メカトロニクスsagawa/2011/class/...(mechatronics) (mechanics) (electronics) 和製英語...
45
メカトロニクス 知能機械工学科 3年生火曜日3・4時限 第8講義室 2011年10月4日(火)
-
Upload
truonghanh -
Category
Documents
-
view
214 -
download
2
Transcript of メカトロニクスsagawa/2011/class/...(mechatronics) (mechanics) (electronics) 和製英語...

メカトロニクス
知能機械工学科
3年生火曜日3・4時限
第8講義室
2011年10月4日(火)

教科書・参考書
• 教科書「メカトロニクス入門」第2版土谷武士/深谷健一共著森北出版(株)¥2,800
• 参考書(例)「ハンディブックメカトロニクス」三浦宏文監修オーム社出版局¥3,800
• ホームページhttp://www.mech.hirosaki-u.ac.jp/~sagawa/
2011/class/class2011.html

授業の概要
メカトロニクスを構成する要素であるハードウェア(センサ、アクチュエータ、パワーエレクトロニクス、マイクロコンピュータ)と、ソフトウェア(ハードウェアの制御法、データ処理、制御系設計)について、各要素の役割、原理、利用方法、応用例を学習します。

達成目標
1. 運動計測用センサの原理を説明することができる。
2. アクチュエータの動作原理を説明することができる。
3. パワー回路の原理を説明することができる。
4. 運動変換機構の原理を説明することができる。
5. マイクロコンピュータの機能を説明することができる。
知能機械システム工学プログラム教育目標(B) 工学基礎と専門知識の習得(E) 複合領域の理解と知的探求心の養成
に対応

授業の内容予定
第1回 メカトロニクスの概要について学習します。第2回 電子回路の受動素子(抵抗、コンデンサ、コイル、その他)について学習します。第3回 電子回路の半導体素子(ダイオード、トランジスタ、その他)について学習します。第4回 オペアンプによるフィルタ回路の原理について学習します。第5回 メカトロニクスの動作を測定するためのセンサについて学習します。第6回 メカトロニクスを動作させるアクチュエータの原理、駆動方法について学習します。第7回 DCサーボモータの原理、特性、駆動方法について学習します。第8回 ステッピングモータの動作原理と駆動方法について学習します。第9回 メカトロニクスの動作の線形変換機構について学習します。第10回 機構の数学モデル構築と動作解析について学習します。第11回 マイクロコンピュータの原理と構成について学習します。第12回 マイクロコンピュータの入出力インターフェースの制御方法について学習します。第13回 メカトロニクスを希望通りに動かすための制御則(PID制御等)について学習します。第14回 メカトロニクスシステムの実例について学習します。第15回 期末試験を行います。第16回 期末試験の答案返却と解説を行います。

第1章 メカトロニクス序論
1.1 メカトロニクスとは
メカトロニクス = メカニクス + エレクトロニクス
(mechatronics) (mechanics) (electronics)和製英語
(例) ロボット、工作機械、プリンタ、
マイコン内蔵家電製品など
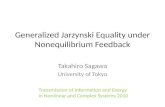
メカトロニクスシステムの基本構成
作業命令 判断 動作
人間別のシステムセンサなど
電子回路マイコンプログラム
機械アクチュエータ(モータなど)

メカトロニクスの定義
「与えられた目的を果たすシステムを設計・生産・稼働・保守するために、機械と電子と情報に関する技術や工学を融合し、総合的に適用する技術あるいは工学」

