{ G G - thaieasyelec.com Manual -1.pdf · ... 32 hole distance : 30mm-“L” type slots for tray...
31
Education Robot 35
Transcript of { G G - thaieasyelec.com Manual -1.pdf · ... 32 hole distance : 30mm-“L” type slots for tray...

Education Robot 35

Education Robot36
Chapter 1 : Getting ready
The CRX10 is an autonomous mobile robot platform for education
in elementary, middle or high schools, training and research.
CRX10 supports MSRDS, SPL (Simple Programming Language), AVR (C languages)
and Android programming languages.
· Clean and modern design
· Microsoft VPL visual programming language support
· Voice recognition, joystick and other various services are represented graphically via VPL
· 9 robot activities or services in VPL
· 2 wheel to 4 wheel transformable structure, for driving stability robot
has double wide wheels
· Robots can roll over bumps. Maximum slop is about 15 degree.
· 3 rubber ring-shaped coverings !t around a wheel rim to protect it
and enable a close contact with the ground. For easy coverings maintenance
there are special “U” type notches on rims.
· Audio source tracking, autonomous obstacle avoidance, line tracing
· 64 LED-based display
· 4 user programmable function buttons
· Built-in rechargeable lithium-ion battery
· Detachable payload tray
Understanding CRX10
Education Robot 37
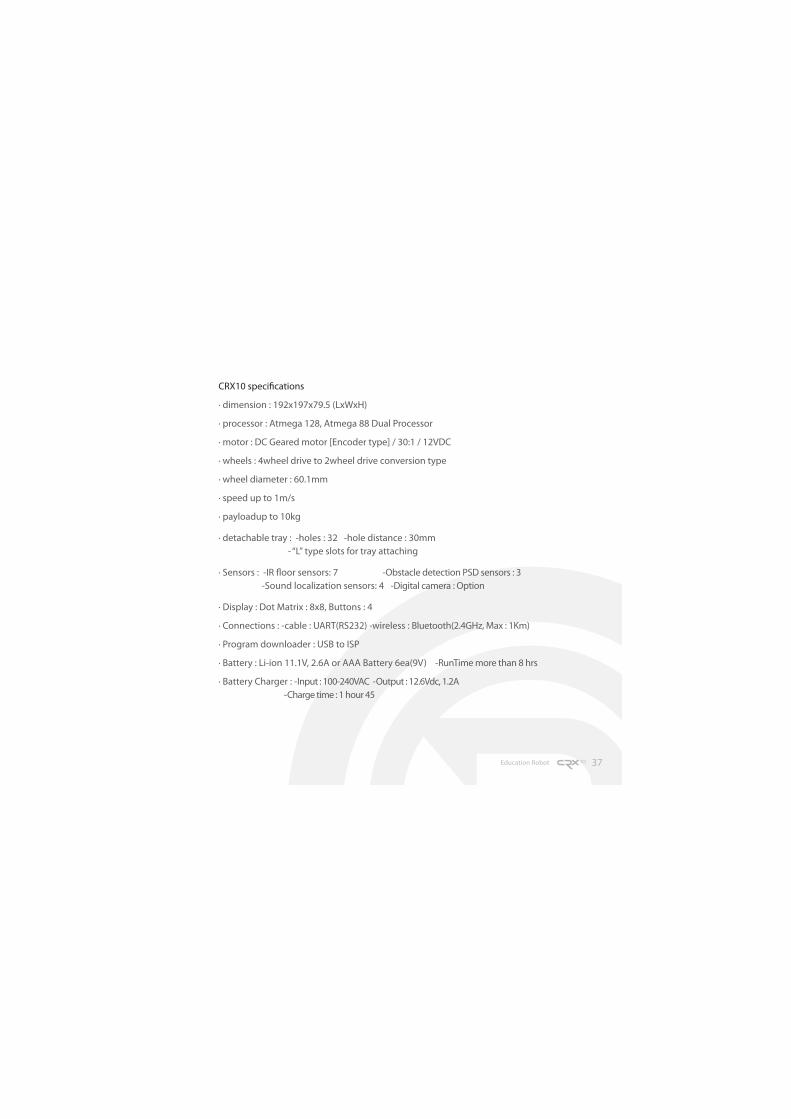
CRX10 speci!cations
· dimension : 192x197x79.5 (LxWxH)
· processor : Atmega 128, Atmega 88 Dual Processor
· motor : DC Geared motor [Encoder type] / 30:1 / 12VDC
· wheels : 4wheel drive to 2wheel drive conversion type
· wheel diameter : 60.1mm
· speed up to 1m/s
· payloadup to 10kg
· detachable tray : -holes : 32 -hole distance : 30mm
- “L” type slots for tray attaching
· Sensors : -IR "oor sensors: 7 -Obstacle detection PSD sensors : 3
-Sound localization sensors: 4 -Digital camera : Option
· Display : Dot Matrix : 8x8, Buttons : 4
· Connections : -cable : UART(RS232) -wireless : Bluetooth(2.4GHz, Max : 1Km)
· Program downloader : USB to ISP
· Battery : Li-ion 11.1V, 2.6A or AAA Battery 6ea(9V) -RunTime more than 8 hrs
· Battery Charger : -Input : 100-240VAC -Output : 12.6Vdc, 1.2A
-Charge time : 1 hour 45

