1996-3 Two Way Deploy Able Spherical Grids
18
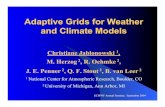
T\NO Way Deployable Spherical Grids Félix Escrig*, José Sánchez" and Juan Pérez Valcarcer*" • Professor of School of Architecture of SevilIe (Spain) •• Lecturer of School of Architecture of SevilIe (Spain) ••• Professor of School of Architecture of La Coruña (Spain) AB8TRACT: Crosspiece deployable grids are assemblies formed by groups of bars with two joints at their ends and one or more that are inward and that can vary their angular position with each other. This variation is meant in practice that assemblies change their form from a folded position where they occupy very little space to another wider that is usable as encIosure or covering. The evolution between the two extreme positions of this geometry is determined by compatibility limitations. In this paper it is studied the perfomance of spherical grids constituted by two way crosspieces, and the way of generating them from webs that subdivide the surface of the sphere. (e) "- " " , , " (b) (o) Figure 2 Figure 1 1. INTRODUCTION Figs. 1 and 2 show two deployable assemblies that are built by groups of bars which main characteristic is to have an inward joint that allows the rotation of the bars as it is shown in the Fig. 3 and so they can be packed or extend as Figs. 1 and 2 show. Figure 3 1
-
Upload
editorial-starbooks -
Category
Documents
-
view
75 -
download
6
description
Crosspiece deployable grids are assemblies formed by groups of bars with two joints at their ends and one or more that are inward and that can vary their angular position with each other. This variation is meant in practi
Transcript of 1996-3 Two Way Deploy Able Spherical Grids

T\NO Way DeployableSpherical Grids
Félix Escrig*, José Sánchez" and Juan Pérez Valcarcer*"
• Professor of School of Architecture of SevilIe (Spain)•• Lecturer of School of Architecture of SevilIe (Spain)
••• Professor of School of Architecture of La Coruña (Spain)
AB8TRACT: Crosspiece deployable grids are assemblies formed bygroups of bars with two joints at their ends and one or more that are inwardand that can vary their angular position with each other. This variation ismeant in practice that assemblies change their form from a folded positionwhere they occupy very little space to another wider that is usable asencIosure or covering.
The evolution between the two extreme positions of this geometry isdetermined by compatibility limitations.
In this paper it is studied the perfomance of spherical grids constitutedby two way crosspieces, and the way of generating them from webs thatsubdivide the surface of the sphere.
(e)
"-""
,," (b)(o)
Figure 2
Figure 1
1. INTRODUCTION
Figs. 1 and 2 show two deployableassemblies that are built by groups of barswhich main characteristic is to have an inwardjoint that allows the rotation of the bars as it isshown in the Fig. 3 and so they can be packedor extend as Figs. 1 and 2 show.
Figure 3
1

If instead of studying a plane figure, westudy a space one as in the Fig. 5.
The introduction and basis for theconstruction of this kind of grids can be foundin Ref. (1), (4) and (5).
Necessary conditions to cause these pliablegrids are that, according to Fig. 4.
Figure 7
or what means the same, conditions [1]must be complied in each inset.
If the two levels are conected by continuousbars (Fig. 7) conditions will be [3] and also itshould be complied that every two inset alsocomplied them. (Figs. 8 y 9).
[1]
432
l'¡+k'¡ = 1¡+I+k¡+1
Figure 4
l'¡+k' 1 = 12+k2 = l)+k)
Figure 5
[2]
We can also use assemblies of severallevels (Fig. 6) and conditions in this casewould be:
l'¡+k'¡ = li+l+k¡+1k+m· = k' '+m'·1 1 1 1
m'¡+n'¡ = m i+1+n¡+!
1MODULO 2 MODULO 3
Figure 6
CAPA 1
CAPA 2
[3]
Figure 8
Figure 9
This condition can be proved that issufficient, and we will be able to get grids likein the Fig. 10.
Due to these concepts we can create bent
2

