
2003-12-PS.ppt
26
A Framework for Multi-agent A Framework for Multi-agent Discrete Event Simulation: V-Lab® Discrete Event Simulation: V-Lab® Prasanna Sridhar Shahab Sheikh-Bahaei 12/05/2003 Autonomous Control Engineering University of New Mexico This work was supported by NASA AMES under grant NAG 2-1547
-
Upload
debjyoti-sarkar -
Category
Documents
-
view
212 -
download
0
Transcript of 2003-12-PS.ppt

A Framework for Multi-agent A Framework for Multi-agent Discrete Event Simulation: V-Lab®Discrete Event Simulation: V-Lab®
Prasanna SridharShahab Sheikh-Bahaei
12/05/2003Autonomous Control Engineering
University of New Mexico
This work was supported by NASA AMES under grant NAG 2-1547
V-Lab®
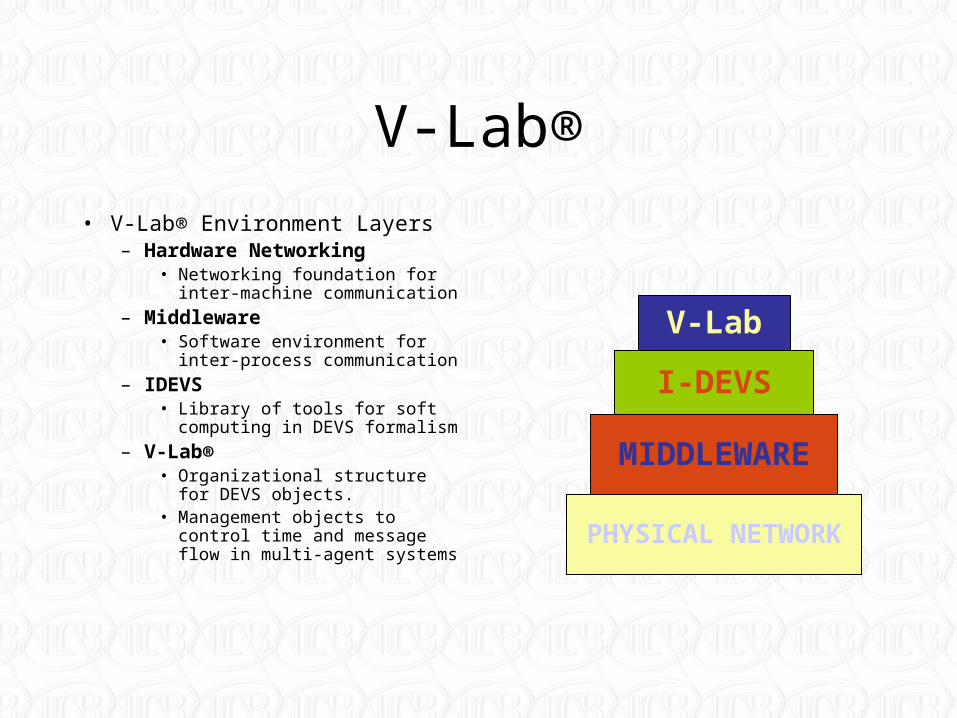
• V-Lab® Environment Layers– Hardware Networking
• Networking foundation for inter-machine communication
– Middleware• Software environment for inter-
process communication
– IDEVS• Library of tools for soft
computing in DEVS formalism
– V-Lab®• Organizational structure for