Education Robot38
CRX10 structure
CRX10 Description
- Front and side view

Education Robot 39
Autonomous vehicle
Robot uses 3 Infrared sensors for obsta-
cle avoiding and autonomous drive.
Line tracking
Robot uses an IR sensor to detect and
track line.
Main functions

Education Robot40
Payload
Up to 10 kg
Maximum angle of
surmountable slope
Max slope that robot is able to climb
about 15°
Main functions

Education Robot 41
360 degree rotation robot
Robot can rotate through a full 360 de-
gree. Great robot maneuverabilty can be
used for implementing obstacle avoid-
ance algorithms.
Counterclockwise rotation
Counterclockwise rotation
Main functions

Education Robot42
Remote communication
Robot is equiped with a antenna to ex-
tend the communication distance. Re-
mote communication up to 1 km.
Audio source tracking
Robot has 4 built-in microphones for
sound localization and tracking.
Main functions

Education Robot 43
Demountable structure
Robot can be easily upgraded and
customized.
Dot Matrix
8x8 LED Dot Matrix is used to repre-
sent characters, symbols and images
Main functions

Education Robot44
VPL Visual Programming Language
Robot supports Microsoft VPL. User
can set up the Bluetooth communica-
tion between robot and PC via VPL.
AVR training (Micro Controller)
User can learn microcontroller progra
mming (ATmega128 and ATmega88)
using C language.
Main functions

Education Robot 45
Simple Programming Language
Robot supports Microsoft SPL. User
can set up the Bluetooth communica-
tion between robot and PC via SPL.
Android
Robot supports Android. User can de-
velop smartphone applications
Main functions

Education Robot46
System Block Diagram

Education Robot 47
System Block Diagram
Overall structure is divided into ATmega128 and ATmega88, there is a serial
port (RS232c) for wired connection and Bluetooth module for wireless com-
munication. For communication robot uses SPI protocol. The control board uses
external 9V DC power supply, for powering each module separately control
board includes 5V line and 3.3 V regulator. I/O and A/D operates separately
from processor (128, 88).
First, user should download !rmware via USB to ISP communication cable and
then set up Dot Matrix, Buzzer, DC Motor Drive, Encoder, Function buttons (5
I/O modules), IR and PSD sensor (2 A/D models). Atmega 88 processor can’t be
edited by the user. It contains default LED (1 I/O module) and 4 A/D modules
(Mice, Battery check, IR and circuit check setups).

Education Robot48
When the power is on, the power LED located on the right side of robot
next to LED display will light red and when the Bluetooth is on, the LED
located on the left side of robot next to LED display will light blue.
LED indicators and function buttons

Education Robot 49
1 2 3 4 5 6LED state
Descruotion
Function
buttonsDescription
Function buttons

Education Robot50
CRX10 Installation
- Supported types of communication
- Communication
type Communication description
1Bluetooth wireless
Ex) smartphone and wireless communication
2UART wired
Ex) Laser sensor, camera etc.
3ISP for upgrading ATmega 128
Ex) HEX format
speed bit parity stop bit "ow control
115200bps 8 bit no 1 bit no

Education Robot 51
- Charging Method
CRX10 charging
- CRX10 charging scheme

Education Robot52
Software installation
MSRDS installation
$ We o%fer MSRDS CD-Rom and training consultations
AVR Studio installation
- AVR STUDIO
content : ATmega Chip series Development Tool
Source website :
http://www.atmel.com/dyn/products/tools_card.asp?tool_id=2725
Installation !le : !nd it on site
- WIN-AVR
content : Suite of executable software development tools for Atmel AVR
Source website :
http://sourceforge.net/projects/winavr/!les/WinAVR/20081205/
Installation !le: WinAVR-20081205-ins tall.exe
Education Robot 53
Android Installation(Eclipse)
1. Java JDK(Java Development Kit)
Content: Java Development Tool
Source website :
http://www.oracle.com/technetwork/java/javase/downloads/index.html
Installation !le : jdk-6u23-windows-i586.exe
2. Eclipse
Content: Java Development Tools
Source website :
http://www.eclipse.org/downloads/
Installation !le: eclipse-java-helios-SR1-win32.zip
3. ADT(Android Development Tool) Eclipse Plugin
Content : Eclipse Plugin, Android development tool
Source website :
Execute Eclipse, Help>Install New Software ADT installation

Education Robot54
4. Adroid SDK(Software Development Kit)
Content : Android Software Development Kit
Source website :
http://developer.android.com/sdk/index.html
Installation !le: Android-sdk_r09-windows.zip
5. AVD(Android Virtual Device)
content : Android Virtual device
Source :
Execute Eclipse, Window>Android SDK and AVD Manager > create AVD
SPL Simple Programming Language installation
$ We o%er SPL CD-Rom and training consultations

