
1 IINNTTRROODDUUCCCCIIÓÓNN
26
2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO 6 1 1 1 . . . I I I N N N T T T R R R O O O D D D U U U C C C C C C I I I Ó Ó Ó N N N 2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO. 2.1. EL PROBLEMA DINÁMICO. 2.2. FORMULACIÓN DE LAS ECUACIONES DEL MOVIMIENTO. 2.3. SISTEMAS DE UN GRADO DE LIBERTAD. 2.4. SISTEMAS DE VARIOS GRADOS DE LIBERTAD. 2.5. SISTEMAS DE PARÁMETROS DISTRIBUIDOS. 3 3 3 . . . D D D E E E F F F I I I N N N I I I C C C I I I Ó Ó Ó N N N “ “ “ I I I N N N S S S I I I T T T U U U ” ” ” D D D E E E L L L A A A E E E S S S T T T R R R U U U C C C T T T U U U R R R A A A 4 4 4 . . . E E E N N N S S S A A A Y Y Y O O O S S S D D D I I I N N N Á Á Á M M M I I I C C C O O O S S S 5 5 5 . . . C C C R R R I I I T T T E E E R R R I I I O O O S S S D D D E E E A A A C C C E E E P P P T T T A A A C C C I I I Ó Ó Ó N N N D D D E E E V V V I I I B B B R R R A A A C C C I I I O O O N N N E E E S S S 6 6 6 . . . M M M O O O D D D E E E L L L I I I Z Z Z A A A C C C I I I Ó Ó Ó N N N D D D E E E L L L A A A E E E S S S T T T R R R U U U C C C T T T U U U R R R A A A 7 7 7 . . . A A A N N N Á Á Á L L L I I I S S S I I I S S S D D D E E E L L L O O O S S S R R R E E E S S S U U U L L L T T T A A A D D D O O O S S S 8 8 8 . . . C C C O O O N N N C C C L L L U U U S S S I I I O O O N N N E E E S S S 9 9 9 . . . R R R E E E F F F E E E R R R E E E N N N C C C I I I A A A S S S B B B I I I B B B L L L I I I O O O G G G R R R Á Á Á F F F I I I C C C A A A S S S 1 1 1 0 0 0 . . . A A A G G G R R R A A A D D D E E E C C C I I I M M M I I I E E E N N N T T T O O O S S S 1 1 1 1 1 1 . . . A A A N N N E E E J J J O O O S S S
Transcript of 1 IINNTTRROODDUUCCCCIIÓÓNN

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
6
111... IIINNNTTTRRROOODDDUUUCCCCCCIIIÓÓÓNNN
2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO.
2.1. EL PROBLEMA DINÁMICO.
2.2. FORMULACIÓN DE LAS ECUACIONES DEL MOVIMIENTO.
2.3. SISTEMAS DE UN GRADO DE LIBERTAD.
2.4. SISTEMAS DE VARIOS GRADOS DE LIBERTAD.
2.5. SISTEMAS DE PARÁMETROS DISTRIBUIDOS.
333... DDDEEEFFFIIINNNIIICCCIIIÓÓÓNNN “““IIINNN SSSIIITTTUUU””” DDDEEE LLLAAA EEESSSTTTRRRUUUCCCTTTUUURRRAAA
444... EEENNNSSSAAAYYYOOOSSS DDDIIINNNÁÁÁMMMIIICCCOOOSSS 555... CCCRRRIIITTTEEERRRIIIOOOSSS DDDEEE AAACCCEEEPPPTTTAAACCCIIIÓÓÓNNN DDDEEE VVVIIIBBBRRRAAACCCIIIOOONNNEEESSS 666... MMMOOODDDEEELLLIIIZZZAAACCCIIIÓÓÓNNN DDDEEE LLLAAA EEESSSTTTRRRUUUCCCTTTUUURRRAAA 777... AAANNNÁÁÁLLLIIISSSIIISSS DDDEEE LLLOOOSSS RRREEESSSUUULLLTTTAAADDDOOOSSS
888... CCCOOONNNCCCLLLUUUSSSIIIOOONNNEEESSS
999... RRREEEFFFEEERRREEENNNCCCIIIAAASSS BBBIIIBBBLLLIIIOOOGGGRRRÁÁÁFFFIIICCCAAASSS
111000... AAAGGGRRRAAADDDEEECCCIIIMMMIIIEEENNNTTTOOOSSS
111111... AAANNNEEEJJJOOOSSS

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
7
2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
En este capítulo de la tesina se realiza una introducción teórica de los principios y
postulados básicos del cálculo dinámico de estructuras que sirve de base para la buena comprensión de la tesina.
El término dinámico puede definirse simplificadamente como variable en el
tiempo por lo que una acción dinámica es aquella que su magnitud, dirección y/o posición varían con el tiempo. De manera similar, la respuesta de una estructura a una acción dinámica, por ejemplo sus esfuerzos, tensiones o desplazamientos, es también variable en el tiempo.
Existen dos aproximaciones básicas posibles para evaluar la respuesta de una
estructura sometida a acciones dinámicas: determinista o no-determinista (aleatoria). La elección de uno u otro método depende en cada caso de cual es el grado de definición de la acción variable. Si la variación en el tiempo de la acción es conocida en su totalidad, aunque ésta presente grandes oscilaciones e irregularidades en su tipología, hablaremos de una acción dinámica prescrita. En este caso, el análisis de la respuesta de un sistema estructural a una acción dinámica prescrita se define como análisis determinista. Por otro lado, si la variación en el tiempo de la acción no es conocida completamente, pero se puede definir o modelizar de manera estadística, la acción se denomina acción dinámica aleatoria. En este caso, el análisis de la respuesta de un sistema estructural a una acción dinámica aleatoria se define como análisis no-determinista.
Generalmente, la respuesta estructural a cualquier acción dinámica se expresa
básicamente en términos de desplazamientos en la estructura. Un análisis determinista conduce directamente a la historia en el tiempo de los desplazamientos correspondientes a la historia de la acción dinámica prescrita. En cambio, un análisis no-determinista nos lleva exclusivamente a la obtención de información estadística de los desplazamientos como resultado de la definición estadística de la acción variable.
Prácticamente todos los tipos de sistemas estructurales están sujetas a algún tipo
de acción dinámica al largo de su vida útil. Como base de partida para el análisis, es conveniente dividir las acciones dinámicas prescritas y aleatorias, en dos categorías básicas: acciones dinámicas periódicas y no-periódicas.
Las cargas o acciones periódicas muestran las mismas variaciones sucesivamente
para un número elevado de ciclos. La más simple de las acciones periódicas tiene una variación sinusoidal y es conocida como armónica simple. Estas acciones son características del balanceo de masas producido habitualmente por maquinaria de rotación. Otro ejemplo habitual de acción dinámica periódica es la producida por la presión hidrodinámica generada por la hélice de un barco sobre el casco de éste. En cualquier caso, como resultado de un análisis de Fourier, cualquier acción dinámica periódica se puede expresar como la suma de distintas series de armónicos simples por