Figure 10
[5]F = 3n - b - 6
With 'n' as number of knots and 'b' asnumber of bars.
This condition is necessary but notsufficient:
When 3n < b+6, there are overabundantbars.
When 3n > b+6 bars are lacking.
Figure 13
With F as the number of coerciolls thatlack.
In the case of the Fig. 12.
n = 25 b = 40F = 3·25 - 40 - 6 = 29
This grid has 12 external coercions, fromwhich, 6 are used to imrnobilize it as stiffsolido Afterwards 23 links remain to be added.
The Fig. 13 shows the sufficient1y stiffedstructure with three hyperstatic degrees.
Figure 12
(J S:;><::)~ 1}
o(o)1f
Figure 11
In this state, a grid as the Fig. 12 one,which is clearly unstable, should be completedby the number of elements that are needed tostabilize it.
The condition (Ref 5) is:
grids that share the same mechanism of foldingof isolated elements as we have describedbefore.
In the particular instance of two way gridswe have problems of angular stability due tonot be triangulated. If we want to use them asstructures we must complete the number ofelements that are needed to guarantee thisstability.
To make it easier we are going to maketheir study resemble one layer grids in such away that elements of the Fig. 11b resembleFig. 11 a ones.
3n = b+6 [4]
3

Figure 14
(e)
8±§(b)
/'
,~",
,/,,,,/' R
/'/ O< =2B",~"
" t1ü
,,, ,
,,,",
(a)
ElffiFigure 15
Both, higher knots, lower ones and crossingones will be each group of them on a sphericalsurface, in its final state.
The same will happen in the differentintermediate phases of folding although theradius will increase quickly to make itselfinfinite in the folded position.
To introduce simplified geometries in morecomplex successions that we will see from nowon, the Fig. 16 would adapt a scheme of worklike the Fig. 17 one.
Figure 16
(a) key in a vertex(b) key in the centre of a face(c) key in the centre of an arris
,,,
If every section is equal we can also solveit with equal crosspieces. Fig. 16.
,,,,,"
" ,,,
,,,,
[6]L=cx'R
In the Fig. 14 we are going to measure theopenings of equal angles in cx in such a waythat every section has the length:
2. SPHERICAL GRIDS
2. 1. Uniform Rhomboid patterns
Obviously, starting from we deviate fromthe key, quadrilaterals are distorted.
The problem of building a crosspiece gridwith its final state on a spherical surface andthe folded position in a perfect pack, is that itrequires precisely a layout on the surface of
. crosspieces that are changed into lines as it hasbeen described in the Fig. 11. This layout canbe as arbitrary as we want. But this will implythe impossibility of finding assemblies ofcrosspieces to comply with conditions [2] andso that they are pliable.
If we are looking for pliable grids weshould generate grids as regular as possible andto get this we should stablish sorne criterions.
How to subdivide a spherical grid? It isimpossible in equal modules apart from thecase of the small number of spherical regularpolyhedrons. We proprose sorne alternativesthat have been tested and that can be optionsfor grids we describe.
We can have this division by three differentways (Fig. 15):
Figure 17
4

should comes true. The limit position makesthe structure work better due to be bars in linebut precisely due to be a limit, it can start thefolding continuoing the diminution of 8, whatwould be catastrophic.
One way to avoid it is by means oflimitings of the angle, knots that are jarnmed inthat position or even better, impediments tothat evolution, for instance one bar A that isbound to the higher knot (Fig. 19). The lengthof this bar would be:
IIII
\R
A = R sen ~ tg 2~ [8]
Figure 18
TO determinate the length 1 and k thatsecions of the crosspiece have once theopening angle a. = 2~ and the radius R isfixed, we see the Fig. 18
It should go placed in every higher knotand if we got it to connect them with lowerones, we would have a structure that is stifferenough.
These layouts that we are discribing, aremechanisms in base and unless we triangulateinsets, they cannot be used as structures (Fig.20).
Figure 19
So, the fact of that in every case 8 ~ ~,
Including six supplementary coercions ofsupports, we still have 11 degrees of freedomto stop being a mechanism.
The fact of the matter is not like thisactuaIly because we are in a double layer gridthat, what is more, has capacity in flexiono Butif we really want that the assembly do not betoo flexible, is better to introduce thosecoercions into the outline (Fig. 21).
Even so if we use the expression [5].
n = 25b = 52F=75-52-6=17
Figure 20
1= RsenpcosCo +P)
k- Rsenp[7]
cos(o-P)
-_/-"-~---------.,.,; ~~ .......
_ i _, __ <'_ .
As we see, we have also to fix the finalangle that form crosspieces 28. We can fix thisangle at will and it depends on him that thegrid has more or less edge. However, there isa minimum that if it is surpassed, it wiIl makethe backing down of the structure non-viabledue to its blockage. That one where bars of amodule and of the next one line up. (Fig. 19)so 8 = ~ comes true.
/'//,,
,/::I
5