Education Robot 55
Chapter 2 : CRX10 usage guide
CRX10 control protocol
Instructions
- Protocol CRX10 PC
number code number code number code
0 STX 12 IRS-5 24 Torque-B
1 Lenth 13 IRS-6 25 Bumber
2 Check_sum 14 IRS-7 26 Key
3 Command 0 15 MIC-1 27 SP
4 Command 1 16 MIC-2 28 SP
5 PSD-1 17 MIC-3 29 SP
6 PSD-2 18 MIC-4 30 SP
7 PSD-3 19 Encoder-10 31 ETX
8 IRS-1 20 Encoder-11
9 IRS-2 21 Encoder-20
10 IRS-3 22 Encoder-21
11 IRS-4 23 Torque-A

Education Robot56
PC CRX10
number code number code number code
0 STX 8 DM-data 0 16 Buzzer
1 Lenth 9 DM-data 1 17 SP
2 Check_sum 10 DM-data 2 18 SP
3 Command 1 11 DM-data 3 19 SP
4 Command 2 12 DM-data 4 20 SP
5 Motor data 1 13 DM-data 5 21 ETX
6 Moter data 2 14 DM-data 6
7 DM-Command 0 15 DM-data 7

Education Robot 57
Motor control
Encoder control
CODE ENCODER-10 ENCODER-11
Descriptionleft motor
forward and backwardLeft side motor speed
Value 0 or 1 0 ~ 1 m/s
CODE TORQUE-A TORQUE-B
Description left motor torque right motor torque
Value 0 ~ 255 0 ~ 255
CODE ENCODER-20 ENCODER-11
Descriptionright motor
forward and backwardRight side motor speed
Value 0 or 1 0 ~ 1 m/s
CODE PDS-1 PDS-2 PDS-3
Description 1st sensor 2nd sensor 3rd sensor
Value 100mm ~ 800mm 100mm ~ 800mm 100mm ~ 800mm
Motor control
- IR distance sensor

Education Robot58
Floor sensor
CODE IRS-4 IRS-5 IRS-6
Description
Value
CODE IRS-1 IRS-2 IRS-3
Description
Value
CODE IRS-7
Description
Value

Education Robot 59
microphones
I/O control method
Button
DISPLAY (8x8)
CODE MIC-1 MIC-2 MIC-3 MIC-1
Description
Value
CODE BUTTON
Description
Value
CODE DM-Command
Description
Value 0~9, A~Z
Next page...

Education Robot60
Buzzer
Battery voltage
0x00~0xFF 0x00~0xFF 0x00~0xFF 0x00~0xFF
0x00~0xFF 0x00~0xFF 0x00~0xFF 0x00~0xFF
DISPLAY (8x8)

Education Robot 61
Q No rim c verings?
A
Q No wheel or wheel fell o% the robot?
A
Q No Bluetooth connection?
A
Q Is robot on? Is it getting power?
A
Q Do you have a sensor problem?
A
Q No download conncetion?
A
Chapter 3 : Troubleshooting
MEMO

Education Robot62
Technical support
Before contacting Customer Service, please refer to the
CRX10’s Manual. If you have any further questions please contact
the Customer Center at [email protected]
CNRobot Customer Center Address
#306, Bussiness Incubation Center, Mokwon Univ, 21 Mokwon Gil,
Seo-ku, Daejeon, Korea <302-729>
Website
www.cnrobot.co.kr
TEL / FAX
+82-42-536-2266 / +82-42-536-1472

Education Robot 63
Failure to follow these terms and conditions could result in
death or injury
Make sure that the plug is properly inserted in the outlet or
else !re/electric shock will be caused.
If the product will not be used for an extended period,
remove the battery to prevent leakage.
To avoid the robot from being entangled, no materials made
of fabric should be in front of it.
Make sure that your DC and battery charger connected in a
proper way.
Do not sit or stand on robot or else product damage will be
caused.
Avoid water/ liquid or else product defects will be caused.
Education Robot64
Any performance of repairs or alternations by any person
other than the original supplier will invalidate the warranty.
Do not use any other type of battery charger. This could
lead to damage to the robot and personal injury
Do not touch charger if your hands are wet or else !re/
electric shock will be caused.
Please don’t tightly pull and drag the power cord or replace
it, or else the !re/electric shock will be caused.
Avoid !re and anything "ammable or else the !re/electric
shock will be caused.
Keep !ngers, hair, all other body parts and clothing away
from moving and rotating parts of the robot.
Failure to follow these terms and conditions can result in minor
injurity or product damage

Education Robot 65







![8x8 Dot Matrix Display Module [User Manual] · 8x8 Dot Matrix Display Module Pin Connections SR. No. 8x8 Dot Matrix Display Module Pin Connection Arduino Pin Connection 1 VCC +5V](https://static.fdocuments.net/doc/165x107/5ea47a629c45e265b55fd565/8x8-dot-matrix-display-module-user-manual-8x8-dot-matrix-display-module-pin-connections.jpg)