Ý § Æ Ü × ç ; M h é Ø ¿ Ä w é » æ ¤ ï ¯ ¼ t Ñ Å Ì ¿ «M …...Ý Æ Ü × ç ;...
2
ϝΧφϜϗΠʔϧΛ༻ҠಈϩϘοτͷϩʔλϦΤϯίʔμʹΑΔ ϑΟʔυόοΫ ޚFeedback Compensation of the Mobile Robot with Mecanum Wheel Using Rotary Encoder ʓ ౻ࠤ 1 ɼদ ๕ 2 ɼ ߂و2 * Minoru Sato 1 , Yoshio Hamamatsu 2 , Takahiro Hoshino 2 Abstract:Automation factory gives various advantage. Automatic conveyance system is one of the automation of factory. Automatic conveyance system is a system that convey goods by autonomous mobile robot. We develop an autonomous mobile robot to verify the automatic conveyance system. This autonomous mobile robot equips with an optical sensor and ultrasonic sensor. This robot has a line trace function and obstacle avoidance function. It is difficult for this robot to run straight when avoiding obstacle, because the rotational speed of each wheel differs. Therefore, we control this robot by feedback compensation. This robot equips with rotary encoder for feedback compensation. Rotary encoder is a converter that converts rotational angular displacement of rotary shaft to digital value. We discuss efficiency of feedback compensation to this robot by using a rotary encoder. 1. Ίʹ ຊڀݚͰରͱΔͷۀ༻ϩϘοτͷҰͰΔ ແਓൖૹʢAutomated Guided Vehicle: AGVʣͰ ΔɽAGV ͷར༻ɼॏՙͷӡൖͳͲͷਓʹ ۀ࡞ΛΔͱͰΔͳͲɼ໘ͰظΕ ΔɽɼোΛݕ߹ɼऔΓআΕΔ· ͰࢭΔΊۀ࡞ͷԼΛটՄΔɽ ͷʹରোճආͷػΛ AGV ͷجత ͳڀݚΛߦ [1] ɼϩϘοτΛసճආ ΔͱʹΔ߹ɽ ͷʹରຊڀݚͰɼোճආʹટճಈ ࡞ΛඞཁͱͳܕҠಈϩϘοτͷ࡞Λతͱɽ ͷΊɼશҐλΠϠͰΔϝΧφϜϗΠʔϧΛ༻ ɼίʔεͰͷϥΠϯτϨʔεͱোճආͷΞϧΰ ϦζϜΛ౼ݕɽ ϝΧφϜϗΠʔϧΛ༻ΔͱͰཧɼટճಈ࡞ ΔͱͳͲͷʹҠಈՄͰΔɽɼ ݱࡏ࡞ϩϘοτͰϓϩάϥϜͷࢦͱࡍͷճ సҰகͳΊɼඪʹରΕ ੜΔɽͷͱʹΑΓɼҠಈڑͳΔଞʹɼ োʹ·ͱΔΊվળͷඞཁ ΔɽݪҼͱɼϓϩάϥϜʹѹΛೖ ճసΛఆΔͱߟΒΕΔɽͰɼϩʔ λϦΤϯίʔμΛ༻ϞʔλͷճసΛݕग़ɼ ඪͱͷภΛٻΊΔͱͰϑΟʔυόοΫޚΛߦɽ 2. ܕҠಈϩϘοτ ຊڀݚͰ։ϩϘοτͷ֎؍Λ Fig.1 ʹɽϩ ϘοτΛޚΔϚΠίϯ Arduino MEGA 2560 Λ ༻Δɽ ϗΠʔϧʹશҐλΠϠͰΔϝΧφϜϗΠʔϧΛ 1:େཧɾӃɾ ؾ2:େཧɾڭһɾ ؾ࠾༻ΔɽϝΧφϜϗΠʔϧখͳϩʔϥʔ ʹର 45 ঢ়ଶͰɼϗΠʔϧͷද໘ΛғΉ ΑʹฒΜߏΛΔΊɼϗΠʔϧճస ʹࡍੜΔۦಈΊʹ 45 ɽϗΠʔϧͰ ੜΔۦಈͷΛΈ߹ΘΔͱͰॴͷ ʹɼϩϘοτͷΛมΔͱͳҠಈΔͱͰ Δɽ ϩϘοτલԼ໘ʹηϯαΛઃஔΔɽ ֎ͱͷͷΛར༻ɼൖૹϥΠϯͷ ࠇͱͷ΄ͷচ໘ͷ৭ΛผϥΠϯτϨʔεΛߦɽ োΛݕΔηϯαʹɼԻηϯαΛ࠾༻ ΔɽԻΛૹ৴Βɼମʹ ԻΛड৴Δ·ͰͷʹΑΓɼର·Ͱͷڑ ΛٻΊΔͱͰΔɽຊڀݚͰ࡞ϩϘοτɼશ ҐλΠϠͷϝΧφϜϗΠʔϧΛ༻ΔΊɼϩ ϘοτͲͷʹҠಈোΛݕͰΔΑ ʹɼԻηϯα Fig.1 ͷΑʹ߹ ܭ6 ݸΛஔɽ Fig. 1: Deveroped the mobile robot. 平成 29 年度 日本大学理工学部 学術講演会予稿集 949 L-28
Transcript of Ý § Æ Ü × ç ; M h é Ø ¿ Ä w é » æ ¤ ï ¯ ¼ t Ñ Å Ì ¿ «M …...Ý Æ Ü × ç ;...