Figure 21
The problem of having introduced thesetriangulations is that their length is shorter inits final state than in intermediate phases. Thatmakes impossible the unfolding of thestructure, if bars are stiff. If instead of bars wehave flexible cable, the only thing that willhappen is that the assembly will pass by anincompatible phase, that once is surpassed, willkeep it raised preventing it from falling again.If afier that, we add stiff bars, we will be inthe presence of a true structure that hasstopped being a mechanism. That is what theRef. 13 calls 'c1icking scissor-link Deployablestructure' .
The Fig. 22 shows a pattern of this kind ofgrid including stiff diagonal bars in comermodules.
An additional advantage that this kind ofspherical subdivisions has apart fram itssimplicity is that are modulable, that is to saythat the modules can be placed together,covering completely the surface.
This is caused by the fact of that the higheror lower kinots of one edge are each group ofthe on the same plan. So we will be able togroup them in packs of two (Fig. 23) three(Fig. 24) or four moduls (Fig. 25).
PERSPECTIVAS
Figure 23
Fig.22~
6
Figure 24
Figure 25
The use of crosspieces of multiple joint isnot aH in aH possible in this cases due to notbe sections in line but we always can reinforce

2.2. Rhomboid patterns with centre
the structure in those assemblies of crosspiecesthat are holded in a plan. That is possible inthe Fig. 26 in both plans of symmetry.
The rhomboid pattems with centre isanother that can solve the subdivision of thespherical surface in equal sections. Wedesignate this to that one that results fromletting down from the key of the sphere analways equal number of rhombus for eachparalel. It is also called Lamella rhomboidsubdivision (Fig. 27).
This geometrY is a mechanism that 1S
independent of conditions of support since:
n = 41b = 72F = 3-41 - 72 - 6 = 45
The eight jointed low points (Fig. 28) result24 conditions, from which 6 are the solid stiffanes. We have still 45-18 = 27 degrees left offreedom that we can onIy coarce triangulatingevery rhombus, what would result 32coercions. The problem is that these bars thattriangulate, are working in compression, sothey cannot be cables.
We say again that crosspieces structure hasnot exactly these determinant due to work inflexiono But this criterion is the most suitableif we want it no to be too deformable.
The Fig. 29 shows a semisphere with thissolution and the Fig. 30 a built model.
9
~~ ._',-'- '-'l"'~--
.... I __ ' .'_ .... ,,--- .....~A r FlLAA .~.
.-~.-~~~...~~--;,:-;--~
8
.'!.o
QA8~
I
Figure 26
Figure 27
;¡-cFigure 28 Fig.29
7

~Fig.33
It is got by intersection of two families ofmeridians that are generated by twoperpendicular polar straight line and wereplaced on the same equatorial plan.
Figure 34
2.3. Quadrangularpatterns ofMeridians
This solution works much better and resultsmore attractive geometries if we do not useconstant lengths and so the edge of crosspiecesalso turns into variable (Fig. 34).
That makes it be particularly suitable forretractable covering of circular ground plan.The Fig. 32 shows a model and the Fig. 33shows an application over a bullring.
It does not seem to be an excessivelysuitable solution if we compare it with othersort of quadrangular or triangular. However, ithas an advantage that we have not still appliedin great size but that makes it irreplaceable.That is because instead of folding at the centre,it can fold at the edge how it is observed in theFig. 31.
x
*Fig.32
Fig.30
8

