
19 th INTERNATIONAL CONGRESS ON ACOUSTICS … · NONLINEAR MODAL APPROACH FOR ELECTRODYNAMIC...
6
19 th INTERNATIONAL CONGRESS ON ACOUSTICS MADRID, 2-7 SEPTEMBER 2007 NONLINEAR MODAL APPROACH FOR ELECTRODYNAMIC LOUDSPEAKER MODELING PACS: Quaegebeur Nicolas 1 ; Chaigne Antoine 1 1 UME-ENSTA Chemin de la Hunière 91761 Palaiseau FRANCE [email protected] ABSTRACT During large amplitudes of vibration, nonlinearities affect the electroacoustical behavior of electrodynamic loudspeakers. The classical model for nonlinearities consists of a nonlinear lumped parameters model, which holds the simplifying assumption that the vibration pattern can be reduced to a single rigid-body mode. This assumption is no longer acceptable in the whole audible range since mechanical resonances modify the vibration pattern. In this study, attention is paid to the nonlinear vibrations of loudspeaker-like structure, using the dynamic analog of the Von-Kármán equations in order to include geometrical nonlinearities in the local vibration equations. The solutions are expanded onto the linear modes of the structure. The discretized equations of motion are then coupled with an electrical equation (input impedance of the voice-coil) including electrical nonlinearities. Numerical results are compared to experimental measurements performed on a prototype developed at the LAUM in le Mans University (France) by G. Lemarquand. A good agreement is observed between predictions and experiments in the audible range for both low and large amplitudes. INTRODUCTION For large amplitudes of vibration, nonlinearities affect the electroacoustical behavior of electrodynamic loudspeakers. The classical model for nonlinearities consists of a nonlinear lumped parameters model [1-2], which holds the simplifying assumption that the displacement pattern x(t) can be reduced to a single rigid-body mode (as presented in Eq. 1). In that case, the acoustical in-axis response of the loudspeaker is viewed as a high-pass filter, as shown in Figure 1. Figure 1.- In-axis Sound Pressure Level measurements performed on a commercial medium loudspeaker (blue) compared to the Thiele and Small solution (red). The influence of mechanical resonances has to be included in the model in order to extend the validity of the prediction.
Transcript of 19 th INTERNATIONAL CONGRESS ON ACOUSTICS … · NONLINEAR MODAL APPROACH FOR ELECTRODYNAMIC...

19th INTERNATIONAL CONGRESS ON ACOUSTICS
MADRID, 2-7 SEPTEMBER 2007
NONLINEAR MODAL APPROACH FOR ELECTRODYNAMIC LOUDSPEAKER MODELING
PACS: Quaegebeur Nicolas1; Chaigne Antoine1
1UME-ENSTA Chemin de la Hunière 91761 Palaiseau FRANCE [email protected] ABSTRACT During large amplitudes of vibration, nonlinearities affect the electroacoustical behavior of electrodynamic loudspeakers. The classical model for nonlinearities consists of a nonlinear lumped parameters model, which holds the simplifying assumption that the vibration pattern can be reduced to a single rigid-body mode. This assumption is no longer acceptable in the whole audible range since mechanical resonances modify the vibration pattern. In this study, attention is paid to the nonlinear vibrations of loudspeaker-like structure, using the dynamic analog of the Von-Kármán equations in order to include geometrical nonlinearities in the local vibration equations. The solutions are expanded onto the linear modes of the structure. The discretized equations of motion are then coupled with an electrical equation (input impedance of the voice-coil) including electrical nonlinearities. Numerical results are compared to experimental measurements performed on a prototype developed at the LAUM in le Mans University (France) by G. Lemarquand. A good agreement is observed between predictions and experiments in the audible range for both low and large amplitudes. INTRODUCTION For large amplitudes of vibration, nonlinearities affect the electroacoustical behavior of electrodynamic loudspeakers. The classical model for nonlinearities consists of a nonlinear lumped parameters model [1-2], which holds the simplifying assumption that the displacement pattern x(t) can be reduced to a single rigid-body mode (as presented in Eq. 1). In that case, the acoustical in-axis response of the loudspeaker is viewed as a high-pass filter, as shown in Figure 1.
Figure 1.- In-axis Sound Pressure Level measurements performed on a commercial medium
loudspeaker (blue) compared to the Thiele and Small solution (red). The influence of mechanical resonances has to be included in the model in order to extend the validity of the
prediction.