DEVS objects. • Management objects to control
time and message flow in multi-agent systems
PHYSICAL NETWORK
MIDDLEWARE
I-DEVS
V-Lab
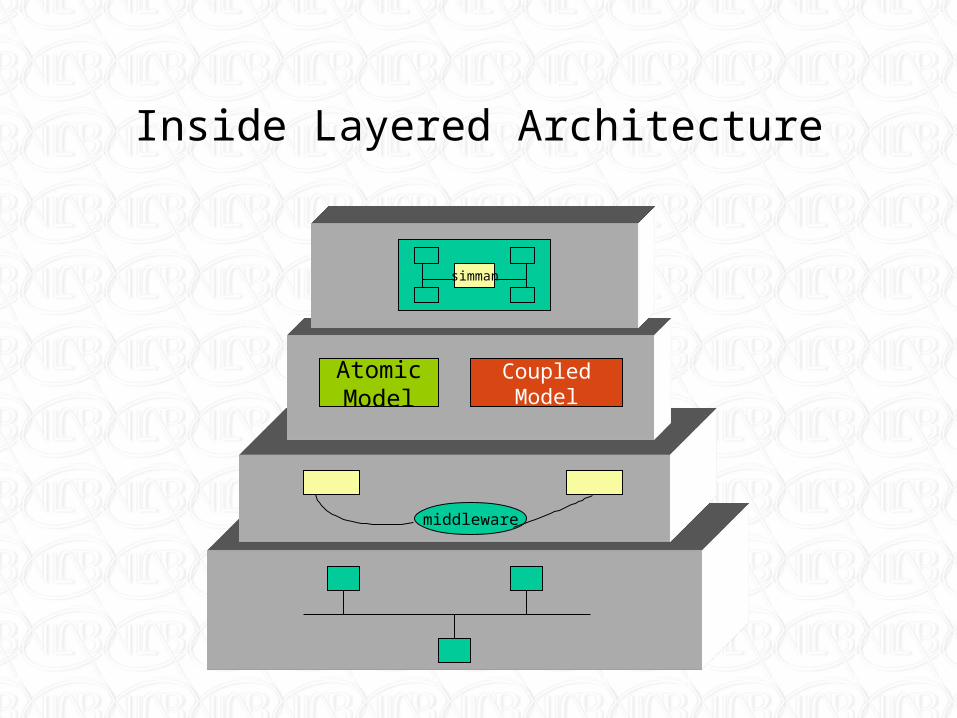
Inside Layered Architecture
middleware
AtomicModel
CoupledModel
simman
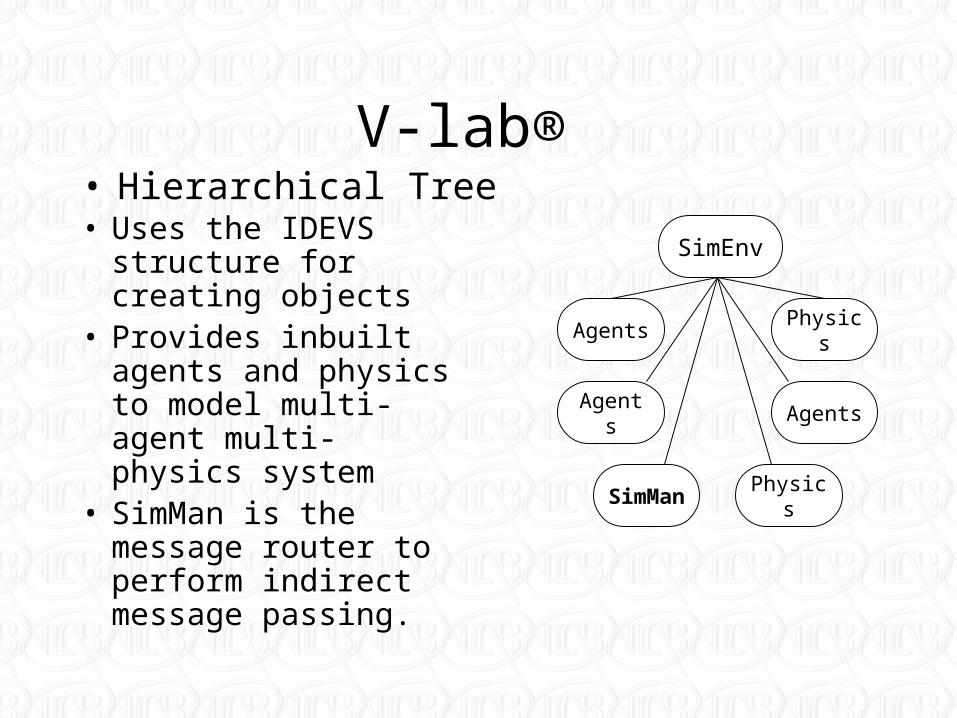
V-lab®
• Uses the IDEVS structure for creating objects
• Provides inbuilt agents and physics to model multi-agent multi-physics system
• SimMan is the message router to perform indirect message passing.
• Hierarchical Tree
SimEnv
Agents
Agents
Physics
Agents
SimMan Physics
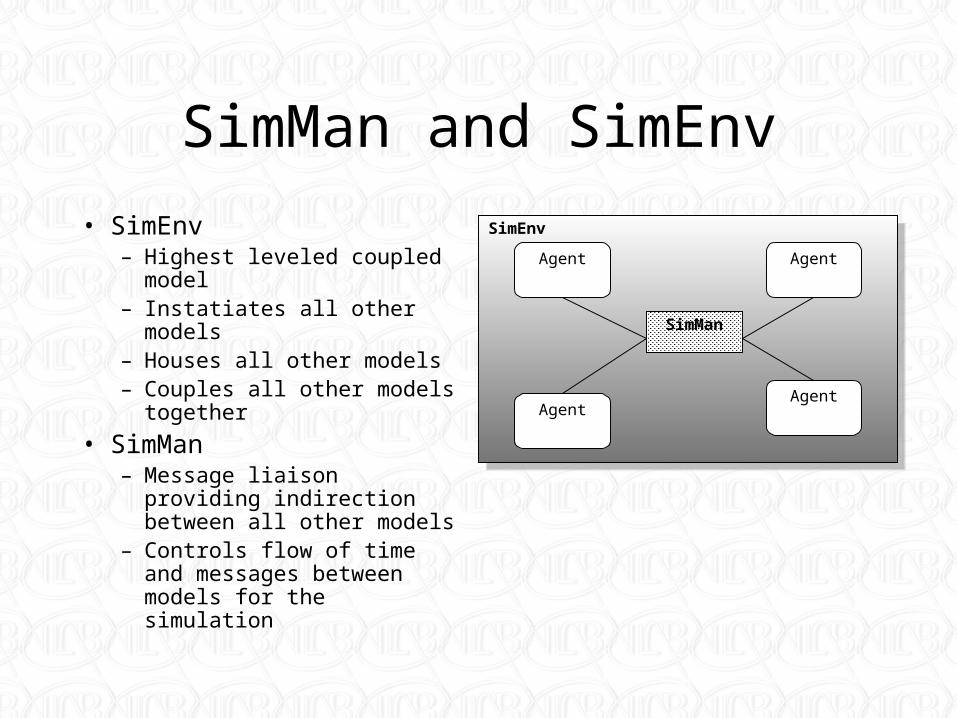
SimMan and SimEnv
• SimEnv– Highest leveled coupled
model– Instatiates all other models– Houses all other models– Couples all other models
together
• SimMan– Message liaison providing
indirection between all other models
– Controls flow of time and messages between models for the simulation
SimEnvSimEnv
SimMan
Agent
Agent
Agent
Agent
Parsing
• A grammar defines rules for building syntactically correct programs.