1.2 メカトロニクス出現の背景
• 4bitマイクロプロセッサ(1971)• 小型高トルクモータ
希土類永久磁石
• デジタル制御理論

手回し計算機(国立科学博物館所蔵)
マイクロプロセッサ以前

マイクロプロセッサ以前
真空管式の計算機

世界初のマイクロプロセッサ
インテルi4004

小型高トルクモータ
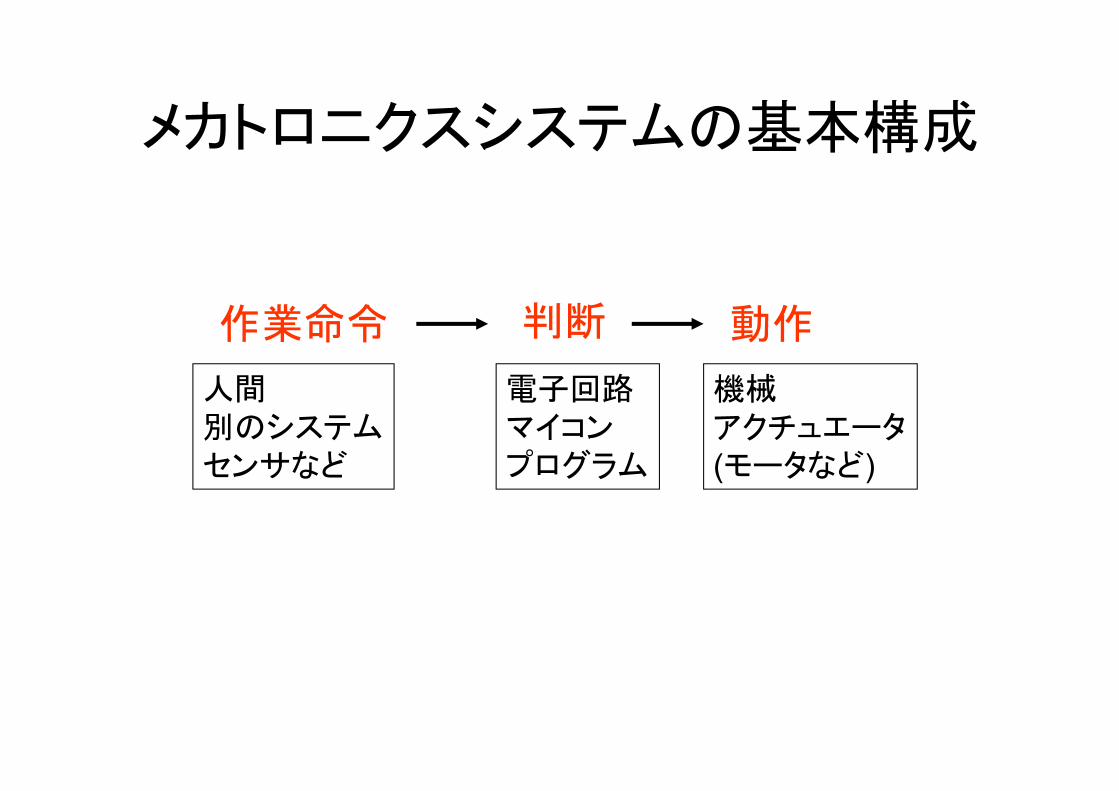
デジタル制御
離散化 量子化
伝達関数
Z変換

1.3 メカトロニクスの効用
1. 柔軟性の向上マイクロプロセッサソフトウェア
2. 非接触化・静止機器化と高信頼化(摩擦、振動)ブラシモータ→ブラシレスモータ
3. 小型軽量化と高信頼化バラバラのパーツ→IC→部品数の減少
4. 高精度化・高速化機構依存型→ソフトウェアサーボ

1.4 メカトロニクスの構成要素
目標値
コントローラ(コンピュータ)
駆動装置(ドライバ、アンプ)
アクチュエータ(モータetc)
機構(制御対象、
歯車、リンク)
センサ
パワー源
+
ー
目標値
コントローラ(コンピュータ)
駆動装置(ドライバ、アンプ)
アクチュエータ
(ステッピングモータetc)
機構(制御対象、
歯車、リンク)
パワー源
閉ループ or closed loop or フィードバック制御系
開ループ or open loop制御系

