1 On the Existence of Form- Closure Configurations on a Grid A.Frank van der Stappen Presented by K....
40
1 On the Existence of Form-Closure Configurations on a Grid A. Frank van der Stappen Presented by K. Gopalakrishnan
-
date post
21-Dec-2015 -
Category
Documents
-
view
224 -
download
5
Transcript of 1 On the Existence of Form- Closure Configurations on a Grid A.Frank van der Stappen Presented by K....

1
On the Existence of Form-Closure Configurations on a Grid
A. Frank van der Stappen
Presented by K. Gopalakrishnan

2
• Inspiration
• Introduction
• Form Closure on a Grid
• Extensions
• Conclusion
Outline

3
• Modular fixturing
• Existence of Fixtures– [Zhuang, Goldberg, 96]
• Purely geometric approach
Inspiration

4
• Inspiration
• Introduction & Related Work
• Form Closure on a Grid
• Extensions
• Conclusion
Outline

5
Ways to hold parts
• Form Closure– Any part motion causes
collision
• Force Closure– Any external Wrench resisted
by applying suitable forces
[Mason, 2001]
6
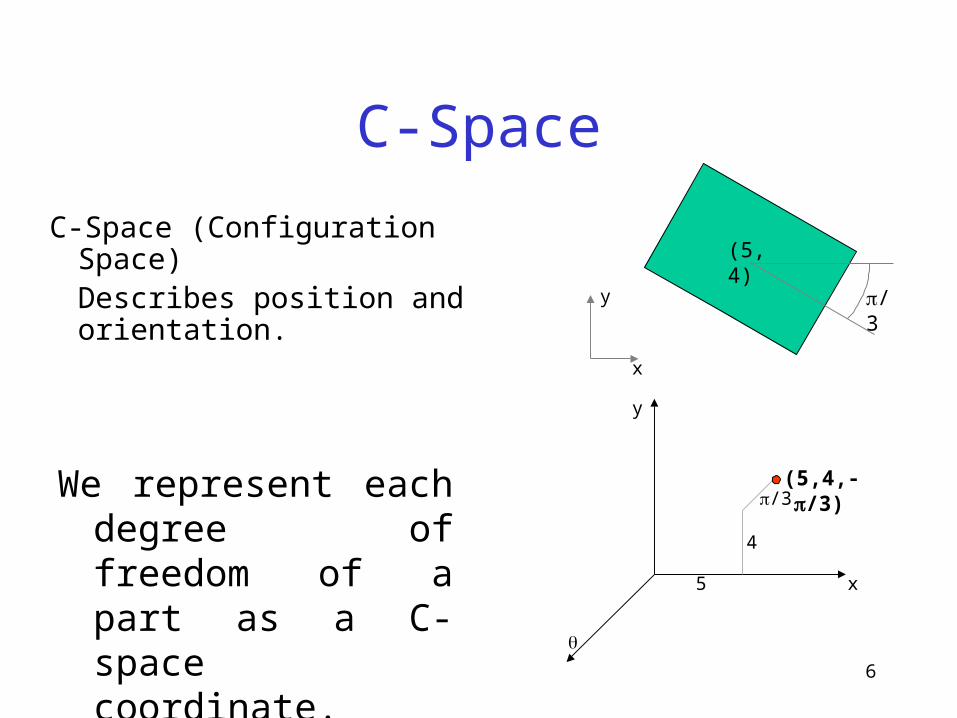
C-Space
C-Space (Configuration Space)Describes position and orientation.
We represent each degree of freedom of a part as a C-space coordinate.
y
x
/3
(5,4)
y
x
4
5
/3(5,4,-/3)

7
ObstaclesObstacles prevent parts from moving freely.
These images of obstacles in C-space are called C-obstacles.
The rest is Free Space.