• One way of defining grammar is through BNF (Backus-Naur Form)
• BNF of our simulation configurations is translated JavaCC format and saved as file parseConfig.jj
• When parseConfig.jj is compiled by JavaCC, it generates a Java file parseConfig.java. Parsing can be done by instatiating an object of parseConfig.java
Sample Config file
robo2 = Robot.Robot; //agent
robo3 = Robot.Robot; //agent
robo4 = Robot.Robot; //agent
robo5 = Robot.Robot; //agent
robo6 = Robot.Robot; //agent
robo7 = Robot.Robot; //agent
terr = Robot.Terrain;
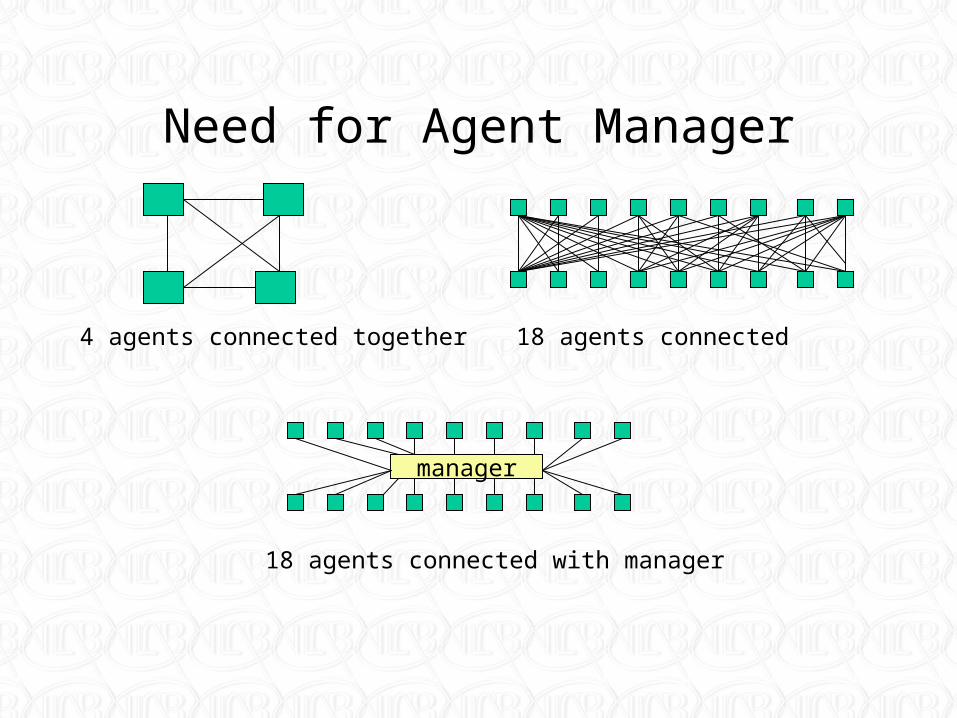
Need for Agent Manager
4 agents connected together 18 agents connected
18 agents connected with manager
manager
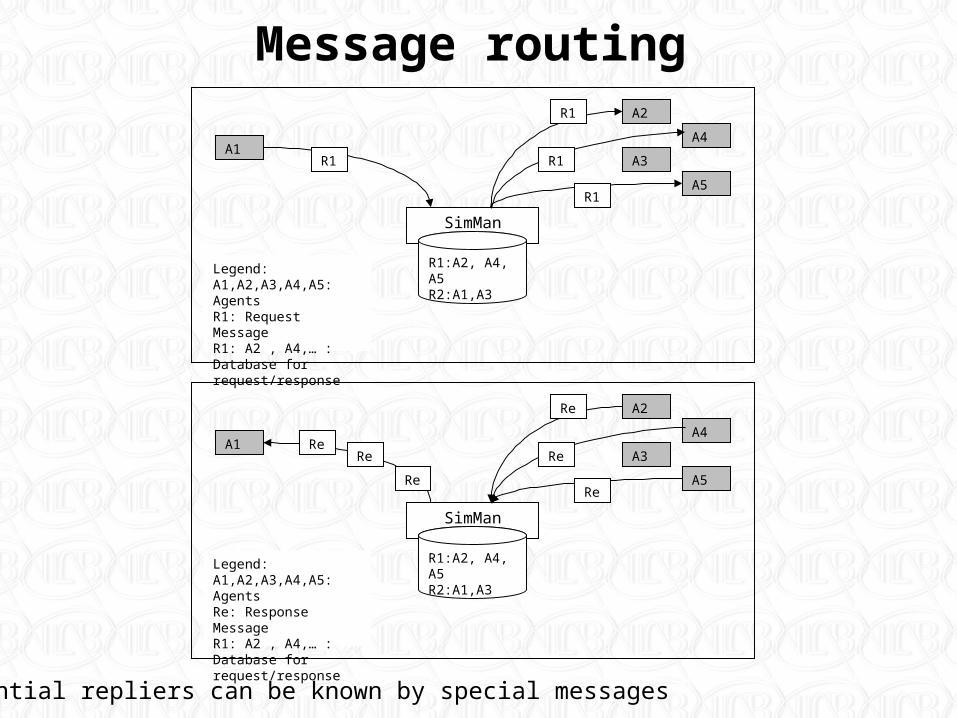
Message routing
A1
SimMan
R1
A2
A3
A4
A5
R1:A2, A4, A5R2:A1,A3
R1
R1
R1