6

[9]
It is a question, then, of once known thereticle of a j , to fix angles ~i that are able tosatisfy former criterion to be able to applyconditions [7] that once generalized result.
I Rsenp¡l.=l¡ 1
I - cosCo +p¡)
I Rsenp¡k¡=kj-1
cosCo -p)Is there any uniform quadrangular grid that
complies with these conditions?Let us suppose that we start fTom separated
meridians by a constant opening 8. The grid istaken is what is showed in the Fig. 37.
Figure 37
m
'l/
//1
///
I¿~~--'/--
n
To fix the length of sections, we just makethe most of trigonometrical formulas ofspherical rectangular triangles where lengths b1
and b2 are given by expressions:
i
! /I 1/,I IIr/¡~/
.__P-:---- I
!I..o
We will adopt next criterions:a) As crosspieces have different edge, dueto be variable, we will adapt as geometricalplace on the spherical surface, intersectingpoints one, and will refer the radius R tothem.b) Conditions [2] are complied once fromleft to right of every pair of points A; B¡,angles ~i are equal.c) To obtain the maximum regularity, thetangent to the arch of the circle in thecrossing point bisects the angle 28 thatforms crosspieces.d) We will measure spherical sections In
radians a j so their length will be Raí'
Figure 36
Figure 35
The drawback is that sections of subdivisionthat are got, have not a constant length andthat, force to use several kinds of crosspiecesthat, to be pliable must comply with conditions[2].
We had seen in [6] how to determinatelengths of bars that form crosspieces whenevery section was the same. When sections aredifferent (Fig. 36) we will base ourselves onthe same deductions.
10

tanbl tanb2 =sennosenmoIn matrix form:
where m and n are the number of sectionswith a value 8 in every direction.
With that, we find out that values a ofevery section, in the case of the Fig. 38 thereare twelve different ones.
cosb l
cosb2
cosmocosno
[10]a¡
1 1 o o o o o O O OP u a2
O 1 100 o O O o OP¡2o O 1 1 O O O O O O
a3
O 100 1 O O O O O P13 a4
O O 100 1 O O O O P14 as
O O O 1 O O 1 O O O P22 = a 61 [12]O O O O 1 100 O O P23 a7
O O O O O 1 1 O O O P24 asO O O O O 1 O 1 O O
P33 a9O O O O O O 1 O 1 O
O O O O O O O 1 1 OP34 a lO
O O O O O O O O 1 1 P 44 a ll
a 1.2
System of 12 equations with 10 unknowquantities, so they are incompatible unless twoof the equations are linear combination offormer ones.
Our problem consists now on find outvalues Pi in accordance with the Fig. 38 andattached criterions. To do this, as values Pi thatopen round each knot, are the same in the fourdirections, for each one of them, we willdesignate Pi with the same subscripts thanknots.
Due to the symmetry, this must becomplied:
12 \130< \14ex, 3[13]
[15]
[14]
[A] -[x] = [k]
(JI) = [A] (x) -(k)
AT A x = AT K
With this we have got a square system andthe pseudosolution x is solution of the newsystem (that can be unique or not depending onthe rank of AT
• A).If the rank of this matrix is equal to the
number of unknown factors Pi' the reachedpseudosolution is a 'better approximation' andwhat is more, is unique. Nevertheless, thatpseudosolution has an error that is calculatedlike this:
Systems of this kind are also called highrectangular and they have not evidently anysolution except for the aforementioned case.
However, we have already seen previouslythat we even accepted approximate solutions atthe expense of inserting little flexions in bars.One may ask then if the system admits sorneapproximate solutions that satisfy equationswith the minimum possible error.
It can be proved that this system have abetter approximation and is the only one inHilbert's space (the space is unique for beingstrictly stablished norms for it).
The pseudosolution is got from the systemAx = K multiplied by the transposed of A, AT.
0<.0<0
P22+P23 = a 7
P23+P24 = a 8
P23+P33 = a 9
P24+P34 = a lO [11]P33+P34 = a ll
P34+P44 = a l2
ex.
1 1 ex,
.•" ......,
PI1+Pl2 = alPl2+P13 = a 2P13+PI4 = a 3Pl2+P22 = a 4P13+P23 = asP14+P24 = a 6
Figure 38
11