8
Form Closure
Form Closure:
All adjacent points are collisions
Difficult to Determine.Hence, distance from C-obstacles is used. [Rimon & Burdick, 96]
9
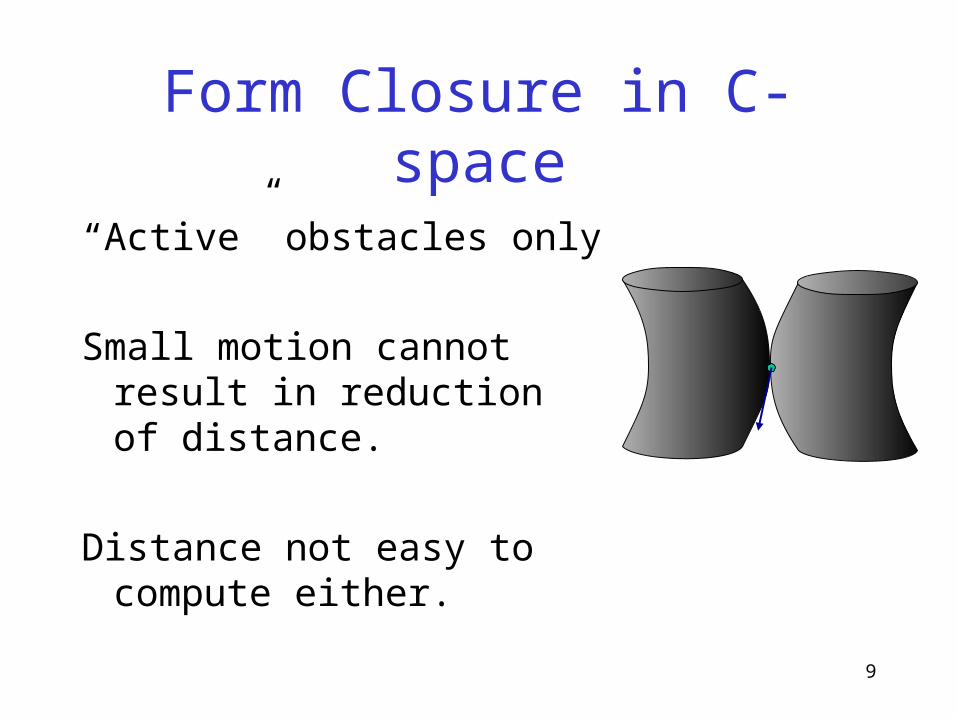
Form Closure in C-space
“Active” obstacles only
Small motion cannot result in reduction of distance.
Distance not easy to compute either.

10
First order Form-Closure• Consider Infinitesimal motion.
• Taylor Expansion for distance.
• Truncate to First order.
• Equivalent to replacing surfaces by tangents.

11
First order Form-Closure
In n dimensions there are n(n+1)/2 DOF. n translations n(n-1)/2 rotations
For first order form-closure, n(n+1)/2+1 are necessary and sufficient– [Realeaux, 1963]
– [Somoff, 1900]
– [Mishra, Schwarz, Sharir, 1987]
– [Markenscoff, 1990]

