1 Multiscale Plasticity : Dislocation Dynamics H.M. Zbib, Washington State University\ tata...
40
1 Multiscale Plasticity : Dislocation Dynamics H.M. Zbib, Washington State University\ -10000 -5000 0 5000 10000 V3 -5000 -2500 0 2500 5000 V1 -5000 0 5000 V2 Effective PlasticStrain (% ) 0.253197 0.174073 0.094949 0.0158248 t a dislocations cracks penny-shaped cracks U a V
-
Upload
brice-cook -
Category
Documents
-
view
244 -
download
0
Transcript of 1 Multiscale Plasticity : Dislocation Dynamics H.M. Zbib, Washington State University\ tata...

1
Multiscale Plasticity : Dislocation Dynamics H.M. Zbib, Washington State University\
-10000
-5000
0
5000
10000
V3
-5000-2500
02500
5000 V1
-5000
0
5000
V2
Effective Plastic Strain (%)
0.2531970.1740730.0949490.0158248
ta
dislocations
cracks
penny-shaped cracks
Ua
V

2
ContentsContents
1. Basic Geometry: Identification of Slip geometry (bcc), Discretization of dislocation curves
2. Equation of Motion: Glide, climb, cross-slip, multiplication
3. Long Range Stress Field and Driving Force
4. Short-range interactions
5. Boundary Conditions: periodic, reflected, free, etc..
B. Basic Structure of Dislocations Dynamics
C. Numerical issues: • Long-range Interactions: Superdislocations vs FEM• Time step and Segment length
D. Critical Issues _Examples
E. Movie (Typical simulations)
A. Basic Structure of The multi-scale model of Plasticity 1. Representative Volume Element: Inhomogeneous; homogeneous 2. Basic laws of continuum mechanics 3. Constitutive Laws: Connection with Dislocation Dynamics4. The Finite Element formulation5. Boundary Conditions: Dislocation-Boundary Interaction6. Extension to Heterogeneous materials

3
DSSST
Internal stress (caused by defects)
External Stress
pDee
Elastic strain caused by external stress
Elastic stress caused by internal defects
Inelastic strain
dvSD )(xV elementelement
DD 1

4
Dp SCS : Hooke’s Law:
Momentum: vSdiv pS.ε TkTcv
2Energy:
peo
ε-ε C= S S + S -SSo
pW -W=
Rate form

5
Interaction with External free surfaces:
The solution for the stress field of a dislocation segment is known for the case of infinite domain and homogeneous materials, which is used in DD codes. Therefore, the principle of superposition is employed to correct for the actual boundary conditions, for both finite domain and homogenous materials. ta
dislocations
cracks
penny-shaped cracks
Ua
V
t
V
ta-t
*
*uuu
SSS *

6
Internal surfaces:
Internal surfaces such as micro-cracks and rigid surfaces around fibers, say, are treated within the dislocation theory framework, whereby each surface is modeled as a pile- up of infinitesimal dislocation loops. Hence defects of these types are all represented as dislocation segments and loops, and there interaction with external free surfaces follows the method discussed above.

7
FE Formulations:
dvBCBK eT
V
s
aa dsNtf
s
II dsNtf
v
DB dvBSf
v
PeP dvBCf
Image stresses
Applied stress
Internal stress: Long range interactions
Shape Change
Stiffness Matrix
PBa ffffUKUM
TTT fTKTC

