2D and a 3D point.
These entities are defined up to scale, i.e., (x, y, 1)⊺ is equivalent to (λx, λy, λ)⊺ for
any nonnull scalar λ. Without loss of generality, the two key frames are assumed
to have been taken at times t = 0 and t = 1 and are respectively denoted by 0I
and 1I.
5.2.3 Camera parameter estimation
We assume here that an initial set of point correspondences {x(0), x(1)} between the
two key frames is available. It is used to estimate both the camera parameters,
e.g., translation and rotation between the key frames, and the depth associated
with each point correspondence.
Robust weak-calibration
The assumption of static scene introduces a constraint on correspondences given
by the equation
x(1)⊺ F x(0) = 0 (5.1)
where F is the so-called fundamental matrix from which the camera parameters
shall be extracted.
The robust weak-calibration procedure aims at estimating this fundamental
matrix. As an additional feature, it identifies erroneous correspondences. It con-
sists of three steps:
1. an initial estimation of F and the set of inliers using MAPSAC [99],
84

2. a first refinement of F and the set of inliers using LO-RANSAC [100],
3. a second refinement of F over the final set of inliers by a nonlinear minimiza-
tion of the Sampson distance [16].
Quasi-Euclidean self-calibration and triangulation
The next step is to recover the projection matrices P and the depths λ. We can
choose the world coordinate system (WCS) of the 3D scene to be the camera
coordinate system at time t = 0, leading to P(0) = [I 0]. This leaves four degrees
of freedom in the WCS. They appear in the relation between F and the projection
matrix of the second key frame P(1) , [R(1) t(1)], given by
t(1) ∈ ker (F⊺) and R(1) = [t(1)]×F− t(1) a⊺ (5.2)
where a is an arbitrary 3-vector and t(1) has arbitrary norm. For the time being,
these degrees of freedom are fixed by choosing t(1) with unit norm and setting
a = t(0), where the epipoles t(0) and t(1) are recovered from the singular value
decomposition (SVD) of the matrices F and F⊺, respectively [16]. Since projec-
tion matrices are defined up-to-scale, in the remainder of the chapter they are
normalized so that their Frobenius norm will be√
3.
The depths can then be recovered. Let a 3D point X project itself onto a 2D
point x on the camera image plane. These two points are related by λx = PX
where λ is the projective depth. Therefore, correspondences allow the recovery of
a cloud of 3D points by triangulation, solving the system of equations
λ(1)x(1) = λ(0)R(1)x(0) + t(1) (5.3)
for each correspondence.
85

The initial choice of WCS is refined by quasi-Euclidean self-calibration [101],
so that the WCS is as Euclidean as possible. We also constrain the depths in
the new WCS to be bounded by 1 and M to reduce numerical issues during the
bundle adjustment detailed later. Assuming that the camera parameters cannot
undergo large variations between key frames, we look for a matrix R(1) as close
as possible to the identity matrix and compatible with the fundamental matrix F.
The optimal vector a is then found by minimizing∥
∥R(1) − t(1) at − I∥
∥
1under the
linear constraints
max(λ(0), λ(1))/M ≤ λ(0)x(0)⊺a− 1 ≤ min(λ(0), λ(1)). (5.4)
A lower bound on the value of M is given by max(λ(0), λ(1))/ min(λ(0), λ(1)). The
self-calibration starts with this value and increases it until the linear programming
problem admits a solution.
Bundle adjustment
The camera parameters and the depths obtained so far suffer from the bias inherent
to linear estimation [102]. They can be refined by minimizing their Euclidean
reprojection error on the key frames. First, the basis of the projective space has
to be fixed to prevent it from drifting. This is done by fixing two 3D points
and performing the optimization over a reduced parameter space. As shown in
Appendix A, the 12-dimensional projection matrix P(1) can be expressed as a
linear combination of an 8-dimensional unit vector r, i.e., P(1)s =√
3Wr where W
is an orthonormal matrix. The two fixed 3D points are chosen randomly under the
constraints that they have small reprojection errors and that they are far from the
epipoles and from each other.
86

The minimization of the Euclidean reprojection error is defined as
min{λ(0)},r
J(
{x(0)}, {λ(0)}, {x(1)},√
3Wr)
such that ‖r‖2 = 1
(5.5)
where J is the euclidean reprojection error given by
J(
{x(0)}, {λ(0)}, {x(t)},P(t)s)
,
∑
i
(
x(t)(i)−[
λ(0)(i)x(0)⊺(i) 1]
P(t)s1:4
[λ(0)(i)x(0)⊺(i) 1]P(t)s9:12
)2
+∑
i
(
y(t)(i)−[
λ(0)(i)x(0)⊺(i) 1]
P(t)s5:8
[λ(0)(i)x(0)⊺(i) 1]P(t)s9:12
)2
.
(5.6)
The minimization is solved using an alternated reweighted linear least square ap-
proach [103], as detailed in Appendix B. A refined fundamental matrix is then
deduced using F = [t(1)]×R(1) and refined point correspondences are obtained us-
ing reprojection.
5.2.4 Correspondence estimation
We now turn to the estimation of the set of point correspondences {x(0), x(1)}
between the two key frames.
Feature point detection
First, feature points {x} are detected on each key frame independently. We use
the Harris-Stephen corner detector [104] to find feature points. Its sensitivity is
adapted locally to spread feature points over the whole frame [16], which improves
the weak-calibration detailed previously.
87

Feature point matching
Feature points are then matched across key frames to form correspondences. All
pairs of feature points{
x(0), x(1)}
are considered as candidate correspondences. A
first series of tests eliminates blatantly erroneous correspondences:
1. Correspondences with very large motions are discarded.
2. Correspondences with dissimilar intensity distributions in the neighborhoods
around feature points are discarded. Distributions are approximated using
Parzen windows [105, §4.3] and sampled uniformly to obtain histograms. The
similarity of histograms is tested using the χ2-test [66, §14.3].
Subpixel refinement
The locations of the remaining correspondences are then refined locally by search-
ing for the least mean square error (MSE) between neighborhoods around feature
points. The minimization is solved using the Levenberg-Marquardt algorithm [66,§15.5]. This refinement compensates for errors from the Harris-Stephen detector,
leads to values of MSE independent of image sampling [106], and computes feature
point locations with subpixel accuracy.
Outlier removal
A second series of tests is applied to eliminate erroneous correspondences. These
tests are performed when camera parameter estimation provides the necessary
information (see Figure 5.2).
1. MSE: Correspondences with large MSE are discarded.
2. Unicity: Each feature point is only allowed to belong to at most one cor-
respondence. This unicity constraint is enforced using the Hungarian algo-
88

rithm [68, §I.5], which keeps only the correspondences with the least MSE
when the unicity constraint is violated.
3. Epipolar: Correspondences identified as outliers during the robust weak-ca-
libration are discarded.
4. Motion: Correspondences with aberrant motion are removed by testing the
difference between their motion and the weighted median of the motions of
their neighbors positioned on Delaunay triangles [107, Chap. 9]. Neighbors
are assigned weights inversely proportional to their distances.
5. Reprojection: The projection of the 3D points must be close to the actual
2D points.
6. Chirality: All products of projective depths λ(0)λ(1) must have the same
sign [108, Th. 17],
7. Epipole: Correspondences must be far from epipoles, since triangulation is
ill-conditioned around them.
8. Depth: Points with aberrant depths compared to the depths of their neigh-
bors are removed.
Correspondence propagation
The set of correspondences obtained so far is reliable and accurate but still fairly
sparse. It is first densified over unmatched feature points by increasing the toler-
ance of the tests described previously and enforcing motion smoothness using the
weighted median of neighboring motions.
Correspondences are then propagated along edges, under the epipolar con-
straint. The goal of this procedure is to get accurate motion information in edge
89
regions, where even a slight misalignment can lead to large MSE, degrading the
side information PSNR.
The intersections of edges with epipolar lines define points, except where epipo-
lar lines and edge tangents are parallel. Therefore, correspondences can be obtained
not only at feature points, but also along edges. Edges are found in the first key
frame using the Canny edge detector [12]. Correspondences are propagated along
edges, starting from correspondences between the feature points. At each itera-
tion, edge-points around previously known correspondences are selected and their
motions are initialized to those of their nearest neighbors. Their motions are then
improved by full search over small windows along associated epipolar lines, mini-
mizing the MSE between intensity neighborhoods. Their motions are finally refined
by a Golden search [66, §10.1] to obtain subpixel accuracy. The robustness of this
procedure is increased by removing edge-points too close to the epipole, as well as
those whose edge tangents are close to epipolar lines or which have large MSE.
5.2.5 Results
Figures 5.3(a) and 5.3(b) show the correspondences obtained between the first
two key frames of the sequences street and stairway, after respectively robust
weak-calibration and correspondence propagation. In both cases, the epipolar
geometry was correctly recovered and correspondences are virtually outlier-free.
Moreover, propagation greatly increases the correspondence density, from 394 cor-
respondences to 9982 for the street sequence and from 327 correspondences to
6931 for the stairway sequence. The two figures also underline some intrinsic lim-
itations of the SfM approach. First, the street sequence has epipoles inside the
images, as can be seen by the converging epipolar lines. Since triangulation is
singular around the epipoles, there are no correspondences in their neighborhoods.
90

