1 Ecuaciones de Movimiento
70
1. Ecuaciones de Movimiento Dr. Mart´ ın Velasco Villa Secci´ on de Mecatr´ onica Marzo de 2015
description
Ecuaciones de movimiento
Transcript of 1 Ecuaciones de Movimiento

1. Ecuaciones de Movimiento
Dr. Martın Velasco Villa
Seccion de Mecatronica
Marzo de 2015

Ejemplo introductorioConsidere la siguiente figura,
Segunda Ley de Newton:my = f −mg . (1)
Energıa cinetica:
K =1
2my2.
Energıa Potencial (debido a la gravedad):
P = mgy .
Notese que alternativamente puede escribirse:
my =d
dt(my ) =
d
dt
∂
∂y
(1
2my2
)=
d
dt
∂K
∂y
mg =∂
∂y(mgy ) =
∂P
∂y.

Definiendo: L = K − P = 12my2 −mgy y notando que,
∂L∂y
=∂K
∂yy
∂L∂y
= − ∂P
∂y.
La ecuacion (1) toma la forma:
d
dt
∂L∂y− ∂L
∂y= f , (2)
donde L se conoce como el Lagrangiano del sistema y (2) se conoce como la ecuacionde Euler–Lagrange.
I El proposito fundamental es obtener la dinamica del sistema a partir de lasecuaciones de Euler-Lagrange.
I Para un conjunto de coordenadas generalizadas (q1, . . . , qn) correspondientes aun sistema de n grados de libertad, encontrar las energıas cinetica y potencial K ,P y calcular las ecuaciones de movimiento considerando,
L = K − P
d
dt
∂L∂qk− ∂L
∂qk= τk , k = 1, . . . , n
τk : Fuerzas generalizadas asociadas a qk .

Manipulador de un eslabon
I Transmision de engranes entre el motor y el eslabon: θm = rθl , r : 1.
I r : relacion de transmision.
I M : Masa total del eslabon.
I Existe una relacion algebraica entre el motor y el eslabon. Entonces θm y θl sonlinealmente dependientes.
I El sistema solo tiene un grado de libertad.
I θm o θl pueden elegirse como coordenadas generalizadas.
I Considere θL como la coordenada generalizada.

Energıa cinetica y potencial del manipulador
Energıa Cinetica:
K =1
2Jm θ2
m +1
2Jl θ
2l =
1
2
(r2Jm + Jl
)θ2l
Jm: Inercia rotacional del motor.Jl : Inercia rotacional del eslabon.Energıa Potencial.
cos θL = hl =⇒ h = l cos θL
∆h+ l cos θL = l∆h = l (1− cos θL)
Entonces: P = Mgl (1− cos θL)

Definiedo J = r2Jm + Jl , el Lagrangiano del sistema toma la forma:
L =1
2J θ2
l −Mgl (1− cos θL) .
Considerando k = 1 y q = θL se obtiene,
d
dt
∂L∂q− ∂L
∂q= τl .
Bajo estas condiciones:
∂L∂θl
= J θl ,d
dt
∂L∂θl
=d
dt
(J θl)= J θl
∂L∂θL
= −Mgl sin θl .
Entonces,J θl +Mgl sin θl = τl
donde τl representa las fuerzas externas y torques que no se obtienen por una funcionpotencial.

En nuestro caso τl puede formarse por:
i) Torque del motor reflejado en el eslabon, u = rτm
ii) Torques de amortiguamiento Bm θm, Bl θl (Debidos en general a la friccion).
Entonces se tiene:
τl = u − rBm θl −Bl θl = u −B θl
B = rBm +Bl .
Por lo tanto, el modelo toma la forma,
J θl +B θl +Mgl sin θl = u.

Restricciones holonomas y trabajo virtual
Considere un sistema de k partıculas con vectores de posicion r1, . . . , rk .
I El movimiento libre de cada partıcula depende de las fuerzas externas aplicadas acada una de ella.
I Cuando el movimiento de las partıculas esta restringido, su aceleracion dependeno solo de las fuerzas externas sino tambien de las fuerzas de restriccion.
I Las fuerzas deben respetar las restricciones establecidas.
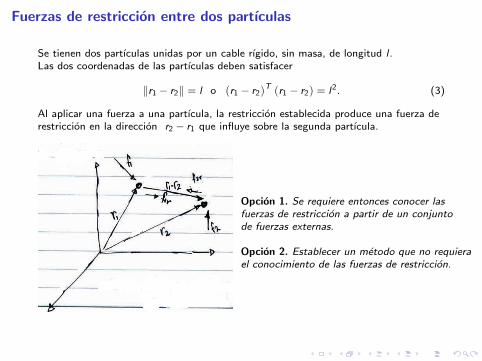
Fuerzas de restriccion entre dos partıculas
Se tienen dos partıculas unidas por un cable rıgido, sin masa, de longitud l .Las dos coordenadas de las partıculas deben satisfacer
‖r1 − r2‖ = l o (r1 − r2)T (r1 − r2) = l2. (3)
Al aplicar una fuerza a una partıcula, la restriccion establecida produce una fuerza derestriccion en la direccion r2 − r1 que influye sobre la segunda partıcula.
Opcion 1. Se requiere entonces conocer lasfuerzas de restriccion a partir de un conjuntode fuerzas externas.
Opcion 2. Establecer un metodo que no requierael conocimiento de las fuerzas de restriccion.

Restriccion Holonoma
Definicion 1 (Restriccion Holonoma)
Una restriccion de las coordenadas r1, . . . , rk es Holonoma si puede expresarse en laforma,
gi (r1, . . . , rk ) = 0, i = 1, . . . , l . (l restricciones) (4)
I La restriccion (3) es un ejemplo de restriccion holonoma.
Diferenciando la ecuacion (4) se obtiene,
dgi =
[∂gi∂r1
∂gi∂r2
· · · ∂gi∂rk
] dr1
dr2
...drk
= ∑k
j=1∂gi∂rj
drj .
(5)

Restriccion No Holonoma
Una restriccion de la forma,k
∑j=1
wjdrj = 0 (6)
es no holonoma si no puede ser integrada para obtener una restriccion en la forma (4).Equivalentemente:
Definicion 2Una restriccion de la forma
J (q) q = 0 (7)
es no holonoma si no es integrable. Es decir, si no existe una funcion F (q) tal que,
J (q) =∂F (q)
∂q. (8)

Ejemplo. Movimiento de una rueda en un plano
Considere las coordenadas generalizadas x1, x2, θ.
Notese que la rueda solo puede desplazarse en la direccion vp , entonces vort = 0.Por otra parte, en la direccion de la velocidad ortogonal se tiene,
cos(
π − π
2− θ)=−x1
vorty sin
(π − π
2− θ)=
x2
vort,
esto es,
sin θ =−x1
vorty cos θ =
x2
vort.

