
第二节 直流电机 铭牌数据及主要系列
113
第第第 第第第第第第第第第第第第第 第第第 第第第第第第第第第 第第第第第第第第第第第第第第第第第第第第 第第第第第 , 第第第第第第 第第第第第第第第第第第第第第第第第第第第第 、、、、 第第第第第第第 第第第第第第第第第第第第第第第第第第第第 , 第第第第第第第第。 第第第 第第第第第第第 第第第 第第第第第第第第第第第第第第第第第第 第第第 第第第第第第第 第第第 第第第第第 第第 第 第第第第第第第第第第第第 第 第 第第第第 一 第第第 第第第第第
description
第一章 直流电机. 本章主要讨论直流电机的基本结构和工作原理,讨论直流电 机的磁场分布、感应电动势、电磁转矩、电枢反应及影响、换向 及改善换向方法,从应用角度分析直流发电机的运行特性和直流 电动机的工作特性。. 第一节 直流电机的工作原理与结构. 第二节 直流电机 铭牌数据及主要系列. 第三节 直流电机的电枢 绕组. 第四节 直流电机的 磁场. 第五节 直流电机的 电磁转矩和电枢电动势的计算. 第六节 直流电机 的换向. 第七节 直流发电机. 第八节 直流电动机. 第一节 直流电机的工作原理与结构. - PowerPoint PPT Presentation
Transcript of 第二节 直流电机 铭牌数据及主要系列

第二节 直流电机铭牌数据及主要系列第三节 直流电机的电枢绕组
本章主要讨论直流电机的基本结构和工作原理,讨论直流电机的磁场分布、感应电动势、电磁转矩、电枢反应及影响、换向及改善换向方法,从应用角度分析直流发电机的运行特性和直流电动机的工作特性。
第四节 直流电机的磁场第五节 直流电机的电磁转矩和电枢电动势的计算第六节 直流电机的换向第七节 直流发电机
第一节 直流电机的工作原理与结构
第一章 直流电机
第八节 直流电动机

第一节 直流电机的工作原理与结构
一、直流电机的主要结构
定子
转子
主磁极:产生恒定的气隙磁通,由铁心和励磁绕组构成换向磁极:改善换向。电刷装置:与换向片配合 ,完成直流与交流的互换机座和端盖:起支撑和固定作用。
电枢铁心:主磁路的一部分,放置电枢绕组。电枢绕组:由带绝缘的导线绕制而成,是电路部分。换向器:与电刷装置配合 ,完成直流与交流的互换转轴轴承

二、直流电机的工作原理(一)直流发电机工作原理
直流发电机是将机械能转变成电能的旋转机械。
右图为直流发电机的物理模型, N、 S为定子磁极, abcd是固定在可旋转导磁圆柱体上的线圈,线圈连同导磁圆柱体称为电机的转子或电枢。线圈的首末端 a、 d连接到两个相互绝缘并可随线圈一同旋转的换向片上。转子线圈与外电路的连接是通过放置在换向片上固定不动的电刷进行的。