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
8
lo que para el análisis de la respuesta estructural para cualquier acción dinámica periódica, se seguirá siempre el mismo procedimiento.
Las acciones no-periódicas pueden ser acciones impulsivas de muy corta duración
o formas generales de acciones de larga duración. La onda expansiva de una bomba es un caso típico de carga dinámica impulsiva. Para este tipo de acciones se utilizan métodos simplificados especiales de análisis. En cambio, la respuesta de las estructuras a acciones dinámicas no-periódicas de larga duración, como por ejemplo un terremoto, sólo se pueden tratar mediante procedimientos completamente generales de análisis dinámico. 2.1 EL PROBLEMA DINÁMICO El planteamiento y posterior resolución de un problema estructural dinámico difiere en dos aspectos principales respecto al problema estático estructural clásico. Por definición, la primera diferencia a remarcar es la naturaleza variable en el tiempo del problema dinámico. Dado que las acciones actuantes son variables en el tiempo y consecuentemente la respuesta de la estructura también, es evidente que el problema dinámico no presenta una única solución como se da en el caso del problema estático. Por esta razón, el analista deberá establecer una sucesión de soluciones correspondientes a las distintas etapas temporales sobre las que nos pueda interesar la respuesta estructural. Resulta evidente que el análisis dinámico requiere mayor tiempo y complejidad que el análisis estático. La segunda y principal diferencia entre los problemas de análisis estructural dinámico y estático se basa en la aparición de nuevas fuerzas para el equilibrio dinámico. Si una barra simplemente apoyada está sometida a la acción de una carga estática aplicada P, los momentos y cortantes internos, así como su deformada dependen exclusivamente de la carga P y se pueden obtener aplicando principios de equilibrio de fuerzas. En cambio, si la carga aplicada es de carácter dinámico P(t), los desplazamientos de la barra que resultan no dependen exclusivamente del valor de la carga P (t) sino también de las fuerzas inerciales que se oponen a las aceleraciones producidas por estos desplazamientos. Así pues, los momentos y cortantes internos de la barra no sólo deben estar en equilibrio con la fuerza externa aplicada si no también con las fuerzas inerciales que resultan de la aceleración de la barra. Las fuerzas inerciales que se oponen a las aceleraciones de la estructura, tal como se ha descrito en el párrafo anterior, son la diferencia principal del problema dinámico respecto al estático. Generalmente, Si las fuerzas inerciales representan una parte importante del equilibrio total de cargas con las fuerzas internas elásticas de la estructura, entonces el carácter dinámico del problema debe ser considerado en la resolución del mismo. Por otro lado, si los movimientos son suficientemente lentos como para que las fuerzas inerciales sean prácticamente nulas o despreciables, el análisis de la respuesta estructural puede realizarse en el instante de tiempo deseado

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
9
mediante procedimientos de análisis estático a pesar de que las cargas y la respuesta tengan naturaleza variable en el tiempo. 2.2 FORMULACIÓN DE LAS ECUACIONES DEL MOVIMIENTO El objetivo primero de un análisis estructural dinámico determinista es la evaluación de la historia en el tiempo de los desplazamientos para una estructura dada sometida a una acción variable en el tiempo. En la mayoría de los casos, un análisis aproximado en el que se incluyan solamente un número determinado de grados de libertad proporcionará un resultado suficientemente preciso, de manera que el problema se reduce a la determinación de las historias en el tiempo de las componentes de los desplazamientos seleccionados. Las expresiones matemáticas que definen los desplazamientos dinámicos se conocen como las ecuaciones del movimiento de una estructura y su resolución proporciona las ecuaciones en el tiempo de los desplazamientos. La formulación de las ecuaciones del movimiento para un sistema dinámico es posiblemente la fase más importante, y a menudo la más complicada, del procedimiento completo de análisis. A continuación se detallan los aspectos más importantes de tres posibles métodos que conducen a la formulación de las ecuaciones del movimiento: Ecuaciones de Equilibrio usando el Principio de d’Alembert, Principio de los Desplazamientos Virtuales y Principio de Hamilton. 2.2.1 Equilibrio directo. Principio de d’Alembert Las ecuaciones del movimiento de cualquier sistema dinámico representan expresiones de la segunda ley de Newton según la cual la velocidad de cambio del momento de una partícula m es igual a la fuerza actuando sobre ella. Esta relación se puede expresar matemáticamente mediante la ecuación diferencial,
=
dtdvm
dtdtp )( (2.1)
donde p(t) es el vector de la fuerza aplicada y v(t) es el vector posición de la partícula de masa m. Para la mayoría de problemas de análisis estructural dinámico se puede asumir que la masa no varía con el tiempo con lo que la ecuación se puede rescribir,
)()( 2
2
tvmdt
vdmtp &&≡= (2.2)
donde los puntos representan derivación respecto del tiempo. La ecuación (2.2), indicando que la fuerza es igual a la masa por la aceleración, se puede rescribir nuevamente de la forma,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
10
0)()( =− tvmtp && (2.3) en cuyo caso, el segundo término )(tvm && se conoce como fuerza inercial resistente a la aceleración de la masa m. El concepto de que una masa desarrolla una fuerza inercial proporcional pero opuesta a su aceleración es conocido como Principio de d’Alembert. Es un recurso muy conveniente en problemas de dinámica estructural porque permite expresar las ecuaciones del movimiento como ecuaciones de equilibrio dinámico. La fuerza dinámica p(t) puede representar muchos tipos de fuerzas actuando sobre la masa: apoyos elásticos que se oponen a los desplazamientos, fuerzas viscosas que resisten velocidades y fuerzas externas definidas independientemente. Así, si se introduce una fuerza interna que resiste aceleraciones, la ecuación del movimiento es meramente una expresión de equilibrio de todas las fuerzas que actúan sobre la masa. En muchos problemas simples la vía más directa y adecuada para formular las ecuaciones del movimiento es mediante dichas ecuaciones de equilibrio directas. 2.2.2. Principio de los Desplazamientos Virtuales Si el sistema estructural que deseamos analizar es relativamente complejo involucrando un número importante de puntos de masa o cuerpos de dimensión finita interconectados, las ecuaciones de equilibrio directas de todas las fuerzas que actúan en el sistema puede resultar dificultoso. Con frecuencia, las distintas fuerzas que intervienen pueden ser expresadas en términos de los desplazamientos (grados de libertad) pero sus relaciones de equilibrio pueden no ser evidentes. En estos casos, el principio de los desplazamientos virtuales permite la formulación de las ecuaciones del movimiento en sustitución de las relaciones de equilibrio directo. El principio de los desplazamientos virtuales puede expresarse de la siguiente manera: si un sistema que se encuentra en equilibrio bajo la acción de un grupo de fuerzas o cargas determinadas, se somete a un desplazamiento virtual compatible con las condiciones de contorno del sistema, el trabajo total realizado por la totalidad de las fuerzas es nulo. Con este principio, anular el trabajo total de las fuerzas durante el desplazamiento virtual es equivalente a un estado de equilibrio. Así pues, las ecuaciones de respuesta de un sistema dinámico pueden establecerse identificando en primer lugar, todas las fuerzas que actúan en las masas que forman el sistema incluyendo las fuerzas inerciales de acuerdo con el Principio de d’Alembert. Entonces, las ecuaciones del movimiento se obtienen separadamente introduciendo un desplazamiento virtual tipo correspondiente a cada uno de los distintos grados de libertad e igualando el trabajo realizado a cero. La mayor ventaja de este método de aproximación es que los trabajos virtuales son valores escalares y pueden ser sumados algebraicamente, mientras que las fuerzas actuantes en la estructura son vectoriales y sólo pueden superponerse vectorialmente.