Por lo tanto,−x1 = vort sin θ, x2 = vort cos θ
de donde se obtiene,
−x1 sin θ = vort sin2 θ, x2 cos θ = vort cos2 θ.
Entonces,−x1 sin θ + x2 cos θ = vort .
Como vort = 0 , la ecuacion anterior puede reescribirse con respecto a las coordenadas
generalizadas q =[
x1 x2 θ]T
en la forma,
[− sin θ cos θ 0
] x1
x2
θ
= 0. (9)
Esto es,J (q) q = 0,
donde J (q) =[− sin θ cos θ 0
].

La restriccion anterior sera holonoma si J (q) es integrable, esto es, si existe F (q) talque:
∂F
∂q=[
∂F∂x1
∂F∂x2
∂F∂θ
]= J (q)
o de manera equivalente,
∂F
∂x1= − sin θ,
∂F
∂x2= cos θ,
∂F
∂θ= 0. (10)
Si F (q) y sus derivadas parciales son continuas, entonces,
∂
∂x1
∂F
∂x2=
∂
∂x2
∂F
∂x1,
∂
∂θ
∂F
∂x2=
∂
∂x2
∂F
∂θ,
∂
∂x1
∂F
∂θ=
∂
∂θ
∂F
∂x1. (11)
Si existe F que satisface (10) entonces tambien debe satisfacer (11),
∂
∂θ
∂F
∂x2=
∂
∂θ(cos θ) = − sin θ,
∂
∂x2
∂F
∂θ=
∂
∂x2(0) = 0.
Por lo tanto no existe F tal que J (q) =∂F (q)
∂q y entonces la restriccion (9) es no
holonoma.

Observacion 3Una restriccion de velocidad holonoma (integrable) se puede obtener al considerar unarestriccion geometrica de la forma,
F (q) + k = 0. (12)
la cual al ser derivada produce,
d
dt(F (q) + k) =
∂F (q)
∂q
∂q
∂t= J (q) q = 0. (13)
Entonces, una restriccion en la forma (3) o (4) siempre es holonoma.

Restricciones y grados de libertad
Considere un conjunto de k coordenadas r1, . . . , rk sujetas a un conjunto de lrestricciones holonomas, independientes,
gi (r1, . . . , rk ) = 0, i = 1, . . . , l . (14)
Entonces el sistema tiene ahora k − l grados de libertad.Por lo tanto, el movimiento de las k partıculas puede expresarse en terminos de unnuevo conjunto de n coordenadas generalizadas q1, . . . , qn. Esto es, las coordenadas rise pueden expresar en funcion de las coordenadas qi en la forma,
ri = ri (q1, . . . , qn) , i = 1, . . . , k (15)
donde q1, . . . , qn es un conjunto independiente.
I En nuestro caso, las variables articulares q1, . . . , qn corresponden a coordenadasgeneralizadas en un robot manipulador de n eslabones.

Desplazamientos Virtuales
Para el sistema de k partıculas r1, . . . , rk sujeto a las restricciones (14), un conjunto dedesplazamientos infinitesimales,
δr1, . . . , δrk (16)
que satisfacen las restricciones (14) son llamados ”desplazamientos virtuales”.
Considere de nuevo el conjunto de dos partıculas r1 y r2 sujetas a la restriccion (3),
‖r1 − r2‖ = l , (r1 − r2)T (r1 − r2) = l2. (17)
Sus desplazamientos virtuales,
r1 + δr1 y r2 + δr2 (18)
producen,
(r1 + δr1 − r2 − δr2)T (r1 + δr1 − r2 − δr2) = l2
[(r1 − r2) + (δr1 − δr2)]T [(r1 − r2) + (δr1 − δr2)] = l2
esto es,
(r1 − r2)T (r1 − r2) + (r1 − r2)
T (δr1 − δr2) + (δr1 − δr2)T (r1 − r2)
+ (δr1 − δr2)T (δr1 − δr2) = l2.

Considerando la ecuacion (17),
(r1 − r2)T (δr1 − δr2) + (δr1 − δr2)
T (r1 − r2) + (δr1 − δr2)T (δr1 − δr2) = 0,
esto es,
2 (r1 − r2)T (δr1 − δr2) = − (δr1 − δr2)
T (δr1 − δr2) = −‖δr1 − δr2‖2 . (19)
Considerando los terminos infinitesimales cuadraticos igual a cero se obtiene,
(r1 − r2)T (δr1 − δr2) = 0. (20)
Con lo cual, cualquier desplazamiento infinitesimal debe satisfacer la ecuacion (20).
Posibles desplazamientos virtuales:

Suponga que se satisfacen las relaciones (15), ri = ri (q1, . . . , qn). Bajo estas
condiciones dri =∂ri∂q dq. Entonces,
dri =
[∂ri∂q1
dq1 + . . . +∂ri∂qn
dqn
]=
n
∑j=1
∂ri∂qj
dqj =
[∂ri∂q1
. . .∂ri∂qn
]dq
esto es, considerando i = 1, ..., n, r =[
r1 · · · rn]T
,
dr =
∂r1∂q1
. . . ∂r1∂qn
.... . .
...∂rk∂q1
. . . ∂rk∂qn
dq =∂r
∂qdq.
Para cambios infinitesimales δri , δqi se obtiene,
δr =∂r
∂qδq
o, equivalentemente,
δri =n
∑j=1
∂ri∂qj
δqj , i = 1, . . . , k (21)
donde los desplazamientos virtuales δq1, . . . , δqn no estan sujetos a restricciones (ya seencuentran implıcitas en las relaciones ri ), por esta razon a las coordenadas qi se lesdenomina generalizadas.
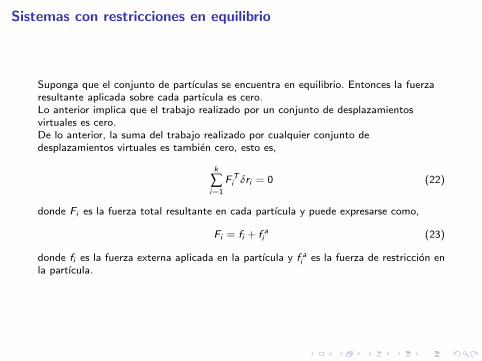
Sistemas con restricciones en equilibrio
Suponga que el conjunto de partıculas se encuentra en equilibrio. Entonces la fuerzaresultante aplicada sobre cada partıcula es cero.Lo anterior implica que el trabajo realizado por un conjunto de desplazamientosvirtuales es cero.De lo anterior, la suma del trabajo realizado por cualquier conjunto dedesplazamientos virtuales es tambien cero, esto es,
k
∑i=1
FTi δri = 0 (22)
donde Fi es la fuerza total resultante en cada partıcula y puede expresarse como,
Fi = fi + f ai (23)
donde fi es la fuerza externa aplicada en la partıcula y f ai es la fuerza de restriccion enla partıcula.

