
1 ONR N00014-97-1-0946 Exploration of Hybrid and Intelligent Control Architectures in Conjunction...
29
1 ONR N00014-97-1-0946 Exploration of Hybrid and Intelligent Control Architectur Conjunction with Probabilistic Verification (ONR N00014-9 S. Shankar Sastry ONR Project Review, July 21, 1998 Electronics Research Laboratory University of California, Berkeley Overview of ONR UCAV Project
-
date post
21-Dec-2015 -
Category
Documents
-
view
221 -
download
0
Transcript of 1 ONR N00014-97-1-0946 Exploration of Hybrid and Intelligent Control Architectures in Conjunction...
1
ONR N00014-97-1-0946
Exploration of Hybrid and Intelligent Control Architectures in Conjunction with Probabilistic Verification (ONR N00014-97-1-0946)
S. Shankar Sastry
ONR Project Review, July 21, 1998
Electronics Research Laboratory
University of California, Berkeley
Overview of ONR UCAV Project
2
ONR N00014-97-1-0946
Research Objective and Research Thrusts
Research Objective: Design and evaluation of intelligent control architectures for UCAV’s
Research Thrusts:
Intelligent control architectures for coordinating UCAV’s
Verification and design tools for intelligent control architectures
Perception and action hierarchies for vision-based control and navigation
3
ONR N00014-97-1-0946
Project Concept
Central control paradigm (optimization of system-wide mission objectives) breaks down when dealing with distributed multi-agent systems
Real-world environments are complex, spatially extended, dynamic, stochastic and largely unknown
Autonomous intelligent systems in real-world environments require
– sensory and control functions• based on system decomposition based on hierarchical hybrid, and multi-
agent designs using multiple levels of abstraction
– structural and parametric learning methods• to adapt to initially unknown environments
– generalized estimation methods, uncertainty management and robust control techniques
• to deal with residual uncertainty in stochastic, partially observable environments
4
ONR N00014-97-1-0946
Project Concept
Real-time decision making is achieved by– parallelism– reflexive control– compilation– anytime approximation
Hierarchical perception and control paradigm– architectural fusion of the central control paradigm with
autonomous intelligent systems Distributed intelligent systems
– hierarchical or modular to control complexity– globally organized emergent behavior– robust, adaptive and fault tolerant and degraded modes of
operation– architectural organization involving the use of compositionality
5
ONR N00014-97-1-0946
Technology Drivers
Intelligent Multi-Agent Systems
The need for a theoretical framework for an integrative approach arises from advances in computation, communication, intelligent materials, visualization and other technologies which make it possible to expect more from a multi-agent system, than a centralized control framework.
6
ONR N00014-97-1-0946
Intelligent Multi-Agent Systems
Unmmaned Autonomous Vehicles Distributed Command and Control Simulated Battlefield Environment Decision Support Aids for Human Centered Systems Automatic Target Recognition Robust and Fault tolerant Systems Distributed Communication Systems Distributed Power systems Intelligent Vehicle Highway systems Air Traffic Management Systems Intelligent Telemedical Systems
7
ONR N00014-97-1-0946
Berkeley Team
SASTRY: Specializes in decentralized control of distributed systems and hybrid design and verification techniques, with applications to automated highway systems, air traffic management systems and robotics.
MALIK: A leader in low-level and intermediate vision, with recent work in crucial aspects of image segmentation, association, grouping and attribute evaluation.
SENGUPTA: Experience in observation and control for distributed systems. Extensive background in discrete event and hybrid systems. Application to transportation and communication problems.
GODBOLE: Hybrid control of multi-agent systems. Extensive background in applications to automated highway and air traffic management systems. Inter-agent coordination problems. Design of fault management systems.
LYGEROS. Hybrid control synthesis. Background in automated highway and air traffic management systems. Formal methods for verification of large-scale systems. Fault tolerant control systems.
SHAKERNIA. First-year graduate student in EECS. B.S. (1997) EECS, UCB.