(V) is the error vector(x) is the pseudos01utionEquations [15] are stated like this:
PII + PIZ - al = VIPI2 + PI3 - a z = VzPI3 + PI4 - a J = v3PI2 + P22 - a 4 = v4PIJ + P23 - as = VS
PI4 + PZ4 - a 6 = v6
PZZ + P2J - a 7 = V7
PZJ + P24 - as = VS
PZJ + 13JJ - a 9 = V9 [16]13z4 + 1334 - a lO = VIO133J + PJ4 - a l ¡ = VIIPJ4 + 1344 - a l2 = VIZ
,A.
k.* +k** _ Rsenn..I ¡ - 1",
cosCo -Pi)
cos(o+~)2
cosCo _~)2
[17]
Rsen P¡+P¡+l2
Rsp.+n.
. en I P¡~I
2
cos(o+ P¡+P¡+l)2
cos(o- P¡+P¡+l)2
Rsenp¡
cosCo +P)
p.Rsen-'
2
Rse p¡n-2
z.**I
k.**I
l ~ 1~*, + ¡
* **n¡ +n¡
* **m¡ +m¡
Figure 40The physical sense that every component ofthe error vector has, in this case, is therepercusion that the pseudosolution, which isgot for Pj , has on every a j •
This mathematical posing provides sornes01utions that are very adapted to the realphysica1 perfomance of the structure, as errorsin the unfolded state, if they are small, havevery little repercussion on the functioning.However, in the folded state, it does not admitthe slightest error. And in this position the on1ything that counts is that values of Pi in everyknot i are all of them exactly equal. Thiscomes true because we start from that.
Why to use grids of unequa1 bars when therhomboidal cutting patterns has not thisdrawback and the final appearance is similar?
One of the main reasons is that in this casecrosspieces are in line in plans and that makesthe use of multiple grids.
We already saw in [9] how to obtain1engths of sections of the simple crosspiece. Inthe case of multiple grids of total lengths ofsupplementary bars are got by the sameprocedure bearing in mind respective Pi and
Figure 39 m.* -1**1-'I
that the opening of these new crosspieces alsois 20 (Fig. 39). However, bars are of foursections now and usab1e expressions to fix thirlengths are, around the knot i (Fig. 40).
n.* =k**I ¡
12

Figure 41
2.4. Quadrangularby Projection Pattern
Figure 42
Anyway we are in a field where it can befound fortunate solutions that minimize errorsand each one of these singular solutions is agrid to inc1ude into the catalogue of solutionsto the problem this is an open field where wehave reckoning very few altematives so werecommend an exhaustive study. We haveneither found any reference that means anovelty in a bibliography that is specialized inspherical grids.
One of this grids that produces less errorsis the one that we got projecting from theopposite pole of the perpendicular axis of thegrid (Fig. 43).
Rsp.+n.en / P¡-I
2
Rsp.+n.en / Pi-I
2
cosCo +P¡+P¡-l2 )
* ***n¡ +n¡
* ***m¡ +m¡
F
Another procedure to obtain quadrangulargrids by means of a division of a sphericalsurface, consists on projecting on it from anyfocus an square flat retic1e (Fig. 42).
Starting from that we will get values <Xi
from the retic1e of the surface and by it wewill adjust values 13i by means of equations[13] and if it is necessary, by means of theadjustment by square minimums [14].
As the focus can be arbitrary we can findvery distorted grid, which will produce, ingeneral, big errors into the expression [15],what will obstruct the solution.
( ~ P¡+P i - 1 )cos u----2
With this relation can be got every lengthof sections of bars, as the complet length ofthem.
This kind of crosspiece grid has had itsbrightest application into the Sport Centre inMexico by Félix Candela although in this caseis applied to a stiff and deployable one. (Fig.41).
13