12
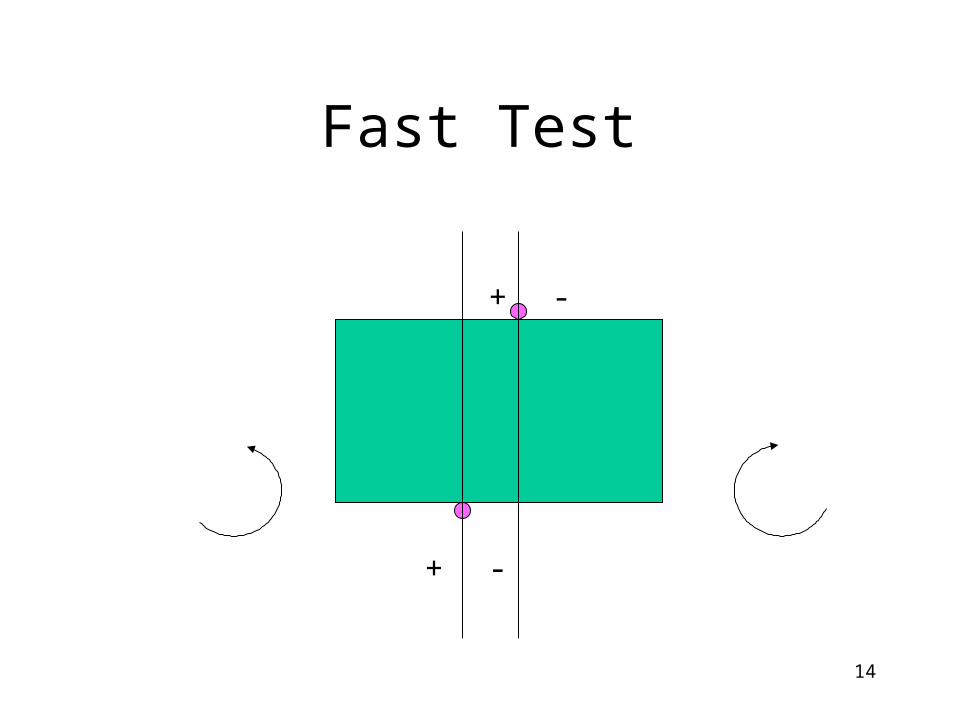
Fast Test for First OrderForm-Closure
• Any infinitesimal motion on the plane is a rotation.
• No center of rotation possible for a part in Form-Closure.
• Try to identify possible centers.

13
Fast Test
+ -
14
Fast Test
+ -
-+

15
Fast Test
+ -
-+

16
Fast Test
+ -
-+
++-
-

17
Failure of First order Form-Closure
Higher order terms neglected.
Uncertainty when first order term is 0.
We need to look at Second order terms.
For generic parts in 2 or 3 dimensions, 3 or 4 point contacts are sufficient. [Rimon, Burdick, 1995]

18
Second Order Form-Closure
Example: 1st order approximation:

19
Second order Form-Closure
First order approximation allows a pure rotation about the centroid.
20
• Inspiration
• Introduction
• Form Closure on a Grid
• Extensions
• Conclusion
Outline

21
Problem Definition
• Rigid polygonal part.
• Frictionless point contacts.
• No parallel edges.
To prove that:
The part can be held in form-closure by 4 point-contacts that lie on 2 perpendicular lines.
22
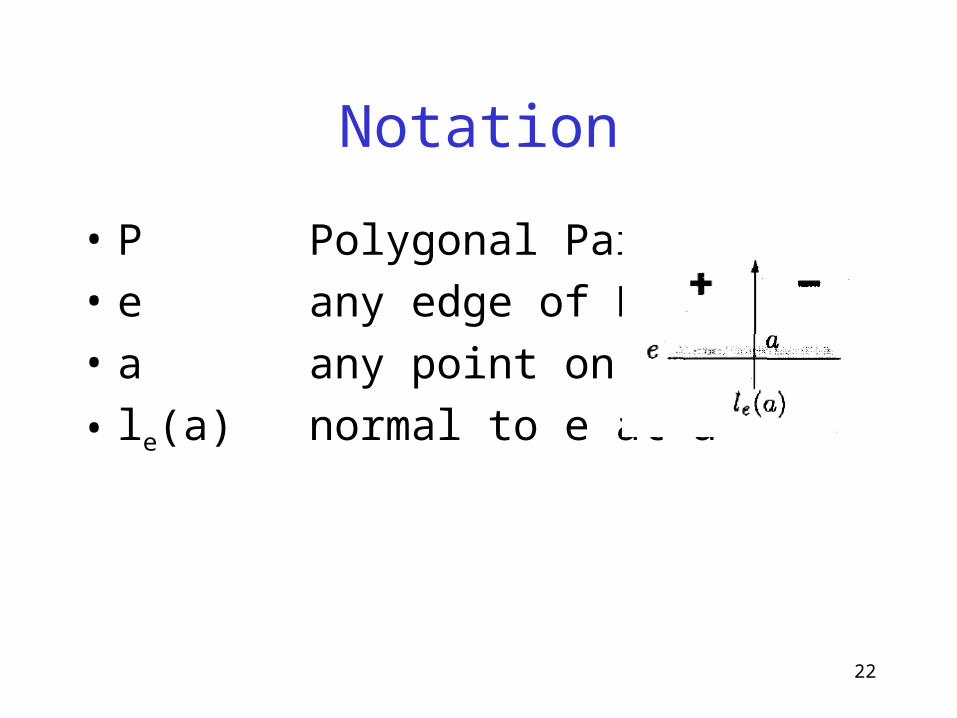
Notation
• P Polygonal Part
• e any edge of P
• a any point on e
• le(a) normal to e at a