8
Extension to Inhomogeneous Materials and interfaces
1
2
T
1
2
T-T
1
12
2*
1*
**
CCS
"2" in,SCS
"1" inCS
uuuSSS
ˆ
ˆ
,
,
*
*
T1
Infinite domain with properties of material“1”
“Eigenstress”Elastic Strain field in domain“2” caused by dislocations in Domain “1” (infinite-domain solution)
9
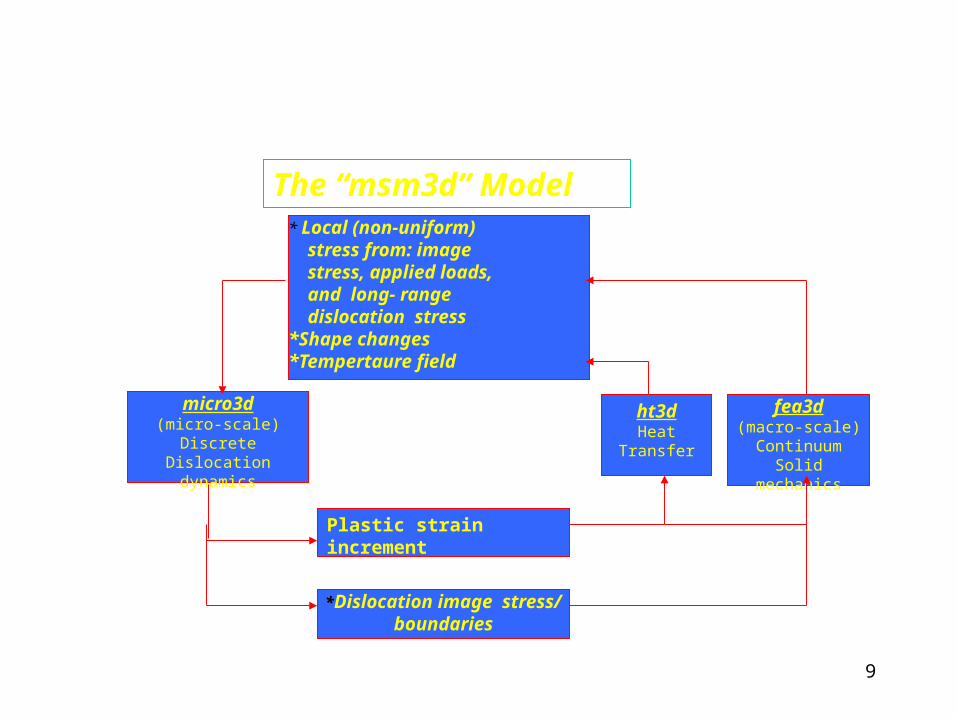
micro3d(micro-scale)
Discrete Dislocation dynamics
fea3d(macro-scale)
Continuum Solid mechanics
*Dislocation image stress/ boundaries
* Local (non-uniform) stress from: image stress, applied loads, and long- range dislocation stress*Shape changes*Tempertaure field
Plastic strain increment
ht3dHeat Transfer
The “msm3d” Model
10
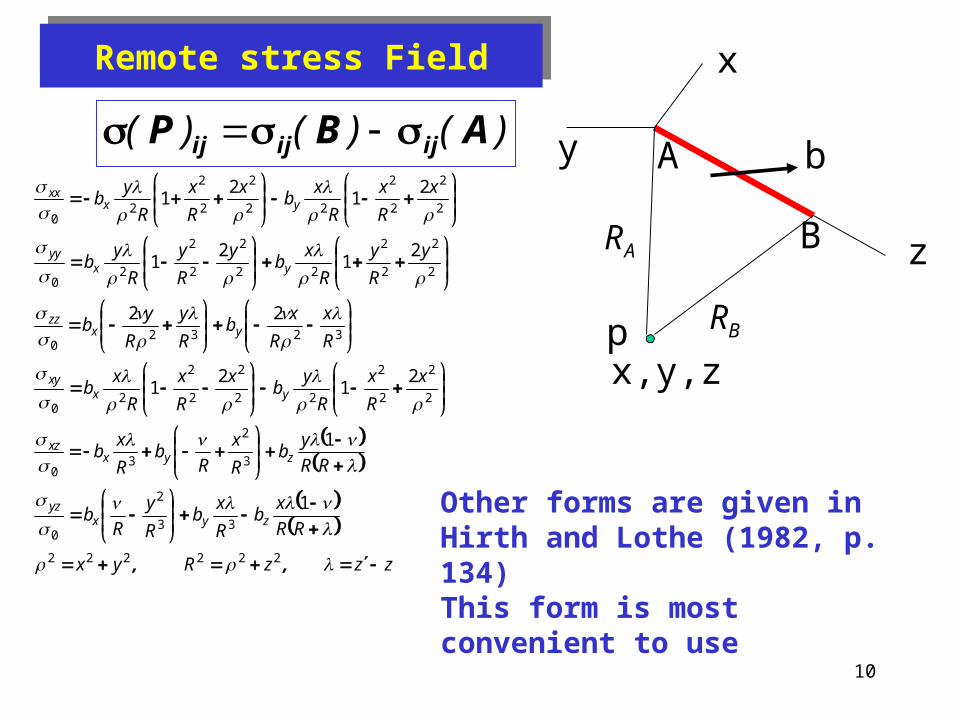
z
x
y A
B
b
x,y,zp
)()()( ABP ijijij
zzzRyx
RR
xb
R
xb
R
y
Rb
RR
yb
R
x
Rb
R
xb
x
R
x
R
yb
x
R
x
R
xb
R
x
R
xb
R
y
R
yb
y
R
y
R
xb
y
R
y
R
yb
x
R
x
R
xb
x
R
x
R
yb
zyxyz
zyxxz
yxxy
yxzz
yxyy
yxxx
,, 222222
33
2
0
3
2
30
2
2
2
2
22
2
2
2
20
32320
2
2
2
2
22
2
2
2
20
2
2
2
2
22
2
2
2
20
1
1
21
21
22
21
21
21
21
Other forms are given in Hirth and Lothe (1982, p. 134)This form is most convenient to use
RA
RB
Remote stress FieldRemote stress Field