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
11
2.2.3. Principio de Hamilton Otra forma de abordar los problemas para establecer las ecuaciones vectoriales de equilibrio es hacer uso de la forma diferencial de las cantidades de energía escalares. El concepto diferencial más aplicado generalmente es el principio de Hamilton que se expresa como,
∫∫ =+−2
1
2
1
0)(t
tnc
t
t
dtWdtVT δδ (2.4)
donde T= Energía cinética total del sistema
V= Energía potencial del sistema, incluyendo energías de deformación o potencial de cualquier fuerza conservativa externa. Wnc= Trabajo realizado por las fuerzas no conservativas que actúan en el sistema incluyendo el amortiguamiento y cualquier fuerza exterior arbitraria. δ= Variación tomada durante el intervalo de tiempo.
El principio de Hamilton postula que la variación de la energía cinética y potencial más la variación del trabajo realizado por las fuerzas no conservativas consideradas durante un intervalo (t1,t2) debe ser nulo. La aplicación de este principio conduce directamente a las ecuaciones del movimiento para un sistema estructural dado. Este proceso difiere del método de los desplazamientos virtuales en que la inercia y las fuerzas elásticas no están involucradas explícitamente; en cambio aparecen las variaciones de las energías cinética y potencial. Así pues, esta formulación presenta la ventaja de tratar exclusivamente cantidades puramente escalares de energía, mientras que las fuerzas y desplazamientos que aparecen para representar los efectos correspondientes en el análisis mediante el trabajo virtual son todas de carácter vectorial aunque sus términos del trabajo son escalares. Cabe destacar que al Principio de Hamilton puede aplicarse a problemas estáticos. En este caso, el término de la energía cinética T se anula, y los términos restantes de la integral no varían con el tiempo de modo que la ecuación (4) se reduce a, 0)( =− ncWVδ (2.5) que es una expresión conocida como la mínima energía potencial usada en los análisis estáticos.

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
12
2.3 SISTEMAS DE UN GRADO DE LIBERTAD En este apartado se deduce la ecuación diferencial del movimiento y sus soluciones en ausencia y presencia de excitación para oscilaciones en estructuras modelizadas mediante sistemas espacialmente discretos de un solo grado de libertad y con comportamiento elástico y lineal. 2.3.1 Modelización En el croquis de la izquierda de la figura 2.1 se representa un sistema mecánico constituido por una masa m que puede desplazarse longitudinalmente (aunque en la figura el movimiento sea horizontal, este modelo puede describir también oscilaciones verticales) y se encuentra unida a un sistema inercial mediante un muelle de constante k y un amortiguador viscoso de constante c conectados en paralelo. En el amortiguador la fuerza es proporcional a la velocidad: xcf &= , el superíndice · indica derivación respecto del tiempo. El movimiento puede estar producido por la acción de una fuerza dinámica de excitación f(t) (en la dirección de x) o por un movimiento xg(t) del soporte en que descansa la estructura (también en dirección de x). Ambas situaciones se describen en el centro y derecha de la figura 3 respectivamente.
Figura 2.1: Sistema de un grado de libertad [1]. Planteando el equilibrio de las fuerzas que actúan sobre la masa m en un instante arbitrario incluyendo las fuerzas de inercia se obtiene la siguiente ecuación que rige el movimiento, )(tfkxxcxm =++ &&& (2.6) Cabe destacar que en oscilaciones verticales el valor de x responde al desplazamiento respecto de la posición de equilibrio dada por xe=(m·g)/k. En el esquema derecho de la figura 1 se muestra una masa unida a unos soportes que no constituyen un sistema inercial sino que experimentan un movimiento; este tipo de situaciones se dan en movimientos sísmicos o en oscilaciones transmitidas por el terreno. Si xg e y son, respectivamente, los desplazamientos absolutos de los soportes y de la masa el desplazamiento relativo de la masa respecto del terreno es x=y-xg y la ecuación diferencial del movimiento es, 0)( =+++=++ kxxcxxmkxxcym g &&&&&&&& (2.7) )(txmkxxcxm g&&&&& −=++ (2.8)

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
13
La relación (2.8) presenta la ventaja respecto de (2.7) de depender de una única incógnita (x). Esta expresión muestra que el comportamiento dinámico de la masa m es el que resulta al aplicarle una fuerza igual y de signo contrario a la fuerza de inercia, proporcional a la masa, transmitida por el movimiento de los soportes. Las ecuaciones (2.6) y (2.8) corresponden a movimientos de traslación; en oscilaciones angulares es necesario sustituir la masa m por el momento de inercia I respecto del centro de giro resultando relaciones del tipo, )(tMCcI =++ θθθ &&& ; )(tI gθ&&− (2.9) donde θ es la coordenada angular, C es la rigidez a giro, M(t) es un momento de excitación y θg es el movimiento rotativo de los soportes. En general, aquellas estructuras que tienen la mayor parte de la masa concentrada en un punto y que las fuerzas de excitación actúan en dicho punto, puede decirse que son las únicas estructuras que pueden representarse razonablemente por sistemas discretos de un grado de libertad. No obstante, si se postula que la deformación de la estructura sigue una determinada configuración, es posible describir el comportamiento dinámico de estructuras con fuerzas, rigideces y masa distribuidas o concentradas en varios puntos mediante modelos de un grado de libertad. En la figura 2.2 se esquematizan tres estructuras que responden a esta situación.
Figura 2.2: Estructuras con propiedades distribuidas o concentradas en varios puntos [1].
En los tres casos los parámetros de la estructura (masa, cargas...) no se encuentran concentrados en un punto. El croquis de la izquierda corresponde a una barra de sección constante que soporta tres masas concentradas, el del centro es un voladizo y el de la derecha representa un aplaca sustentada en su contorno. En los tres casos, las líneas discontinuas describen la configuración que se supone que siguen las distintas estructuras durante las oscilaciones. Considerando oscilaciones verticales, planteando la ecuación del movimiento (2.6) e imponiendo las ecuaciones constitutivas de la flexión en la barra, la coordenada x, la rigidez k y la excitación f(t) vienen dadas por,
)(),()(
1
1
xtxvtx
ψ= (2.10)
∑ ∫=
+=3
1 01
201 )()(
i
L
iii dxxmxMm ψψ (2.11)