8
ONR N00014-97-1-0946
Theoretical Underpinnings
Architectural design for multi-agent systems– centralization for optimality– decentralization for safety, reliability and speed of response
Perception systems sharing many representations– hierarchical aggregation– wide-area surveillance– low-level perception
Frameworks for representing and reasoning with uncertainty Incorporation of learning, adaptation and fault toperance: parametric
uncertainty with update and adaptation at the continuous levels, learning of new “logical entities”, reinforcement learning at the logical levels and meta-learning for redefining architecture
Soft-computing approaches to intelligence augmentation for human-centered systems: reconciliation of human decision making schemes with machine performance, intelligent agents, keeping the human in the loop, sufficing rather than optimizing
9
ONR N00014-97-1-0946
Research Thrust 1: Intelligent Control Architectures
An architecture design problem is concerned with design of both the observation and control
An architecture design problem for a distributed system begins with specified safety and efficiency objectives and aims to characterize communication, observation and control
Our investigation of the intelligent control architecture design problem is concerned with three formalisms– intrinsic model– supervisory control of discrete event systems– hybrid system formalism
10
ONR N00014-97-1-0946
Research Thrust 2: Verification and Design Tools
Design Mode Verification Faulted Mode Verification Probabilistic Verification
– A rapproachment between stochastic control, Bayesian decision networks and soft computing
– The heart of the approach is to not verify that every run of the hybrid system satisfies certain safety or liveness parameters, rather to check that the properties are satisfied with a certain probabillity, given uncertainties of actuation and sensing
11
ONR N00014-97-1-0946
Research Thrust 3: Perception and Action Hierarchies
Hierarchical Vision
Control Around the Vision Sensor
Surveillance
We are designing a perception and action hierarchy centered around the vision sensor to support the observation and control functions of air vehicles
12
ONR N00014-97-1-0946
Exploration of Hybrid and Intelligent Control Architectures in Conjunction with Probabilistic Verification (ONR N00014-97-1-0946)
Architectures for UCAV and Results on Multi-Agent Coordination
Raja Sengupta and Datta Godbole
ONR Project Review, February 24-25, 1998
Electronics Research Laboratory
University of California, Berkeley
13
ONR N00014-97-1-0946
Outline
Research Thrusts
– Hierarchical UCAV Architecture Design