(a) Epipolar geometry after robust weak calibration
(b) Correspondences after propagation along edges
Figure 5.3: Correspondences and epipolar geometry between the two first losslesskey frames of the sequences street and stairway. Feature points are represented byred dots, motion vectors by magenta lines ending at feature points, and epipolarlines by green lines centered at the feature points.
Second, the stairway sequence contains strong horizontal edges whose tangents are
nearly parallel to the epipolar lines. This explains why so few correspondences
were found in this region, while the wall is covered by correspondences.
5.3 3D Model-Based Interpolation
The frame interpolation methods developed in this chapter rely on the projection
of the 3D scene onto camera image planes. This projection requires the knowledge
of the projection matrices associated with the interpolated frames as well as the
knowledge of a dense motion field between the frame being interpolated and each
of the two key frames. We consider two motion models to obtain dense motion
91

fields from the correspondences and the projection matrices: one block-based and
one mesh-based, both being constrained by the epipolar geometry.
5.3.1 Projection-matrix interpolation
The projection matrices at intermediate time instants can be recovered by gener-
alizing the bundle-adjustment equation (Equation 5.5) to three or more frames
min{λ(0)},{P(t)s}
∑
t
J(
{x(0)}, {λ(0)}, {x(t)},P(t)s)
such that
P(1)s =√
3Wr
‖r‖22 = 1
‖P(t)s‖22 = 3, 0 < t < 1
.
(5.7)
In this equation, the projection matrices P(t) are independent of one another.
They are therefore solutions of simple reweighted linear least square problems.
Since the locations {x(t)(i)} of the feature points on the intermediate frames
are unknown to the decoder, they need to be interpolated by assuming for instance
that they undergo linear motions
x(t)(i) = (1− t)x(0)(i) + tx(1)(i). (5.8)
The codec based on this assumption is called 3D-DVC. Section 5.4 will present
two other codecs that make use of additional information from the encoder to avoid
this assumption.
5.3.2 Frame interpolation based on epipolar blocks
In the first motion model, each intermediate frame is divided into blocks whose
unknown texture is to be estimated. The search space of the motion vectors
92

Figure 5.4: Trifocal transfer for epipolar block interpolation.
is limited by the epipolar constraints and trifocal transfer [109]. As shown in
Figure 5.4, given a block located at x(t) in the intermediate frame, its corresponding
blocks in the key frames lie along the epipolar lines l(0) and l(1). For a given
candidate location in a reference key frame, say x(0) in I(0), the location of the
corresponding block x(1) in the other key frame I(1) is uniquely defined via trifocal
transfer: triangulation of points x(0) and x(t) gives the 3D point X, which is then
projected onto I(1) to give x(1). The key frame whose optical center is the farthest
away from the optical center of the interpolated frame is chosen as the reference
key frame, so that the equations of trifocal transfer are best conditioned.
As outlined in Figure 5.5, the algorithm initializes the motions of the blocks
using the motions of the nearest correspondences. It then refines them by mini-
mizing the MSE of the block textures in the key frames, using a local full search
along the epipolar lines followed by a Golden search [66, §10.1] to obtain subpixel
accuracy. Since trifocal transfer is singular around epipoles, the motions of the
blocks too close to the epipoles are not refined. Finally, the block textures from
the key frames are linearly blended based on time to obtain the texture of the
block in the interpolated frame.
93

Figure 5.5: Outline of the frame interpolation based on epipolar blocks.
5.3.3 Frame interpolation based on 3D meshes
In the second motion model, the first key frame is divided into blocks which are
themselves subdivided into pairs of triangles, thus forming a triangular mesh. Each
vertex i is associated with two locations{
x(0)(i), x(1)(i)}
, one in each key frame.
Due to the epipolar geometry, the second location is constrained to lie on an
epipolar line such that
x(1)(i) = q(i) + λ(i)t(i) (5.9)
where t(i) is a line tangent vector, q(i) a point on the line, and λ(i) a scalar. All
these quantities are stacked together to form a matrix T and two vectors q and λ.
Likewise, the point correspondences obtained in Section 5.2 are stacked into two
location vectors x(0) and x(1).
As outlined in Figure 5.6, the mesh is first fitted to the set of correspondences.
Mesh fitting is cast into a minimization problem using a Tikhonov regularization
approach [110]. The motion inside each triangle is assumed to be affine, which
approximates the projection of a piecewise-planar 3D mesh. Therefore, the motion
of any point in the first key frame can be written as a linear combination of
the motions of the mesh vertices. Let us represent these linear combinations by
the matrix M. The mesh also has an internal smoothness, which favors small
differences between the motion of a vertex and the average motion of its four
neighbors. Since the average is a linear operation, it can be represented by a matrix
94

Figure 5.6: Outline of the frame interpolation based on 3D meshes.
N. Let µ be a scalar controlling the smoothness of the mesh. The minimization
problem is then
minλ‖x(1) −M(q + Tλ)‖22 + µ2‖ (I−N) (q + Tλ)‖22. (5.10)
This is a linear least-square (LLS) problem, which can readily be solved.
Since LLS is not robust to outliers, an additional step removes them. Outliers
are detected by testing whether the mesh triangles abide by these two criteria:
1. They must have the same orientation in both key frames.
2. The motion compensation errors must be small.
Correspondences inside triangles failing these tests are considered outliers. Once
they have been removed, the mesh is fitted again. This process is iterated until all
triangles pass the tests.
Finally, the mesh is reprojected onto intermediate frames using trifocal transfer.
The key frames are warped using 2D texture mapping [65] and linearly blended
based on time.
5.3.4 Comparison of the motion models
Epipolar block motion fields approximate well depth discontinuities but only pro-
vide a fronto-parallel approximation of the 3D surfaces. On the other hand, mesh-
based motion fields are able to approximate 3D surfaces with any orientations and
95

(a) Epipolar block matching (b) 3D mesh
(c) Classical block matching
Figure 5.7: Norm of the motion vectors between the first two lossless key framesof the stairway sequence for epipolar block matching (a), 3D mesh fitting (b), andclassical 2D block matching (c).
are more robust to outliers due to their internal smoothness. At the same time
they tend to over-smooth depth discontinuities and they do not model occlusions.
These properties are clearly visible in Figure 5.7, which shows the norm of the mo-
tion vectors on the stairway sequence obtained by the two motion estimations. The
same figure also displays the motion field obtained using classical 2D block-based
motion estimation. In comparison, both proposed motion estimations exhibit a
reduced number of outliers.
96