Supongase que el trabajo realizado por las fuerzas de restriccion correspondientes a unconjunto de desplazamientos virtuales es cero,
k
∑i=1
f aTi δri = 0. (24)
Considerando (23) y (24), la ecuacion (22) se transforma en,
k
∑i=1
f Ti δri = 0. (25)
I Notese que esta ecuacion no incluye las fuerzas de restriccion desconocidas.
Entonces se tiene.
Definicion 4 (Principio de trabajo virtual)
El trabajo realizado por fuerzas externas correspondientes a un conjunto dedesplazamientos virtuales es cero.
I Para que (25) sea cierta se requiere que las fuerzas de restriccion no produzcantrabajo, esto es, que se satisfaga (24).
I En el caso particular de las restricciones (17), ‖r1 − r2‖ = l ; partıculas unidasrıgidamente por cables sin masa; el principio de trabajo virtual se satisface.

En el caso de la restriccion (17), ‖r1 − r2‖ = l , las fuerzas de restriccion deben derespetar la direccion dada por el vector que conecta las partıculas.
i) La fuerza ejercida en ri debe ser de la forma:
f a1 = c (r1 − r2)
para algun c constante (que puede cambiar si la partıcula cambia de posicion)
ii) La fuerza ejercida sobre la segunda partıcula debe satisfacer,
f a2 = −c (r1 − r2) (ley de accion y reaccion)
Entonces,
k
∑i=1
f aTi δri = f aT1 δr1 + f aT2 δr2 = c (r1 − r2)T (δr1 − δr2) = 0
donde se ha considerado la ecuacion (20).
I Lo anterior puede generalizarse al caso de k partıculas.
I La restriccion anterior es equivalente a pedir que las distancias entre las partıculaspermanezcan constantes y por lo tanto el principio de trabajo virtual se satisfaceal considerar cuerpos rıgidos.

El principio de D’Alamber
Considere de nuevo la ecuacion (22),
k
∑i=1
FTi δri , (Fi = fi + f ai ) (26)
Se requiere transformar esta ecuacion a su representacion en coordenadasgeneralizadas.Para sistemas de partıculas que no se encuentran en equilibrio, el principio deD’Alambert establece que es posible introducir una fuerza ficticia adicional −Pi acada partıcula (Pi , momento de la partıcula i) de tal forma que cada partıcula este enequilibrio.Entonces, la ecuacion (26) puede modificarse al considerar Fi − Pi en lugar de Fi .

Considerando de nuevo el principio de trabajo virtual, es posible considerar que laecuacion (24) es valida, esto es,
k
∑i=1
f aTi δri = 0 (Trabajo producido por las fuerzas de restriccion es cero)
con lo cual,k
∑i=1
f Ti δri −k
∑i=1
PTi δri = 0. (27)
I Como δri no son independientes, la ecuacion (27) puede satisfacerse para δri 6= 0.
I Se requiere expresar la ecuacion (27) en terminos de las coordenadasgeneralizadas (las cuales son independientes).
Entonces a partir de (21), δri = ∑nj=1
∂ri∂qj
δqj , se obtiene,
k
∑i=1
f Ti δri =k
∑i=1
f Ti
n
∑j=1
∂ri∂qj
δqj =k
∑i=1
n
∑j=1
f Ti∂ri∂qj
δqj =n
∑j=1
Ψj δqj (28)
con
Ψj =k
∑i=1
f Ti∂ri∂qj
(29)
la j-esima fuerza generalizada.
I Notese que Ψj δqj tiene dimensiones de trabajo pero no necesariamente se cumpleque Ψj tenga dimensiones de fuerza y tampoco que δqj tenga dimensiones dedesplazamiento.

Por otra parte, como Pi = mi ri se tiene que,
k
∑i=1
PTi δri =
k
∑i=1
mi rTi δri =
k
∑i=1
n
∑j=1
mi rTi
∂ri∂qj
δqj . (30)
Notese ahora que,
d
dt
[mi r
Ti
∂ri∂qj
]= mi r
Ti
∂ri∂qj
+mi rTi
d
dt
[∂ri∂qj
]entonces,
mi rTi
∂ri∂qj
=d
dt
[mi r
Ti
∂ri∂qj
]−mi r
Ti
d
dt
[∂ri∂qj
]. (31)
Sumando los terminos anteriores para i = 1, . . . , k, se obtiene
k
∑i=1
mi rTi
∂ri∂qj
=k
∑i=1
{d
dt
[mi r
Ti
∂ri∂qj
]−mi r
Ti
d
dt
[∂ri∂qj
]}. (32)

Recuerdese que,ri = ri (q1, . . . , qn)
entonces,
ri =∂ri∂q
q =n
∑j=1
∂ri∂qj
qj = vi (33)
por lo tanto,∂ri∂q
=[
∂ri∂q1
· · · ∂ri∂qn
]=[
∂vi∂q1
· · · ∂vi∂qn
]entonces, elemento por elemento,
∂ri∂qj
=∂vi∂qj
. (34)

Ademas,
d
dt
[∂ri∂qj
]=[
∂∂q1
(∂ri∂qj
)q1 · · · ∂
∂qn
(∂ri∂qj
)qn
]=
n
∑l=1
∂2ri∂qj∂ql
ql . (35)
Entonces,
d
dt
[∂ri∂qj
]=[
∂∂q1
(∂ri∂qj
)q1 · · · ∂
∂qn
(∂ri∂qj
)qn
]=
∂
∂qj
[∂ri∂q1
q1 · · · ∂ri∂qn
qn
]=
∂
∂qj
n
∑j=1
∂ri∂qj
qj =∂vi∂qj
Por lo tanto, a partir de (33) se obtiene,
d
dt
[∂ri∂qj
]=
∂vi∂qj
. (36)

Sustituyendo las ecuaciones (33),(34) y (36) en la ecuacion (32) se obtiene,
k
∑i=1
mi rTi
∂ri∂qj
=k
∑i=1
{d
dt
[mi r
Ti
∂ri∂qj
]−mi r
Ti
d
dt
[∂ri∂qj
]}ri = vi ,
∂ri∂qj
=∂vi∂qj
,d
dt
[∂ri∂qj
]=
∂vi∂qj
k
∑i=1
mi rTi
∂ri∂qj
=k
∑i=1
{d
dt
[miv
Ti
∂vi∂qj
]−miv
Ti
∂vi∂qj
}. (37)
Definiendo la cantidad,
K =k
∑i=1
1
2miv
Ti vi (38)
como la energıa cinetica del sistema, se tiene que,
∂K
∂qj=
k
∑i=1
(1
2mi
∂vTi
∂qjvi +
1
2miv
Ti
∂vi∂qj
)=
k
∑i=1
mivTi
∂vi∂qj
y,
∂K
∂qj=
k
∑i=1
mivTi
∂vi∂qj
.