– Design of Decentralized Observation, Communication and Control for Discrete Event Systems
• Application to Fault Detection and Identification
– Distributed hybrid control for multi-agent systems

14
ONR N00014-97-1-0946
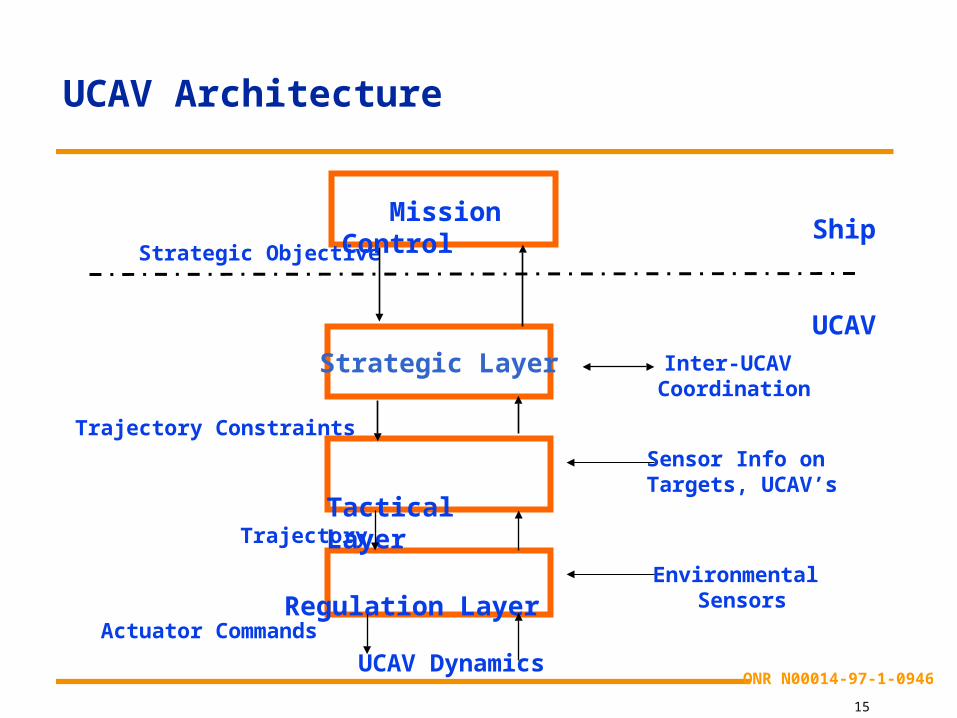
UCAV Architecture
A group of UCAV’s are a coordinating multi-agent system with limited centralized control– mobile communication systems support coordination– due to limitations on computing and communication
resources the UCAV’s must cooperatively and individually exhibit a high degree of autonomy
– low bandwidth, asynchronous, event-driven coordination is preferred to synchronous, time-driven coordination
A single UCAV is a real-time embedded system The architecture should specify observation and control
semantics at each layer– the layers should be consistent and programmable
15
ONR N00014-97-1-0946
UCAV Architecture
Strategic Layer
Mission Control
Tactical Layer
Regulation Layer
Strategic ObjectiveShip
UCAV
Inter-UCAV Coordination
Trajectory Constraints
Sensor Info on Targets, UCAV’s
Environmental Sensors
Trajectory
Actuator Commands
UCAV Dynamics
16
ONR N00014-97-1-0946
Preliminary UCAV Architecture
Regulation– control of UCAV actuators
• fully autonomous
Tactical– safe and efficient trajectory generation and mode control
• fully autonomous
Strategic– trajectory constraints, UCAV to UCAV/ship coordination,
weapons configuration, fault management Central Mission Control
– mission planning, resource allocation, mission emergency response, mission optimization, pilot interface
17
ONR N00014-97-1-0946
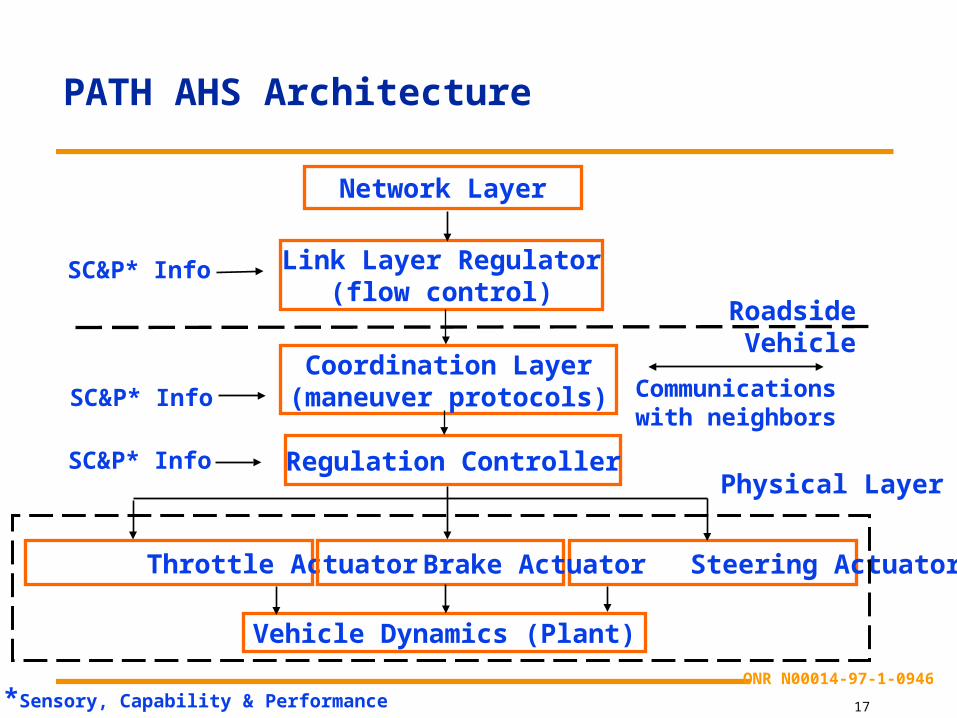
PATH AHS Architecture
Network Layer
Link Layer Regulator(flow control)
Roadside Vehicle
Coordination Layer(maneuver protocols)
Regulation Controller
Throttle Actuator Steering Actuator Brake Actuator
Vehicle Dynamics (Plant)
Physical LayerSC&P* Info
*Sensory, Capability & Performance
SC&P* Info
SC&P* Info
Communicationswith neighbors
18
ONR N00014-97-1-0946
Example: AHS Architecture
The layers are consistent and programmable
Coordination
– Synchronous, time-driven for platoon stability (regulation)
– Asynchronous, event-driven for maneuvers (coordination)

19
ONR N00014-97-1-0946
Decentralized Observation, Communication, Control for Multi-agent Systems
Given a strategic objective and local observation what is the information exchange with the mothership and other UCAV’s required to command tactical control ?– Given a distributed control problem and the local
observation at each site, what is the inter-site communication (minimal) or coordination protocols required to solve this problem ?