19th INTERNATIONAL CONGRESS ON ACOUSTICS – ICA2007MADRI D
2
(Eq.1)
This model includes the 6 classical Thiele and Small parameters (electrical resistance Re, voice-coil inductance L, force factor Bl, mechanical mass Mm, mechanical stiffness Km and mechanical resistance Rm) and the voltage U(t) and current i(t) at the voice-coil. This one degree of freedom assumption is no longer acceptable since mechanical resonances modify the vibration pattern in the audible range, as presented in Figure 1. Experimental [3] and psychoacoustical [4] studies have shown the relevance of the high frequency response of loudspeakers for transients, so that the Thiele and Small model is no longer valid. Other models, which make use of finite and boundary elements [5] or analytical formulations [6] can explain the complex vibration and radiation patterns but are limited to the linear range. In the present study, a nonlinear modal approach is considered, in order to model the nonlinear vibration and radiation pattern. The dynamic analog of the Von-Kármán equations are used in order to include geometrical nonlinearities in the local vibration equations [7]. The radiation problem is solved in the time-domain using the Spatial Impulse response theory [8]. The results are compared, in both linear and nonlinear ranges, with measurements performed on a loudspeaker prototype using ferrofluid supension developed in the Laboratoire d’Acoustique de l’Université du Maine (LAUM) by Guy Lemarquand [9].
MODAL APPROACH Mechanical equations of the problem In order to include the high frequency mechanical behavior of the loudspeaker diaphragm, the Von-Kármán dynamical equations of vibration of plates and shells are used and can be found in [7]. Introducing a modal decomposition on the linear modes as described in Eq. 2 :
( Eq.2 )
where Φp(r) denote the modal shape and qp(t) the time function associated to each mode p. After projection of the Von-Kármán equations on each linear mode a, one obtain Eq. 3 :
( Eq.3 )
In Eq. 3, ωp and µa denote the angular frequency and the modal damping of mode a, respectively. Ta is the excitation of the mode (via the moving coil) and ε a nondimensional parameter that determines the amplitudes of the nonlinearities. The geometrical nonlinearities are introduced through quadratic βpqa and cubic Γpqau terms that couple all oscillators together. For standard loudspeakers, experimental observations [3] show that nonlinearities give rise to harmonics in the response of the system (harmonic distortion). Internal mode coupling, where energy is transferred from one mode to another, has not been observed in our experiments. Thus, we assume that the main non linear effects are due to the terms βaaa and Γaaaa (which gives rise to harmonic terms in the nonlinear response of mode a) and we neglect the cross-coupling terms βpqa and Γpqau between oscillators a, p, q and u. It is therefore reasonable to study those coefficient only, since it is the only factor that contains the most pronounced nonlinear effect, so that Eq. 3 is reduced to a Duffing equation containing quadratic and cubic nonlinearities, as expressed in Eq. 4 :
( Eq.4 )

19th INTERNATIONAL CONGRESS ON ACOUSTICS – ICA2007MADRI D
3
The electrical equation (to obtain the excitation term Ta ) is derived from recent works on nonlinear models of loudspeaker subjected to large amplitudes motion [2]. The approach consist on a Thiele and Small model (as described in Eq. 1) assuming that the parameters can depend on the static position of the voice-coil (this approach is very powerful for low frequency prediction of non linear behavior). Formulation and resolution The problem is then expressed using the state-space formulation in order to be solved numerically for any input signal u(t), as expressed in Eq. 5 :
( Eq.5 ) where Y denotes the state vector containing the intensity i(t), the displacemen functions qp(t) and its derivative, A is the state matrix containing the linear dynamic of the problem, B the excitation vector and Nle and NLg the vectors containing the electric and geometric nonlinearities, respectively, as described in Eq.6. Then the Eq.5 is solved numerically using a commercial solver (Matlab© operator ‘ode23s’ ) with the fixed point technique and high-order Runge Kutta schemes.
( Eq.6)
Radiation Problem In order to keep the temporal resolution scheme, the radiation problem is formulated in the time domain, by use of the Rayleigh’s integral. The major assumption is that the diffraction effects are neglected (all points are considered as monopoles distributed all over the surface), as expressed in Eq. 7 :
( Eq.7) Where denotes the sound pressure field at point x and time t, ) the Green function in free-space and the density of the surrounding fluid. This expression can be simplified introducing the modal expansion of Eq. 2 :
( Eq.8)
where the Spatial Impulse Responses (S.I.R.) depend on the modal shape, on the shape of the structure and on the observation point x.. The calculation of these functions in the time domain can be found in [8] and [10] in the case of planar and spherical sources and has been developed in the case of a structure of revolution in the present work.

19th INTERNATIONAL CONGRESS ON ACOUSTICS – ICA2007MADRI D
4
APPLICATION : EXPERIMENTAL RESULTS Description of the case of interest In the present paper, we focus on a prototype developed at the Laboratoire d’Acoustique de l’Université du Maine (LAUM) by Guy Lemarquand [9]. The advantage of the present prototype is that the mechanical part can be easily removed, due to a ferrofluid suspension. Figure 2 represent a picture of the prototype in the anechoïc room of ENSTA (left) and some of its movable caps (right). This unit is build using a ferrofluid suspension (the first resonance is due to the rear cavity), and with an ironless motor. Most of the nonlinearities commonly observed on loudspeakers are avoided in the present case. Under this consideration, the geometrical nonlinearities remain the major source of experimentally observed nonlinearities and the present model allow us to predict this behavior. All measurements and simulations presented here are obtained with a 55mm convex spherical cap. The first step is to determine electric constants (electrical resistance Re, coil inductance L, and the force factor Bl ). This is achieved using identification techniques derived from [11].