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
14
∫ ′′=L
dxxEIk0
112 )(ψ (2.12)
∫=L
dxxtxftf0
1110 )(),()( ψ (2.13)
donde x1 es la coordenada que describe las distintas secciones de la barra, ψ(x1) es la configuración (flecha) supuesta, v(x1,t) es la flecha en la sección x1 en el instante t, M1, M2, y M3 son las masas concentradas (situadas en tres secciones definidas por x1, x2 y x3), m0 es la masa de la barra por unidad de longitud, EI es la rigidez a flexión de la barra y f0(x1,t) es la fuerza distribuida aplicada en la sección x1 en el instante t. Siguiendo el mismo procedimiento se solucionarían las otras dos estructuras de la figura 2.2 2.3.2. Oscilaciones Libres Es aquel caso en que no existe excitación en el sistema estructural, 0)( =tf ó 0)( =− txm g&& En estas condiciones las ecuaciones (2.7) y (2.8) se transforman en, 0=++ kxxcmx & (2.14) Ya que no existe excitación, el movimiento tiene que estar generado por condiciones iniciales que se refieren ordinariamente al desplazamiento y a la velocidad en un instante t0:
00
00
)()(
xtxxtx&& =
= (2.15)
La relación (2.14) es una ecuación diferencial lineal de coeficientes constantes y homogénea que admite soluciones de la forma Ceλt, siendo C una constante y λ una raíz de la ecuación característica mλ2 + cλ + k = 0 cuyas soluciones son,
mk
mc
mc
−
±−=
2
22λ (2.16)
El valor del coeficiente c que anula el discriminante se denomina amortiguamiento crítico cc, siendo su valor, kmcc 2= (2.17)

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
15
Los valores del cociente c/cc permiten distinguir 4 casos distintos en la resolución de la ecuación del movimiento:
1. c=0 Sistema no amortiguado. 2. 0<c<cc Amortiguamiento infracrítico. 3. c=cc Amortiguamiento crítico. 4. c>cc Amortiguamiento supracrítico.
El caso primero supone una idealización que no se corresponde con situaciones reales; la inmensa mayoría de las estructuras de arquitectura e ingeniería civil poseen un amortiguamiento muy inferior al crítico y pueden ser catalogadas en el conjunto de situaciones representadas en el punto segundo de los cuatro anteriores. Los casos de amortiguamiento crítico y supracrítico corresponden, generalmente, a elementos propios de ingeniería mecánica tales como aparatos amortiguadores o elementos de absorción dinámica. (1) Cuando c=0, amortiguamiento nulo, las soluciones de la ecuación del movimiento son armónicas, tBtAtx 00 sincos)( ωω += (2.18) en donde A y B son constantes que dependen de las condiciones iniciales y ω0 es la frecuencia natural o propia del sistema no amortiguado,
mk
=0ω (2.19)
De la expresión (2.19) se desprende que un sistema estructural rígido (↑k) y de poca masa (↓m) tiende a vibrar con gran frecuencia o rápidamente, mientras que un sistema flexible y de poca masa tiende a oscilar con una frecuencia baja (lentamente). En la gráfica de la figura 2.3 se muestra la respuesta libre de un sistema no amortiguado en la que se observa que la respuesta no se atenúa nunca, cosa no aplicable en la realidad y que responde exclusivamente a modelos teóricos.
Figura 2.3: Respuesta libre de un sistema no amortiguado [2].

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
16
(2) Cuando 0<c<cc, amortiguamiento inferior al crítico, la solución de la ecuación del movimiento es, )sincos()( 0 tBtAetx aa
t ωωζω += − (2.20) en donde ζ es la fracción del amortiguamiento crítico y ωa es la frecuencia natural del sistema amortiguado que vienen definidas por,
02 ω
ζmc
= (2.21)
2
0 1 ζωω −=a (2.22) Tal como se aprecia en la figura 2.4, el amortiguamiento ralentiza ligeramente el movimiento libre de un sistema amortiguado respondiendo este a una onda armónica de frecuencia ωa con amplitud decreciente exponencialmente.
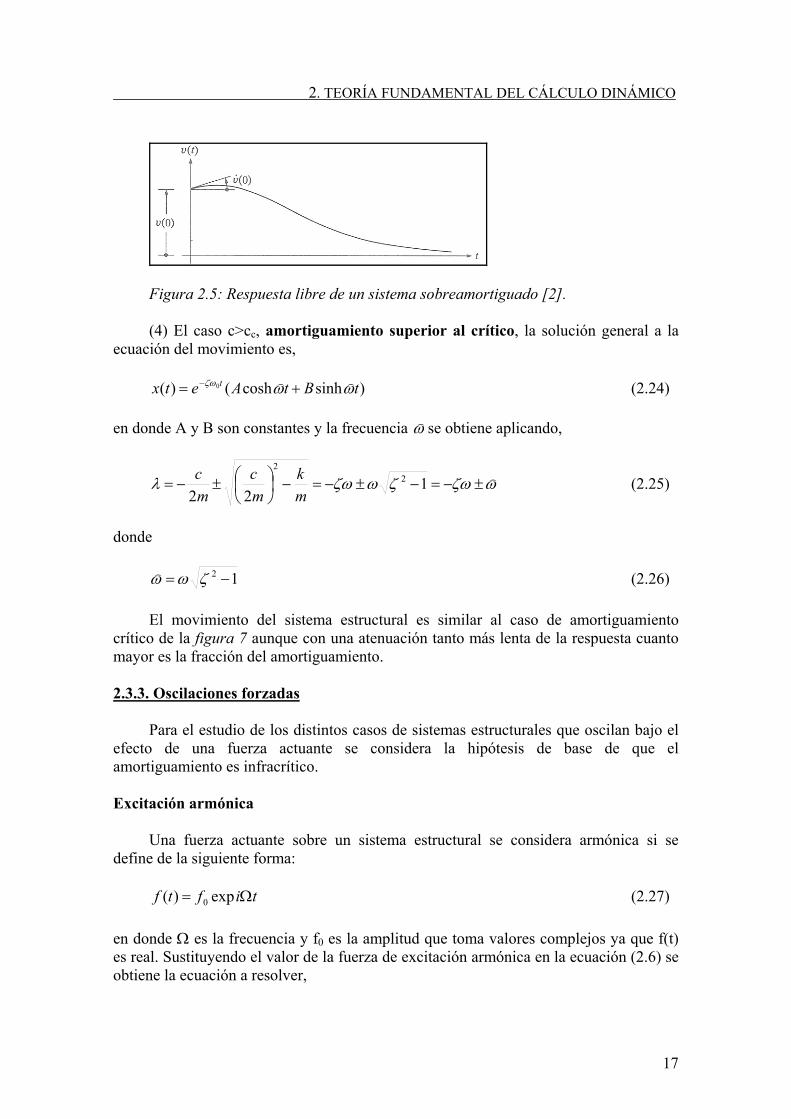
Figura 2.4: Respuesta libre de un sistema amortiguado [2]. (3) Cuando c=cc, amortiguamiento crítico, la solución general de la ecuación del movimiento es, )()( 0 BtAetx t += −ω (2.23) en donde A y B son constantes. En esta situación, el movimiento del sistema estructural carece de periodicidad y si el sistema es separado inicialmente de su posición de equilibrio tiende a volver a esta sin efectuar oscilación alguna tal como se muestra en la figura 2.5.
2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
17
Figura 2.5: Respuesta libre de un sistema sobreamortiguado [2]. (4) El caso c>cc, amortiguamiento superior al crítico, la solución general a la ecuación del movimiento es, )sinhcosh()( 0 tBtAetx t ωωζω )) += − (2.24) en donde A y B son constantes y la frecuencia ω) se obtiene aplicando,
ωζωζωζωλ )±−=−±−=−
±−= 1
222
2
mk
mc
mc (2.25)
donde 12 −= ζωω) (2.26) El movimiento del sistema estructural es similar al caso de amortiguamiento crítico de la figura 7 aunque con una atenuación tanto más lenta de la respuesta cuanto mayor es la fracción del amortiguamiento. 2.3.3. Oscilaciones forzadas Para el estudio de los distintos casos de sistemas estructurales que oscilan bajo el efecto de una fuerza actuante se considera la hipótesis de base de que el amortiguamiento es infracrítico. Excitación armónica Una fuerza actuante sobre un sistema estructural se considera armónica si se define de la siguiente forma: tiftf Ω= exp)( 0 (2.27) en donde Ω es la frecuencia y f0 es la amplitud que toma valores complejos ya que f(t) es real. Sustituyendo el valor de la fuerza de excitación armónica en la ecuación (2.6) se obtiene la ecuación a resolver,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
18
tifkxxcxm Ω=++ exp0&&& (2.28) La solución general de la ecuación (2.28) es suma de una particular y de la general de la ecuación homogénea obtenida previamente en el apartado de oscilaciones libres con amortiguamiento infracrítico. Esta última no se considera habitualmente debido q que tiende a atenuarse, se denomina respuesta transitoria, y a que depende de las condiciones iniciales y de la variación temporal de la excitación hasta alcanzar el régimen permanente. En consecuencia se considera solamente la solución particular. Ésta es de la forma,
tixtx Ω= exp)( 0 (2.29) debido a que (2.28) es lineal, es decir, que la respuesta permanente a una excitación armónica de amplitud f0 es otra onda armónica de la misma frecuencia pero de amplitud x0. Sustituyendo la ecuación (2.29) en (2.28) hallamos la relación existente antre ambas amplitudes,
kicm
fx+Ω+Ω−
= 20
0 (2.30)
Estas expresiones pueden rescribirse como,
)(
)()()(
00 Ω=Ω=
HfxHtftx
(2.31)
en donde H(Ω) se denomina función de transferencia del sistema y es igual a,
ζββωζω 21
112
111)( 2200
22 ikimkicmH
+−=
+Ω+Ω−=
+Ω+Ω−=Ω (2.32)
siendo β el cociente entre la frecuencia de la excitación y la natural del sistema β=Ω/ω0
El valor constante kf
xest0= es la respuesta real y estática de la ecuación (2.29)
para Ω=0,
kHxkHkf
x est )()(00 Ω=Ω= (2.33)
El módulo de H(Ω)·k se denomina factor de amplificación dinámica D y viene dado por,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
19
222
0
)2()1(1)(
ζββ +−=Ω== kH
xx
Dest
(2.34)
En la figura 2.6 se ha representado una familia de curvas o espectros de la amplificación dinámica (D) en función del cociente entre la frecuencia de la excitación y la natural del modelo estructural (β) para distintos valores del amortiguamiento (ζ).
Figura 2.6: Variación del factor de amplificación dinámica con la frecuencia y el amortiguamiento [2].
Los espectros de la amplificación dinámica (D) presentan un máximo o pico en las proximidades de β=1 más pronunciado cuanto menor es el amortiguamiento (ζ). Derivando respecto de β la expresión (2.34) se obtiene que D alcanza un máximo para
221 ζβ −= de valor )12/(1 2max ζζ −=D . Es decir, cuando las frecuencias de la
excitación (Ω) y de la estructura ω0 toman valores próximos, la amplitud de la respuesta crece extraordinariamente (ver expresiones (2.33) y (2.34)), especialmente si el factor de amortiguamiento es bajo. Para ζ=0, se obtiene Dmax=∞ y para ζ=0,01, se obtiene Dmax=50, es decir, que la amplitud de la respuesta dinámica es 50 veces superior a la estática. Este fenómeno es sumamente importante en dinámica de estructuras i se conoce con el nombre de resonancia. En la figura 2.6 se aprecia que los espectros de D toman valores parecidos excepto en las proximidades del pico de resonancia, cosa que demuestra que en la respuesta permanente del sistema estructural, el papel del amortiguamiento sólo es relevante en dicho caso, aunque ahí su influencia puede llegar a ser muy importante. Si la excitación es armónica, la respuesta permanente es armónica de la misma frecuencia pero entre ambas existe un desfase definido por un ángulo θ que viene dado por la expresión,
212tanβζβθ−
= (2.35)