11
3D Discrete Dislocation Dynamics3D Discrete Dislocation Dynamics
)nbbn( iiip
i
N
i
gii
V
vl
1 2
)nbbn(W iiip
i
N
i
gii
V
vl
1 2
ii vm *F
t
v
dv
dW
vm
1*
Equation of Motion
Effective Mass
12
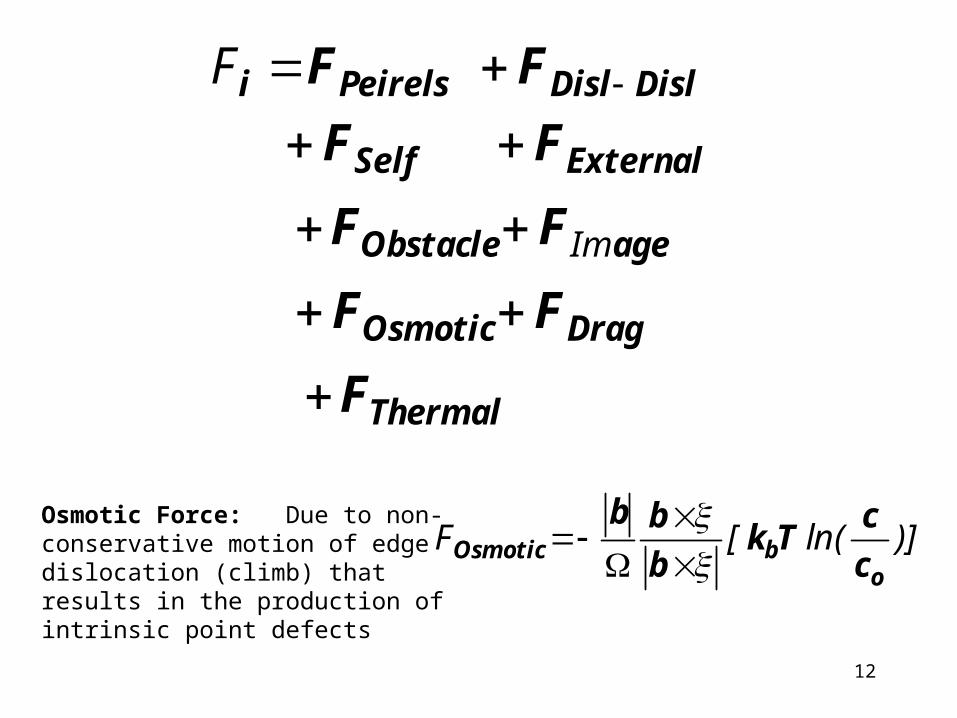
Thermal
DragOsmotic
ageObstacle
ExternalSelf
DislDislPeirelsi
F
FF
FF
FF
FF
Im
F
Osmotic Force: Due to non-conservative motion of edge dislocation (climb) that results in the production of intrinsic point defects
)]ln([Fo
bOsmotic c
cTk
b
bb

13
kT
F
kT
D
a
bhM kk
g
-exp
2 2
Double-Kink Theory(bcc: Low mobility)
Viscous Phonon and Electron damping
MB Tg
1
( )
fcc: High mobilitye.g AL: 1410 sPa.
Urabe and Weertman (1975)

14
Thermal Force - SDD: Stochastic Dislocation Dynamics
• Equation of motion of a dislocation segment of length Dl with an effective mass density m* (Ronnpagel et al 1993, Raabe et al 1998):
• the stochastic stress component t satisfies the conditions of ensemble averages
0)( tτ
• The strength of t is chosen from a Gaussian distribution with the standard deviation of
tlbBkT 22
T
10K 2 = 8.11MPa = 11.5 MPa
50 5 28.7 40.6
100 10 57.4 81.1
300 30 181 256 For Cu with = 50 fs
tlmbBkTttt 2*22)()( ττ
B bl 10 bl 5sPa.
t
iiThermal b τF