Given a system mission what is the strategic objective (possibly dynamic) of each UCAV ?– How to distribute among the available agents a specified
centralized control problem ?
20
ONR N00014-97-1-0946
Literature: Distributed Control with Decentralized Information
Decentralized control of large-scale systems– linear systems, time-driven, design for stability
Stochastic scheduling– queuing networks, time-driven, design for performance
Distributed control of discrete event systems– event driven, design for correctness, safety
Distributed control of hybrid systems– time and event-driven, design for correctness, safety
21
ONR N00014-97-1-0946
Communication and Control Synthesis for DES
Symbolic representation of system actions (events)
Behavior is a causal ordering of symbols (event trace)
Objective: – Given a DES plant model, specification of the control
objective, local observation and control capability, synthesize a minimal inter-agent communication and the control law of each agent.
22
ONR N00014-97-1-0946
Communication and Control Synthesis for DES
Advantages:– Will synthesize symbolic, event-driven, inter-agent
communication over a finite message set – Very simple models permitting logical or combinatorial
analysis and insights– AHS Example: Worked for most coordinating maneuvers
other than stability properties for vehicle following. Limitation: No formal way to capture continuous dynamics
– The semantics of an event is generally some alignment or safety conditions in velocity, position, and euler angles with respect to targets or other agents
– Distributed control of hybrid systems
23
ONR N00014-97-1-0946
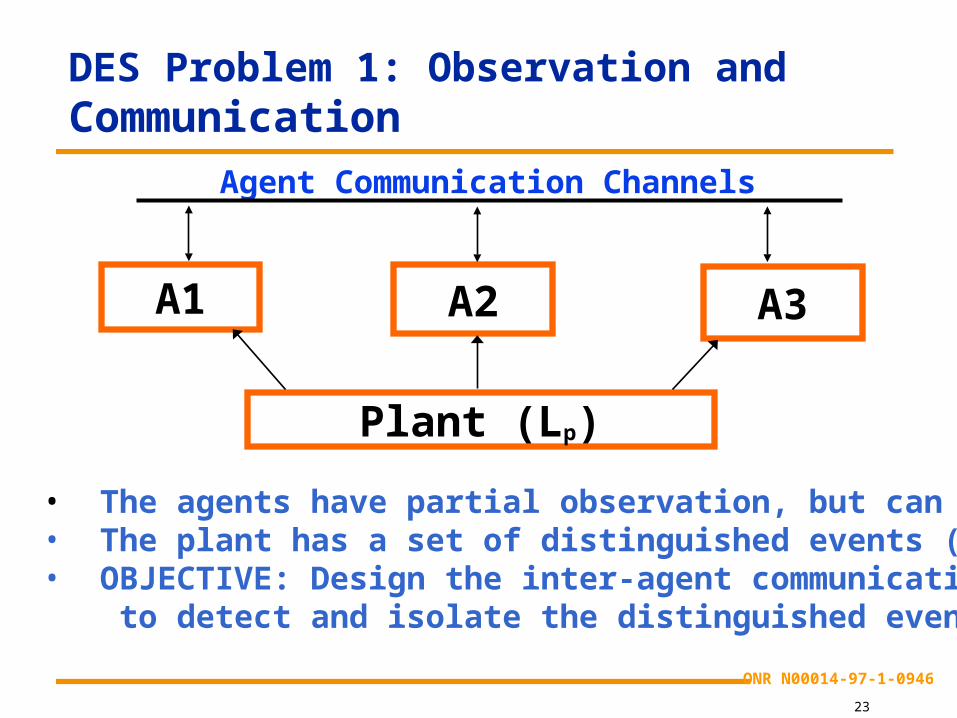
DES Problem 1: Observation and Communication
Agent Communication Channels
A1 A2 A3
Plant (Lp)
• The agents have partial observation, but can exchange messages • The plant has a set of distinguished events (failures) • OBJECTIVE: Design the inter-agent communication scheme required to detect and isolate the distinguished events
24
ONR N00014-97-1-0946
DES Problem 1: Observation and Communication Only
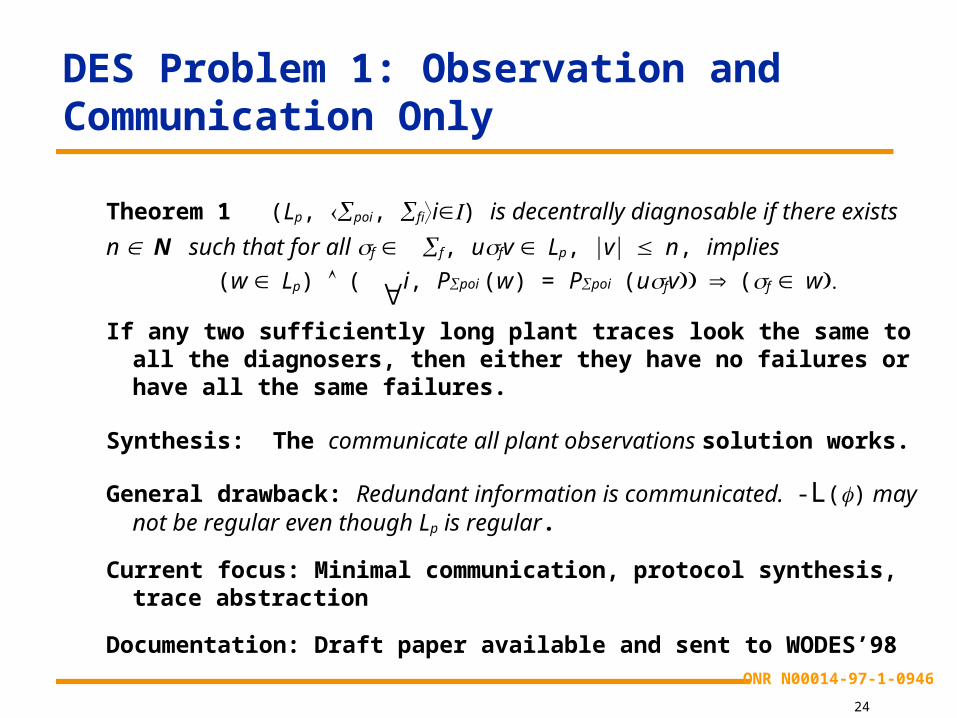
Theorem 1 (Lp, poi, fii) is decentrally diagnosable if there exists
n N such that for all f f, ufv Lp, vn, implies
(w Lp) ( i, Ppoi (w) = Ppoi(ufv(f w
If any two sufficiently long plant traces look the same to all the diagnosers, then either they have no failures or have all the same failures.
Synthesis: The communicate all plant observations solution works.
General drawback: Redundant information is communicated. -L() may not be regular even though Lp is regular.