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
20
En este apartado se ha considerado solamente la respuesta permanente del sistema estructural. Por lo que respeta a la respuesta transitoria de la estructura, conviene destacar que si la excitación armónica se inicia en un determinado instante, se precisan algunos ciclos de oscilación para que la respuesta alcance su amplitud máxima, es decir, para que la resonancia se manifieste en toda su magnitud debe existir una excitación de cierta duración. En la figura 2.7 se muestra la historia temporal del cociente xest(t)/x(t).
Figura 2.7: Respuesta en resonancia de un sistema amortiguado [2]. Excitación arbitraria Cuando la fuerza de excitación que actúa en el sistema no responde a una expresión matemática conocida no es posible resolver analíticamente las ecuaciones (2.6) y (2.8) y se necesita recurrir a métodos numéricos de resolución. En estos casos, la respuesta dinámica del sistema puede obtenerse mediante dos procedimientos: resolución numérica en el dominio del tiempo mediante las integrales de Duhamel y resolución en el dominio de la frecuencia mediante una doble transformación de Fourier. Análisis en el dominio del tiempo. Integral de Duhamel. En un sistema elástico y lineal, la respuesta x(t) en cada instante t puede ser obtenida como suma de las respuestas en dicho instante a los impulsos elementales f(τ)dτ correspondientes a los instantes anteriores a t (t0 ≤ τ ≤ t). Aplicando la relación entre el impulso y la cantidad de movimiento se obtiene que la velocidad instantánea
)(τxd& al cabo de τd tiene por valor mdf /))(( ττ mientras que el desplazamiento puede considerarse prácticamente nulo. Sustituyendo las condiciones iniciales para el instante τ en la expresión (2.6) se obtiene el valor del desplazamiento en el instante t (dx(t)) causado por el impulso elemental f(τ)dτ en el instante τ,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
21
τ
τωω
ττ
τωττωω
ζωττ
τζω
τζω
<
−=
=
−+−
+=
−−
−−
t
tm
dfe
tdxtdxxdetdx
aa
t
aaa
t
)(sin)(
)(cos)()(sin)()()(
)(
0)(
0
0&
(2.36)
Integrando entre t0 y t se obtiene el desplazamiento x(t),
∫∫ −== −−t
ta
t
a
t
t
dtefm
tdxtx0
0
0
)(sin)(1)()( )( ττωτω
τζω (2.37)
La expresión (2.37) es conocida como la Integral de Duhamel. El integrando
)(sin)( )(0 τωτζω −= −− teth at es la respuesta en el instante t a un impulso unidad (delta de
Dirac) en el instante τ. Analizando la expresión (2.37) se observa que el amortiguamiento indica la “memoria” del sistema; en excitaciones de tipo impulsivo, la repercusión del amortiguamiento en la respuesta máxima de la estructura es bastante baja mientras que en acciones continuadas su influencia puede llegar a ser determinante. La expresión (2.37) es únicamente válida en presencia de una excitación continuada sobre el sistema; si además se parte de unas condiciones iniciales no nulas
))(),(( 00 txtx & la expresión se convierte en,
[ ]
∫ −+
+++=
−−
−
t
at
a
aaaaa
t
dtefm
ttxttwtxmetx
0
)(
000
)(sin)(1
sin)()sincos)(()(
0
0
ττωτω
ωωζωωω
τζω
ζω
&
(2.38)
La Integral de Duhamel se puede resolver numéricamente discretizando el intervalo de integración y considerando un criterio de interpolación de la excitación f(t). La velocidad x& y la aceleración x&& pueden obtenerse derivando bajo el signo integral en la expresión (2.37) o derivando numéricamente a partir de la solución discreta de la Integral de Duhamel. Análisis en el dominio de la frecuencia. Transformada de Fourier. Si f(t) tiene un periodo T con lo que f(t + T) = f(t), la función puede descomponerse en una serie de Fourier:
∑+∞=
−∞=
Ω=n
nn tinftf exp)( (2.39)