メカナムホイールを用いた移動ロボットのロータリエンコーダによるフィードバック制御
Feedback Compensation of the Mobile Robot with Mecanum Wheel Using Rotary Encoder
〇佐藤 稔 1 ,浜松 芳夫 2 ,星野 貴弘 2
∗Minoru Sato1, Yoshio Hamamatsu2, Takahiro Hoshino2
Abstract:Automation factory gives various advantage. Automatic conveyance system is one of the automation of
factory. Automatic conveyance system is a system that convey goods by autonomous mobile robot. We develop
an autonomous mobile robot to verify the automatic conveyance system. This autonomous mobile robot equips
with an optical sensor and ultrasonic sensor. This robot has a line trace function and obstacle avoidance function.
It is difficult for this robot to run straight when avoiding obstacle, because the rotational speed of each wheel
differs. Therefore, we control this robot by feedback compensation. This robot equips with rotary encoder for
feedback compensation. Rotary encoder is a converter that converts rotational angular displacement of rotary
shaft to digital value. We discuss efficiency of feedback compensation to this robot by using a rotary encoder.
1. はじめに本研究で対象とするのは産業用ロボットの一つである
無人搬送車(Automated Guided Vehicle: AGV)であ
る.AGVの利用は,重い荷物の運搬などの人間には難
しい作業をすることができるなど,効率面で期待されて
いる.しかし,障害物を検知した場合,取り除かれるま
で停止するため作業効率の低下を招く可能性がある.こ
の問題に対して障害物回避の機能をもつ AGVの基礎的
な研究を行ってきたが [1],ロボットを方向転換して回避
するときに長い時間がかかる場合があった.
この問題に対して本研究では,障害物回避に旋回動作
を必要としない自律型移動ロボットの製作を目的とした.
そのため,全方位タイヤであるメカナムホイールを使用
し,コース上でのライントレースと障害物回避のアルゴ
リズムを検討した.
メカナムホイールを用いることで理論上,旋回動作す
ることなくどの方向にも移動が可能である.しかし,現
在制作したロボットではプログラムの指令値と実際の回
転速度が一致していないため,目標方向に対してずれが
生じている.このことにより,移動距離が長くなる他に,
障害物に近づいてしまうことがあるため改善の必要があ
る.原因としては,プログラムに電圧値を直接入力して
回転速度を決定していることが考えられる.そこで,ロー
タリエンコーダを用いてモータの回転速度を検出し,目
標値との偏差を求めることでフィードバック制御を行う.
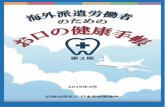
2. 自律型移動ロボット本研究で開発したロボットの外観を Fig.1に示す.ロ
ボットを制御するマイコンはArduino MEGA 2560を使
用している.
ホイールには全方位タイヤであるメカナムホイールを
1:日大理工・院・電気 2:日大理工・教員・電気
採用している.メカナムホイールは小さなローラーが車
軸に対して 45度傾いた状態で,ホイールの表面を囲む
ように並んだ構造をしているため,ホイールが回転した
際に発生する駆動力は斜めに 45度傾く.各ホイールで
発生する駆動力の方向を組み合わせることで所望の方向
に,ロボットの向きを変えることなく移動することがで
きる.
ロボット前方下面に光センサを設置している.投射し
た赤外光と反射光の光量の差を利用し,搬送ラインの黒
とそのほかの床面の色を識別してライントレースを行う.
障害物を検知するセンサには,超音波センサを採用し
ている.超音波を送信してから,物体に当たって反射し
た音波を受信するまでの時間差により,対象までの距離
を求めることができる.本研究で製作したロボットは,全
方位タイヤのメカナムホイールを使用しているため,ロ
ボットがどの方向に移動しても障害物を検知できるよう
に,超音波センサは Fig.1のように合計 6個を配置した.
Fig. 1: Deveroped the mobile robot.