Por lo tanto, la ecuacion (37) toma la forma
k
∑i=1
mi rTi
∂ri∂qj
=d
dt
∂K
∂qj− ∂K
∂qj. (39)
Sustituyendo esta ultima ecuacion en (30) se obtiene,
k
∑i=1
PTi δri =
n
∑j=1
{d
dt
∂K
∂qj− ∂K
∂qj
}δqj . (40)
Por otra parte, como (27) esta dado por
k
∑i=1
f Ti δri −k
∑i=1
PTi δri = 0
sustituyendo (28) y (40), se obtiene,
n
∑j=1
Ψj δqj −n
∑j=1
{d
dt
∂K
∂qj− ∂K
∂qj
}δqj = 0.

Esto es,
n
∑j=1
{d
dt
∂K
∂qj− ∂K
∂qj−Ψj
}δqj = 0. (41)
Como δqj son independientes, se tiene entonces que
d
dt
∂K
∂qj− ∂K
∂qj= Ψj , j = 1, . . . , n. (42)
Supongase que la fuerza generalizada Ψj es la suma de una fuerza externa aplicada ala partıcula, mas el efecto debido a un campo potencial en la forma,
Ψj = −∂P
∂qj+ τj (43)
donde τj es una fuerza externa y P (q) es una funcion de energıa potencial(− ∂P
∂qj= fuerza
).

Entonces la ecuacion (42) toma la forma,
d
dt
∂K
∂qj− ∂K
∂qj= − ∂P
∂qj+ τj
d
dt
∂K
∂qj− ∂
∂qj(K − P) = τj (44)
con lo cual, definiendoL = K − P
la ecuacion (44) toma la forma
d
dt
∂L∂qj− ∂L
∂qj= τj , j = 1, . . . , n (45)
donde L = K − P es el Lagrangiano del sistema y la ecuacion (45) representa lasecuaciones de movimiento de Euler-Lagrange.

Energıa Cinetica y Potencial
I Para aplicar las ecuaciones de Lagrange a un robot manipulador es necesarioconocer las energıas cinetica y potencial de los eslabones como una funcion de losangulos y velocidades de las articulaciones.
I Se requiere un modelo de la distribucion de las masas en los eslabones.
I Considerando eslabones rıgidos, sus energıas cinetica y potencial pueden definirseen terminos de la masa total de cada eslabon y su momento de inercia alrededordel centro de masa.

Sea V ⊂ R3 el volumen ocupado por un cuerpo rıgido B y sea ρ (r ), r ∈ V ladistribucion de masa (densidad) del cuerpo.
I Si el eslabon se construye con un material homogeneo, ρ (r ) = ρ = cte.I La masa de un cuerpo se obtiene como,
M =∫V
ρ (r1) dV . (ρ = M/V ) (46)
I El centro de masa del cuerpo se obtiene en la forma,
CM =1
M
∫V
ρ (r1) r1dV =ρ
M
∫Vr1dV . (47)

Recuerdese que para un conjunto de partıculas de masa mi , el centro de masa resulta
CM =∑i mi ri
∑i mi=
1
M ∑i
mi ri (48)
donde mi es la masa de la i-esima partıcula y ri es el vector de posicion de la i-esimapartıcula con respecto al sistema de referencia.Para sistemas homogeneamente distribuidos:
CM =
∫rdm∫dm
=1
M
∫rdm.
Como dm = ρdV , entonces
CM =ρ
M
∫VrdV . (49)
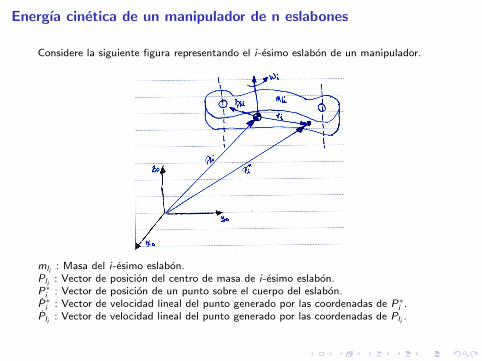
Energıa cinetica de un manipulador de n eslabones
Considere la siguiente figura representando el i-esimo eslabon de un manipulador.
mli : Masa del i-esimo eslabon.Pli : Vector de posicion del centro de masa de i-esimo eslabon.P∗i : Vector de posicion de un punto sobre el cuerpo del eslabon.P∗i : Vector de velocidad lineal del punto generado por las coordenadas de P∗i .Pli : Vector de velocidad lineal del punto generado por las coordenadas de Pli .

La energıa cinetica del i-esimo eslabon esta dada en general como,
Kli =1
2
∫Vli
P∗Ti P∗i ρdV (50)
ρ : Densidad de una partıcula elemental sobre el eslabon de volumen dV .Vli : Volumen del i-esimo eslabon.
Considere los vectores de posicion P∗i y Pli de dos partıculas sobre el eslabon, Pliposicionando el centro de masa. Entonces
ri =[
rix riy riz]T
= P∗i − Pli (51)
Las coordenadas del centro de masa se obtiene como,
Pli =1
mli
∫Vli
P∗i ρdV (52)