Current focus: Minimal communication, protocol synthesis, trace abstraction
Documentation: Draft paper available and sent to WODES’98

25
ONR N00014-97-1-0946
DES Problem 2: Control, Observation, and Communication
Each agent has a set of controllable events The controllable events are a subset of the set of
observable events The next event is either an uncontrollable event from the
plant, a controllable event enabled by an agent, or a message event scheduled by an agent
Control objective is specified by a language Researching the existence and synthesis of coordination
protocols
26
ONR N00014-97-1-0946
Distributed Control and Communication of Hybrid Systems
Symbolic and flow representation of system actions Game/Team-theoretic approach to synthesis
– Agents play as a team against a non-cooperative target• Characterize the saddle disturbance in the team-target game
• Use the saddle disturbance to formulate and solve an optimal control problem to characterize the saddle team strategy
• Derive the inter-agent communication and individual agent control from the necessary conditions
Theorem: If for an initial state the worst disturbance is independent of the team control then the target-team game has a saddle solution
27
ONR N00014-97-1-0946
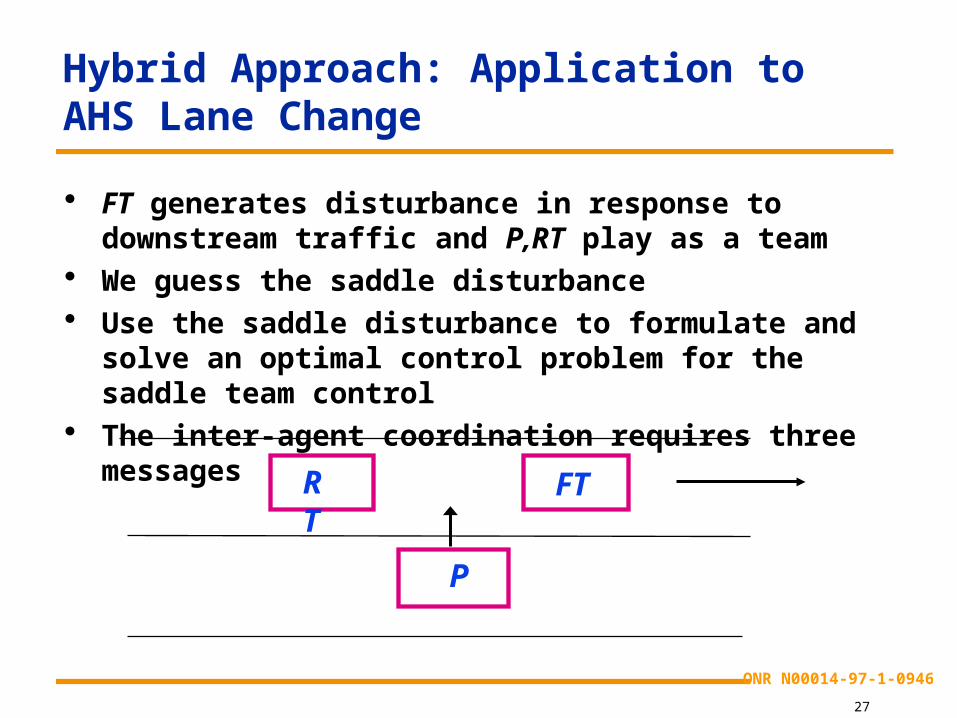
Hybrid Approach: Application to AHS Lane Change
FT generates disturbance in response to downstream traffic and P,RT play as a team
We guess the saddle disturbance Use the saddle disturbance to formulate and solve an
optimal control problem for the saddle team control The inter-agent coordination requires three messages
P
FTRT

28
ONR N00014-97-1-0946
Summary
Developed a preliminary UCAV architecture– UCAV to UCAV and UCAV to ship coordination– Hierarchical control and observation
Focused theoretical research efforts on – Sensing, Control, and Communication for Distributed
Multi-agent Systems– Failure Detection and Identification– Design of Hybrid and Decentralized Control Systems– Current Results
• Existence and synthesis of inter-agent communications for partially observed distributed discrete event systems
• Synthesis of safe hybrid control laws for distributed hybrid systems using game theory and optimal control
29
ONR N00014-97-1-0946
Quick Time Movie of Helicopter Flight


