5.4 3D Model-Based Interpolation with Point
Tracking
5.4.1 Rationale
The fact that the above 3D-model based interpolation techniques barely increase
the PSNR of the side information comes from the underlying assumption that the
tracks have linear motion (5.8) during the estimation of the intermediate projection
matrices (5.7), which gives inaccurate projection matrices. Since the motion fields
are obtained by projecting 3D points or a 3D mesh onto image planes, inaccurate
projection matrices lead to misalignments between the interpolated frames and the
actual WZ frames. These misalignments then create large errors in regions with
textures or edges, which penalize the PSNR.
Instead of linear interpolating correspondences to obtain tracks, it is proposed
here to detect actual tracks from the original frames. The linear motion assumption
represented by (5.8) is thus not used any more. We propose two methods to achieve
this goal: one tracking points at the decoder and one tracking them at the encoder.
These methods lead to two DVC codecs referred to as 3D-DVC-TD and 3D-DVC-
TE, respectively. In both methods, a set of feature points is extracted at the
encoder with a Harris-Stephen feature-point detector [104]. When the tracking is
performed at the decoder, the set of feature points is encoded and transmitted to
the decoder. When the tracking is done at the encoder, a list of tracked positions
per feature point is encoded and transmitted. Unlike previous works [93, 94], no
information is sent about the actual intensities of the WZ frames.
Computing and transmitting the feature points or tracks introduces overheads
on the encoder complexity and on the bandwidth. However, these overheads are
minor because only a small number of feature points is required to estimate the
eleven parameters of each intermediate projection matrix. Moreover, in the case of
97

Figure 5.8: Outline of the codec with tracking at the decoder (3D-DVC-TD).
tracking at the encoder, statistics on tracks allow the encoder to select key frames
based on the video motion content, thus increasing bandwidth savings.
5.4.2 Tracking at the decoder
This codec, called 3D-DVC-TD, builds upon the 3D-DVC solution based on the
frame interpolation techniques presented in Section 5.3, and includes in addition
a Harris-Stephen feature-point detector [104] and a feature point encoder (see
Figure 5.8). The decoder receives these points and matches them to form tracks. It
starts by matching points between key frames using three constraints: the epipolar
geometry, motion smoothness with previously matched correspondences, and the
MSE. It then creates snakes [111] between key frames assuming a linear motion
and optimizes them to fit the set of received points. The optimization procedure
solves an LLS problem with equations similar to those of mesh fitting (5.10). To
make it more robust to outliers, points too far away from the snakes are ignored
and those close enough are given weights which decrease as the square of their
distance to the snakes.
The set of feature points is then transformed into a list Lt = {xt(i), yt(i)}, i =
1 . . .N , where N is the number of feature points considered (on average N = 176 in
98

Figure 5.9: Outline of the codec with tracking at the encoder (3D-DVC-TE).
the experiments reported in the chapter), by scanning the image column by column.
Due to the chosen scanning order, the horizontal component of the feature-point
coordinates varies slowly, so it is encoded using differential pulse code modulation
(DPCM) followed by arithmetic coding. On the other hand, the vertical component
varies rapidly and is encoded using fixed-length codes.
5.4.3 Tracking at the encoder
Similarly, this codec, called 3D-DVC-TE, extends the 3D-DVC solution presented
in Section 5.3 by adding the Harris-Stephen feature-point detector [104], a point
tracker and a point-track encoder, at the encoder (see Figure 5.9). Therefore,
unlike the two previous codecs, limited information is shared between the frames.
The encoder detects feature points on the current key frame and tracks them
in the following frames until one of the following two stopping criteria is met:
either the length of the longest track becomes large enough or the number of lost
tracks becomes too large. The former criterion enforces that key frames sufficiently
differ from one another, while the latter criterion ensures that the estimation of
intermediate projection matrices is always a well-posed problem. Once a stopping
criterion is met, a new key frame is transmitted and the process is reiterated.
99

Tracking relies on the minimization of sum of absolute differences (SAD) between
small blocks around point tracks. The minimization only considers integer pixel
locations and is biased toward small motions to avoid the uncertainty due to large
search regions. It begins by a spiral search around the location with null motion.
Once a small SAD is detected, it continues by following the path of least SAD,
until a local minimum is found. Tracks for which no small SAD can be found are
discarded.
For each tracked feature point of coordinate (i, j), a list Lx(i, j) = {xt, yt} of
its tracked position at the different instants t is formed. This list of coordinates is
then encoded using a DPCM followed by arithmetic coding.
5.5 Experimental Results
We have assessed the performance of the 3D-DVC incorporating the two interpo-
lation methods based on the SfM paradigm as well as the variants of this codec
augmented with the feature point tracking either at the encoder (3D-DVC-TE) or
at the decoder (3D-DVC-TD). These codecs were implemented by replacing the
frame interpolation of the 2D DVC codec [98] and adding point tracking. The key
frame frequency was estimated automatically in 3D-DVC-TE and set to one key
frame every 10 frames in 3D-DVC and 3D-DVC-TD.
Experimental results are presented on three sequences: street, stairway, and
statue. The first two, shown in Figure 5.3, are CIF at 30 Hz with 50 frames. The
third, shown in Figure 5.10, is CIF 25 Hz with 50 frames. These sequences contain
drastically different camera motions, as can be seen from the motion vectors and
the epipolar geometries. In the first one, the camera has a smooth motion, mostly
forward. In the second one, the camera has a lateral translational motion with
hand jitter, creating motions of up to 7 pixels between consecutive frames. In the
100

(a) Lossless key frames
(b) Quantized key frames (QP42)
Figure 5.10: Correspondences and epipolar geometry between the two first keyframes of the sequence statue. Feature points are represented by red dots, motionvectors by magenta lines ending at feature points, and epipolar lines by green linescentered at the feature points.
last one, the camera has a lateral rotational motion with hand jitter, which creates
a large occlusion area around the statue.
5.5.1 Frame interpolation without tracking (3D-DVC)
In DVC, the key frames are first quantized and encoded. It is thus essential
to assess the performance of the different techniques designed in this context.
Figure 5.10 shows that the 3D model estimation behaves well even with coarsely
quantized key frames. The motion vectors and the epipolar geometries at QP42
101

remain similar to those of lossless coding, the major difference lying in the density
of correspondences.
Figure 5.11 shows the PSNR of the interpolated frames obtained with the differ-
ent interpolation methods. The only introduction of the epipolar or 3D geometry
constraints in the interpolation process does not have a significant impact on the
PSNR of the interpolated frames. This can be explained by the fact that the result-
ing interpolated motion fields create misalignments between the side information
and WZ frames (see Figure 5.12). We will see in Section 5.5.4 that this translates
into poor RD performances of the 3D-DVC solution.
5.5.2 Frame interpolation with tracking at the encoder(3D-DVC-TE)
Figure 5.11 shows that 3D frame interpolation aided by point tracks consistently
outperforms both 3D frame interpolation without point tracks (3D-DVC) and clas-
sical 2D block matching (2D-DVC), bringing at times improvements of more than
10 dB. This results from the fact that misalignments between the side informa-
tion and WZ frames are greatly reduced by estimating the intermediate projection
matrices from actual tracks, instead of assuming linear track motions (see Fig-
ure 5.12). Table 5.1 summarizes the average PSNR of the different interpolation
methods. It shows that, when used jointly with the feature point tracking to
correct misalignments, the mesh-fitting interpolation method is superior to the
epipolar block-based method in both sequences, bringing average PSNR gains up
to 0.7 dB.
Tracking has two drawbacks: it introduces a bit-rate overhead and increases
the coder complexity. The bit-rate overhead represents less than 0.01 b/pixel.
Compared to classical 2D BBMC coders, the complexity overhead is very limited
due to the small number of tracks. Assuming 8 × 8 blocks for 2D BBMC, a CIF
102