23
Proof
• Consider the largest inscribed circle C in P.
• C has center m
• Let this touch the part at a1, a2, a3.
a1 a2
a3
m

24
Proof
• 3 radial vectors positively span R2.
• m only possible center of rotation.
• Contacts obtained in neighborhood of ai.
a1 a2
a3
m

25
Case I
• At least 1 ai is a vertex.
• Has to be Concave.
a1 a2
a3
m

26
Case I
• If no normal at vertex passes thru m, we are done
a1 a2
a3
m

27
Case I
• If a normal at the vertex passes through m,
a1 a2
a3
m

28
Case I

29
Case II
• All 3 contacts at edges.
• Again, m is the only possible
• Let the least angle between radii be between ma1 and ma3.
• We choose a4 to make a1a4 and a2a3 gridlines.

30
Case II-1
• m is to the left of normal at a4.
• Move the horizontal line slightly upward.

31
Case II-2
• m is to the right of normal at a4.
• Rotate both axes by equal angles.
32
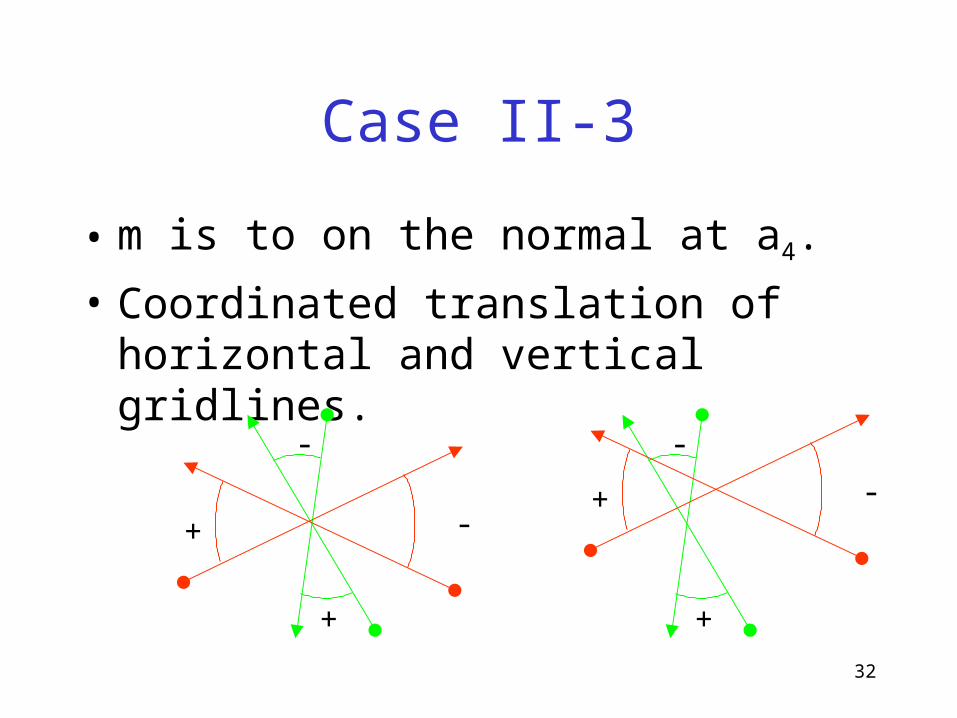
Case II-3
• m is to on the normal at a4.
• Coordinated translation of horizontal and vertical gridlines.
+
-
+ -
+
-
+ -