当原动机驱动电机转子逆时针旋转时同,线圈 abcd 将感应电动势。如右图,导体 ab在 N极下, a点高电位, b点低电位;导体 cd在 S极下,c点高电位, d点低电位;电刷 A极性为正,电刷 B极性为负。
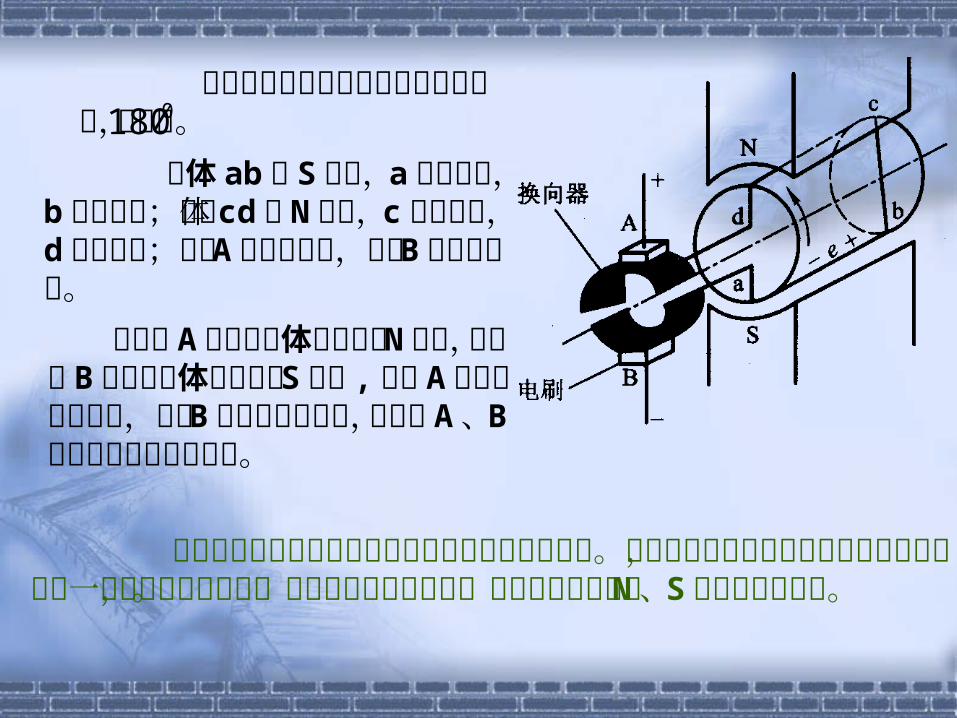
当原动机驱动电机转子逆时针旋转 后,如右图。0180
导体 ab在 S极下, a点低电位, b点高电位;导体 cd在 N极下, c点低电位, d点高电位;电刷 A极性仍为正,电刷 B极性仍为负。 与电刷 A接触的导体总是位于N极下,与电刷 B接触的导体总是位于 S极下 ,电刷 A的极性总是正的,电刷 B的极性总是负的,在电刷 A、 B两端可获得直流电动势。 实际直流发电机的电枢是根据实际需要有多个线圈。线圈分
布在电枢铁心表面的不同位置,按照一定的规律连接起来,构成电机的电枢绕组。磁极也是根据需要 N、 S极交替旋转多对。
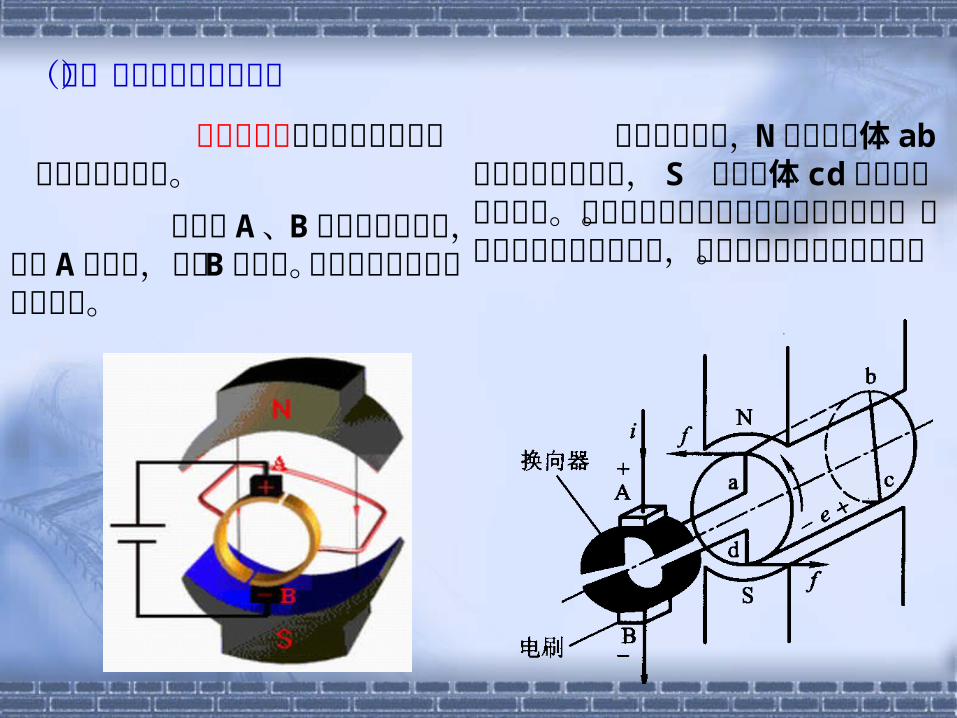
(二)直流电动机工作原理
直流电动机是将电能转变成机械能的旋转机械。
把电刷 A、 B接到直流电源上,电刷 A接正极,电刷 B接负极。此时电枢线圈中将电流流过。
在磁场作用下, N极性下导体 ab受力方向从右向左, S 极下导体 cd受力方向从左向右。该电磁力形成逆时针方向的电磁转矩。当电磁转矩大于阻转矩时,电机转子逆时针方向旋转。

当电枢旋转到右图所示位置时
原 N极性下导体 ab转到 S极下,受力方向从左向右,原 S 极下导体 cd转到 N极下,受力方向从右向左。该电磁力形成逆时针方向的电磁转矩。线圈在该电磁力形成的电磁转矩作用下继续逆时针方向旋转。
与直流发电机相同,实际的直流电动机的电枢并非单一线圈,磁极也并非一对。

直流电动机的工作原理示意图 :
(三)直流电机的可逆原理
一台电机既可作为发电机运行,又可作为电动机运行,这就是直流电机的可逆原理。
从上述直流电机的工作原理来看,一台直流电机若在电刷两端加上直流电压,输入电能,即可拖动生产机械,将电能变为机械能而成为电动机;反之若用原动机带动电枢旋转,输入机械能,就可在电刷两端得到一个直流电动势作为电源,将机械能变为电能而成为发电机。

