09 Exercise DH KukaLWR - uniroma1.itdeluca/rob1_en/09_Exercise_DH_KukaLWR4.… ·...
8
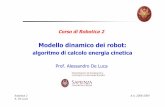
KUKA LWR-IV ! 7R manipulator: spherical shoulder (3R), elbow joint (1R), spherical wrist (3R) ! the robot is shown in its zero configuration (q=0) ! positive directions of joint rotations are indicated 1 J1 J3 J5 J7 side view (from observer in V) V J2 J4 J6 L M lengths in [mm] joint ranges in [deg] frontal view p W center of wrist
Transcript of 09 Exercise DH KukaLWR - uniroma1.itdeluca/rob1_en/09_Exercise_DH_KukaLWR4.… ·...

KUKA LWR-IV
! 7R manipulator: spherical shoulder (3R), elbow joint (1R), spherical wrist (3R)
! the robot is shown in its zero configuration (q=0) ! positive directions of joint rotations are indicated
1
J1
J3
J5
J7
side view (from observer in V)
V
J2
J4
J6
L
M lengths in [mm]
joint ranges in [deg]
frontal view
pW center of wrist

KUKA LWR-IV in motion
videos at DIAG Robotics Lab
VREP video
side view from observer in V
2

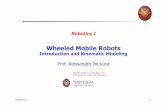
KUKA LWR-IV
! determine ! frames and table of D-H parameters
! be consistent with positive rotations indicated by KUKA
! only the two kinematic lengths L and M should be needed
! homogeneous transformation matrices ! direct kinematics of the center of wrist pW in
symbolic form ! numerically, in the configuration q = (0, !/2, !/2, -!/2, 0, !/2, 0) [rad] the position 0pd in frame 0 of a tool point Pd
whose coordinates in frame 7 are given by 7pd = (0, 0.05, 0.1) [m]
J1
J3
J5
J7
J2
J4
J6
L
M
frontal view
pW center of wrist
3

Assignment of D-H frames
side view (from observer in V) J1
J3
J5
J7
frontal view
y6
V
z1
z2
z4
z6
z7
y7
z3 y4
y5 z5
y3
y1
y0 y2
z0
W=O5=O6=O7 (wrist center)
S=O0=O1=O2 (shoulder center)
O3=O4 (elbow)
x1 x2
x3
x0
x4
x5 x6 x7
zero configuration!
J4
J6
J2
steps!
4

Table of D-H parameters
i "i di ai #i
1 !/2 0 0 q1=0
2 -!/2 0 0 q2=0
3 -!/2 L 0 q3=0
4 !/2 0 0 q4=0
5 !/2 M 0 q5=0
6 -!/2 0 0 q6=0
7 0 0 0 q7=0
with
d3 = L = 0.40, d5 = M = 0.39 [m]
in the shown configuration
5
J1
J3
J5
J7
z0
z3
z5 y6
z6
z1
z2
z4
z7
y7
y4
y5
y3
y1
y0 y2
J4
J6
J2

D-H homogeneous matrices output from Matlab (symbolic) program
6

Direct kinematics of the wrist center
output from Matlab (symbolic) program
pW,hom = A1(q1)A2(q2)A3(q3)A4(q4)A5(q5)A6(q6)A7(q7) [0 0 0 1]T
= A1(q1)A2(q2)A3(q3)A4(q4) [0 0 M 1]T
these can be replaced (by inspection) with [0 0 M 1]T
the last three (spherical) joints do not move W
faster (symbolic) recursive position transformations (matrix ・ vector products, in homogenous coordinates)
7

Tool position evaluation
output from Matlab (numerical) program
0pd,hom = A1(q1)A2(q2)A3(q3)A4(q4)A5(q5)A6(q6)A7(q7) 7pd,hom
! in the given configuration q = (0, !/2, !/2, -!/2, 0, !/2, 0) [rad] for the tool point Pd of coordinates (in frame 7) 7pd = (0, 0.05, 0.1) [m]
again, (numerical) recursive position transformations (matrix ・ vector products) etc.
numerical evaluation of symbolic quantities
7pd in homogeneous coordinates
y7
z7 7pd
8