O.O.R
~O.O,-
Figure 44
xj=acos8 =Rsen2&los8
yj=asen8 =Rsen2&¡en8
Coordinates of the knot j will be (xj, yj' Zj)'Coordinates of the knot i (xj , y¡, zJThe distance between the two points will
be:
Figure 43
atanyj = R+h
Once we get the points of the sphericalreticle, we will adjust sections of maximumcircle arnong them and we wiIl find out values(Xi'
This process is easy if it is done with aprogramme of Computer Assisted Drawing.
If we want to do it analyticaIly, we will getcartesian coordinates of points of the grid onthe surface.
According to Fig. 44:
[20]d
a=2arcsen-2R
Although points of this reticle are in planesaccording to the way of projection, once weadjust crosspieces, due to be in maximumcircles and their centre do not coincide withthe projection focus, the group of crosspiecesthat corresponds to points of the reticle in lineare on a warped surface.
This means that we cannot adjust multiplecrosspieces so the objection to have to usecrosspieces of different lengths is notcompensate for the advantage of being able toreinforce them.
So, this system of division is structural andconstructively less convenient than the three
d=J(XFXl+(Yj-Yi+(Zj-Z¡)2 [19]
If we want to find out the angle that itforms a maximum circle that pass throughthose two points:
[18]
Zj=2RcosYj-R=R(2cosyj-l)
a=2RsenYlosYj=Rsen2Yj
14

PROYECCION POLAR
.,1-+-'-----="'7-1 11~~~*-tt:t:~::tt::::::::::f;:J6~__.1J 1/
1//11L2;:::J¡~~~:'h::1"'H-;--¡~-R;;;;;;:::~111
11/t-';--l..-4--l..(-i-II-+-l-~'-r-!-~_--f.+-I--H'--_~11
11\ \ \ / /111' // 1ti
1111 1/1/ ti
: 1/11
Figure 47
Figure 46
2.5. Geodesic Quadrangular Pattern
Figure 45
TO not be restricted to the cube, weconsider any plan with a reticle of squares andprojection from the centre as geodesicquadrangular projection (Fig. 46), theadvantage of these grids are that crosspieces ofevery line of sections are in the same plan, sothey can be also solved with multiplecrosspieces, being able to obtain very stiffforms.
aforementioned.The only advantage that can make its study
advisable is that when we can move the focusat will, we can adjust surfaces to architecturaldemands, sort of functional or aesthetic.
It is a particular case of the former onewhere the focus coincides with the centre ofthe sphere. So, directly, the reticle that is got,is formed by sections of maximum circle.
To speak of geodesic quadrangular pattemwe can just start from the cube as regularpolyhedron (Fig. 45), although froro any otherpolyhedron with triangular subdivision wecould group triangles in two to obtain rhombusthat are in our fiel of study.
15

Figure 49
Figure 48
2.6. Grids of Tetrascissors withQuadrangular Patterns
IIIIIII Si 1¡-----'II 1~ I
To fix vertices of prisms where we delimitcrosspieces, we can find out starting fromssections a jj subdivisions Pi as we have done in[13] (Fig. 49).
of the Fig. 47 for a plan that is placed in asphere which radio is one and two projectionsaccording to headings 2.4. and 2.5.
If instead of using crosspieces as the Fig. lone we use pairs of scissors as those that wesaw in the Fig. 2 we can get another kind ofstructures starting from the same pattem thathave been explained in former headings.
In the Fig. 48 is observed the generation ofthis kind of grid.
P. GEODESIC ERROR P. FOCAL ERROR
13. 0.2230 O 0.1383 O
13> 0.1618 -0.0350 0.1317 -0.0040
13, 0.1132 0.0229 0.1224 0.0056
13. 0.1479 O 0.1090 O
13, 0.1646 -0.0350 0.1323 -0.0040
13. 0.1313 0.0443 0.1268 0.0077
13, 0.1048 0.0229 0.1200 0.0056
13. 0.1341 0.0475 0.1277 0.0080
J3., 0.1138 0.0443 0.1229 0.0077
13,. 0.1148 0.0475 0.1241 0.0080
Table 2
Another advantage is that once we movethe position plan, we can have grids more orless canted and more or less distorted.
To this effect we could say that is the mostcomplex of the studied cases.
However, in front of the quadrangulardomes of projection in the focus in a pole, wehave bigger errors in the application ofequations.
Let us see the comparison of two examples
Table 1
P. GEODESIC P. FOCAL
CX l5 0.3876 0.2706
cx25 0.3614 0.2680
CX26 0.2859 0.2588
CX36 0.2577 0.2526
CX37 0.1951 0.2368
CX47 0.1824 0.2290
CX58 0.2971 0.2610
CX68 0.3063 0.2612
CX69 0.2008 0.2420
CX79 0.2240 0.2430
CX81 0.2014 0.2438
CX9L 0.2527 0.2506
16