15
0
100
200
300
400
500
600
700
0 50 100 150 200t (ps)
Tk (
K)
SDD: Fluctuation of Kinetic Temperature
• Pinned dislocation with initial velocity = 0 m/s
• Total dislocation length = 2000 b & segment length =10b
• System temperature = 300 K, w/o applied stress
22
2KBTk
DOFMv

16
I. Basic Geometry (bcc)I. Basic Geometry (bcc)
Simulation Cell(5-20 )
[100] [010]
[001]
Slip plane
(101)
m b
Initial Condition: Expected outcome!*Random distribution Mechanical properties (yield stress, (dislocation, Frank-Read hardening, etc..). Pinning points (particles) Evolution of dislocation structures*Dislocation structures Strength, model parameters, etc..
Discrete segmentsof mixed character
“Continuum” crystal

17
Nodes and collocation points on dislocation loops and curves
“1”
“3”
P
Rjpj
j+1
j-1
dl’
C1
C2
C3
i
i+1
i-1i-2
jj+1
“2”
vj+1
vj
v
Field point
Velocity vector
Long-range Stress field
kC
2
iαβ
βαi
3
imkm
α2
iCimβmβ
2
iCimαmαβ
xdRx
δxxx
Rb
ν)π(14
G
xdRx
bπ8
GxdR
xb
π8
G)(σ
p
18
}
{
k2
iαβ
βαi
3
imkm
α2
iimβmβ
2
iimαmαβ
xdRx
δxxx
Rb
ν)π(14
G
xdRx
bπ8
GxdR
xb
π8
G)(σ
1
111
1
j
j
j
j
j
j
n
jLoopsallp
N
j
Djjp
11,)(
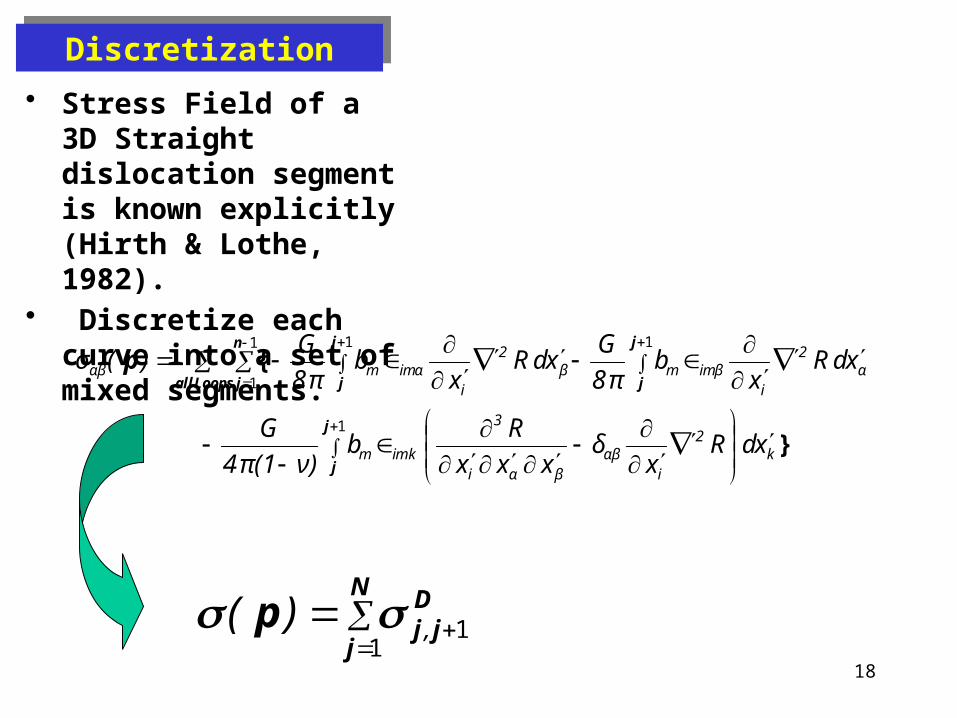
• Stress Field of a 3D Straight dislocation segment is known explicitly (Hirth & Lothe, 1982).
• Discretize each curve into a set of mixed segments.
DiscretizationDiscretization