5 10 15 20 25 30 35 40 45 5010
15
20
25
30
35
40
�������������� ��������������������������� ���������������������������������
������������������ ������������������������������������������������������ ������������������������������������
5 10 15 20 25 30 35 40 45 5010
15
20
25
30
35
40
Frames
Frames
��� ��!"�
Frames
��� ��!"�
��� ��!"�
5 10 15 20 25 30 35 40 45 5010
15
20
25
30
35
40
Figure 5.11: PSNR of interpolated frames using lossless key frames (from top tobottom: sequences street, stairway, and statue). Missing points correspond to keyframes (infinite PSNR).
103
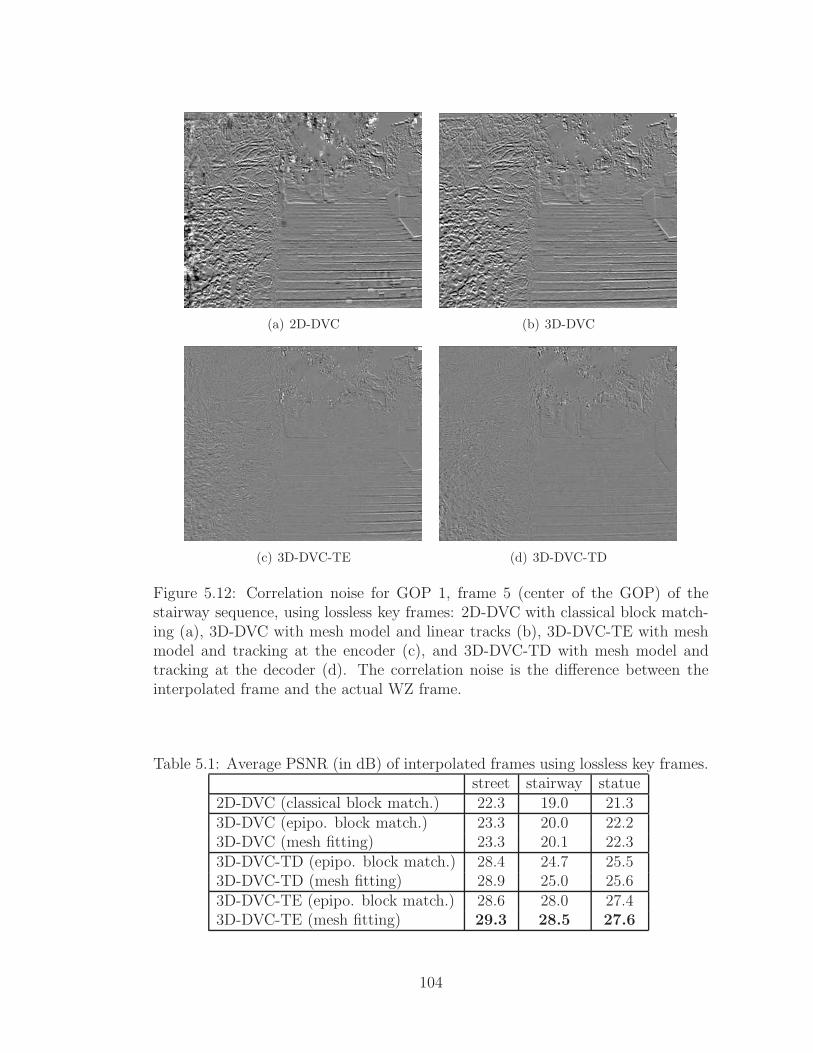
(a) 2D-DVC (b) 3D-DVC
(c) 3D-DVC-TE (d) 3D-DVC-TD
Figure 5.12: Correlation noise for GOP 1, frame 5 (center of the GOP) of thestairway sequence, using lossless key frames: 2D-DVC with classical block match-ing (a), 3D-DVC with mesh model and linear tracks (b), 3D-DVC-TE with meshmodel and tracking at the encoder (c), and 3D-DVC-TD with mesh model andtracking at the decoder (d). The correlation noise is the difference between theinterpolated frame and the actual WZ frame.
Table 5.1: Average PSNR (in dB) of interpolated frames using lossless key frames.street stairway statue
2D-DVC (classical block match.) 22.3 19.0 21.33D-DVC (epipo. block match.) 23.3 20.0 22.23D-DVC (mesh fitting) 23.3 20.1 22.33D-DVC-TD (epipo. block match.) 28.4 24.7 25.53D-DVC-TD (mesh fitting) 28.9 25.0 25.63D-DVC-TE (epipo. block match.) 28.6 28.0 27.43D-DVC-TE (mesh fitting) 29.3 28.5 27.6
104

5 10 15 20 25 30 35 40 45 5020
25
30
35
40
PS
NR
(dB
) ����
����
����
����
������� ��
Figure 5.13: PSNR of key frames and interpolated frames of the street sequenceusing 3D-DVC-TE with mesh fitting on lossy key frames. Peaks correspond to keyframes.
frame has (352/8)×(288/8) = 1584 blocks. On the other hand, the average number
of tracks is 128. Therefore, the complexity of the proposed tracking is only 8% of
a 2D BBMC.
Figure 5.13 shows the robustness of the proposed frame interpolation to quan-
tization noise, the quality of the interpolated frames degrading gracefully as the
bitrate is decreased. In the context of quantization, a larger quantization step size
decreases both the bitrate and the PSNR. However, it is not the case with frame in-
terpolation: a larger bitrate does not necessarily imply a larger PSNR. This figure
also shows that the PSNR of interpolated frames actually decreases more slowly
than that of key frames. Since quantization reduces the high-frequency content
of the key frames, it reduces the impact of interpolation misalignments. It also
reduces the impact of the low-pass effects of warping, both spatial and temporal.
The PSNR of interpolated frames has a ceiling value at about 30 dB. It is
quickly attained as the QP of key frames is decreased: this PSNR is about the
same whether key frames are losslessly encoded or quantized at QP = 26. In terms
of bitrate allocation, it means that in order to reach higher PSNR, more bits need
to be spent on parity bits.
Finally, although the objective quality strongly peaks at key frames, the sub-
jective quality is nearly constant, as shown in Figure 5.14. Both sources of errors,
105

(a) Frame 1 (PSNR: 36.5dB)
(b) Frame 5 (PSNR: 28.4dB)
Figure 5.14: Variation of the subjective quality at QP = 26 between a key frame(frame 1) and an interpolated frame (frame 5). In spite of a PSNR drop of 8.1 dB,both frames have a similar subjective quality.
misalignments and low-pass effects, are barely noticeable. This does not mean,
however, that they are not a limiting factor of the codec overall performances
because parity bits correct objective errors, not subjective ones.
5.5.3 Frame interpolation with tracking at the decoder(3D-DVC-TD)
Figures 5.11 and 5.12 show that point tracking at the decoder is also able to
greatly reduce misalignments and to consistently outperform 2D-DVC and 3D-
DVC. PSNR values obtained by 3D-DVC-TD are nearly constant inside each GOP
on the street sequence. The superiority of tracking at the encoder (3D-DVC-TE) is
in part due to the possibility of inserting new key frames and restarting tracking in
106

case of difficult motions. Like in the 3D-DVC-TE case, overheads are also limited.
An average of 176 feature points are detected at the encoder, which leads to a
bitrate overhead of 0.02 b/pixel. The complexity overhead is similar to the one of
intracoding.
5.5.4 Rate-distortion performances
Figure 5.15 compares the rate-distortion performances of the proposed mesh-based
codecs with version JM 9.5 of the H.264/AVC reference software and the 2D-DVC
software presented in [98]. The three proposed 3D codecs only differ from this
2D-DVC software by their side information generation. The 2D DVC software has
GOPs I-WZ-I, while H.264/AVC is tested in three modes: pure intra, inter-IPPP
with motion search, and IPPP with null motion vectors.
The 3D codecs with alignment (3D-DVC-TD and 3D-DVC-TE) strongly out-
perform the 3D codec without alignment (3D-DVC), confirming the need for precise
motion alignment. Compared to 2D-DVC, 3D-DVC-TE is superior over the whole
range of bitrates on all sequences while 3D-DVC-TD is superior on the street se-
quence over the whole range of bitrates, on the stairway sequence up to 990 kb/s
and on the statue sequence up to 740 kb/s. Note, however, that this RD gain
was achieved at the expense of the generality of the codec, 2D-DVC being able to
handle sequences with generic 2D motions.
Finally, compared to H.264/AVC, both 3D codecs with alignment outperform
intracoding and underperform intercoding with motion search. Since 3D-DVC-TE
benefits from limited interframe information at the encoder, it is also compared
to intercoding without motion search. The 3D codec is superior for bitrates up to
890 kb/s on the street sequence, over the whole range of bitrates on the stairway
sequence, and up to 1.4 Mb/s on the statue sequence.
107