Figure 2.- (left) Picture of the prototype - (right) Picture of the movable mechanical parts
(plane, convex and concave spherical caps made of aluminium, balsa or paper)
Then, the mechanical resonances have to be identified. This is achieved through a modal analysis software (IDEAS©) that express, for each mode a :
- the modal frequency fa - the modal damping factor µa - the excitation factor Ta nondimensionalized by the first factor T1 - the modal shape Φa(r)
The nonlinear factors βa and Γa are measured by exciting the structure at the mode frequency fa for different excitation levels and measuring the realtive levels of different harmonics.
Frequency
fa (Hz)
Damping µa (%)
Excitation
Ta
Quadratic
βa
Cubic Γa
Modal Shape
Φa(r)
Mode 1
200
100
1
0
0
Mode 2
9 600
3.3
20
1
109
Mode 3
17 300
3.1
2
0
0
Mode 4
18250
1.2
1.2
0
0
Table I.- Modal analysis of the considered prototype. The first mode corresponds to a resonance of the rear cavity, and the other modes correspond to mechanical resonances. Only
the second mode is assumed to be responsible for geometric nonlinearities.
19th INTERNATIONAL CONGRESS ON ACOUSTICS – ICA2007MADRI D
5
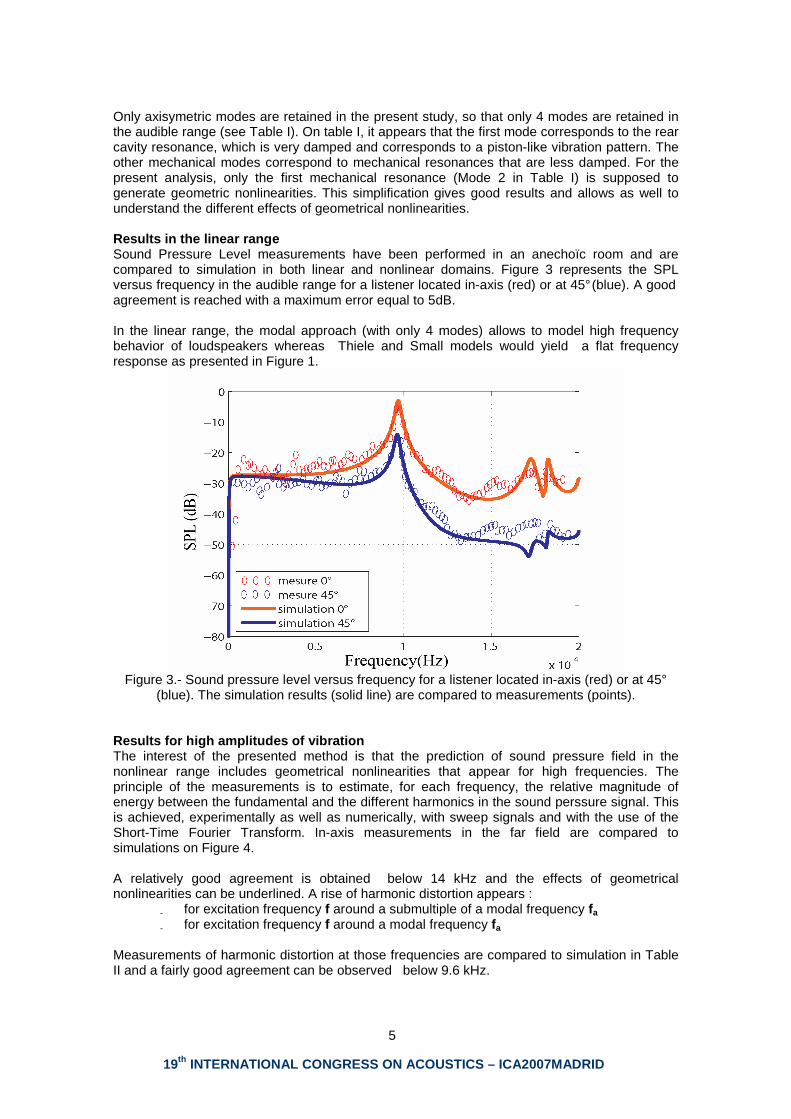
Only axisymetric modes are retained in the present study, so that only 4 modes are retained in the audible range (see Table I). On table I, it appears that the first mode corresponds to the rear cavity resonance, which is very damped and corresponds to a piston-like vibration pattern. The other mechanical modes correspond to mechanical resonances that are less damped. For the present analysis, only the first mechanical resonance (Mode 2 in Table I) is supposed to generate geometric nonlinearities. This simplification gives good results and allows as well to understand the different effects of geometrical nonlinearities. Results in the linear range Sound Pressure Level measurements have been performed in an anechoïc room and are compared to simulation in both linear and nonlinear domains. Figure 3 represents the SPL versus frequency in the audible range for a listener located in-axis (red) or at 45° (blue). A good agreement is reached with a maximum error equal to 5dB. In the linear range, the modal approach (with only 4 modes) allows to model high frequency behavior of loudspeakers whereas Thiele and Small models would yield a flat frequency response as presented in Figure 1.