19
z
x
y A
B
b
x,y,zp
)()()( ABP ijijij
zzzRyx
RR
xb
R
xb
R
y
Rb
RR
yb
R
x
Rb
R
xb
x
R
x
R
yb
x
R
x
R
xb
R
x
R
xb
R
y
R
yb
y
R
y
R
xb
y
R
y
R
yb
x
R
x
R
xb
x
R
x
R
yb
zyxyz
zyxxz
yxxy
yxzz
yxyy
yxxx
,, 222222
33
2
0
3
2
30
2
2
2
2
22
2
2
2
20
32320
2
2
2
2
22
2
2
2
20
2
2
2
2
22
2
2
2
20
1
1
21
21
22
21
21
21
21
Other forms are given in Hirth and Lothe (1982, p. 134)This form is most convenient to use
RA
RB
Remote stress FieldRemote stress Field

20
x
y
z
Identification of basic geometryIdentification of basic geometry
For each node identify:• Coordinates, • Burgers vector• slip plane index • neighboring nodes (k & j) • Node type (free, fixed, junction, jog,
boundary,etc.
“Basic Unit”
i(x,yz)
j
k
b

21
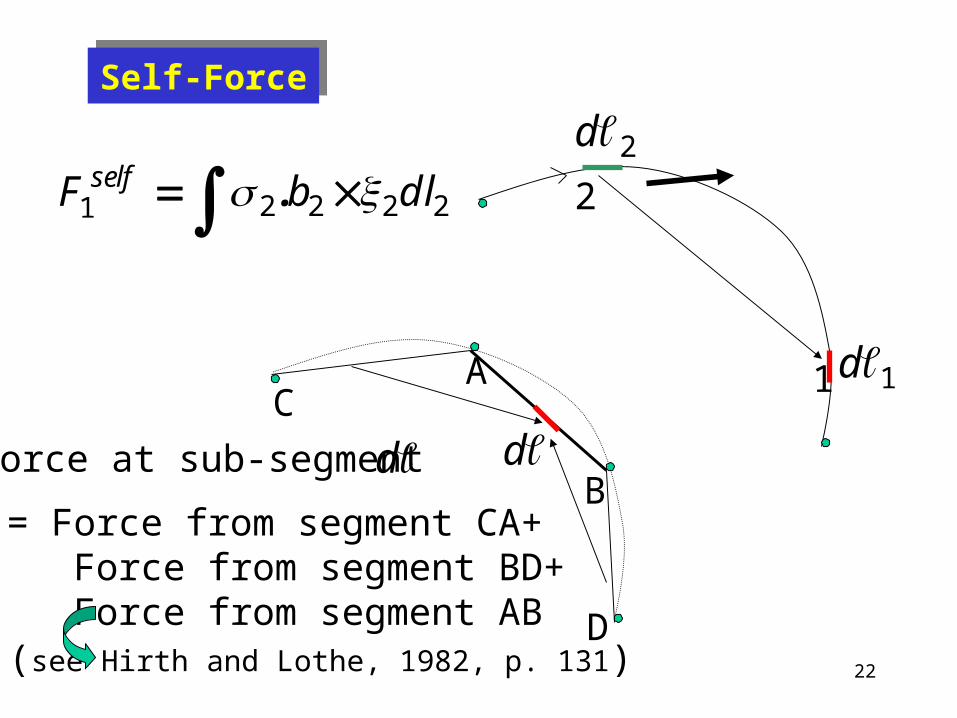
Self-force and Peach-Koehler Force at Dislocation Nodes
bi
i
Fi
i
22
1d
2d
22221 dlbF self . 2
1C
A
B
D
dForce at sub-segment d
= Force from segment CA+ Force from segment BD+ Force from segment AB
(see Hirth and Lothe, 1982, p. 131)
Self-ForceSelf-Force

23
CA
B
D
gF
DCAB
BDBACAg
FFbL
bfL
bfF
cossin
,,
211
14
44
A
ABb
zx
B
Explicit expression
Self-Force per unit lengthSelf-Force per unit length

24
1
1
1
1
ABz
CAx
A
AABy
CAy
ABx
CAx
ABz
CAzCA
bb
bbbbbbfsin
cos
Average force per unit length :
DCBDBACAg FF
Lnbfbf
LF
,,4
Cut-off parameter; numerical parameterwhich can be adjustedto account for core energy
• Similar expressions are obtained for the normal force.
• These expressions reduce to those given in Hirth and Lothe (1982, p.138) for
e.g.
CAAB bb