Legend:A1,A2,A3,A4,A5: AgentsR1: Request MessageR1: A2 , A4,… : Database for request/response
A1
SimMan
Re
A2
A3
A4
A5
R1:A2, A4, A5R2:A1,A3
Re
Re
Re
Legend:A1,A2,A3,A4,A5: AgentsRe: Response MessageR1: A2 , A4,… : Database for request/response
Re
Re
Potential repliers can be known by special messages
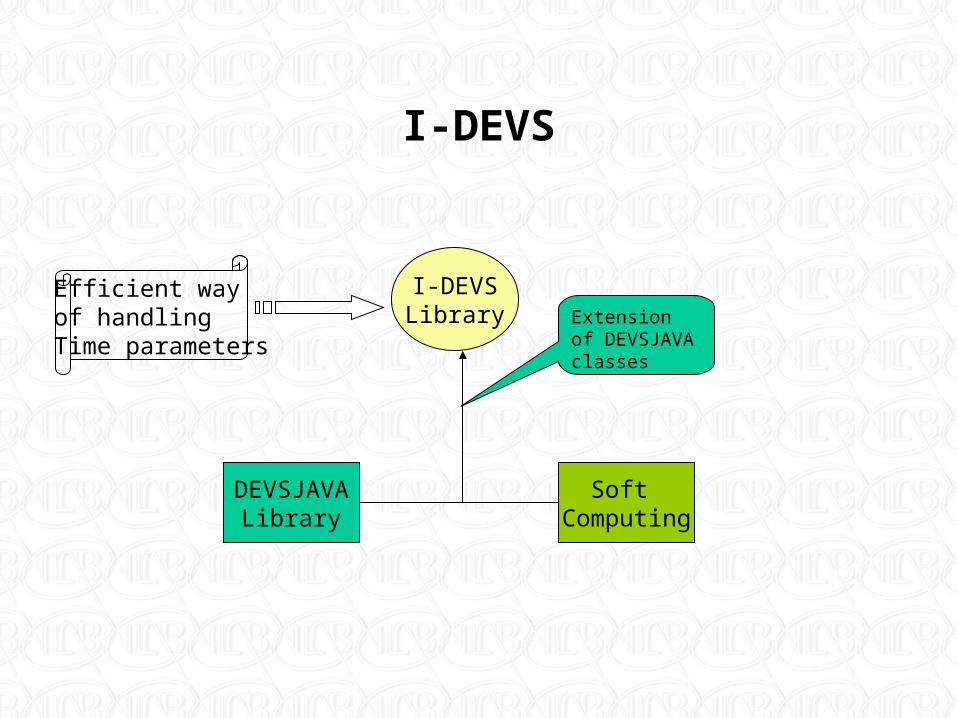
I-DEVS
DEVSJAVALibrary
Soft Computing
I-DEVSLibrary Extension
of DEVSJAVAclasses
Efficient wayof handlingTime parameters

Simulation Results
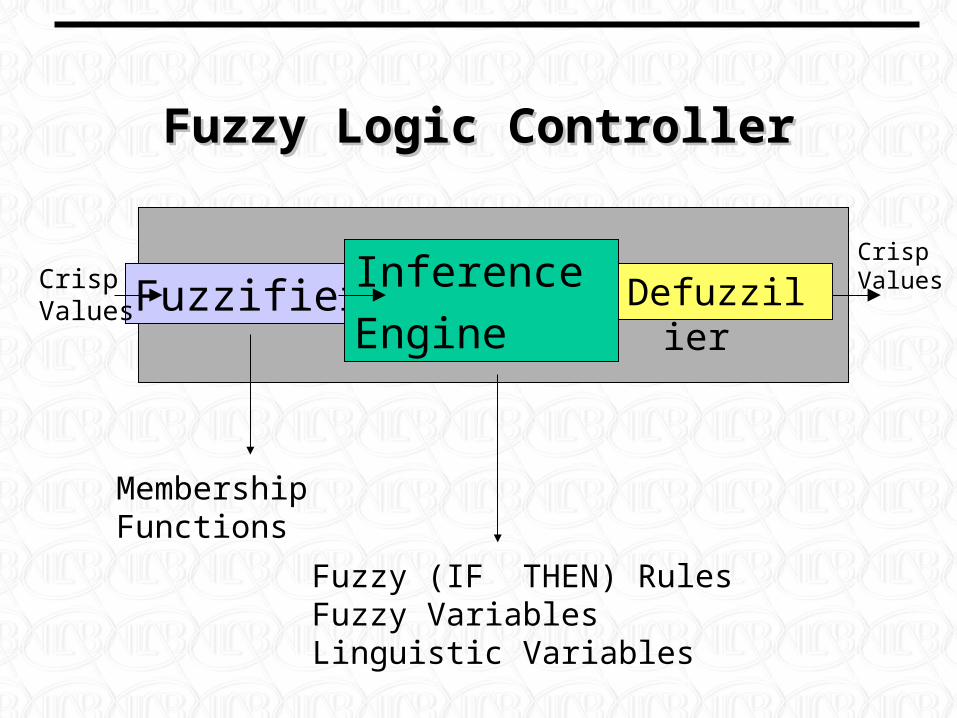
Fuzzy Logic ControllerFuzzy Logic Controller
DefuzzilierFuzzifierInference
Engine
Membership Functions
Fuzzy (IF THEN) RulesFuzzy VariablesLinguistic Variables
CrispValues
CrispValues
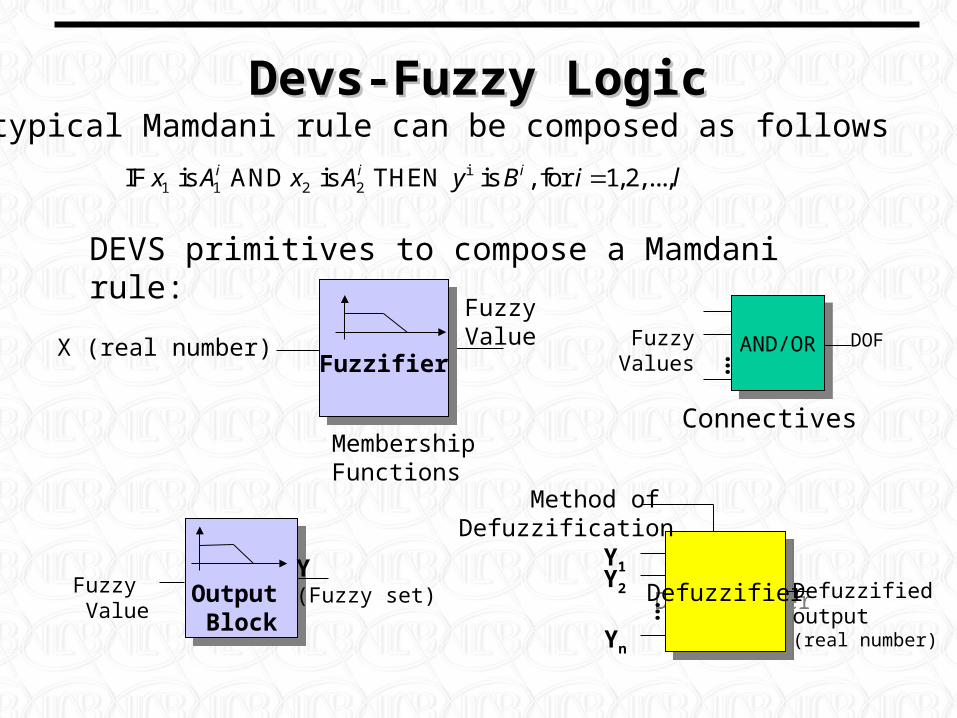
Devs-Fuzzy LogicDevs-Fuzzy Logic
DEVS primitives to compose a Mamdani rule:
Membership Functions