利点、欠点
• Closed loop系
– 精度高い、外乱に強い
– 動きの速さ遅い
• Open loop系
– 精度低い、外乱に弱い
– 動きの速さ早い
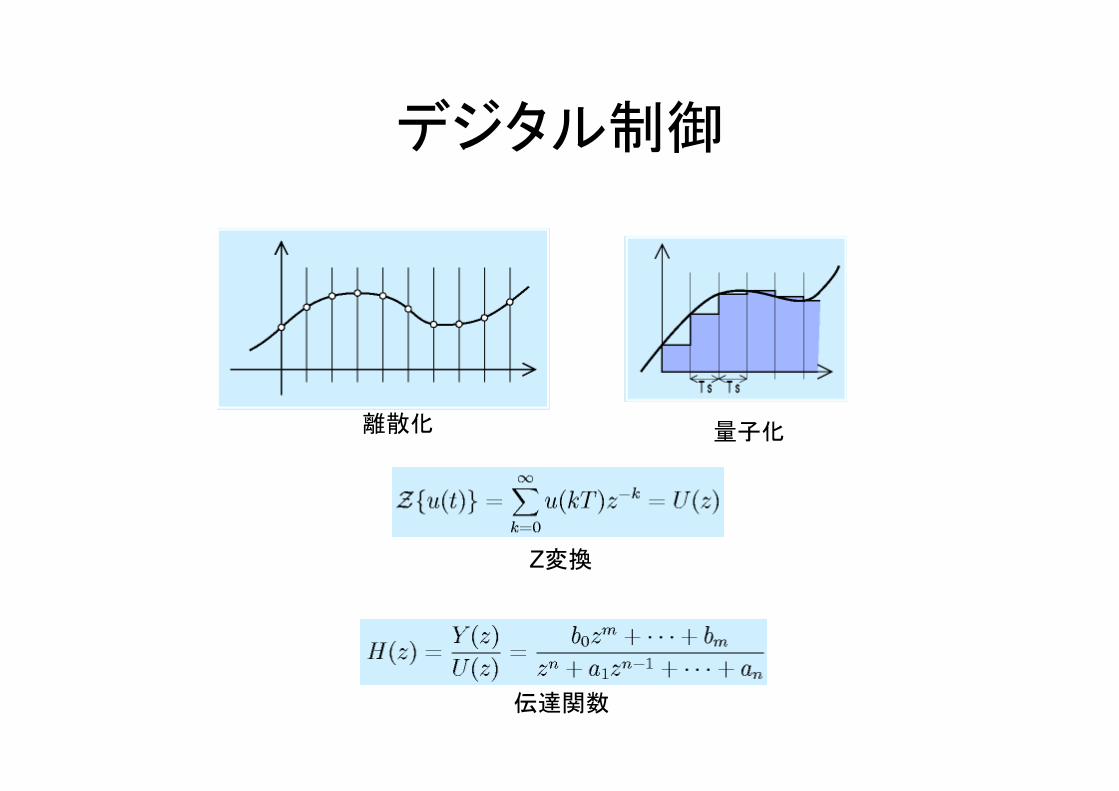
シーケンス(sequence)制御系
作業命令
命令処理部
制御命令操
作部
操作信号
制御対象
状態変化検
出部
検出信号
命令処理部
制御命令操
作部
操作信号
制御対象
状態変化検
出部
検出信号
スタート命令
スイッチ
リレー
電熱器
温度センサ
第1段階 第2段階

構成要素例
• 機構:リンク、歯車、チェーン、ボールねじ、カム
• アクチュエータとその駆動装置:モータ、油圧or空気圧アクチュエータ電力、油圧、空気圧(コンプレッサ)
• センサ:変位、速度、加速度、力、角度、角速度、距離、気圧
• コントローラ:コンピュータ、AD変換器、DA変換器プログラム言語(機械語、アセンブラ、C言語など)

リンク機構

ボールねじ

カム

油圧、空気圧
パスカルの原理
油圧システム
空気圧アクチュエータ

センサ
航空機用ジャイロ
3軸加速度センサ
ロータリエンコーダ
ひずみゲージ

メカトロニクスシステムの例(すばる望遠鏡)
アクチュエータ(264本使用)凹面鏡の傾斜誤差を100[nm]以下に抑制できる

ハンズフリーロボット制御
手を使わず、ロボットを自分で制御
Introduction
Background Hands-free control of robot will be required for
Welfare work, housework, effective manufacturing…
Solution Using biomedical signals
EMG (Electromyogram)
Purpose Simple and easy hands-free control of robot
manipulator using facial muscles

Methods-Using EMG to control robot manipulator
Facial muscle used in this study Masseter
A thick muscle in the cheek that closes the jaw during chewing
Advantages Two muscles (left and right)
Enable bidirectional control. Can be controlled voluntarily
and separately
No effect on hand movement realizes to have the third hand.
咬筋肉
(You will have one of them.)

