document
10
0. Time-Continous Stochastic Processes 0. Time Continous Stochastic Processes process X(t) Ö single realisation of X(t) : sample function x(t) • A process is stationary , if the ensemble averages (moments, autocorrelation function, cross-correlation function, probability density functions) are independent of time. • If you can calculate the expected values of a process by averaging one sample function in time domain instead of averaging an ensemble of sample functions instead of averaging an ensemble of sample functions, then the process is ergodic. • An ergodic process is always stationary too An ergodic process is always stationary too , but a stationary process need not to be ergodic. • We will only consider ergodic processes on the next slides. Correlation Functions 0-1
description
time correction
Transcript of document

0. Time-Continous Stochastic Processes0. Time Continous Stochastic Processesprocess X(t) single realisation of X(t) : sample function x(t)
• A process is stationary, if the ensemble averages (moments, autocorrelation function, cross-correlation function, probability density functions) are independent of time.
• If you can calculate the expected values of a process by averaging one sample function in time domaininstead of averaging an ensemble of sample functionsinstead of averaging an ensemble of sample functions, then the process is ergodic.
• An ergodic process is always stationary tooAn ergodic process is always stationary too , but a stationary process need not to be ergodic.
• We will only consider ergodic processes on the next slides.
Correlation Functions0-1
y g p

Time-Continous Stochastic ProcessesTime Continous Stochastic Processesprocess , function :( )( )tXg( )tX
∞ 2/T
moments ( )( ){ }tXgE ( ) ( ) =⋅= ∫∞−
dxxpxg X ( )( )∫−
∞→
2/
2/
1limT
TTT
dttxg
∞
{ } ( ) XX dxxpxX μ=⋅= ∫∞
∞−
E1st moment:
{ } ( )∫∞
∞−
⋅= dxxpxX X22E2nd moment:
{ } { } { }( ) ( )∫∞
∞−
⋅−==−=− dxxpxXXX XXXX22222 EEE μσμvariance:
Power Density Spectrum0-2
∞−

Correlation Functions of Continous Processes
autocorrelation function (ACF) of a complex-valued process X(t):
( ) ( ) ( ){ } ( ) ( )( ) ( ) ( )( ){ }22112121 EE, ττττττττ IRIRXX jXXjXXXXr +⋅−=⋅= ∗
stationary processes: τττ +tt 21 , ( ) ( ) ( ){ }ττ +⋅= ∗ tXtXrXX E
autocovariance function:
( ) ( )[ ] ( )[ ]{ } ( ) 2E XXXXXXX rtXtXc μτμτμτ −=−+−= ∗∗
cross correlation function (CCF) of two processes X(t) and Y(t):
zero mean processes ( ) ( )ττ XXXX rc =
cross-correlation function (CCF) of two processes X(t) and Y(t):
( ) ( ) ( ){ }2121 E, ττττ YXrXY ⋅= ∗ stationary ( ) ( ) ( ){ }ττ +⋅= ∗ tYtXrXY E
Correlation Functions0-3

Correlation Functions of Continous ProcessesCorrelation Functions of Continous Processescharacteristics of ACF
( ) ( )ττ ∗=− XXXX rr• ( ) ( )ττ XXXX rr =−real processes ACF is even
•
•
( ){ } ( )0max XXXX rr =ττ
( ) ( ) ( ){ } ( ){ }2EE0 tXtXtXrXX =⋅= ∗ zero mean 2Xσ( ) =0XXr( ) ( ) ( ){ } ( ){ }EE0 tXtXtXrXX Xσ( )XX
characteristics of CCF
( ) ( )∗ ( ) ( )( ) ( )ττ ∗=− YXXY rr•
• ( ) ( ) YXXYXY rc μμττ ⋅−= ∗
( ) ( )ττ YXXY rr =−real processes
cross-covariance
• uncorrelated processes:
• orthogonal processes: ( ) 0=τXYr( ) ( ) YXXYXY rc μμττ ⋅== ∗0
0=YX μμuncorr. processes with or
Correlation Functions0-4
( )

Power Density Spectrum(Power Density Spectrum, PDS)
• definition (Wiener-Khintshine theorem)
explanation of plausibility:see slide 9{ } τττω τω derrjS j
XXXXXX ∫∞
∞−
−== )()()( F
ACF is conjugate even power density spectrum is real
• process average power (zero mean):
{ } ∫∞
∞−
=== )0()(21)(Var 2
XXXXX rdjStX ωωπ
σ
• white noise: PDS is a constant ( infinite power only a model)• white noise: PDS is a constant ( infinite power only a model)
{ } )(2/2/)(
- with 2/)(1
0
τδτ
ωω
==
∞<<∞=− NNr
NjSXXF
Power Density Spectrum0-5
{ } )(2/2/)( 000 τδτ ⋅== NNrXX F