A typical Mamdani rule can be composed as follows i
1 1 2 2IF is AND is THEN is , for 1,2,...,i i ix A x A y B i l
X (real number)
Fuzzy Value
FuzzifierFuzzifier
Output Block
Output Block
Fuzzy Value
Y (Fuzzy set)
…
AND/ORAND/ORFuzzyValues
DOF
DefuzzifierDefuzzifier
Y1Y2
Yn…
Method of Defuzzification
Defuzzified output (real number)
Connectives
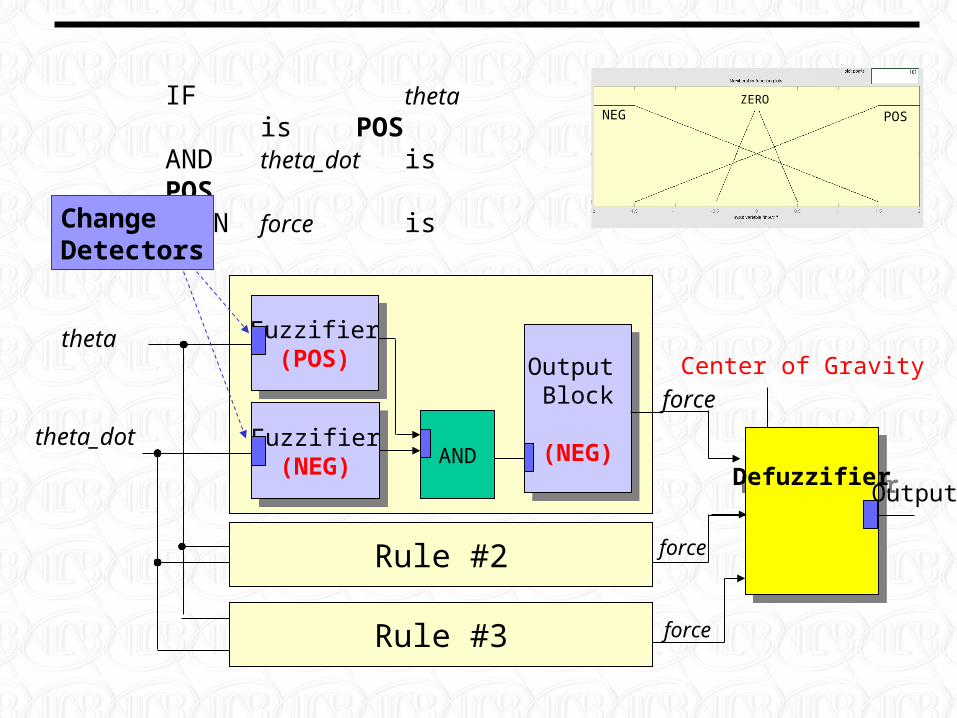
IF theta is POS AND theta_dot is POS THEN force is NEG
NEGZERO
POS
Fuzzifier(POS)
Fuzzifier(POS)
AND
DefuzzifierDefuzzifier
theta
theta_dot Fuzzifier(NEG)
Fuzzifier(NEG)
forceOutput Block
(NEG)
Output Block
(NEG)
Center of Gravity
Rule #2
Rule #3
force
force
Output
Change Detectors
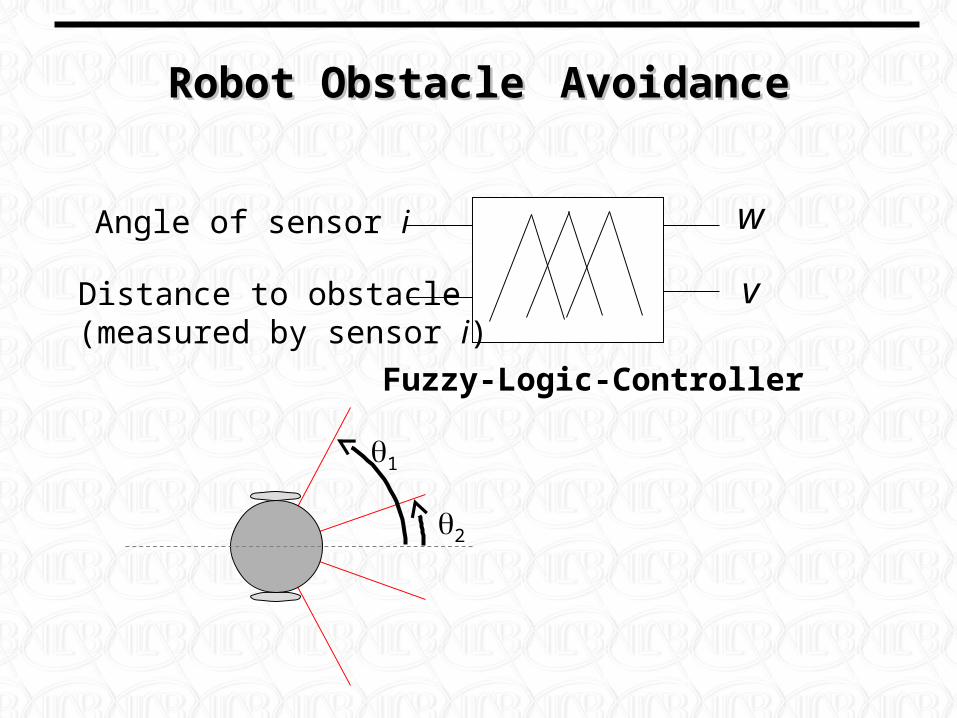
Robot ObstacleRobot Obstacle AvoidanceAvoidance
Distance to obstacle (measured by sensor i)
Angle of sensor i w