Methods-Electromyogram: EMG
EMG Generated by contraction of muscle Voltage: V – mV Frequency: 10-5000[Hz]
Measurement Use of electrode Polygraph (NEC, Type365) Sampling frequency: 1000[Hz] Amplification: x5000
0 2 4 6-3
-2
-1
0
1
2
3
time [sec]
Polygraph
Raw EMG signal
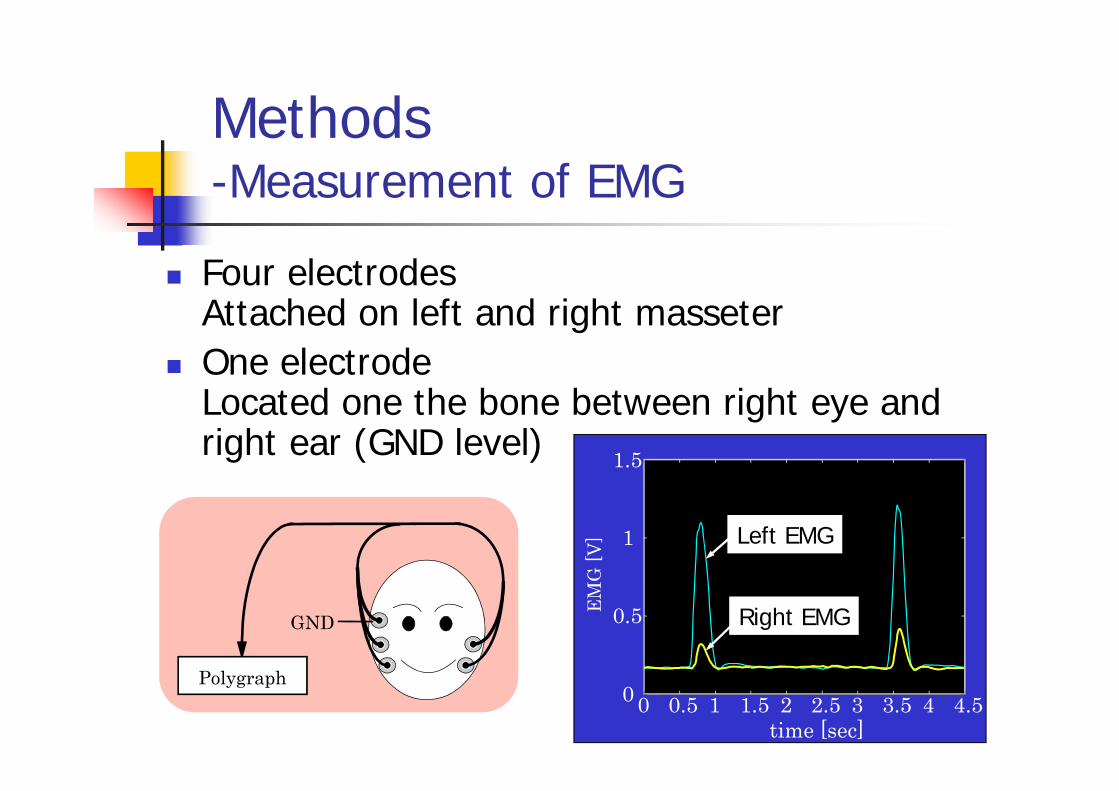
Methods-Measurement of EMG
Polygraph
GND
Four electrodesAttached on left and right masseter
One electrodeLocated one the bone between right eye and right ear (GND level)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.5
1
1.5
time [sec]
left
right
Left EMG
Right EMG

Methods-Control strategy
Position of end effector Velocity control
v = K(VL-VR)(VL, VR: Absolute values of EMG from left and right masseter)
Open/close control of end effector Detection of double clench action Calculation of correlation coefficient R between
both VL and VR and reference waveform R>0.7 Open/close

Methods-Robot manipulator
Has parallel link mechanism with 3DOF Equips one end effector remodeled from RC
servo motor Is controlled parallel to y-axis.
End effectorx
y
z

Experiment-Block diagram
Block diagram of control system
MasseterEMG
(Right)
MasseterEMG(Left)
LPFfcut = 3 [Hz]
LPFfcut = 1 [Hz] constant K
R of EMG and Reference waveform
Referencewaveform
+
-+
+
RobotManipulator
End EffectorOpen / Close
1
-
s+
-
(R: Correlation coefficient)
If R>0.7 during past 0.5 [s]

Experiment-Control system
y
Computer ADDA Polygraph
MotorDriver
Servo Motor
Potentiometer
Robot manipulator
End effectorObject
Operator
EMG
Angle
Overview of experimental apparatus
Experiment-Given task
The operator1. Opens the end effector2. Moves the manipulator to the table and picks
up the object.3. Moves the manipulator to the original position
with the object4. Returns the object on the table5. Moves the manipulator and closes the end
effector

Results-Demonstration
救急車用アクティブベッド
患者を安全に運ぶためには?

これまでの救急車
貨物用車両を改造
最高時速80[km/h] 赤信号でも進める
時には急ブレーキもある
実は、乗り心地悪い!!!救急車で搬送されると病状悪化!!!