Definition of Wiener-Khintschine : explanation of plausibilityplausibility
finite sample function: otherwise
if0
)()(
TtTtxtxT
≤≤−
⎩⎨⎧
= ( )ωjXT
finite energy: ( ) ( ) ωωπ djXdttxT
TTT∫ ∫
−
∞
∞−
= 2212 Theorem of Parseval
T
average power: PDS of sample func.( )∫ ∫∞
∞
=T
TTT ddttx ωπ2
1221 ( ) 2
21 ωjXTT
definition: PDS of the ergodic process X(t)f l f ti ith i fi it l th
− ∞−T
mean of a sample function with infinite length :
( ) ( ) 221lim ωω jXjS TTTXX ⋅=
∞→
Power Density Spectrum0-6
→

Definition of Wiener-Khintschine : explanation of plausibilityplausibility
Wiener-Khintschine: ( )τXXr( ) ( ){ } ∫∞
−== ττω τω derjS jXXXX F
ergodic processes: ( ) ( ){ }τ+← ∗ tXtXE ( ) ( )dttxtxT
TTTTT ∫
−
∗
∞→+⋅ τ2
1lim( ) =τXXr
∞−
( )ωjS == ∫∞
− ττω de j( ) ( )dttxtxT
TT∫ ∗ +⋅ τ1lim( )ωjSXX ∫∞−
τde( ) ( )dttxtxT
TTTT ∫−
∞→+τ2lim
( ) ( ) ωjexx −∗ += 1lim ∫T
dττ τ dtttT
∫ ( ) ( ) ωjexx −∗ += 1lim dtttT
∫ ττ τ dT
∫( ) ( )TTTTexx
∞→+⋅= 2lim ∫
−T
dττ dtttT∫−
( ) ( )TTTTexx
∞→+= 2lim dttt
T∫−
ττ dT∫−
Power Density Spectrum0-7
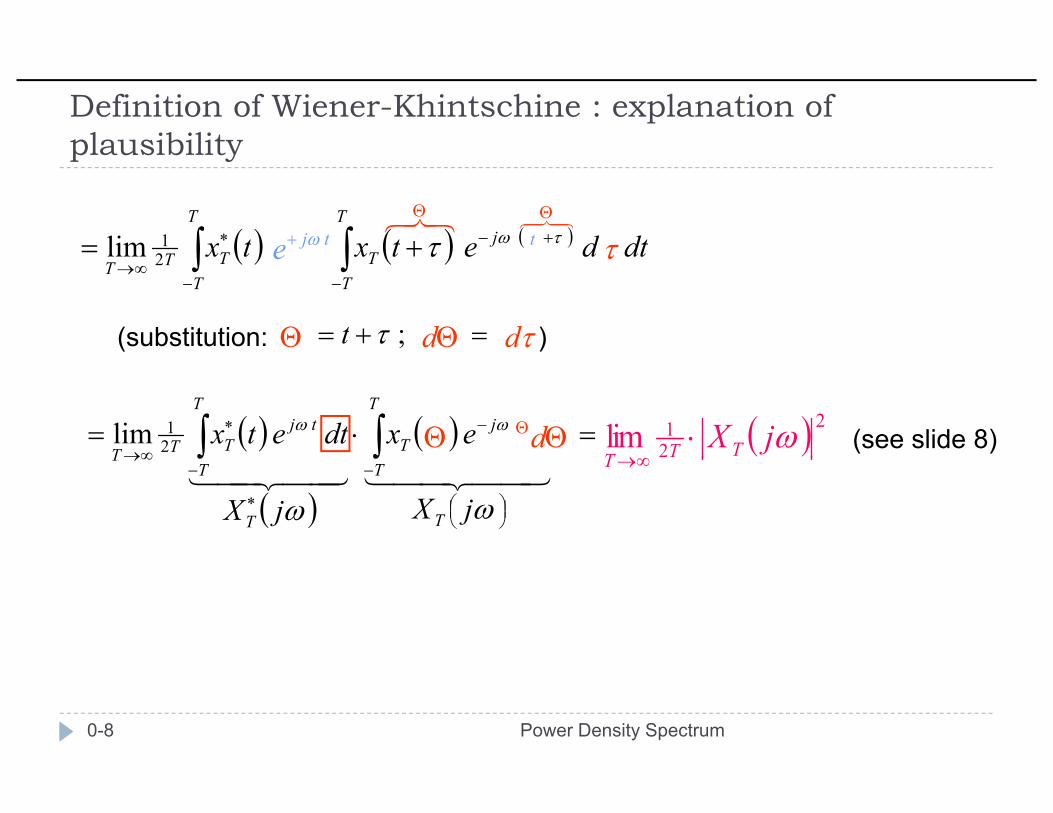
Definition of Wiener-Khintschine : explanation of plausibilityplausibility
( ) ( ) ( ) dtdetxtx jT T
TTτωτ +−∗∫ ∫ += 1lim ttje ω+ τ48476876 ΘΘ
( ) ( ) dtdetxtxT T
TTTTτ
− −∞→ ∫ ∫ +2lim e τ
(substitution: )=+= ;τt τddΘΘ
(see slide 8)( ) 221lim ωjXTTT⋅
∞→( ) ( ) =⋅= −∗
∞→ ∫∫ ωω exdtetx jT
Ttj
T
TTT 21lim ΘΘ Θd
T ∞→
( ) ⎟⎠⎞⎜
⎝⎛
−
∗
−∞→ ∫∫
44 344 214434421ωω jXjX T
T
T
TT
Power Density Spectrum0-8