25
A
B
b
For pure edge pure screw dislocations, this reduces toe.g.
b
gF
gF
(force per unit length)
L
nL
bFg
4
2
Ln
L
bFg
41
1 2

26
Initial Configuration
x
y
z
Vb
II. Equation of MotionII. Equation of Motion
Nonlinear system of ODE’s
componentglideselfiii
N
j
aDjji
iii Fbvv
.....)(
p)(T,M
1m ,
* 1
11
i=1,…N

27
BCC:4 Burgers vectors, without regard to slip planes 8 possible distinct reactions,
-4 repulsive, 3 attractive, and one annihilation. When slip planes are considered: For the {110} and {112} planes 420 attractive reactions all of which are sessile (Baird and Gale, 1965)
d
A short-range interaction occurs when the distance “d” between two dislocations becomes comparable to the size of the core *annihilation, *formation of dipoles, *jogs, and *junctions.
Detailed investigation of each possible interaction can become very cumbersome
Short Range InteractionsShort Range Interactions

28
1. Critical distance criterion (Essman and Mughrabi, 1979)
Implicitly takes into account the effect of the local fields arising from allsurrounding dislocations.
Criteria for determining interaction:
Rule 1: If c
PK FF and PKF or changes sign as
the segment is advanced, short range interaction is possible provided that local interaction between segmentAB and its closest neighbor CD, CDABF is attractive
A
B
C
D
2. Force-based criterion:

29
Rule 2: If Rule 1 is satisfied and
1CDAB ξ.ξ and 0 CDAB bb (or 1CDAB ξ.ξ and 0 CDAB bb ),
AB and CD will annihilate by either
i. Glide (if they are on the same plane) or
ii. Cross slip (if they are on intersecting planes).
Annihilation
Free nodes
Frank-Read source

30
The probability that two attractive dislocationsform a jog or a junction is implicitly determinedby their interaction forces.
For example, if they were to form a junction, theinteracting segments rotate relative to each otherto align themselves into a configuration moresuitable for junction formation, yielding areduction in the energy.
If not, they form a jog since it is energeticallymore favorable
A
B
C
D

31
Rule 3: If Rule 1 is satisfied, andcjnCDAB with 0 CDAB bb ,
then a junction is formed.Segments AB and CD are combined toform a new segment at the junctionwhose Burgers vector is equal to .bb CDAB
Junction node
Junction
22
21
2bbbb 21
In a crude approximation, this implies that this reaction is energetically favorable.
Example:
bb
in
bb
in
A
B
3111 110
3111 110
[ ] ( )
[ ] ( )
[010]glide plane(100)
32
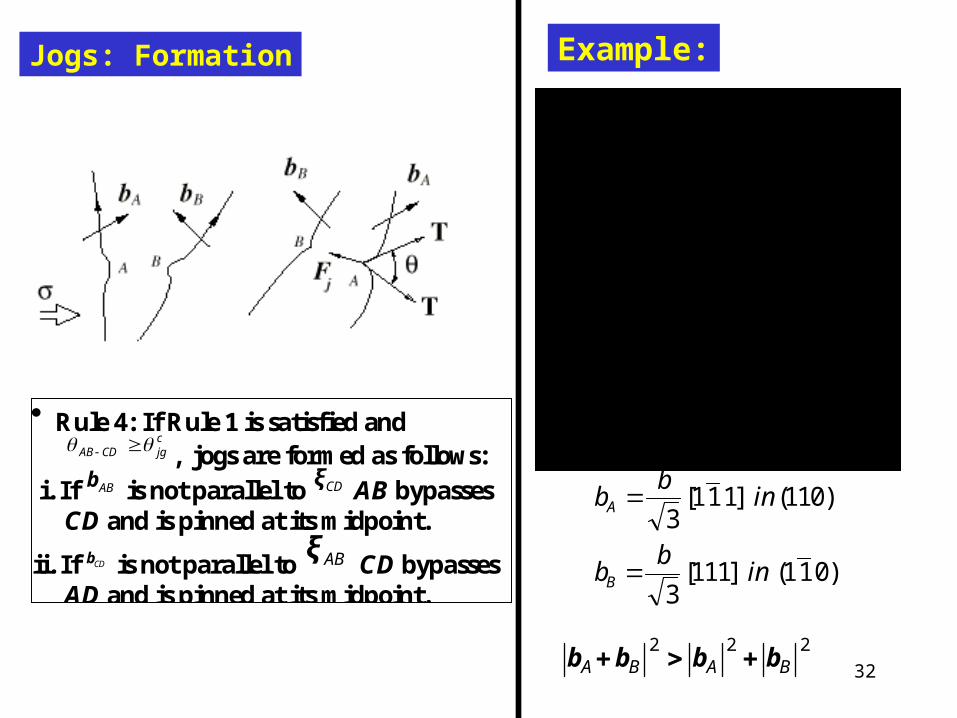
Rule 4: If Rule 1 is satisfied and
cjgCDAB , jogs are formed as follows:
i. If ABb is not parallel to CDξ AB bypasses CD and is pinned at its midpoint.
ii. If CDb is not parallel to ABξ CD bypasses AD and is pinned at its midpoint.
Jogs: Formation Example:
222BABA bbbb
bb
in
bb
in
A
B
3111 110
3111 110
[ ] ( )
[ ] ( )