0 0.5 1 1.520
22
24
26
28
30
32
34
36
Total rate (Mb/s)
PS
NR
(dB
)
0 0.5 1 1.520
22
24
26
28
30
32
34
36
Total rate (Mb/s)
�������������
���������
��������� ��������
���������
������
���������
���������
0 0.5 1 1.520
22
24
26
28
30
32
34
36
PS
NR
(dB
)
Total rate (Mb/s)
Figure 5.15: Rate-distortion curves for H.264/AVC intra, H.264/AVC inter-IPPPwith null motion vectors, H.264/AVC inter-IPPP, 2D-DVC I-WZ-I, and the threeproposed 3D codecs (top left: street, top right: stairway, bottom: statue).
108

5.6 Conclusion
In this chapter, we have explored the benefits of the SfM paradigm for distributed
coding of videos of static scenes captured by a moving camera. The SfM approach
allows introducing scene geometrical constraints in the side information generation
process. We have first developed two frame interpolation methods based either on
block matching along epipolar lines or 3D-mesh fitting. These techniques make use
of a robust feature-point matching algorithm leading to semidense correspondences
between pairs of consecutive key frames. The resulting interpolated motion fields
show a reduced number of outliers compared with motion fields obtained from 2D
block-based matching and interpolation techniques. It has been observed that this
property does not translate into significant side information PSNR gains, because
of misalignments problems betweens the side information and the Wyner-Ziv en-
coded frames. This limitation has been overcome by estimating the intermediate
projection matrices from point tracks obtained either at the encoder or at the
decoder, instead of interpolating it. It has led to major side information PSNR
improvements with only limited overheads, both in terms of bitrate and encoder
complexity. As an additional feature, point tracking at the encoder enables a rough
estimation of the video motion content, which is sufficient to select the key frames
adaptively. The RD performance of the resulting three DVC schemes has been
assessed against several techniques, showing the benefits of the 3D model based
interpolation methods augmented with feature point tracking for the type of ap-
plication and content considered. Further studies would be needed to extend the
proposed frame interpolation technique to videos with more generic motion fields
and to assess such methods against solutions in which limited motion search would
be considered at the encoder.
109

5.7 Acknowledgments
This work has been done in collaboration with Christine Guillemot and Luce
Morin, INRIA, Rennes, France. It has been partly funded by the European Com-
mission in the context of the network of excellence SIMILAR and of the IST-
Discover project. The author is thankful to the IST development team for its
original work on the IST-WZ codec [98] and the Discover software team for the
improvements they brought.
110

CHAPTER 6
CONCLUSION
In this dissertation, we have studied issues related to free-view 3D-video, and in
particular issues of 3D scene reconstruction, compression, and rendering. We have
presented four main contributions. First, we have presented a novel algorithm
which performs surface reconstruction from planar arrays of cameras and gener-
ates dense depth maps with multiple values per pixel. Second, we have introduced
a novel codec for the static depth-image-based representation, which jointly es-
timates and encodes the unknown depth map from multiple views using a novel
rate-distortion optimization scheme. Third, we have proposed a second novel codec
for the static depth-image-based representation, which relies on a shape-adaptive
wavelet transform and an explicit representation of the locations of major depth
edges to achieve major rate-distortion gains. Finally, we have proposed a novel al-
gorithm to extract the side information in the context of distributed video coding
of 3D scenes.
Several issues remain to be solved to obtain a telepresence system offering at
the same time realism, stereopsis, mobility, and interactivity. The efficient com-
pression of the depth maps with multiple values per pixels obtained in Chapter 2 is
still an open problem, which might be addressed by an extension of image-coding
techniques based on geometric wavelets [112]. Moreover, little is still known on
the generalization of 3D reconstruction and compression from static to dynamic
scenes. Finally, efficient approximations of the algorithms proposed here also need
to be designed to meet the constraints of real-time applications.
111

APPENDIX A
FIXING THE PROJECTIVEBASIS
During the nonlinear optimization of projection matrix P(1), the projective basis
is fixed by setting P(0) = [I 0] and choosing two points {X(1), X(2)} and their
projections. We would like to obtain a minimum parameterization of P(1). The
two points induce six constraints on P(1), four of which are independent. Each
point is associated with an equation of the form λ(1)x(1) = P(1)X. Using the third
component to solve for λ(1), we obtain x(1)P(1)3: X = P
(1)1: X and y(1)P
(1)3: X = P
(1)2: X.
These equations can be rewritten as AP(1)s = 0 where A is defined as
A ,
X⊺(1) 0 −x(1)(1)X(1)
0 X⊺(1) −y(1)(1)X(1)
X⊺(2) 0 −x(1)(2)X(2)
0 X⊺(2) −y(1)(2)X(2)
. (A.1)
Taking the SVD of A gives
A = U
S 0
0 0
V⊺
W⊺
, (A.2)
where S,V, and W are three matrices. Therefore, the projection matrices P(1)
can be parameterized by a vector r such that P(1)s =√
3Wr, where the factor√
3
was introduced so that a unit-norm vector r corresponds to ‖P(1)‖22 = 3.
112

APPENDIX B
BUNDLE ADJUSTMENT
The bundle adjustment problem given by Equation 5.5 is solved using an alternated
reweighted linear least square approach [103]. First, the denominators are factored
out and treated as constant weights, only updated at the end of each iteration.
These weights, denoted κ(1)(i), are defined as
κ(1)(i) ,
∣
∣
∣
[
λ(0)(i) x(0)⊺(i) 1]
P(1)s9:12
∣
∣
∣
−1
(B.1)
and initialized to 1. The problem then becomes biquadratic in its parameters:
min{λ(0)(i)},P(1)s
∑
i
κ2(i)(
(
[
λ(0)(i) x(0)⊺(i) 1]
(
x(1)(i)P(1)s9:12 −P
(1)s1:4
))2
+(
[
λ(0)(i) x(0)⊺(i) 1]
(
y(1)(i)P(1)s9:12 −P
(1)s5:8
))2 )
such that
P(1)s =√
3Wr
‖r‖22 = 1
(B.2)
which is solved by alternatively fixing either the projective depths {λ(0)} or the
camera parameters P(1)s and minimizing over the free parameters.
When the projective depths {λ(0)} are fixed, the problem is equivalent to finding
the unit-norm vector r that minimizes the squared norm of Ar, where matrix A is
113

obtained by stacking together sub-matrices of the form
√3κ
−λ(0)x(0)⊺ −1 0 0 x(1)λ(0)x(0)⊺ x(1)
0 0 −λ(0)x(0)⊺ −1 y(1)λ(0)x(0)⊺ y(1)
W. (B.3)
The solution is obtained by taking the SVD of matrix A and choosing the vector
associated with the smallest singular-value.
When the camera parameters P(1)s are fixed, the problem is unconstrained and
its Hessian is diagonal. Taking the derivative with regard to a particular {λ(0)}
and setting it to 0 leads to the solution
λ(0) = −a⊺b
a⊺awhere
a ,
x(1)P(1)s ⊺
9:11 −P(1)s ⊺
1:3
y(1)P(1)s ⊺
9:11 −P(1)s ⊺
5:7
x(0) ,
b ,
x(1)P(1)s12 −P
(1)s4
y(1)P(1)s12 −P
(1)s8
.
(B.4)
114