v
Fuzzy-Logic-Controller
2
1
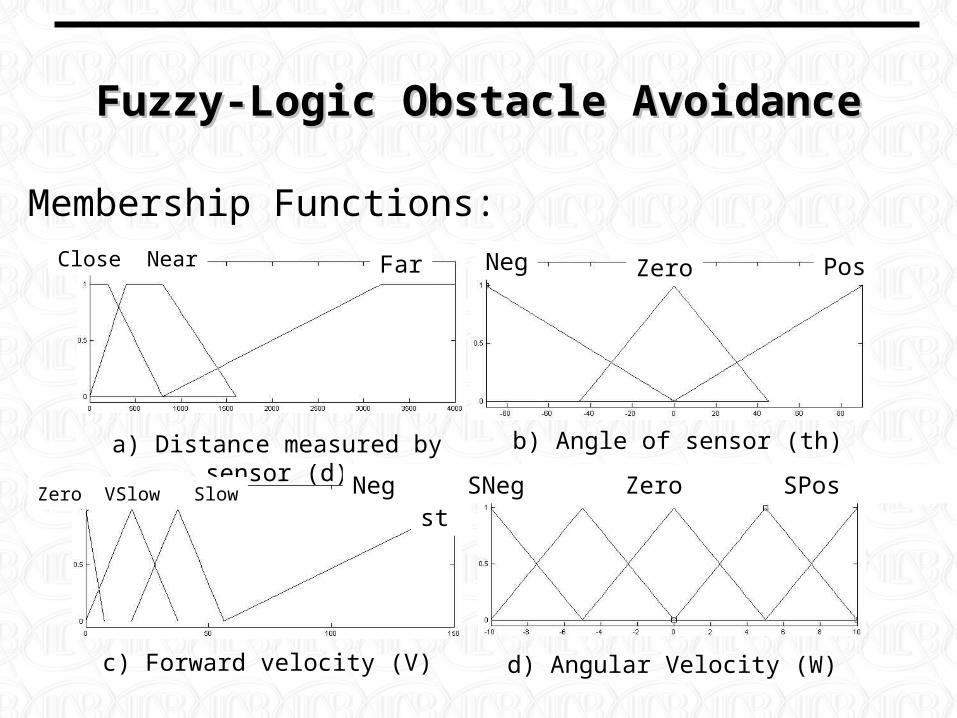
Fuzzy-Logic Obstacle AvoidanceFuzzy-Logic Obstacle Avoidance
a) Distance measured by sensor (d) b) Angle of sensor (th)
c) Forward velocity (V) d) Angular Velocity (W)
Close Near Far Neg Zero Pos
Zero VSlow Slow Fast Neg SNeg Zero SPos Pos
Membership Functions:
Fuzzy-Logic Obstacle AvoidanceFuzzy-Logic Obstacle Avoidance
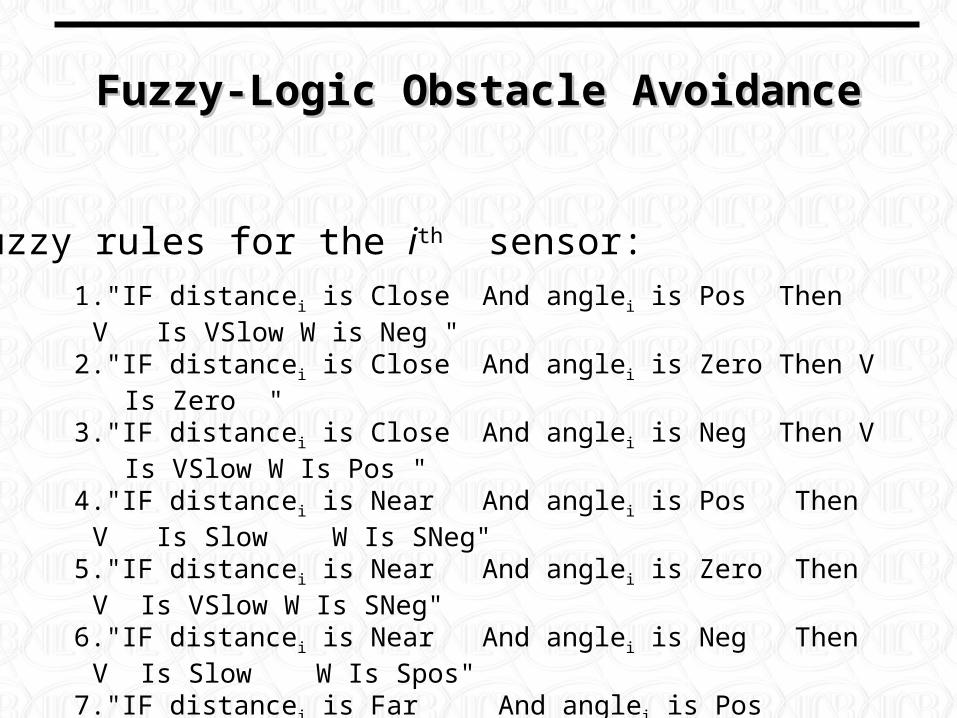
1."IF distancei is Close And anglei is Pos Then V Is VSlow W is Neg "2."IF distancei is Close And anglei is Zero Then V Is Zero " 3."IF distancei is Close And anglei is Neg Then V Is VSlow W Is Pos "4."IF distancei is Near And anglei is Pos Then V Is Slow W Is SNeg"5."IF distancei is Near And anglei is Zero Then V Is VSlow W Is SNeg"6."IF distancei is Near And anglei is Neg Then V