La velocidad del punto P∗i sobre el eslabon puede expresarse partir de la relacion develocidad de dos puntos sobre un cuerpo rıgido como,
P∗i = Pli +wi × ri= Pli + S (wi ) ri
, S (wi ) =
0 −wiz wiy
wiz 0 −wix
−wiy wix 0
∈ SO(3) (53)
Pli : Velocidad lineal del centro de masa.wi : Velocidad angular del eslabon.
Sustituyendo (53) en la ecuacion (50) se obtiene,
Kli = 12
∫Vli
(Pli + S (wi ) ri
)T (Pli + S (wi ) ri
)ρdV
= 12
[∫Vli
PTliPli ρdV +
∫Vli
PTliS (wi ) riρdV +
∫Vli
[S (wi ) ri ]T S (wi ) riρdV
+∫Vli
[S (wi ) ri ]T Pli ρdV
](54)
Esto es,
Kli =1
2
[∫Vli
PTliPli ρdV + 2
∫Vli
PTliS (wi ) riρdV +
∫Vli
rTi ST (wi ) S (wi ) riρdV
](55)

Notese que la contribucion mutua entre los desplazamientos traslacional y rotacionales tal que, ∫
Vli
PTliS (wi ) riρdV = PT
liS (wi )
∫Vli
(P∗i − Pli
)ρdV . (56)
Considerando a partir de (52) que,
Plimli =∫Vli
P∗i ρdV ,
y como
mli =∫Vli
ρdV ,
entonces se obtiene,
Plimli = Pli
∫Vli
ρdV =∫Vli
P∗i ρdV .
Por lo tanto,
Pli
∫Vli
ρdV −∫Vli
P∗i ρdV = 0,
con lo cual, ∫Vli
(P∗i − Pli
)ρdV = 0.

De lo anterior, la ecuacion (56) resulta,∫Vli
PTliS (wi ) riρdV = 0. (57)
La contribucion traslacional en (55) produce,
1
2
∫Vli
PTliPli ρdV =
1
2mli P
TliPli . (58)
La contribucion rotacional toma la forma,
1
2
∫Vli
rTi ST (wi ) S (wi ) riρdV =1
2wTi
[∫Vli
ST (ri ) S (ri ) ρdV
]wi (59)
donde se ha considerado la propiedad,
S (wi ) ri = −S (ri )wi . (60)
Por otra parte, tomando en cuenta que
S (ri ) =
0 −riz riyriz 0 −rix−riy rix 0
. (61)

Entonces se obtiene,
ST (ri ) S (ri ) =
r2iy+ r2
iz−rix riy −rix riz
−rix riy r2ix+ r2
iz−riy riz
−rix riz −riy riz r2ix+ r2
iy
. (62)
La ecuacion (59) toma entonces la forma,
1
2
∫Vli
rTi ST (wi ) S (wi ) riρdV =1
2wTi
[∫Vli
ST (ri ) S (ri ) ρdV
]wi =
1
2wTi Iliwi (63)
donde,
Ili =
∫Vli
(r2iy+ r2
iz
)ρdV −
∫Vli
rix riy ρdV −∫Vli
rix riz ρdV
∗∫Vli
(r2ix+ r2
iz
)ρdV −
∫Vli
riy riz ρdV
∗ ∗∫Vli
(r2ix+ r2
iy
)ρdV
. (64)
Equivalentemente,
Ili =
Ilixx −Ilixy −Ilxz∗ Iliyy −Iliyz∗ ∗ Ilizz
. (Tensor de Inercia) (65)

I La posicion de i-esimo eslabon depende de la configuracion del manipulador y porlo tanto el tensor de inercia tambien depende de la configuracion del manipulador.
I Si la velocidad angular del i-esimo eslabon w ii se expresa con respecto a un marco
de referencia anclado en el eslabon (como en la convencion Denavit-Hartenberg)se obtiene
w ii = RT
i wi
(Riw
ii = wi
)(66)
donde Ri es la matriz de rotacion del i-esimo eslabon al marco inercial de la base.
I Con respecto a un marco sobre el i-esimo eslabon, el tensor de inercia esconstante.
I Sea I ili el tensor referido al marco movil sobre el eslabon, es posible entoncesverificar que,
Ili = Ri IiliRTi (67)
Ili : Tensor de inercia referido al marco inercial de la base.
I Si la distribucion de masa del eslabon es simetrica con respecto al marco movilsobre el mismo, entonces los productos cruzados del tensor de inercia son cero(bajo un apropiado marco de referencia).

Considerando las contribuciones traslacional (58) y rotacional (63) se obtieneentonces,
Kli =1
2mli P
TliPli +
1
2wTi Ri I
iliRTi wi . (68)
I Las velocidades lineales y angulares de cualquier punto en un eslabon particularpueden expresarse en terminos de la matriz Jacobiana respectiva y las derivadasde las variables articulares.
Como en el caso de un manipulador, las variables articulares son en realidadcoordenadas generalizadas, se tiene entonces que para matrices Jacobianas apropiadas,
Jvi , Jwi
es posible escribir,Pli = Jvli
(q) q, wi = Jwli(q) q. (69)
Se obtiene entonces,
Kli =1
2mli q
T JTvli(q) Jvli
(q) q +1
2qT JTwli
(q)Ri (q) IiliRTi (q) Jwli
(q) q. (70)

La energıa cinetica total del manipulador toma entonces la forma,
K =1
2qT
[n
∑i=1
{mli J
Tvli
(q) Jvli(q) + JTwli
(q)Ri (q) IiliRTi (q) Jwli
(q)}]
q
=1
2qTD (q) q
(71)
donde,
D (q) =
[n
∑i=1
{mli J
Tvli
(q) Jvli(q) + JTwli
(q)Ri (q) IiliRTi (q) Jwli
(q)}]
(72)
es una matriz de n× n dependiente de la configuracion del manipulador, llamadaMatriz de Inercia.
I La matriz de inercia es simetrica, definida positiva, para cualquier manipulador.
I La simetrıa de D (q) se obtiene directamente de la estructura de (72).
I La positividad de D (q) se obtiene del hecho que la energıa cinetica es siempre nonegativa y es cero si y solo si todas las velocidades articulares son cero.

Energıa Potencial de un manipulador de n eslabones
La energıa potencial almacenada en un manipulador de n eslabones esta dada por lasuma de las contribuciones relativas de cada eslabon, esto es,
P =n
∑i=1
Pi . (73)
Bajo la suposicion de eslabones rıgidos, la contribucion debida a la fuerza gravitacionalse expresa como,
Pi =∫Vli
gT0 P∗i ρdV = mli g
T0 Pli (74)
donde se ha considerado, ∫Vli
P∗i ρdV = Pli
∫Vli
ρdV . (75)
El vector de aceleracion de la gravedad g0 en el marco inercial esta dado en la forma,
g0 =[
0 0 −g]T
. (76)
Entonces la energıa potencial esta dada por,
P =n
∑i=1
mli gT0 Pli . (77)
Notese que el calculo anterior se realiza considerando los centros de masa de cada unode los eslabones.