Figure 3.- Sound pressure level versus frequency for a listener located in-axis (red) or at 45°
(blue). The simulation results (solid line) are compared to measurements (points).
Results for high amplitudes of vibration The interest of the presented method is that the prediction of sound pressure field in the nonlinear range includes geometrical nonlinearities that appear for high frequencies. The principle of the measurements is to estimate, for each frequency, the relative magnitude of energy between the fundamental and the different harmonics in the sound perssure signal. This is achieved, experimentally as well as numerically, with sweep signals and with the use of the Short-Time Fourier Transform. In-axis measurements in the far field are compared to simulations on Figure 4. A relatively good agreement is obtained below 14 kHz and the effects of geometrical nonlinearities can be underlined. A rise of harmonic distortion appears :
- for excitation frequency f around a submultiple of a modal frequency fa
- for excitation frequency f around a modal frequency fa
Measurements of harmonic distortion at those frequencies are compared to simulation in Table II and a fairly good agreement can be observed below 9.6 kHz.

19th INTERNATIONAL CONGRESS ON ACOUSTICS – ICA2007MADRI D
6
Figure 4.- Measurements (points) and estimation (solid line) of magnitude of the fundamental
(blue) and harmonics 2 (red) and 3 (orange) in the in-axis response at a distance of 1m.
f1 = 9.6kHz
2f1/3 = 6.4kHz
f1/2 = 4.8kHz
f1/3 = 3.2kHz
Harmonic 2 measured : estimated :
-42 dB -43 dB
-61 dB -57 dB
-41 dB -31 dB
-61 dB -62 dB
Harmonic 3 measured : estimated :
-64 dB -64 dB
-43 dB -44 dB
-35 dB -75 dB
-24 dB -28 dB
Table II.- Relative magnitude of harmonics 2 and 3 in the in-axis response.
CONCLUSIONS The present study focuses on a nonlinear model of loudspeaker using a modal decomposition of te displacement field of the membrane. The dynamic analog of the Von-Kármán equations are used in order to describe the mechanical behavior including geometrical nonlinearities. The sound pressure field is computed using the Rayleigh’s integral and compared to measurements on a prototype of loudspeaker. A relatively good agreement is reached which validates the model for non linear behaviour in the whole audible range whereas other models are limited to low frequencies. References : [1] R.H. Small. Closed-box loudspeaker systems, part 2 : large-signal analysis. Journal of the Audio Engineering Society, 21(1) : 11-18, January 1973. [2] W. Klippel. Nonlinear large-signal behavior of electrodynamic loudspeakers at low frequencies. Journal of the Audio Engineering Society, 40(6) : 483-496, June 1992. [3] N.W. McLachlan. On symmetrical modes of vibration of truncated conical shells with application to loudspeaker diaphragms. Proceedings of the Physical Society, 44 : 408-425,1932. [4] F.E. Toole. Loudspeaker measurements and their relashionship to listener preferences : part 1. Journal of the Audio Engineering Society, 34(4) : 227-23, April 1986. [5] O. Von Estorff. Boundary elements in acoustics. W.I.T. Press, 2000. [6] A.M. Bruneau. Rayonnement d'un haut-parleur à diaphragme conique. Acustica, 48(2) : 86-96, 1981. [7] O. Thomas. Vibrations non linéaires de coques minces. Rapport post-doctoral, 2001-2003. [8] P.R. Stepanishen. Transient radiation and scattering from fluid-loaded oscillators, membranes and plates. Journal of the Acoustical Society of America, 88(1) : 374-385, July 1990. [9] G. Lemarquand. Un nouveau concept de haut-parleur électrodynamique. In Actes du 8ème Congrès Français d'Acoustique, Tours, 2006. [10] J.A. Ketterling. Acoustic field of a wedge-shaped section of a spherical cap transducer. Journal of the Acoustical Society of America, 114(6) : 3065-3075, December 2003. [11] J. Scott, J. Kelly, and G. Leembruggen. New method of characterizing driver linearity. Journal of the Audio Engineering Society, 44(4) : 258-265, April 1996.


