APPENDIX C
PUBLICATIONS
C.1 Journals
1. M. Maitre, Y. Shinagawa, and M. N. Do, “Joint estimation and encoding
of scalable depth-image-based representations for free-viewpoint rendering,”
IEEE Transactions on Image Processing, submitted for publication.
2. M. Maitre, C. Guillemot, and L. Morin, “3D model-based frame interpolation
for distributed video coding,” IEEE Transactions on Image Processing, vol.
16, pp. 1246-1257, 2007.
3. G. Guetat, M. Maitre, L. Joly, S.-L. Lai, T. Lee, and Y. Shinagawa, “Au-
tomatic 3-D grayscale volume matching and shape analysis,” IEEE Trans-
actions on Information Technology in Biomedicine, vol. 10, pp. 362-376,
2006.
C.2 Conferences
1. M. Maitre and M. N. Do, “Joint encoding of the depth image based represen-
tation using shape-adaptive wavelets,” in ICIP, submitted for publication.
2. M. Maitre, Y. Shinagawa, and M. N. Do, “Symmetric multi-view stereo re-
construction from planar camera arrays,” in CVPR, submitted for publica-
tion.
115

3. Y. Chen, M. Maitre, and F. Tong, “Transparent layer separation for dual
energy imaging,” in ICIP, submitted for publication.
4. M. Maitre, Y. Chen, and F. Tong, “High-dynamic-range compression using
a fast multiscale optimization,” in ICASSP, to appear.
5. M. Maitre, Y. Shinagawa, and M. N. Do, “Rate-distortion optimal depth
maps in the wavelet domain for free-viewpoint rendering,” in ICIP, 2007.
6. M. Maitre, C. Guillemot, and L. Morin, “3D scene modeling for distributed
video coding,” in ICIP, 2006.
C.3 Research Reports
1. Y. Chen, M. Maitre, and F. Tong, “High-dynamic-range compression us-
ing a fast mean-field gradient remapping with artifact correction,” Siemens
Corporate Research Tech. Rep., 2007.
2. M. Maitre, C. Guillemot, and L. Morin, “Reliable optical-flow estimation for
distributed video coding,” Irisa Res. Rep., 2007.
3. M. Maitre, V. Kindratenko, and Y. Shinagawa, “Laser-assisted 3D scene
reconstruction technique,” NCSA Tech. Rep., 2005.
4. M. Maitre, V. Kindratenko, and Y. Shinagawa, “Passive 3D scene recon-
struction technique,” NCSA Tech. Rep., 2005.
116

REFERENCES
[1] F. Herbert, Dune. Philadelphia, PA: Chilton Books, 1965.
[2] Jamiroquai, Travelling Without Moving. Sony, B000002BSG, 1997.
[3] J. Battelle, “HP’s HALO: Now this is telepresence,” May 2007. [Online].Available: http://battellemedia.com/archives/003632.php.
[4] “Wired travel guide: Second life,” 2006. [Online]. Available: http://www.wired.com/wired/archive/14.10/sloverview.html.
[5] M. Kanellos, “Philips: 3D-TV to appear in 2008,” 2006. [Online].Available: http://news.com.com/Philips+3D+TV+to+appear+in+2008/2100-1041 3-6022254.html.
[6] NVIDIA, “3D stereo,” NVIDIA, Santa Clara, CA, Technical Brief TB-00252-001 v02, 2003.
[7] T. Kanade, P. Rander, and P. Narayanan, “Virtualized reality: Constructingvirtual world from real scenes,” IEEE Multimedia, vol. 4, no. 1, pp. 34–46,1997.
[8] C. Zitnick, S. Kang, M. Uyttendaele, S. Winder, and R. Szeliski, “High-quality video view interpolation using a layered representation,” in Proc.SIGGRAPH, 2004, pp. 600–608.
[9] M. Magnor, P. Ramanathan, and B. Girod, “Multi-view coding for image-based rendering using 3-D scene geometry,” IEEE Trans. on Circuits andSys. for Video Tech., vol. 13, no. 11, pp. 1092–1106, 2003.
[10] A. Smolic and P. Kauff, “Interactive 3-D video representation and coding,”Proc. of the IEEE, vol. 93, no. 1, pp. 98–110, 2005.
[11] E. Adelson and J. Bergen, “The plenoptic function and the elements of earlyvision,” in Computational Models of Visual Processing, M. S. Landy andJ. A. Movshon, Eds. Cambridge, MA: MIT Press, 1991, pp. 3–20.
[12] D. A. Forsyth and J. Ponce, Computer Vision: A Modern Approach.Lebanon, IN: Prentice Hall, 2002.
117
[13] B. K. P. Horn, Robot Vision. Cambridge, MA: MIT Press, 1986.
[14] R. Hartley and A. Zisserman, Multiple View Geometry in Computer Vision.Cambridge, UK: Cambridge University Press, 2000.
[15] O. Faugeras and Q.-T. Luong, The Geometry of Multiple Images.Cambridge, MA: MIT Press, 2001.
[16] Y. Ma, S. Soatto, J. Kosecka, and S. Sastry, An invitation to 3D vision.New York, NY: Springer-Verlag, 2004.
[17] T. Cover and J. Thomas, Elements of Information Theory. Hoboken, NJ:John Wiley and Sons Ltd., 1991.
[18] Mallat, A Wavelet Tour of Signal Processing. Burlington, MA: AcademicPress, 1999.
[19] D. Taubman and M. Marcellin, JPEG2000: Image Compression Fundamen-tals, Standards and Practice. New York, NY: Springer-Verlag, 2001.
[20] Y. Q. Shi and H. Sun, Image and Video Compression for Multimedia Engi-neering. Boca Raton, FL: CRC Press, 1999.
[21] V. Bhaskaran and K. Konstantinides., Image and Video Compression Stan-dards: Algorithms and Architectures. Boston, MA: Kluwer Academic Pub-lishers, 1997.
[22] M. Pharr and G. Humphreys, Physically Based Rendering: From Theory toImplementation. San Fransisco, CA: Morgan Kaufmann, 2004.
[23] G. Wolberg, Digital Image Warping. Piscataway, NJ: IEEE Press, 1994.
[24] H.-Y. Shum, S.-C. Chan, and S. B. Kang, Image-Based Rendering. NewYork, NY: Springer-Verlag, 2007.
[25] D. Scharstein and R. Szeliski, “A taxonomy and evaluation of densetwo-frame stereo correspondence algorithms,” Int. J. of Comp. Vis., vol. 47,no. 1–3, pp. 7–42, 2002.
[26] J. W. Shade, S. J. Gortler, L.-W. He, and R. Szeliski, “Layered depthimages,” in Proc. SIGGRAPH, 1998, pp. 231–242.
[27] X. Gu, S. J. Gortler, and H. Hoppe, “Geometry images,” in Proc. SIG-GRAPH, 2002, pp. 355–361.
[28] S. Seitz, B. Curless, J. Diebel, D. Scharstein, and R. Szeliski, “A compari-son and evaluation of multi-view stereo reconstruction algorithms,” in Proc.CVPR, 2006, pp. 519–528.
118