Is Slow W Is Spos"7."IF distancei is Far And anglei is Pos Then V Is Fast W Is Zero"8."IF distancei is Far And anglei is Zero Then V Is Fast W Is Zero"9."IF distancei is Far And anglei is Neg Then V Is Fast W Is Zero"
Fuzzy rules for the ith sensor:
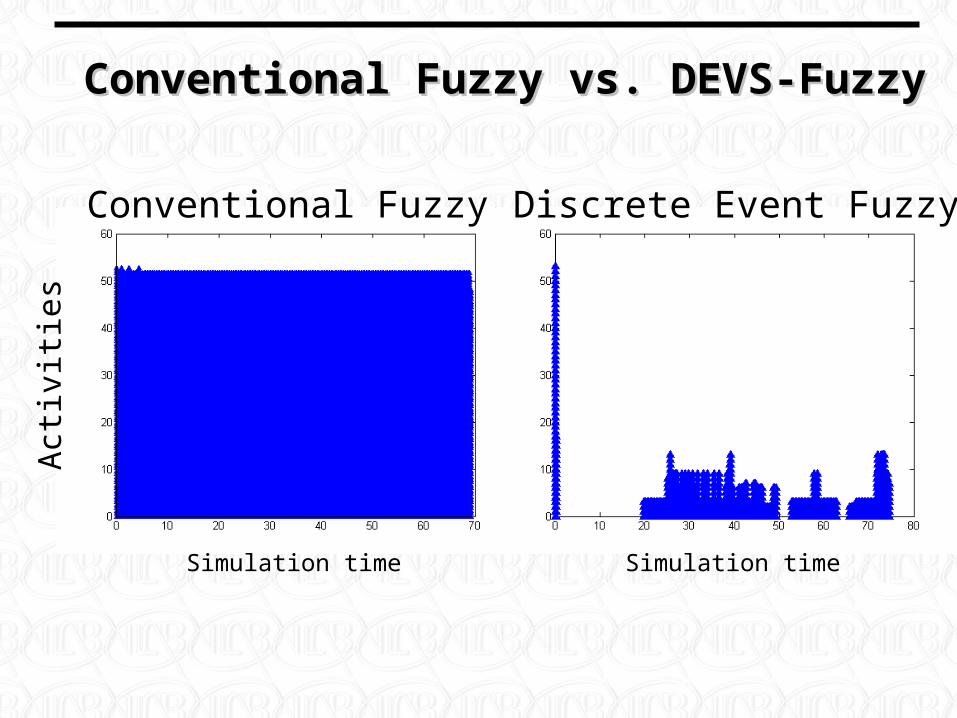
Simulation timeSimulation time
Act
ivit
ies
Discrete Event FuzzyConventional Fuzzy
Conventional Fuzzy vs. DEVS-FuzzyConventional Fuzzy vs. DEVS-Fuzzy
Cooperative RoboticsCooperative Robotics
Cooperative pushing task:

Pushing task:Pushing task:
Pushing region
rArB
G��������������
B��������������
rw��������������
lw��������������
fr=0
fr<0fr>0
fl<0
fl=0fl>0
A
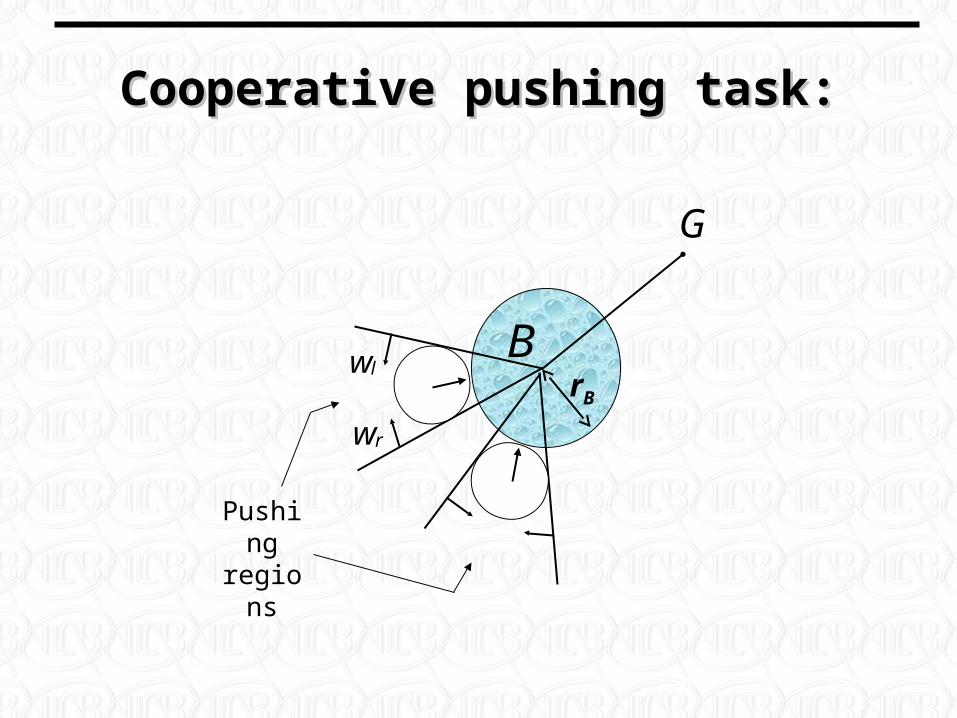
Cooperative pushing task:Cooperative pushing task:
rB
G��������������
B��������������
rw��������������lw
��������������
Pushing regions
