02 - Strukturni Blok Dijagrami Sistema Automatskog Upravljanja
7
1 4. STRUKTURNI BLOK DIJAGRAMI SISTEMA AUTOMATSKOG UPRAVQAWA Jedan oblik matemati~kog modela sistema predstavqa strukturni blok dijagram na kome su pokazane glavne promjenqive sistema, veze izme|u tih promjenqivih i funkcije prenosa komponenti sistema. Elemenat se predstavqa jednim blokom (funkcija prenosa). Me|usobne interakcije se prikazuju linijama. Elemente koji formiraju razliku ili sumu dvije ili vi{e promjenqivih predstavqaju kru`nice. + G 1 G 2 u y Koriste}i osnovna pravila algebre funkcija prenosa, slo`ena po~etna struktura mo`e se svesti na strukturu prikladnu za konkretnu upotrebu. Tabela 4.1 Osnovna pravila algebre funkcija prenosa Pravilo Po~etni dijagram Ekvivalentni dijagram Jedna~ina Serijska veza y=G 1 G 2 u Paralelna veza u G G y ) ( 2 1 ± = Pomjerawe ta~ke granawa ispred bloka y=Gu Pomjerawe ta~ke granawa iza bloka y=Gu G 1 G 2 u y G 1 G 2 u y ± + 2 1 G G ± u y G u y y G u y u G u y u G 1 G u y y G y G(s) u U(s) Y(s) Y(s)=G(s)U(s) z(t)=u(t)=y(t) y z u ± z u y z ) ( ) ( ) (t u t y t = ± Sl.4.1
-
Upload
lee-van-cleef -
Category
Documents
-
view
700 -
download
12
description
SAU
Transcript of 02 - Strukturni Blok Dijagrami Sistema Automatskog Upravljanja

1
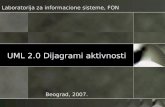
4. STRUKTURNI BLOK DIJAGRAMI SISTEMA AUTOMATSKOG UPRAVQAWA Jedan oblik matemati~kog modela sistema predstavqa strukturni blok dijagram na kome su pokazane glavne promjenqive sistema, veze izme|u tih promjenqivih i funkcije prenosa komponenti sistema. Elemenat se predstavqa jednim blokom (funkcija prenosa). Me|usobne interakcije se prikazuju linijama. Elemente koji formiraju razliku ili sumu dvije ili vi{e promjenqivih predstavqaju kru`nice.
+
G1 G2u y
Koriste}i osnovna pravila algebre funkcija prenosa, slo`ena po~etna struktura mo`e se svesti na strukturu prikladnu za konkretnu upotrebu. Tabela 4.1 Osnovna pravila algebre funkcija prenosa Pravilo Po~etni dijagram Ekvivalentni
dijagram Jedna~ina
Serijska veza
y=G1G2 u
Paralelna veza
uGGy )( 21 ±=
Pomjerawe ta~ke granawa ispred bloka
y=Gu
Pomjerawe ta~ke granawa iza bloka
y=Gu
G1G2u y
G1
G2u y ±
+21G G±u y
G u y y
G u y u
Gu yu
G1
Gu y y G
y G(s)
u
U(s) Y(s)
Y(s)=G(s)U(s) z(t)=u(t)=y(t) y
z u
±
z u
y z )()()(t u t y t= ±
Sl.4.1

2
Pomjerawe sumatora iza bloka
)( zuGy ±=
Pomjerawe sumatora ispred bloka
zGuy ±=
Transformacija povratne sprege
uGH
Gy±
=1
Pomjerawe ta~ke granawa ispred sumatora
zuy ±=
Pomjerawe ta~ke granawa iza sumatora
zuy ±=
Komutacija signala
21 zzuy ±±=
G u y
z
+ ±
Gu y +±
z G
G u y
z
+±
G1
Gu y +
±z
Gu y + m
H GHG±1
u y
y u
z
+ ± y
u y
z
+±u
u y +
z ±y + ±
u y +u
z ±
m
+
y u
z2
+±±
+
z1
y u
z2
++±±z1
y u +
z2±
±+
z1