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
22
en donde Ω=2π/T y los coeficientes complejos fn representan la intensidad con la que la frecuencia nΩ está contenida en f(t) y vienen dados por,
∫ Ω−=T
n dttintfT
f0
)exp()(1 (2.40)
Los coeficientes fn y f-n son conjugados. Si se sustituye la expresión (2.39) en las relaciones definidas en (2.31), la respuesta de un sistema estructural a una fuerza f(t) puede expresarse como,
∑+∞=
−∞=
ΩΩ=n
nn tinfnHtx exp)()( (2.41)
Esta expresión que resulta es aplicable exclusivamente a excitaciones periódicas. Si f(t) no cumple esta condición, puede hacerse tender T a infinito con lo que Ω tiende a un valor infinitesimal dω y la serie de valores discretos nΩ se convierten en una función continua ω. Las relaciones (2.39), (2.40) y (2.41) se transforman entonces respectivamente en,
∫+∞
∞−
= ωωωπ
tdiftf exp)(21)( (2.42)
∫+∞
∞−
−= ωωω dtitff )exp()()( (2.43)
∫+∞
∞−
= ωωωωπ
tdifHtx exp)()(21)( (2.44)
Las igualdades (2.42) y (2.43) muestran que f(ω) es la transformada de Fourier de f(t) y que ésta es la transformada inversa de la primera. Dado que la transformada de Fourier es una operación biunívoca, f(ω) contiene la misma información que f(t) y pueden realizarse análisis en el dominio del tiempo o de la frecuencia. La obtención de la respuesta x(t) a partir de la excitación f(t) según la expresión (2.44), puede interpretarse que se efectúa en tres etapas: en primer lugar se realiza una transformada directa de Fourier (2.43) para halar f(ω), a continuación se determina la respuesta en el dominio de la frecuencia multiplicando por la función de transferencia ( x(t)=H(ω)f(ω) ) y finalmente se obtiene la rspuesta en el dominio del tiempo x(t) mediante una transformación inversa de Fourier (2.44). Derivando la expresión (2.44) dos veces respecto del tiempo se observa que la repercusión de las frecuencias altas en la aceleración es mayor que en el desplazamiento,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
23
∫+∞
∞−
−= ωωωωω
πtdifHtx exp)()(
21)( 2&& (2.45)
La comparación de este resultado con la transformación de Fourier indicada en (44) muestra que la aceleración de la respuesta en el dominio de la frecuencia viene dada por, )()()( 2 ωωωω fHx =&& (2.46) 2.4 SISTEMAS DE VARIOS GRADOS DE LIBERTAD En este apartado se deduce la ecuación diferencial del movimiento y sus soluciones en ausencia y presencia de excitación para oscilaciones en estructuras modelizadas mediante sistemas espacialmente discretos de varios grados de libertad y con relaciones constitutivas elásticas y lineales. 2.4.1. Modelos de Masas Concentradas El análisis del sistema dinámico de la figura 2.8 se complica por el hecho de que las fuerzas inerciales resultan de los desplazamientos de la estructura variables en el tiempo que están a su vez influenciados por las magnitudes de las fuerzas inerciales. Lógicamente este círculo cerrado entre causa y efecto sólo puede ser atacado directamente mediante la formulación del problema en términos de ecuaciones diferenciales. Además, dado que la masa de la barra se encuentra distribuida continuamente a lo largo de su longitud, los desplazamientos y aceleraciones deben estar definidos para cada punto a lo largo del eje principal de la barra si las fuerzas inerciales se definen completamente. En este caso, el análisis debe formularse en términos de ecuaciones diferenciales parciales porque la posición a lo largo del vano, al igual que el tiempo t, debe considerarse como una variable independiente.
Figura 2.8: (a) Estado de cargas estático (b) Estado de cargas dinámico [2]. Si se asume que la masa de la barra se encuentra concentrada en un número discreto de puntos tal como se muestra en la figura 2.9, el problema analítico se simplifica enormemente porque las fuerzas inerciales actúan exclusivamente en estos puntos de concentración de masa. En este caso, sólo es necesario definir los desplazamientos y aceleraciones en estos determinados puntos.

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
24
Figura 2.9: Idealización de una viga simple en un sistema de masas concentradas [2].
El número de componentes del desplazamiento que deben ser considerados para representar los efectos de todas las fuerzas inerciales significativas de la estructura se definen como el número de grados de libertad dinámicos de la estructura. Por ejemplo, si las tres masas del sistema de la figura 2.9 están totalmente concentradas y están impedidos o restringidos de manera que los puntos de concentración de masa sólo se desplazan verticalmente, hablaríamos de un sistema de 3 grados de libertad. Si consideramos que las masas no están completamente concentradas en los puntos indicados y que poseen una inercia al giro finita, los giros de estos tres puntos también deben ser considerados en cuyo caso hablaríamos de un sistema o estructura con 6 grados de libertad. De modo general, si la estructura se puede deformar en un espacio tridimensional, cada punto de concentración de masa tendría 6 grados de libertad con lo que el sistema de la figura tendría 18 grados de libertad. Basándonos en estas consideraciones básicas, está claro un sistema de masa distribuida uniformemente, como la estructura de la figura 2.8, posee infinitos grados de libertad. Las oscilaciones verticales no suelen representarse adecuadamente por modelos de masas concentradas puesto que no es correcto suponer que las masas (forjados de cda una de las plantas) oscilan en bloque debido a que la masa de cada piso se encuentra distribuida de manera más o menos uniforme sobre su superficie, por lo que en estos casos, resulta más acertado discretizar el sistema estructural mediante modelos de elementos finitos. El modelo de masas concentradas es apropiado para pórticos de edificación sometidos a fuerzas horizontales del tipo que se muestra en la figura 4.10.
Figura 2.10: Edificio de cortante de N plantas [1]. Se muestra un edificio de N plantas cuyo comportamiento dinámico se supone plano (2D), lo que implica simetría de masa y de rigidez en cada planta. Se supone que la rigidez a flexión de los forjados es infinitamente superior a la de los pilares; esta hipótesis es razonable para edificios de altura baja y media y las construcciones que