加速度と血圧の関係調査(急ブレーキ実験)
SUGOサーキットバックストレート車内の様子
血圧測定部

加速度吸収ベッド(アクティブ制御ベッド)の開発・制御法
0
tan 1
gz
d
2sincos zgZZB
0ZB
頭足方向加速度
傾斜角の目標値アクティブベッドのモデル
頭部加速度
(減速時)
(加速時)

ブロック図
加速度センサコンピュータ(角度に変換)
+-
コンピュータ(角度の差がなくなるように命令を発信)
エンコーダ(角度を計測する)
モータ
アクティブベッド
モータドライバ
バッテリ
カウンタ(エンコーダからのパルス数を角度に変換)
dz
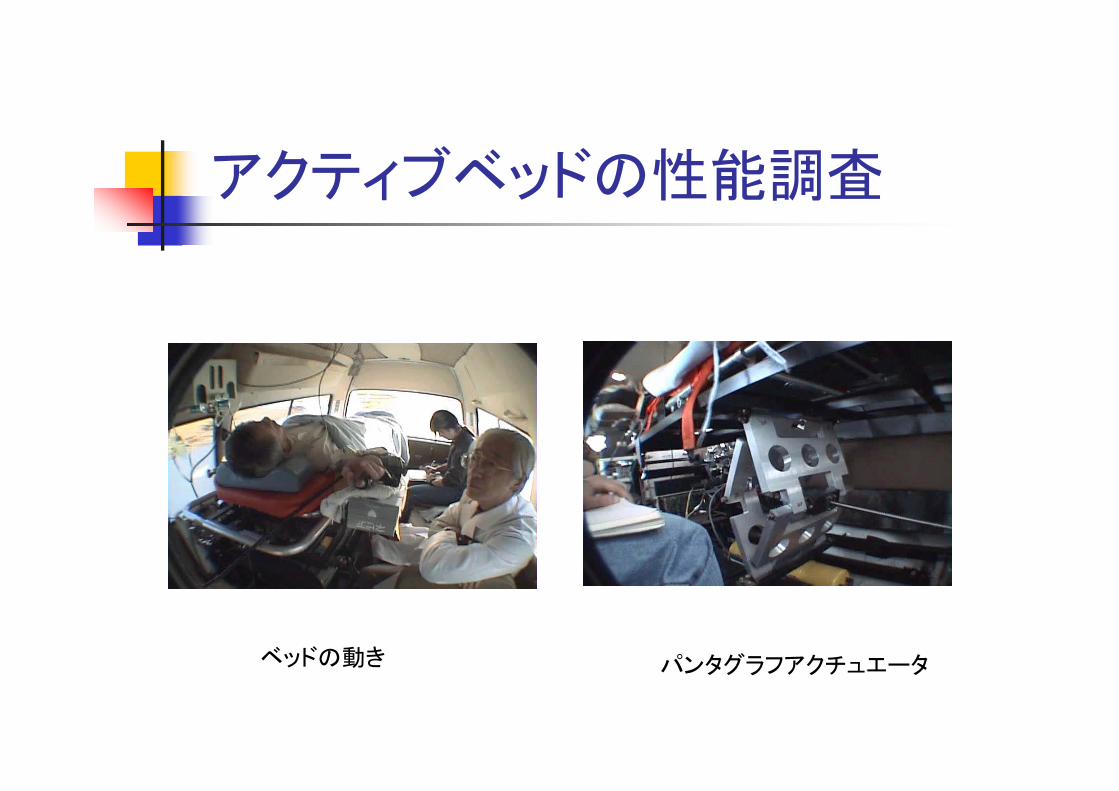
パンタグラフアクチュエータベッドの動き
アクティブベッドの性能調査

東京モーターショー2004にて

宿題
1. 閉ループ系と開ループ系の制御方式が利用されている身の回りの品物をそれぞれ1つ取り上げ、以下の問題に答えよ(エアコンは除く)
【例:エアコンの場合(閉ループ制御系)】 使用しているセンサは? 温度センサ,湿度センサ アクチュエータは? コンプレッサ,ファンのモータ どうやって制御しているのか?
例: 使用者が設定した温度と室温を比較し、室温が低ければヒータとファンのスイッチをONにして温風を送り出す。室温が高い場合はコンプレッサを作動させ冷気を送り出す。室温が設定温度に達したら、ファンと、ヒータまたはコンプレッサのスイッチをOFFにする。

宿題(つづき)
2. 手で卵をつかんで別のところに割れないように置くという動作について考える。教科書7ページの図1.4の各要素が,人間のどのような機能に対応しているのか具体的に説明えよ。制御対象は「卵」とする。
3. 教科書8ページ演習問題(全部)
〆切
2011年10月11日(火)授業開始時


