33
• Inspiration
• Introduction
• Form Closure on a Grid
• Extensions
• Conclusion
Outline

34
Parallel Edges
• Counterexamples.
• Topology not maintained.
35
Contact at Grid Vertex
• Not feasible (e.g. convex polygons).
• Additional contact on another line required.
• Feasibility not guaranteed.
• Requires large enough part.
36
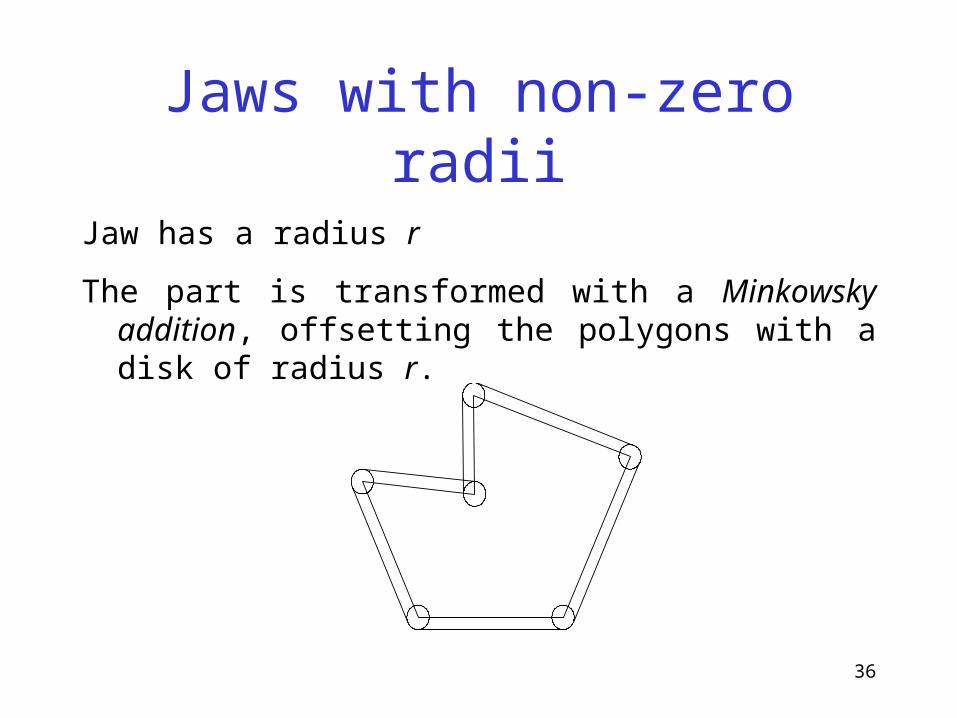
Jaws with non-zero radii
Jaw has a radius r
The part is transformed with a Minkowsky addition, offsetting the polygons with a disk of radius r.

37
Jaws with non-zero radii
• Contact at Convex vertex not desired.
• As radius increases, Minkowsky sum becomes disc.
38
• Inspiration
• Introduction
• Form Closure on a Grid
• Extensions
• Conclusion
Outline

39
Conclusion
• Existence of solution proved under assumptions.
• Validity of assumptions shown.
• Non zero radius incorporated.
• Extension to non-polygonal parts open.
• Accessibility to clamps ignored.

40


![Gopalakrishnan, Ganesh [mailto:ganesh@oida.org] Sent ...](https://static.fdocuments.net/doc/165x107/6239cdb641b6f806ee3e7613/gopalakrishnan-ganesh-mailtoganeshoidaorg-sent-.jpg)