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
25
cumplen esta condición se suelen denominar edificios de cortante (“shear buildings”). Concentrando las masas a la altura de cada piso, el comportamiento dinámico horizontal puede describirse por el modelo mecánico discreto de masas concentradas representado a la derecha. 2.4.2. Modelos de Elementos Finitos Un tercer método para expresar los desplazamientos de una estructura en términos de un número finito de coordenadas discretas de desplazamientos, que combina aspectos de las dos aproximaciones descritas en los apartados anteriores (masas concentradas y desplazamientos generalizados) es la idealización de la estructura mediante elementos finitos. Básicamente consiste en representar el comportamiento estructural de un medio continuo por el de unos recintos en los que se descompone su dominio. Ya que su tamaño es finito (en contraposición al infinitesimal) estos subdominios se denominan elementos finitos. Los elementos finitos continúan siendo medios continuos pero su comportamiento se representa por el de un conjunto discreto de puntos denominados nodos. Los desplazamientos en el resto de puntos se interpolan según unas funciones que se conocen como funciones de forma. Los elementos finitos adyacentes se conectan a través de los nodos situados en su perímetro lo que implica que en los nodos compartidos por varios elementos los desplazamientos son iguales para todos éstos. La idealización de la estructura en elementos finitos es aplicable a cualquier tipo de estructura independientemente de su geometría. En función del comportamiento estructural a analizar, los elementos existentes pueden ser agrupados en tres categorías: unidimensionales (elementos de barras), bidimensionales (de elasticidad bidimensional, de placa de lámina, de membrana...) y tridimensionales (sólidos). En cualquier caso, los elementos suelen tener configuraciones geométricas sencillas; en dos dimensiones son triángulos o rectángulos y en tres dimensiones son tetraedros o paralelepípedos. Para el caso estático, en ausencia de tensiones y deformaciones iniciales, el comportamiento estructural de cada elemento se describe mediante la siguiente ecuación de equilibrio, eeee qfaK =− (2.47) en donde Ke es la matriz de rigidez del elemento, ae es el vector de desplazamientos nodales (sus componentes son los desplazamientos de los nodos), fe es el vector de fuerzas nodales equivalentes y qe es el vector de fuerzas nodales de equilibrio (fuerzas ficticias que hay que añadir en los nodos para garantizar el equilibrio de cada elemento): ∫= eV
TTe DLNdVLNK (2.48)
eNau = (2.49)
2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
26
∑∫∫=
++=n
ii
S
T
V
Te ptdSNbdVNfee 1
(2.50)
En estas expresiones N es la matriz de funciones de forma, L es el operador diferencial que relaciona en cada punto las deformaciones ε con los movimientos u (ε=L·u), D es la matriz de constantes elásticas del material y b, t y pi son las fuerzas que actúan, respectivamente, en el interior Ve , en el contorno Se y en puntos aislados del elemento. Las relaciones constitutivas entre las tensiones σ y las deformaciones ε vienen dadas por σ= D·ε. Las ecuaciones (2.47) pueden ser ensambladas imponiendo las condiciones de equilibrio de cada nodo (la suma de las fuerzas nodales de equilibrio correspondientes a todos los elementos adyacentes es igual a cero). Después de eliminar los grados de libertad restringidos (suprimiendo las correspondientes filas -ecuaciones- y columnas -incógnitas-) se obtiene la ecuación de equilibrio de la estructura: fKx = (2.51) K es la matriz de rigidez de la estructura, x es el vector que contiene los desplazamientos de los grados de libertad y f es el vector de las fuerzas exteriores expresadas por sus componentes equivalentes sobre los nodos (resulta de ensamblar los vectores fe). Si la sustentación es suficiente para garantizar el equilibrio de la estructura (es decir esta es isostática o hiperestática) la matriz de rigidez es inversible y la ecuación anterior puede ser resuelta para obtener x a partir de f: x=K-1·f. En el caso dinámico las ecuaciones de equilibrio deben ser reemplazadas por las del movimiento, en que se incluyen las fuerzas de inercia y amortiguamiento. El vector de fuerzas nodales equivalentes viene ahora dado por
∫∫∑∫∫ −−++== eeee S
T
V
Tn
ii
S
T
V
Te dVtuNdVtuNtpdSttNdvtbNtf )()()()()()(1
&&& µρ (2.52)
donde ρ y µ representan la densidad y la viscosidad del material, respectivamente. La ecuación del movimiento del elemento es eeeeeeee qfaKaCaM =−++ &&& (2.53) donde Me y Ce son, respectivamente, las matrices de masa y amortiguamiento del elemento y vienen dadas por
2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
27
∫=eV
Te NdVNM ρ ∫=eV
Te NdVNC µ (2.54)
En la práctica µ es desconocida y la matriz de viscosidad suele obtenerse mediante procedimientos utilizados para el análisis modal. Como regla general, los elementos finitos proporcionan la aproximación más eficiente para expresar los desplazamientos de cualquier configuración estructural que suponga un conjunto de coordenadas discretas. 2.5 SISTEMAS DE PARÁMETROS DISTRIBUIDOS En este apartado se analiza el comportamiento dinámico de sistemas estructurales cuyas propiedades (en especial, la masa) no se encuentran concentradas en torno a ciertos puntos sino que están distribuidas a lo largo de toda su extensión. Debido a la dispersión de la masa, no resulta fácil describir el comportamiento dinámico de este tipo de estructuras mediante modelos discretos y pude resultar más sencillo (especialmente en estructuras de geometría simple como barras rectas de sección constante, placas rectangulares o circulares de espesor constante…) formular directamente las ecuaciones del movimiento de la estructura sin discretizar. En estos casos se tienen sistemas continuos, con infinitos grados de libertad, y el movimiento se rige por ecuaciones diferenciales en derivadas parciales. Al igual que en los anteriores apartados se considera comportamiento elástico y lineal del material. El notable desarrollo experimentado últimamente por los métodos numéricos de análisis ha generado cierta tendencia a estudiar las oscilaciones de sistemas de parámetros distribuidos mediante modelos discretos en detrimento de los modelos continuos. El interés de los modelos continuos radica en la posibilidad de obtener soluciones analíticas simples (en casos de geometría sencilla) que proporcionan estimaciones suficientemente precisas de frecuencias naturales y otros parámetros dinámicos de estructuras reales con configuraciones asimilables a modelos geométricos de baja complejidad. La principal ventaja de as expresiones analíticas es que permiten valorar fácilmente la influencia de los distintos parámetros que intervienen en la respuesta del sistema estructural. A continuación se presenta el método de planteamiento del problema y su resolución para el caso de sistemas continuos unidimensionales (barras rectas) sin ampliar la resolución a elementos bidimensionales (placas) puesto que el planteamiento se realiza de manera paralela con influencia de las dos dimensiones. 2.5.1. Ecuación del movimiento transversal de barras rectas. Se formula la ecuación diferencial que rige el comportamiento dinámico transversal de una pieza lineal de directriz recta sometida a la acción de una carga dinámica perpendicular a su directriz. Se considera que el material se comporta de manera lineal y elástica y se supone que las deformaciones transversales de flexión