平成 29 年度 日本大学理工学部 学術講演会予稿集
949
L-28

3. フィードバック制御本研究で対象とする制御系のブロック線図を Fig.2に
示す.まず,走行速度に対応した電圧を算出し,Arduino
に電圧の値を入力する.その電圧がモータに加わり回転
するが,モータごとに回転数のずれが生じる.モータの
回転速度を検出し,Arduinoにフィードバックする.その
値により,所望の回転速度になるように電圧を調節する.
Rotary encoder
MotorArduino�
�
Fig. 2: Block diagram of controlled object.
4. ロータリエンコーダロータリエンコーダは,回転軸の回転角変位をディジ
タル量に変換する変換器である [2].軸に直結し,等間隔
に隙間がある回転盤と,これを挟んだ発光ダイオードと
フォト・トランジスタにより構成されている.発光ダイ
オードから出た光線が回転盤を介してフォト・トランジ
スタに入力され,ディジタル信号に変換される.
ロータリエンコーダを用いて回転速度を検出する場合,
回転速度を r,出力されるパルスの周期を T,モータが
1回転するまでに出力されるパルスの数をN とすると,
r = (NT )−1 (1)
で表される.N は使用しているモータで決まった値と
なっているため,T を求めることによりそのときのモー
タの回転速度を算出することができる.
5. 結果フィードバック制御を行わない状態での直進動作で,
どれだけのずれが生じるかを確認する動作実験を行った.
測定方法を Fig.3に示す.すべてのモータに等しい電圧
をかけ,t[s]直進したときの目標位置に対するずれ x[cm]
とロボットの初期姿勢からの傾き θ[ ° ]を測定した.走
行時間 tは 3~5[s]で 0.5[s]ごとに測定した.測定結果
のグラフを Fig.4に示す.プロットは実験値,直線は最
小二乗法による近似直線である.Fig.4より,走行時間
tが 1[s]増加すると,ずれ xは約 0.8[cm],角度 θ は約
1[ ° ]増加していることがわかる.このことから,ロボッ
トの走行中は常に 4つのモータの回転速度が一致してい
ないことがわかる.走行距離が長くなるほどずれが大き
くなるため,回転速度を一致させ,ずれが生じないよう
にフィードバック制御をする必要がある.所望の回転速
����robot
�����
Target position
Fig. 3: Experiment of straight motion.
3 4 50
2
4
0
2
4
6
8
Running time t [s]
Err
or x
[cm
]
Angle θ [�
]
: Error
: Angle
Fig. 4: Result of experiment.
度を得るためにかかる時間から,PID制御が適している
と考えられる.
6. まとめ動作実験によって,走行距離が長いほど理想のコース
からのずれが大きくなること,4つのモータの回転速度は
常に一致していないことがわかった.今後は,ロータリエ
ンコーダを使用してモータの回転速度を検出し,フィー
ドバック制御するアルゴリズムを検討する.また,ロー
タリエンコーダを使用して動作実験を行い,常に 4つの
モータの回転速度が等しい状態での走行が可能か確認す
る.そして,ロボットに搭載可能かどうか確認する.
参考文献
[1] 安盛,浜松,星野:「複数センサ情報による自律型移動ロボットの障害物回避アルゴリズムの検討」,平成 28年電気学会産業応用部門大会,2-10,pp.2-103-2-106,(2016.8)
[2] 谷腰欣司:「センサーのしくみ」,電波新聞社,pp.85-87(2010)
平成 29 年度 日本大学理工学部 学術講演会予稿集
950


![Y & '¿ k5V 7 - 2 Y f 0b ½...m m m m1P&? F Q æ %$ 7 m m m m1P& ? F Q æ %$ 7 É m] dª5. æ RQ8Ð 8 G f 2 É m)B v y÷æ *1 É m ¡1w $æ æÇ æÇ NN )æÇ%æÇ8 É m^ CÝw 52æ](https://static.fdocuments.net/doc/165x107/5fe271727f473f270f7f47b7/y-k5v-7-2-y-f-0b-m-m-m-m1p-f-q-7-m-m-m-m1p-.jpg)
![ÊÀË §M Z] { Ë ^e Æ É{ Â»Ä ·Z », Æ Y|ËZa](https://static.fdocuments.net/doc/165x107/616a286611a7b741a34f6e16/-m-z-e-.jpg)




![2 Ùd é( æ 0ÌÚ *² ¸é( %¤! Û-€¦ · âÒùÁÚü9Ø c 2é É :Ç -ÐÛÞÚ ùÚ9Ø \Q7é ¸ p æ % ÒÚR-=\ê9Ø " !¢Æ ]æ û 2 !ÒÚãÒáý9Ø Øé ß âR-=\é Ä ê](https://static.fdocuments.net/doc/165x107/602dae405bf3f32f14633c29/2-d-0oe-9-c-2-9.jpg)