3
U sqede}im primjerima, koriste}i osnovne transformacije blok dijagrama, odrediti funkcije prenosa od ulaza R(s) do izlaza Y(s) za date sisteme. Primjer 4.1
Rje{ewe: Za sistem sa povratnom spregom dat blok dijagramom na Sl.4.3, na osnovu definicije funkcije prenosa vrijede relacije
Y(s) = W(s) E(s) Y1(s) = H(s) Y(s) Tako|e je signal gre{ke: E(s) = R(s) - Y1(s) Kombinuju}i zadwe jedna~ine dobija se:
R(s)W(s)H(s)+1
1=E(s)
R(s)W(s)H(s)+1W(s)=Y(s)
gdje je W(s)H(s) - funkcija povratnog prenosa sistema. Napomena: U slu~aju da se radi o sistemu sa pozitivnom povratnom spregom, {to bi bilo ozna~eno sa znakom "+" umjesto "-" na Sl.4.3, dobija se:
E(s)= 11-W(s)H(s)
R(s)
Y(s)= W(s)1-W(s)H(s)
R(s)
U1(s) Y(s) (s)W1
(s)H 1
R(s) E(s)(s)W2
(s)H 2
H (s)3
Sl. 4.2
Y(s) R(s) E(s)
Y1(s)
W(s)
H(s)
Sl.4.3

4
Dakle funkcija prenosa sistema (Sl. 4.3) u zatvorenoj sprezi je:
W(s)H(s)+1W(s)=
R(s)Y(s)=(s)W Z
a funkcija prenosa u odnosu na gre{ku E(s) je:
.W(s)H(s)+1
1=R(s)E(s)=(s)W E
Koriste}i gore izvedene relacije po~etni blok dijagram (Sl.4.2) se mo`e pojednostavniti kao na Sl.4.4.
Y(s) R(s) W sW s H s
1
1 11( )
( ) ( )+
E(s) W sW s H s
2
2 21( )
( ) ( )+
H (s)3
Sl.4.4
. Funkcija prenosa sistema kojeg ~ine vi{e kaskadno (serijski) vezanih elemenata jednaka je proizvodu funkcija prenosa pojedinih komponenti pa se dobija ekv. blok dijagram kao na Sl.4.5.
W WW H W H
1 2
1 1 2 21 1( )( )− +R(s) Y(s) E(s)
H3
Sl.4.5
Na kraju, koriste}i naprijed izvedeno za funkciju prenosa sistema u zatvorenoj sprezi dobijamo:
.(s)H(s)W(s)W+(s))H(s)W+(s))(1H(s)W-(1
(s)W(s)WR(s)Y(s)=(s)W
3212211
21Z =

5
Primjer 4.2
Rje{ewe:
Na~in pojednostavqivawa blok dijagrama nije jednozna~an. Transformacije blok dijagrama sistema na Sl.4.6 su prikazane postupno, pa nije neophodno komentarisati svaki korak posebno.
R(s) W (s)1 W (s)2
H (s)2
W (s)3
Y(s)
H (s)1
W (s)4
Sl 4 6
Y(s)R(s) W (s)1 W (s)2
W (s)4
W (s)3
Sl 4 7
H (s)2
H (s)1
H (s)1
Y(s)R(s) W (s)1
W (s)4
W (s)3
Sl.4.8
H2(s)
H1(s)
)()()(
sHsWsW
12
21+

6
Y(s)R(s) W (s)1
W (s)4
W (s)3
Sl.4.9
H (s)2
)()()(
sHsWsW
12
21+
H1(s)/W3(s)
Y(s)R(s) W (s)1
W (s)4
Sl.4.10
H2(s)
)()()()(sHsW
sWsW
12
321+
H1(s)/W3(s)
Y(s)R(s) W (s)1
W (s)4
Sl.4.11
)()()()()(
)()()()(
sHsWsHsWsW
sHsWsWsW
12
23212
32
11
1
++
+
H1(s)/W3(s)

7
Y(s)R(s)
W (s)4
Sl.4.12
H1(s)/W3(s)
)()()()()()()()(
sHsWsWsHsWsWsWsW
23212
3211 ++
W W W
W W H W H W W H1 2 3
1 2 1 2 1 2 3 21− + +
W4
Y(s) R(s)
Sl.4.13
Z 41 2 3
1 2 1 2 1 2 3 2W (s) = Y(s)
R(s)= W (s W (s)W (s)W (s)
1 -W (s)W (s) H (s)+W (s) H (s)+W (s)W (s) H (s)) +