Figure 50
h¡ =/e 2 +R2tan2 p -2Rltanpcoso
ESCRIG, F., Expandable Space FrameStructures, Space Structures, Ed. Elsevier, Surrey,1984.
ESCRIG, F., Expandable Space FrameStructures, International Joumal of SpaceStructures, Vol. 1 ne
, 2, Surrey, 1985.
GANTES, c.; CONNOR, 1. & LOGHER,Geometric and Structural Design Considerationsfor Deployable Space Frames, RapidlyAssembled Structures, Ed. P.S. Bulson,Computational Mechanics Pub, Southampton,U.K., 1991.
7.
4.
3.
1. CALATRAVA, S.; ESCRIG, F. &VALCARCEL, 1.P., Arquitectura Transformable,E.T.S.A. from Seville, 1993.
3. References
;to
2. CANDELA, F., Una estructura metálicaReticulada. El Palacio de los Deportes enMéjico, I Encuentro Internacional EstructurasLigeras para grandes luces. Fundación EmilioPérez Piñero, Murcia, 1992.
Fig. 51
Grids of tetrascissors neither are speciallyuseful, nar contribute advantages on previouslystudied one although they have more stiffnessthan simple ones.
In any case, they open a little explored fieldof study.
[22]
[21]
d =h -c2 2
d¡ =h¡ +c
! , ,7jI~/
\/ /
I //\ \ I /
\ //\~1
In a general case, every diagonal does notgo through the same point.
But, if the errar is small, it can be admiteduntil a 2 per cent.
A solution we have tried, although is shoredup very soon, is to use equal bars and open thepack assuming that the two degrees ofadditional freedom that modules have, make itsopening possible.
In the Fig. 51 is shown a model of thiskind.
c=R~ tan2 p +4cos2 p -4tanpcos2 ~
With this obtained knots we fix the solidquadrangular where inward diagonals areplanned (Fig. 50).
h2 =Jk2+R2tan2 p -2Rktanpcoso
If we want to limit distances to thespherical surface.
17

8. HERNÁ NDEZ, C., Es/nlctllrOS Transformables.&tran 1, Tecnología y Construcción n'" 4,Caracas, 1988.
9. HOBERMAN, C., Ar/ and Science ollo/dings/ructures, Sites Vol. 24, N.Y., 1992.
10. PIÑERO, E., Spanish patents 266.801, 283.201311.901
11. PIÑERO, E., Estructuras reticulares,Arquitectura nct 112, Madrid, April, 1968.
12. PIÑERO, E.L' ArchitectureDecember, 1968.
Estructured'aujourd'hui
reticu/ées,vol. 141
13. ROSENFELD, Y, and others, A pr%type'cliclcing' scíssor-Link Dep/oyable Structllre, Ed.by Srivastaba, IASS lnternalional Congress,Toronto, 1992.
14. SHAN, W., Configuration Sludies 01 fo/dableSlructures. Space Structures, Ed. Parke, ThornasTelford, London, 1993.
15. VALCARCEL, J.P. & ESCRJG, F., Analysis 01Curved Expandab/e Space Bar Structures, 10years of Progress in Shell and Spatial Structures.Ed. CEDEX-LASS, Madrid, 1989.
18