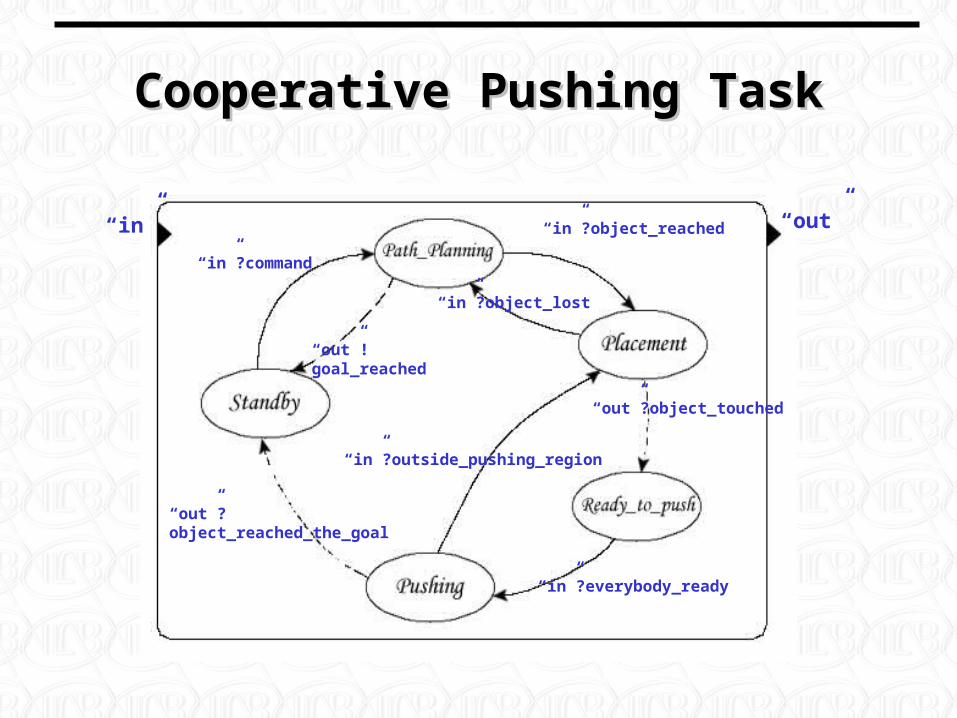
Cooperative Pushing TaskCooperative Pushing Task
“in”?command
“out”!goal_reached
“in”?object_reached
“in”?object_lost
“out”?object_touched
“in”?everybody_ready
“in”?outside_pushing_region
“out”?object_reached_the_goal
“in” “out”
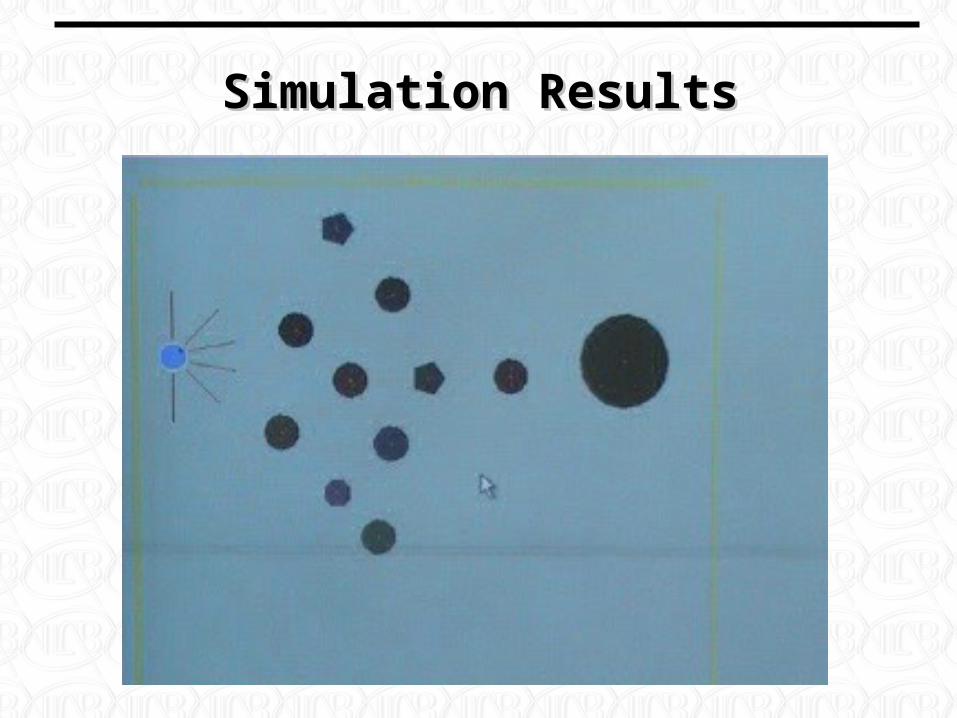
Simulation ResultsSimulation Results

Simulation ResultsSimulation Results
Experiment ResultsExperiment Results

Experiment ResultsExperiment Results









![Home [] · LUCRE-ZIA Matricola Comune di Nascita Data Nasc. Sesso 05/06/2003 21/12/2003 25/06/2003 01/12/2003 18/09/2003 16/06/2003 08/05/2003 21/10/2003 30/09/2003 03/02/2004 20/11/2003](https://static.fdocuments.net/doc/165x107/5f130ebdd542b90ada3af619/home-lucre-zia-matricola-comune-di-nascita-data-nasc-sesso-05062003-21122003.jpg)