[29] G. Vogiatzis, C. C. H. Esteban, P. H. S. Torr, and R. Cipolla, “Multiviewstereo via volumetric graph-cuts and occlusion robust photo-consistency,”IEEE Trans. on PAMI, vol. 29, pp. 2241–2246, 2007.
[30] J. Sun, Y. Li, S. Kang, and H. Shum, “Symmetric stereo matching for oc-clusion handling,” in Proc. CVPR, 2005, pp. 399–406.
[31] Y. Deng, Q. Yang, X. Lin, and X. Tang, “Stereo correspondence with occlu-sion handling in a symmetric patch-based graph-cuts model,” IEEE Trans.on PAMI, vol. 29, pp. 1068–1079, 2007.
[32] R. I. Hartley, “Theory and practice of projective rectification,” Int. J. ofComp. Vis., vol. 35, pp. 115–127, 1999.
[33] A. Fusiello, E. Trucco, and A. Verri, “A compact algorithm for rectificationof stereo pairs,” Machine Vis. and Appli., vol. 12, pp. 16–22, 2000.
[34] N. Ayache and F. Lustman, “Trinocular stereovision for robotics,” IEEETrans. on PAMI, vol. 13, pp. 73–85, 1991.
[35] C. Sun, “Uncalibrated three-view image rectification,” Im. and Vis. Comp.,vol. 21, no. 3, pp. 259–269, 2003.
[36] Y. Wei and L. Quan, “Asymmetrical occlusion handling using graph cut formulti-view stereo,” in Proc. CVPR, 2005, pp. 902–909.
[37] S. B. Kang, R. Szeliski, and J. Chai, “Handling occlusions in dense multi-view stereo,” in Proc. CVPR, 2001, pp. 103–110.
[38] M.-A. Drouin, M. Trudeau, and S. Roy, “Geo-consistency for wide multi-camera stereo,” in Proc. CVPR, 2005, pp. 351–358.
[39] M. Goesele, B. Curless, and S. M. Seitz, “Multi-view stereo revisited,” inProc. CVPR, 2006, pp. 2402–2409.
[40] P. Gargallo and P. Sturm, “Bayesian 3D modeling from images using multipledepth maps,” in Proc. CVPR, 2005, pp. 885–891.
[41] C. L. Zitnick and S. B. Kang, “Stereo for image-based rendering using imageover-segmentation,” Int. J. of Comp. Vis., vol. 75, pp. 49–65, 2007.
[42] M. Jaesik, M. Powell, and K. W. Bowyer, “Automated performance evalu-ation of range image segmentation algorithms,” IEEE Trans. on Sys., Manand Cyber., vol. 34, pp. 263–271, 2004.
[43] H.-Y. Shum, J. Sun, S. Yamazaki, Y. Li, and C.-K. Tang, “Pop-up light field:An interactive image-based modeling and rendering system,” ACM Trans.on Graphics, vol. 23, pp. 143–162, 2004.
119

[44] C. Zhang and T. Chen, “View-dependent non-uniform sampling for image-based rendering,” in Proc. ICIP, 2004, pp. 2471–2474.
[45] L. Vincent and P. Soille, “Watersheds in digital spaces: An efficient algorithmbased on immersion simulations,” IEEE Trans. on PAMI, vol. 13, pp. 583–598, 1991.
[46] V. Kolmogorov and R. Zabih, “Multi-camera scene reconstruction via graphcuts,” in Proc. ECCV, 2002, pp. 8–40.
[47] C. Fehn, R. Barre, and R. S. Pastoor, “Interactive 3-D TV – concepts andkey technologies,” Proc. of the IEEE, vol. 94, no. 3, pp. 524–538, 2006.
[48] W. Matusik and H. Pfister, “3D-TV: A scalable system for real-time ac-quisition, transmission, and autostereoscopic display,” in Proc. SIGGRAPH,2004, pp. 814–824.
[49] H.-Y. Shum, S. B. Kang, and S.-C. Chan, “Survey of image-based represen-tations and compression techniques,” IEEE Trans. on Circuits and Sys. forVideo Tech., vol. 13, pp. 1020–1037, 2003.
[50] S.-C. Chan, K.-T. Ng, Z.-F. Gan, K.-L. Chan, and H.-Y. Shum, “The plenop-tic video,” IEEE Trans. on Circuits and Sys. for Video Tech., vol. 15, no. 12,pp. 1650–1659, 2005.
[51] L. Levkovich-Maslyuk, A. Ignatenko, A. Zhirkov, A. Konushin, I. K. Park,M. Han, and Y. Bayakovski, “Depth image-based representation and com-pression for static and animated 3-D objects,” IEEE Trans. on Circuits andSys. for Video Tech., vol. 14, pp. 1032–1045, 2004.
[52] J. Oh, Y.-S. Choi, R.-H. Park, J. Kim, T. Kim, and H. Jung, “Trinocularstereo sequence coding based on MPEG-2,” IEEE Trans. on Circuits andSys. for Video Tech., vol. 15, no. 3, pp. 425–429, 2005.
[53] R.-S. Wang and Y. Wang, “Multiview video sequence analysis, compression,and virtual viewpoint synthesis,” IEEE Trans. on Circuits and Sys. for VideoTech., vol. 10, pp. 397–410, 2000.
[54] R. Balter, P. Gioia, and L. Morin, “Scalable and efficient coding using 3Dmodeling,” IEEE Trans. on Multimedia, vol. 8, pp. 1147–1155, 2006.
[55] A. Ortega and K. Ramchandran, “Rate distortion methods in image andvideo compression,” IEEE Signal Proc. Mag., vol. 15, pp. 23–50, 1998.
[56] P. Ramanathan and B. Girod, “Rate-distortion analysis for light field codingand streaming,” EURASIP Sig. Proc.: Im. Com., vol. 21, pp. 462–475, 2006.
120

[57] J. Park and H. Park, “A mesh-based disparity representation method forview interpolation and stereo image compression,” IEEE Trans. on Im.Proc., vol. 15, pp. 1751–1762, 2006.
[58] D. P. Bertsekas, Dynamic Programming and Optimal Control. Nashua,NH: Athena Scientific, 2005.
[59] D. Tzovaras and M. G. Strintzis, “Motion and disparity field estimation usingrate-distortion optimization,” IEEE Trans. on Circuits and Sys. for VideoTech., vol. 8, pp. 171–180, 1998.
[60] J. Ellinas and M. Sangriotis, “Stereo video coding based on quad-tree decom-position of B-P frames by motion and disparity interpolation,” IEE Proc.-Vis. Im. Sig. Proc., vol. 152, no. 5, pp. 639–647, 2005.
[61] G. J. Sullivan and R. L. Baker, “Efficient quadtree coding of images andvideo,” IEEE Trans. on Im. Proc., vol. 3, pp. 327–331, 1994.
[62] G. Sullivan and T. Wiegand, “Video compression - from concepts to theH.264/AVC standard,” Proc. of the IEEE, vol. 93, pp. 18–31, 2005.
[63] Y. Yang and S. S. Hemami, “Generalized rate-distortion optimization formotion-compensated video coders,” IEEE Trans. on Circuits and Sys. forVideo Tech., vol. 10, pp. 942–955, 2000.
[64] G. M. Schuster and A. K. Katsaggelos, “An optimal quadtree-based motionestimation and motion-compensated interpolation scheme for video compres-sion,” IEEE Trans. on Im. Proc., vol. 7, pp. 1505–1523, 1998.
[65] M. Woo, J. Neider, T. Davis, and D. Shreiner, OpenGL Programming Guide.Lebanon, IN: Addison Wesley, 1999.
[66] W. Press, B. Flannery, S. Teukolsky, and W. Vetterling, Numerical Recipesin C : The Art of Scientific Computing. Cambridge, UK: CambridgeUniversity Press, 1993.
[67] G. Sullivan and T. Wiegand, “Rate-distortion optimization for video com-pression,” IEEE Signal Proc. Mag., pp. 74–90, 1998.
[68] D. Luenberger, Linear and Nonlinear Programming. Boston, MA: KluwerAcademic Publishers, 2003.
[69] P. J. Burt and E. H. Adelson, “The Laplacian pyramid as a compact imagecode,” IEEE Trans. on Com., vol. COM-31, no. 4, pp. 532–540, 1983.
[70] F. R. Kschischang, B. J. Frey, and H.-A. Loeliger, “Factor graphs and thesum-product algorithm,” IEEE Trans. on Info. Theory, vol. 47, pp. 498–519,2001.
121