Tensor de Inercia de un cuerpo solido uniforme
Recuerdese que:
Ixx =∫Vli
(r2iy+ r2
iz
)ρdV
Iyy =∫Vli
(r2ix + r2
iz
)ρdV
Izz =∫Vli
(r2ix+ r2
iy
)ρdV
Ixy = Iyx =∫Vli
rix riy ρdV
Ixz = Izx =∫Vli
rix riz ρdV
Iyz = Izy =∫Vli
riy riz ρdV
(78)

Calculo de los elementos del Tensor de Inercia
Entonces se tiene que,
Ixx =∫∫∫ (
y2 + z2)
ρdxdydzIyy =
∫∫∫ (x2 + z2
)ρdxdydz
Izz =∫∫∫ (
x2 + y2)
ρdxdydz
Ixy = Iyx =∫∫∫
xyρdxdydzIxz = Izx =
∫∫∫xzρdxdydz
Iyz = Izy =∫∫∫
yzρdxdydz(79)
I Se considera una densidad constante ρ (x , y , z) = ρ.

Entonces en los ejes moviles sobre el cuerpo rıgido,
Ixx =∫ c
2
− c2
∫ b2
− b2
∫ a2
− a2
(y2 + z2
)ρdxdydz =
∫x
∫y
(y2 + z2
)ρx
∣∣∣∣ a2− a
2
dydz
= a∫ c
2
− c2
[∫ b2
− b2
(y2 + z2
)ρdy
]ρdz
= a∫ c
2
− c2
[∫ b2
− b2
y2ρdy +∫ b
2
− b2
z2ρdy
]dz
= aρ∫ c
2
− c2
[1
3y3
∣∣∣∣ b2− b
2
+ z2y∣∣ b2− b
2
]dz = aρ
∫ c2
− c2
[1
3
{b3
8−(−b
2
)3}+ z2b
]dz
= aρ∫ c
2
− c2
[2
3
b3
8+ z2b
]dz.

Continuando de esta forma,
Ixx = ρab∫ c
2
− c2
[2
3
b2
8+ z2
]dz
= ρab
[1
12b2z
∣∣∣∣ c2− c
2
+1
3z3
∣∣∣∣ c2− c
2
]
= ρab
{[1
12b2c
]+
1
3
[c3
8−(− c
2
)3]}
= ρab
[b2c
12+
c3
12
]=
ρabc
12
(b2 + c2
).
Considerando que la masa total m esta dada como m = ρabc, se obtiene,
Ixx =m
12
(b2 + c2
).

De manera similar es posible obtener,
Iyy =m
12
(a2 + c2
), Izz =
m
12
(a2 + b2
).
Notese por otra parte que,
Ixy = Iyx =∫ c
2
− c2
∫ b2
− b2
∫ a2
− a2
xydxdydz
=∫ c
2
− c2
∫ b2
− b2
y
2x2∣∣∣ a2− a
2
dydz
=∫ c
2
− c2
∫ b2
− b2
y
2
[a2
4− a2
4
]dydz = 0.
De la misma forma,Ixz = Izx = 0, Iyz = Izy = 0.

Ecuaciones de movimiento de un robot manipulador
La dinamica de un robot manipulador se obtiene bajo las siguientes condiciones:
i) La energıa cinetica es una funcion cuadratica de la velocidad q ,
K =1
2qTD (q) q =
1
2 ∑ij
dij (q) qi qj (80)
donde dij son elementos de la matriz de inercias D (q) ∈ Rn×n la cual es simetricay definida positiva.
ii) La energıa potencial P = P (q) es independiente de q.
I Los manipuladores rıgidos satisfacen siempre las condiciones anteriores.
Las ecuaciones de E-L dadas en (45) pueden reescribirse en funcion del Lagrangiano,
L = K − P =1
2 ∑ij
dij (q) qi qj − P (q) , (81)
de donde se obtiene,
∂L∂qk
=∂K
∂qk=
∂
∂qk
[1
2 ∑ij
dij (q) qi qj
]
=1
2 ∑j
dkj (q) qj +1
2 ∑i
dik (q) qi .

Como D (q) es simetrica (dkj = djk ) se obtiene,
∂L∂qk
= ∑j
dkj (q) qj , (82)
y por lo tanto,
d
dt
∂L∂qk
=d
dt
[∑j
dkj (q) qj
]= ∑
j
dkj (q) qj + ∑j
d
dt[dkj (q)] qj
= ∑j
dkj (q) qj + ∑j
[∑i
∂dkj (q)
∂qiqi
]qj
= ∑j
dkj (q) qj + ∑ij
∂dkj (q)
∂qiqi qj .
(83)

Por otra parte,
∂L∂qk
=∂
∂qk
[1
2 ∑ij
dij (q)qi qj − P (q)
]=
1
2 ∑ij
∂dij (q)
∂qkqi qj −
∂P (q)
∂qk.
(84)
De lo anterior, para cada k = 1, 2, . . . , n, las ecuaciones de E-L se pueden escribir en laforma (45), esto es,
d
dt
∂L∂qk− ∂L
∂qk= τk , k = 1, 2, . . . , n
con lo cual
∑j
dkj (q) qj + ∑ij
∂dkj (q)
∂qiqi qj −
1
2 ∑ij
∂dij (q)
∂qkqi qj +
∂P (q)
∂qk= τk
esto es
∑j
dkj (q) qj + ∑ij
{∂dkj (q)
∂qi− 1
2
∂dij (q)
∂qk
}qi qj +
∂P (q)
∂qk= τk . (85)

Por simplicidad defınase A = 12 ∑ij
{∂dkj∂qi
+ ∂dki∂qj
}qi qj y notese que,
A =1
2 ∑i
[{∂dk1
∂qi+
∂dki∂q1
}q1 +
{∂dk2
∂qi+
∂dki∂q2
}q2 + ... +
{∂dkn∂qi
+∂dki∂qn
}qn
]qi
=1
2
[{∂dk1
∂q1+
∂dk1
∂q1
}q1 +
{∂dk2
∂q1+
∂dk1
∂q2
}q2 + ... +
{∂dkn∂q1
+∂dk1
∂qn
}qn
]q1+
+1
2
[{∂dk1
∂q2+
∂dk2
∂q1
}q1 + ... +
{∂dkn∂q2
+∂dk2
∂qn
}qn
]q2 + ...+
+1
2
[{∂dk1
∂qn+
∂dkn∂q1
}q1 + ... +
{∂dkn∂qn
+∂dkn∂qn
}qn
]qn
=
[∂dk1
∂q1q1 +
{∂dk2
∂q1+
∂dk1
∂q2
}q2 + ... +
{∂dkn∂q1
+∂dk1
∂qn
}qn
]q1+
+
[∂dk2
∂q2q2 + ... +
{∂dkn∂q2
+∂dk2
∂qn
}qn
]q2 + ...+
+
[∂dkn∂qn
qn
]qn