Response of a linear system to a random input signalResponse of a linear system to a random input signal
impulse response: ( )( )⎩
⎨⎧
tYtX
th:signal output random
:signal input random)(
(Energy-) ACF : ( ) ( ) ( ) ( ) ( )ττττ −∗=+= ∗∞
∞−
∗∫ hhdtththr Ehh
ACF of the output:
CCF f i / t t
( ) ( ) ( ) ( )∗=∗= ττττ XXEhhXXYY rrrr ( ) ( )ττ −∗ ∗hh
( ) ( ) ( )hCCF of in- / output: ( ) ( )∗= ττ XXXY rr ( )τh
PDS of output process: ( ) ( )= ωω jSjS ( ) 2ωjH no phase information!PDS of output process:
Cross-power density spectrum:(between input and output)
( ) ( ) ⋅= ωω jSjS XXYY ( )ωjH
( ) ( ) ⋅= ωω jSjS XXXY ( )ωjH
no phase information!
Response of a Linear System0-9
( p p )
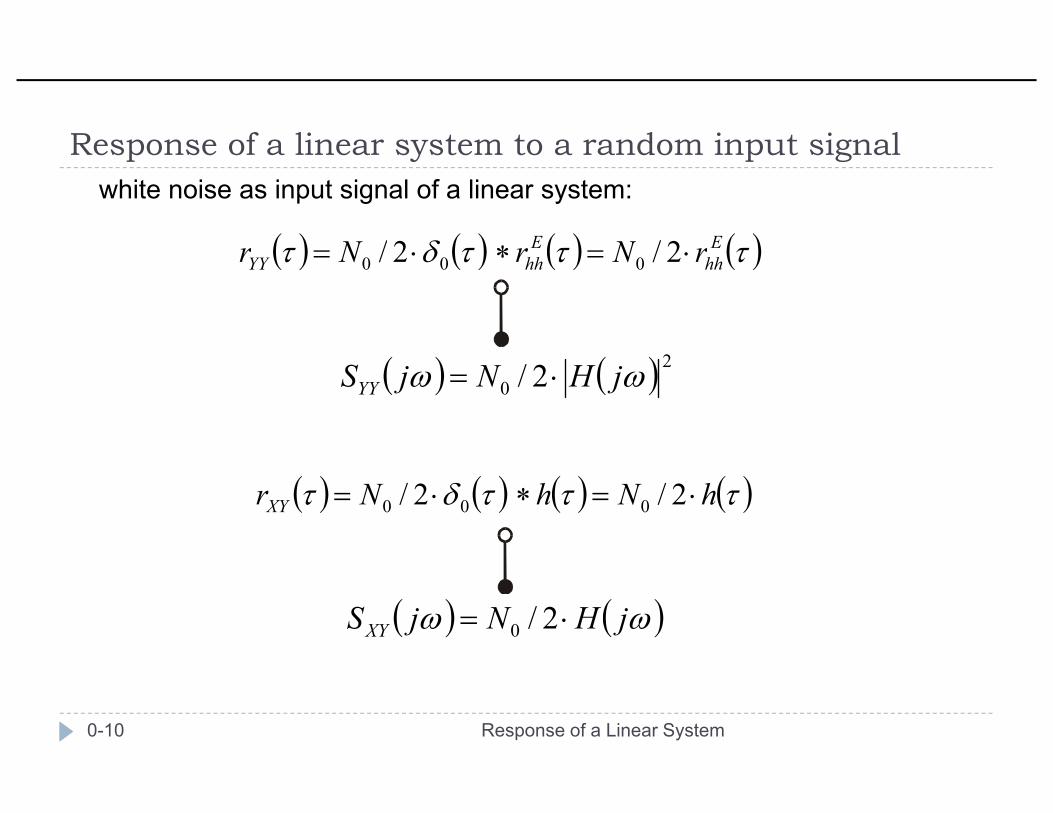
Response of a linear system to a random input signalResponse of a linear system to a random input signalwhite noise as input signal of a linear system:
( ) ( ) ( ) ( )τττδτ EE rNrNr ⋅=∗⋅= 2/2/( ) ( ) ( ) ( )τττδτ hhhhYY rNrNr ⋅=∗⋅= 2/2/ 000
2( ) ( ) 20 2/ ωω jHNjSYY ⋅=
( ) ( ) ( ) ( )τττδτ hNhNrXY ⋅=∗⋅= 2/2/ 000
( ) ( )ωω jHNjSXY ⋅= 2/0
Response of a Linear System0-10














![Integrating the Healthcare Enterprise€¦ · Document Source Document ConsumerOn Entry [ITI Document Registry Document Repository Provide&Register Document Set – b [ITI-41] →](https://static.fdocuments.net/doc/165x107/5f08a1eb7e708231d422f7c5/integrating-the-healthcare-enterprise-document-source-document-consumeron-entry.jpg)