[71] P. Felzenszwalb and D. Huttenlocher, “Efficient belief propagation for earlyvision,” in Proc. CVPR, 2004, pp. 41–54.
[72] J. D. Oh and R.-H. Park, “Reconstruction of intermediate views from stereo-scopic images using disparity vectors estimated by the geometrical con-straint,” IEEE Trans. on Circuits and Sys. for Video Tech., vol. 16, pp.638–641, 2006.
[73] J. E. Fowler, “QccPack: An open-source software library for quantization,compression, and coding,” in Proc. of SPIE Appli. of Digital Im. Proc., 2000,pp. 294–301.
[74] Y. Morvan, D. Farin, and P. H. N. de With, “Depth-image compressionbased on an R-D optimized quadtree decomposition for the transmission ofmultiview images,” in Proc. ICIP, 2007, pp. 105–108.
[75] S. Li and W. Li, “Shape-adaptive discrete wavelet transforms for arbitrarilyshaped visual object coding,” IEEE Trans. on Circuits and Sys. for VideoTech., vol. 10, pp. 725–743, 2000.
[76] Y. K. Liu and B. Zalik, “An efficient chain code with Huffman coding,”Pattern Recog., vol. 38, pp. 553–557, 2005.
[77] M. Maitre, Y. Shinagawa, and M. N. Do, “Wavelet-based joint estimation andencoding of depth-image-based representations for free-viewpoint rendering,”IEEE Trans. on Im. Proc., submitted for publication.
[78] J. Slepian and J. Wolf, “Noiseless coding of correlated information sources,”IEEE Trans. on Info. Theory, vol. 19, no. 4, pp. 471–480, 1973.
[79] A. Wyner and J. Ziv, “The rate-distortion function for source coding withside information at the decoder,” IEEE Trans. on Info. Theory, vol. 22, no. 1,pp. 1–10, January 1976.
[80] S. Pradhan and K. Ramchandran, “Distributed source coding using syn-dromes (DISCUS): Design and construction,” IEEE Trans. on Info. Theory,vol. 49, no. 3, pp. 626–643, March 2003.
[81] A. Aaron and B. Girod, “Compression with side information using turbocodes,” in Proc. IEEE Int. Data Compression Conf., 2002, pp. 252–261.
[82] J. Garcia-Frias and Y. Zhao, “Compression of correlated binary sources usingturbo codes,” IEEE Comm. Letters, vol. 5, pp. 417–419, 2001.
[83] J. Garcia-Frias and Y. Zhao, “Data compression of unknown single and cor-related binary sources using punctured turbo codes,” in Proc. Allerton Conf.on Com., Contr. and Comput., 2001.
122
[84] J. Bajcsy and P. Mitran, “Coding for the Slepian-Wolf problem with turbocodes,” in Proc. IEEE Int. Global Com. Conf., 2001, pp. 1400–1404.
[85] A. D. Liveris, Z. Xiong, and C. N. Georghiades, “Compression of binarysources with side information at the decoder using LDPC codes,” IEEEComm. Letters, vol. 6, pp. 440–442, 2002.
[86] T. Tian, J. Garcia-Frias, and W. Zhong, “Compression of correlated sourcesusing LDPC codes,” in Proc. IEEE Int. Data Compression Conf., 2003, p.450.
[87] A. Aaron, R. Zhang, and B. Girod, “Wyner-Ziv coding of motion video,” inProc. Asilomar Conf. on Sig., Sys. and Comp., 2002, pp. 240–244.
[88] A. Aaron, S. Rane, R. Zhang, and B. Girod, “Wyner-Ziv coding for video:Applications to compression and error resilience,” in Proc. IEEE Int. DataCompression Conf., 2003, pp. 93–102.
[89] A. Aaron, S. Rane, E. Setton, and B. Girod, “Transform-domain Wyner-Zivcodec for video,” in Proc. SPIE Conf. on Visual Com. and Im. Proc., 2004,pp. 520–528.
[90] R. Puri and K. Ramchandran, “PRISM: A new robust video coding archi-tecture based on distributed compression principles,” in Proc. Allerton Conf.on Com., Contr. and Comput., 2002.
[91] R. Puri and K. Ramchandran, “PRISM: A new reversed multimedia codingparadigm,” in Proc. ICIP, 2003, pp. 617–620.
[92] R. Puri, A. Majumbar, P. Ishwar, and K. Ramchandran, “Distributed videocoding in wireless sensor networks,” Signal Proc., vol. 23, pp. 94–106, 2006.
[93] B. Girod, A. Aaron, S. Rane, and D. Rebollo-Monedero, “Distributed videocoding,” Proc. of the IEEE, vol. 93, no. 1, pp. 71–83, January 2005.
[94] P. Ishwar, V. Prabhakaran, and K. Ramchandran, “Towards a theory forvideo coding using distributed compression principles,” in Proc. ICIP, 2003,pp. 687–690.
[95] J. Repko and M. Pollefeys, “3D models from extended uncalibrated videosequences: Addressing key-frame selection and projective drift,” in Proc.3-D Digit. Imag. and Model., 2005, pp. 150–157.
[96] F. Galpin and L. Morin, “Sliding adjustment for 3D video representation,”EURASIP J. on Applied Signal Proc., vol. 2002, no. 10, pp. 1088–1101, 2002.
[97] J. Ascenso, C. Brites, and F. Pereira, “Content adaptive Wyner-Ziv videocoding driven by motion activity,” in Proc. ICIP, 2006, pp. 605–608.
123

[98] J. Ascenso, C. Brites, and F. Pereira, “Improving frame interpolation withspatial motion smoothing for pixel domain distributed video coding,” inEURASIP Conf. on Speech and Im. Proc., Multim. Com. and Serv., 2005.
[99] P. Torr and A. Zisserman, “Robust computation and parametrization ofmultiple view relations,” in Proc. ICCV, 1998, pp. 727–732.
[100] O. Chum, J. Matas, and J. Kittler, “Locally optimized RANSAC,” in Proc.of the 25th DAGM Symp., 2003, pp. 236–243.
[101] P. A. Beardsley, A. Zisserman, and D. W. Murray, “Sequential updating ofprojective and affine structure from motion,” Int. J. of Comp. Vis., vol. 23,pp. 235–259, 1997.
[102] B. Matei and P. Meer, “A general method for errors-in-variables problems incomputer vision,” in Proc. CVPR, 2000, pp. 18–25.
[103] A. Bartoli, “A unified framework for quasi-linear bundle adjustment,” inProc. ICPR, 2002, pp. 560–563.
[104] C. Harris and M. Stephens, “A combined corner and edge detector,” in Proc.Alvey Vision Conf., 1988, pp. 147–151.
[105] R. Duda, P. Hart, and D. Strok, Pattern Classification. Hoboken, NJ: JohnWiley and Sons Ltd., 2001.
[106] S. Birchfield and C. Tomasi, “Depth discontinuities by pixel-to-pixel stereo,”Int. J. of Comp. Vis., vol. 35, pp. 269–293, 1999.
[107] M. Berg, M. Kreveld, M. Overmars, and O. Schwarzkopf, ComputationalGeometry: Algorithms and Applications. New York, NY: Springer-Verlag,2000.
[108] R. Hartley, “Chirality,” Int. J. of Comp. Vis., vol. 26, no. 1, pp. 41–61, 1998.
[109] R. Hartley, “Lines and points in three views and the trifocal tensor,” Int. J.of Comp. Vis., vol. 22, no. 2, pp. 125–140, 1997.
[110] S. Boyd and L. Vandenberghe, Convex Optimization. Cambridge, UK:Cambridge University Press, 2004.
[111] C. Xu and J. L. Prince, “Snakes, shapes, and gradient vector flow,” IEEETrans. on Im. Proc., vol. 7, pp. 359–369, 1998.
[112] G. Peyre and S. Mallat, “Surface compression with geometric bandelets,” inProc. SIGGRAPH, 2005, pp. 601–608.
124

AUTHOR’S BIOGRAPHY
Matthieu Maitre is a Ph.D. candidate at the Department of Electrical and Com-
puter Engineering, University of Illinois at Urbana-Champaign (UIUC). He re-
ceived in 2002 his diplome d’ingenieur from the Ecole Nationale Superieure de
Telecommunications (ENST) and his M.S. from the UIUC. His research interests
include computer vision, image analysis, stereovision, and video compression.
125






![[0] maitre exclave](https://static.fdocuments.net/doc/165x107/555bf7c6d8b42a56448b4be2/0-maitre-exclave.jpg)