Entonces se obtiene
A =
[∂dk1
∂q1q1 +
∂dk1
∂q2q2 + ... +
∂dk1
∂qnqn
]q1 +
[∂dk2
∂q1q2 + ... +
∂dkn∂q1
qn
]q1
+
[∂dk2
∂q2q2 + ... +
∂dk2
∂qnqn
]q2 +
[∂dk3
∂q2q3 + ... +
∂dkn∂q2
qn
]q2 + ...
+∂dkn∂qn
qnqn
=
[∂dk1
∂q1q1 + ... +
∂dk1
∂qnqn
]q1 +
[∂dk2
∂q1q1 +
∂dk2
∂q2q2 + ... +
∂dk2
∂qnqn
]q2
+
[∂dkn∂q1
q1 +∂dkn∂q2
q2 + ... +∂dkn∂qn
qn
]qn
=
[∑i
∂dk1
∂qiqi
]q1 + ... +
[∑i
∂dkn∂qi
qi
]qn
= ∑j
∑i
∂dkj∂qi
qi qj = ∑ij
∂dkj∂qi
qi qj .

Entonces,
∑ij
{∂dkj∂qi
}qi qj =
1
2 ∑ij
{∂dkj∂qi
+∂dki∂qj
}qi qj (86)
por lo tanto,
∑ij
{∂dkj∂qi− 1
2
∂dij∂qk
}qi qj = ∑
ij
1
2
{∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}qi qj
= ∑ij
Cijk qi qj .(87)
Donde se ha definido,
Cijk =1
2
{∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}. (88)
Los terminos Cijk se conocen como Sımbolos de Chistoffel (de primera clase).Notese que para k fijo, se tiene que,
Cijk = Cjik . (89)

Definiendo en general los terminos provenientes de la energıa potencial en la forma,
gk =∂P
∂qk, (90)
las ecuaciones de E-L se escriben como
n
∑j=1
dkj (q) qj +n
∑i=1
n
∑j=1
Cijk (q) qi qj + gk (q) = τk , k = 1, . . . , n. (91)
Notese que la ecuacion (91) esta formada por terminos de la forma:
1. Segundas derivadas de las coordenadas generalizadas.
2. Terminos cuadraticos de las derivadas de q con coeficientes posiblementedependientes de q.
2.1 Los terminos de la forma q2i son llamados Centrıfugos.
2.2 Los terminos de la forma qi qj , i 6= j son llamados de Coriolis.
3. Terminos dependientes solo de q se obtienen a partir de la energıa potencial.

La ecuacion (91) puede reescribirse en la forma
n
∑j=1
d1j (q) qj +n
∑i=1
n
∑j=1
Cij1 (q) qi qj + g1 (q) = τ1
...n
∑j=1
dnj (q) qj +n
∑i=1
n
∑j=1
Cijn (q) qi qj + gn (q) = τn
(92)
Equivalentemente,
[d11 · · · d1n
]q +
[n
∑i=1
Ci11 (q) qi · · ·n
∑i=1
Cin1 (q) qi
]q + g1 (q) = τ1
...[dn1 · · · dnn
]q +
[n
∑i=1
Ci1n (q) qi · · ·n
∑i=1
Cinn (q) qi
]q + gn (q) = τn
(93)

Con lo cual es posible obtener la representacion,
D (q) q + C (q, q) q + g (q) = τ, (94)
donde,τ = [τ1, . . . , τn ]
T , g (q) = [g1, . . . , gn ]T , q = [q1, . . . , qn ]
T .
Los elementos (k, j) de la matriz C (q, q) pueden escribirse como,
Ckj =n
∑i=1
Cijk (q) qi
=n
∑i=1
1
2
{∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}qi .
(95)

Propiedades de las ecuaciones dinamicas
Los desarrollos presentados anteriormente llevaron a la obtencion del modelo general,
D (q) q + C (q, q) q + g (q) = τ, (96)
donde,
D (q) =
[n
∑i=1
{mli J
Tvli
(q) Jvli(q) + JTwli
(q)Ri (q) IiliRTi (q) Jwli
(q)}]
.
Los elementos de la matriz C (q, q) estan dados por,
Ckj =n
∑i=1
Cijk (q) qi
=n
∑i=1
1
2
{∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}qi .

Matriz de Inercia
La matriz D (q) satisface,
I D (q) ∈ Rn×n es simetrica definida positiva.
I D−1 (q) existe y es definida positiva dado que D (q) es de rango pleno.
Para robots con solo articulaciones rotacionales:
a) La matriz D (q) satisface,
‖D (x) z −M (y ) z‖ ≤ km ‖x − y‖ ‖z‖ , x , y , z,∈ Rn (97)
donde km puede obtenerse como
km ≥(
maxijkq
∣∣∣∣ ∂dij (q)∂qk
∣∣∣∣)con dij elementos de la matriz D (q).
b) La matriz D (q) es tal que,
‖D (x) y‖ ≤ km ‖y‖ , ∀x , y ,∈ Rn, km ∈ R+. (98)

En general se tiene que como D (q) es definida positiva, la funcion V : Rn × R+
definida como,V (q, q) = qTD (q) q
es tambien positiva definida.Considerando que la energıa Cinetica tiene la forma,
K =1
2qTD (q) q,
se tiene entonces que V se expresa como,
V (q, q) = 2K .

Matriz de Coriolis
I La matriz C (q, q) puede no ser unica, pero el producto C (q, q) q es unico.
I Si q = 0, entonces C (q, 0) = 0, ∀q ∈ Rn.
I Para cualesquier vectores q, x , y , z ∈ Rn y cualquier escalar α, se tiene que,
C (q, x) y = C (q, y ) x
C (q, z + αx) y = C (q, z) y + αC (q, x) y .
Demostracion: Recuerdese que
C (q, q) q =
∑ni=1 Ci11 (q) qi · · · ∑n
i=1 Cin1 (q) qi...
. . ....
∑ni=1 Ci1n (q) qi · · · ∑n
i=1 Cinn (q) qi
q.