33
32cos
b
Wvcjgs
ocjgs 120
For Ta:
Rule 5: If cjgsjg the jog moves forward in
the direction of average velocities of
the two adjacent dislocation segments.
Jogs: Motion
• Vacancy or interstitial generating jogs• Line tension approximation
Vacancy or interstitial formation energy

34
Dipole
Dipoles form naturally (numerically) without a need for a “Rule”.
35
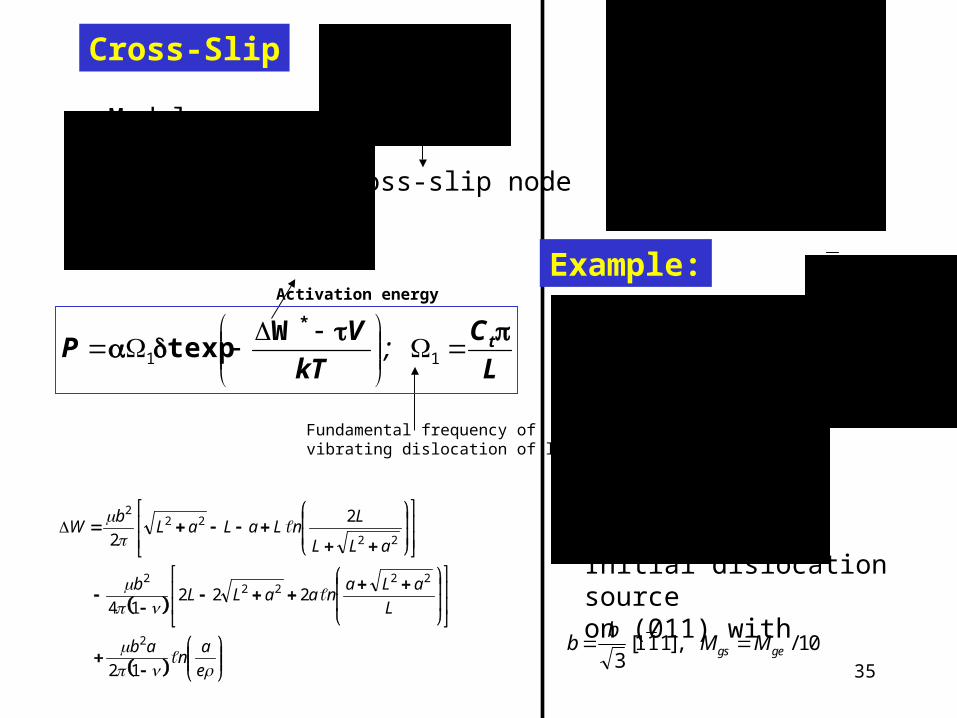
L
C
kT
VP t
11 ;
*Wtexp
Cross-Slip
e
an
ab
L
aLanaaLL
b
aLL
LnLaLaL
bW
12
22214
2
2
2
2222
2
22
222
Model
Activation energy
Cross-slip node
Example:
Initial dislocation sourceon (011) with
bb
M Mgs ge 3
111 10[ ], /
[ ]111 view
Fundamental frequency of vibrating dislocation of length L
36
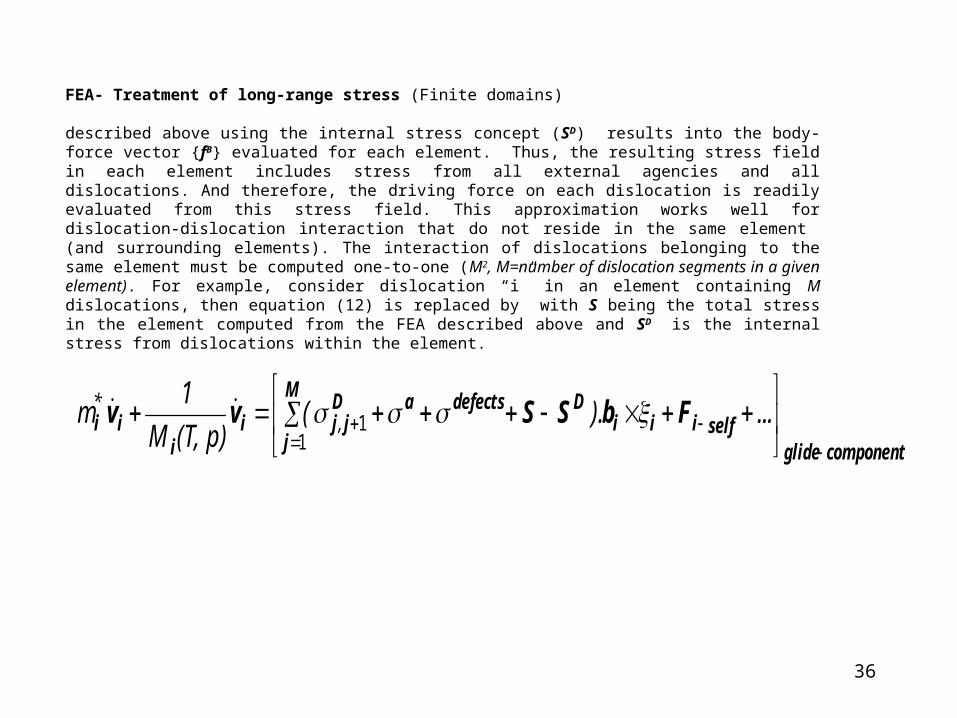
FEA- Treatment of long-range stress (Finite domains)
described above using the internal stress concept (SD) results into the body-force vector {fB} evaluated for each element. Thus, the resulting stress field in each element includes stress from all external agencies and all dislocations. And therefore, the driving force on each dislocation is readily evaluated from this stress field. This approximation works well for dislocation-dislocation interaction that do not reside in the same element (and surrounding elements). The interaction of dislocations belonging to the same element must be computed one-to-one (M2, M=number of dislocation segments in a given element). For example, consider dislocation “i” in an element containing M dislocations, then equation (12) is replaced by with S being the total stress in the element computed from the FEA described above and SD is the internal stress from dislocations within the element.
componentglideselfiii
M
j
DdefectsaDjji
iii FbSSvv
....)(
p)(T,M
1m ,
* 1
1