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
28
están producidas únicamente por el momento flector, despreciando las deformaciones producidas por el cortante, y están contenidas en el plano en el que actúan las cargas exteriores de excitación (análisis en 2D). En la figura 2.11 se muestra un tramo de barra rectilínea sometida a una carga dinámica exterior f(x,t) siendo x la coordenada que describe la directriz y t el tiempo. Las constantes elásticas de la pieza son el módulo de elasticidad longitudinal E y el momento de inercia I. Si la inercia de la barra no es constante, I es una función que depende de x. Un parámetro importante en el análisis dinámico es la masa por unidad de longitud m que también dependerá de x para barras de sección variable.
Figura 2.11: (a) coordenadas y propiedades de la barra (b)esfuerzos sobre una rebanada [2].
En el esquema inferior de la figura 2.11, se muestran los esfuerzos a que se encuentra sometida una rebanada de longitud infinitesimal dx. Aplicando el Principio de d’Alembert a las componentes verticales y de rotación (despreciando la inercia a rotación de la rebanada) se obtiene,
Q
xM
ymtxfxQ
=∂∂
−=∂∂
− &&),( (2.55)
Sustituyendo la segunda expresión en la primera y teniendo en cuenta la relación entre el momento flector y la curvatura se obtiene la ecuación diferencial que rige las oscilaciones de flexión de la pieza de la figura 2.11,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
29
),(2
2
2
2
txfymx
yEIx
=+
∂∂
∂∂
&& (2.56)
Si la pieza tiene sección constante, la expresión anterior se transforma en, ),( txfymEIy IV =+ && (2.57) La relación (2.57) es una ecuación diferencial en derivadas parciales, de cuarto orden, lineal y de coeficientes constantes. La solución y(x,t) debe satisfacer además las condiciones de contorno correspondientes a las vinculaciones en los apoyos (articulaciones, empotramientos, extremos libres…). En la ecuación del movimiento anterior no se ha incluido ningún tipo de amortiguamiento. Considerando amortiguamiento viscoso (es decir, fuerza proporcional a la velocidad), este efecto puede ser tenido en cuenta de dos maneras: a través de los desplazamientos transversales y o a través de las deformaciones longitudinales ε en la dirección de la directriz de la pieza. Denominando c1 al coeficiente de amortiguamiento transversal, la fuerza de amortiguamiento fa perpendicular a la directriz se expresa mediante, ycfa &1= (2.58) Denominando c2 al coeficiente de amortiguamiento longitudinal, en cada punto de la sección se tiene una tensión normal de amortiguamiento σa dada por, εσ &2ca = (2.59) Integrando esta expresión a lo largo de la sección se obtiene el momento flector de amortiguamiento Ma a partir de la expresión, ∫= S aa zdAM σ (2.60)
en donde z es la ordenada transversal en el plano de la flexión medida desde la fibra neutra. Teniendo en cuenta que la distribución de tensiones normales a lo largo del canto de la sección es lineal, se obtiene la siguiente expresión para el momento flector de amortiguamiento,
tx
yIcM a ∂∂∂
= 2
3
2 (2.61)
Incluyendo los dos efectos de amortiguamiento anteriores en la ecuación diferencial del movimiento resulta,

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
30
),(12
3
22
2
2
2
txfymyctx
yIcx
yEIx
=++
∂∂
∂+
∂∂
∂∂
&&& (2.62)
que constituye la ecuación que rige las deformaciones dinámicas de flexión de una barra recta amortiguada y cagada transversalmente. En barras de sección constante, la expresión (62) se transforma en, ),(12 txfymycyIcEIy IVIV =+++ &&&& (2.63) 2.5.2. Análisis modal En este apartado se presenta un estudio de los modos propios de vibración de barras de directriz rectilínea sometidas a distintas condiciones de sustentación. Se considera en primer lugar una barra sin amortiguamiento ni fuerzas externas de excitación cuyo movimiento a partir de unas condiciones iniciales prescritas es regido por la expresión (2.56). Se trata de analizar la existencia de soluciones de esta ecuación en que todos los puntos de la barra oscilan armónicamente con la misma frecuencia. Esto equivale a la existencia de soluciones de la forma, )()(),( txyxy ηφ= (2.64) donde la pieza oscila de acuerdo con la función armónica µ(t) siguiendo una determinada configuración Φ(x). Cada expresión de esta forma constituye un modo propio de vibración de la barra. Desde el punto de vista matemático, la descomposición expresada en la relación anterior corresponde a separar las variables, x en Φ(x) y t en µ(t). Este es un procedimiento habitual de resolución de ecuaciones diferenciales en derivadas parciales. La sustitución de la solución )()(),( txyxy ηφ= en la ecuación del movimiento (56) proporciona el resultado, 0)( =+′′′′ ηφηφ &&mEI (2.65) Separando las variables x y t se obtiene,
2)( ωηη
φφ
=−=′′′′ &&
mEI (2.66)
en donde ω es un valor real constante ya que el primer miembro depende exclusivamente de x y el segundo de t. A partir de la igualdad anterior se obtienen las dos ecuaciones independientes siguientes correspondientes, respectivamente, a las variables x y t, 0)( 2 =−′′′′ φωφ mEI 02 =+ ηωη&& (2.67) La segunda relación muestra que ω es la frecuencia natural de vibración del modo

2. TEORÍA FUNDAMENTAL DEL CÁLCULO DINÁMICO
31
propio (expresada en radianes por segundo). En barras de sección constante la primera ecuación se convierte en 02 =− φωφ mEI IV y su solución general es, axAaxAaxAaxAx coshsinhcossin)( 4321 +++=φ (2.68) en donde ω2=a4EI/m y Ai (i=1,...,4) son constantes cuyos valores se obtienen a partir de las condiciones de contorno. Para barras de un tramo de longitud L con distintas condiciones de sustentación en sus extremos las frecuencias naturales de oscilación responden a expresiones similares a la siguiente como se demuestra en [3]:
42)(
mLEIkii πω = (2.69)
El análisis de esta expresión muestra que. al igual que sucede en los sistemas discretos, un aumento de masa (m) genera oscilaciones más lentas mientras que un incremento de rigidez (mayor EI o menor L) produce vibraciones más rápidas. En sistemas discretos de varios grados de libertad existen tantos modos propios de oscilación como grados de libertad, de forma análoga estos resultados muestran que en sistemas de parámetros distribuidos existen infinitos modos propios: no obstante, es obvio que la influencia de los modos superiores en la respuesta es escasa. 2.5.3. Superposición modal
Dado que, en principio, pueden existir infinitos modos propios de vibración la solución de la respuesta de un sistema estructuras modelizado mediante parámetros generalizados se expresa como suma de las soluciones particulares para cada frecuencia ωi:
∑ ∑∞
=
∞
=
==1 1
)()(),(),(i i
iii txtxytxy ηφ (2.70)
donde Φi(x) son las configuraciones de los modos propios (vectores modales) y ŋi(t) son las coordenadas modales. De forma similar al caso correspondiente a sistemas discretos, los modos propios son ortogonales respecto de la masa y de la rigidez.

















![1 1 1 1 1 1 1 ¢ 1 , ¢ 1 1 1 , 1 1 1 1 ¡ 1 1 1 1 · 1 1 1 1 1 ] ð 1 1 w ï 1 x v w ^ 1 1 x w [ ^ \ w _ [ 1. 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 ð 1 ] û w ü](https://static.fdocuments.net/doc/165x107/5f40ff1754b8c6159c151d05/1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-1-w-1-x-v.jpg)