Entonces, C (q, x) y puede escribirse como,
C (q, x) y =
∑ni=1 Ci11 (q) xi · · · ∑n
i=1 Cin1 (q) xi...
. . ....
∑ni=1 Ci1n (q) xi · · · ∑n
i=1 Cinn (q) xi
y1
...yn
=
C111 (q) x1 + · · ·+ Cn11xn . . . C1n1 (q) x1 + · · ·+ Cnn1xn...
. . ....
C11n (q) x1 + · · ·+ Cn1nxn . . . C1nn (q) x1 + · · ·+ Cnnnxn
y
que puede escribirse en la forma,
C (q, x) y =
xT
C111
C211
...Cn11
· · · xT
C1n1
C2n1
...Cnn1
...
. . ....
xT
C11n
C21n
...Cn1n
· · · xT
C1nn
C2nn
...Cnnn
y .

Por lo tanto,
C (q, x) y =
xT
C111 · · · C1n1
C211 · · · C2n1
.... . .
...Cn11 · · · Cnn1
y
...
xT
C11n · · · C1nn
C21n · · · C2nn
.... . .
...Cn1n · · · Cnnn
y
=
xTC1 (q) yxTC2 (q) y
...xTCn (q) y
, Ci ∈ Rn×n.
Como los sımbolos de Christoffel estan dados por,
Cijk =1
2
{∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}entonces se tiene que,
Cijk =1
2
{∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}y Cjik =
1
2
{∂dki∂qj
+∂dkj∂qi− ∂dji
∂qk
}. (99)

Considerando que D (q) es simetrica se tiene que Cijk = Cjik .Evaluando los elementos de las matrices Ci (q) a partir de la propiedad anterior sepuede mostrar que estas matrices son simetricas.Por lo tanto se tiene,
C (q, x) y =
xTC1 (q) yxTC2 (q) y
...xTCn (q) y
=
yTCT
1 (q) xyTCT
2 (q) x...
yTCTn (q) x
=
yTC1 (q) xyTC2 (q) x
...yTCn (q) x
. (100)
Entonces se obtiene,C (q, x) y = C (q, y ) x .

Propiedad de antisimetriaConsidere la matriz de inercia D (q) y defınase C (q, q) en terminos de los sımbolos deChristoffel. Entonces la matriz,
N (q, q) = D (q)− 2C (q, q) , (101)
es antisimetrica. Los componentes de N satisfacen njk = −nkj .Demostracion: Los componentes de la derivada con respecto al tiempo de la matrizde inercia D (q) estan dados por,
dkj =n
∑i=1
∂dkj∂qi
qi . (102)
Por lo tanto, los elementos de N = D − 2C toman la forma
nkj = dkj − 2Ckj
=n
∑i=1
∂dkj∂qi
qi −n
∑i=1
Cijk (q) qi
=n
∑i=1
[∂dkj∂qi−{
∂dkj∂qi
+∂dki∂qj− ∂dij
∂qk
}]qi
=n
∑i=1
[∂dij∂qk− ∂dki
∂qj
]qi .
Por otra parte,
njk =n
∑i=1
[∂dik∂qj− ∂dji
∂qk
]qi , (103)
con lo cual,nkj = −njk . (104)

Propiedad de pasividad
La propiedad de pasividad de un robot rıgido se establece al satisfacer la condicionentrada–salida, ∫ T
0qT (ξ) τ (ξ) dξ ≥ −β, β ≥ 0, ∀T > 0. (105)
Como el producto qT τ tiene unidades de potencia,∫ T
0qT (ξ) τ (ξ) dξ
corresponde a la energıa producida por el sistema en el intervalo [0,T ].Entonces, la cantidad de energıa disipada por el sistema tiene una cota inferior −β.Notese que la energıa total H del sistema, es simplemente,
H =1
2qTD (q) q + P (q) , (106)
entonces,
H =1
2qTD (q) q +
1
2qTD (q) q +
1
2qT D (q) q +
∂P
= qTD (q) q +1
2qT D (q) q + qT
∂P
∂q
= qT {τ − C (q, q) q − g (q)}+ 1
2qT D (q) q + qT
∂P
∂q.

Como g (q) = ∂P∂q se obtiene entonces,
H = qT {τ − C (q, q) q}+ 12 q
T D (q) q= qT τ + 1
2 qT{D (q)− 2C (q, q)
}q
= qT τ.(107)
Integrando esta ultima ecuacion,∫ T
0qT (ξ) τ (ξ) dξ =
∫ T
0H (ξ) dξ = H (T )−H (0)
con lo cual, ∫ T
0q (ξ) τ (ξ) ≥ −H (0) (108)
dado que la energıa total es no negativa.

Cotas de la Matriz de Inercia
Para un valor fijo de las coordenadas generalizadas q, sean
0 < λ1 (q) ≤ λ2 (q) ≤ . . . ≤ λn (q) , (109)
los valores propios de la matriz D (q).Como D (q) es simetrica, definida positiva,
λ1, . . . , λn,
son reales positivos. Entonces se obtiene,
λ1 (q) In×n ≤ D (q) ≤ λn (q) In×n (110)
donde se considera que si,
I B < A es equivalente a que A−B sea definida positiva
I B ≤ A entonces A−B es semidefinida positiva.
Si todas las uniones de un robot son rotacionales, entonces los elementos de D (q)consideran senos y cosenos y por lo tanto se pueden acotar en funcion de lascoordenadas generalizadas.Entonces es posible mostrar que,
λmIn×n ≤ D (q) ≤ λM In×n < ∞ (111)
donde λm, λM son independientes de q.

Cota de la matriz de CoriolisLa matriz de Coriolis satisface,
‖C (q, x) y‖ ≤ kc ‖x‖ ‖y‖ , q, x , y ∈ Rn. (112)
Demostracion. Considerando que (ec. (100)),
C (q, x) y =
xTC1yxTC2y
...xTCny
,
entonces,
‖C (q, x) y‖2 =n
∑i=1
(xTCi (q) y
)2
=n
∑i=1
∣∣∣xTCi (q) y∣∣∣2 .
Por lo tanto, dado que∥∥xTAy∥∥ ≤ ‖A‖ ‖x‖ ‖y‖ se obtiene,
‖C (q, x) y‖2 ≤[
n
∑k=1
‖Ck (q)‖2
]‖x‖2 ‖y‖2 = k2
c ‖x‖2 ‖y‖2 .
Entonces,‖C (q, x) y‖ ≤ kc ‖x‖ ‖y‖ .
La norma espectral de A es el valor singular mas grande σmax de A.
σmax (A) =√
λmax (ATA) = ‖A‖2 .