37
Infinite domainsBoundary conditions: Periodic, reflectedSuperdislocation (Long Range stresses)
Finite Domains: Boundary condition: Free, rigid, interfaces, mixed Image stresses: FEA

38
PZo
Q
A: Main Computational Cell(Grain)B,C, D.: Cells/Grains
C, or D Cell with N Dislocations
P: Dislocationin Cell A
Z
x
y
Main computaional Cell A is surrounded by MxM Cells (41x41)

39
Elements Involved
2.Sample Conditions
Creep – 10-4/s
Quasi-static Strain Rate
High Strain Rate: 103 108/s
rdefect = 1022~1024/m3 T = RT ~ 0.5 Tmelt
1.Defects & Materials
3.Simulation/ Coding Continuum/ Finite
Element Discrete Dislocation
Dynamics Thermal Fluctuations Nonlinearities Geometric Distortions

40
Material parameters
Elastic properties Dislocation Mobility lawCore size = 1b Stacking-fault energy, & activation energy for cross-slip
Numerical Parameters:
DD Cell size (= FE mesh size) Dislocation segment length (min (3b) and max) (variable), number of integration points (10)Number of cells (infinite domain; 3x3x3) Number of sub-cells (elements for FE)time step for DD; Max flight distance (variable time step )Time step for FE (dynamics) ~ (smallest dimension/shear speed)
kT
F
kT
D
a
bhM kk
g
-exp
2 2
MB Tg
1
( )
Double-Kink Theory
(bcc: Low mobility)
Viscous Phonon &
Electron damping