第二节 直流电机的铭牌数据及主要系列

一、直流电机的铭牌数据
额定条件下电机所能提供的功率
NP额定功率 指电刷间输出的额定电功率发电机指轴上输出
的机械功率 电动机
发电机:是指输出额定电压;
电动机:是指输入额定电压。
在额定工况下,电机出线端的平均电压
NU额定电压
在额定电压下,运行于额定功率时对应的电流
NI额定电流
在额定电压、额定电流下,运行于额定功率时对应的转速。
Nn额定转速
fNI额定励磁电流
对应于额定电压、额定电流、额定转速及额定功率时的励磁电流
电机铭牌上还标有其它数据,如励磁电压、出厂日期、出厂编号等。

电机运行时,所有物理量与额定值相同——电机运行于额定状态。电机的运行电流小于额定电流——欠载运行;运行电流大于额定电流——过载运行。长期欠载运行将造成电机浪费,而长期过载运行会缩短电机的使用寿命。电机最好运行于额定状态或额定状态附近,此时电机的运行效率、工作性能等比较好。二、直流电机系列 所谓系列电机就是在应用范围、结构形式、性能水平和生产工艺等方面有共同性,功率按一定比例递增,并成批生产的一系列电机。我国目前生产的直流电机的主要系列有:
Z3 系列 为一般用途的小型直流电机系列。ZF 和 ZD 系列 为一般用途的中型直流电机系列。ZZJ 系列 为起重、冶金用直流电动机系列。
此外还有 ZQ直流牵引电动机系列及 Z-H和 ZF-H 船用电动机和发电机系列等。
第三节 直流电机的电枢绕组
一、直流电机电枢绕组的一般介绍元件:构成绕组的线圈称为绕组元件,分单匝和多匝两种。
元件的首末端:每一个元件均引出两根线与换向片相连,其中一根称为首端,另一根称为末端。
极距:相邻两个主磁极轴线沿电枢表面之间的距离,用 表示。D
t =2 p
叠绕组:指串联的两个元件总是后一个元件的端接部分紧叠在前一个元件端接部分,整个绕组成折叠式前进。
波绕组:指把相隔约为一对极距的同极性磁场下的相应元件串联起来,象波浪式的前进。第一节距 :一个元件的两个有效边在电枢表面跨过的距离。1y
第二节距 :连至同一换向片上的两个元件中第一个元件的下层边与第二个元件的上层边间的距离。
2y
合成节距 :连接同一换向片上的两个元件对应边之间的距离。y21 yyy 单叠绕组21 yyy 单波绕组
换向节距 :同一元件首末端连接的换向片之间的距离。ky
二、直流电机电枢绕组的基本形式(一) 单叠绕组
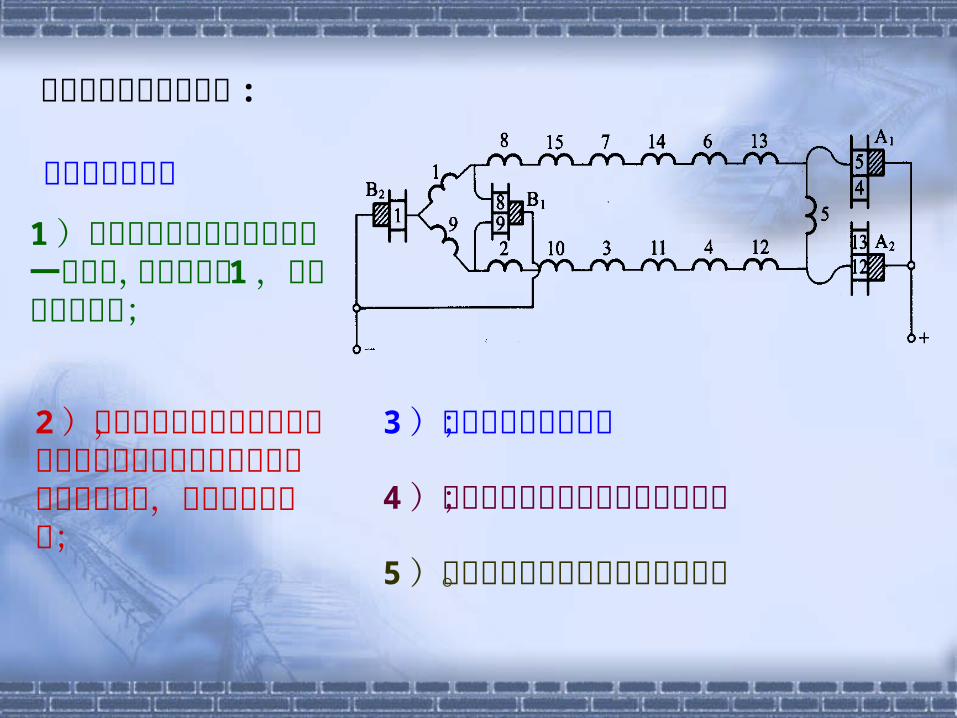
单叠绕组的特点是相邻元件 (线圈 )相互叠压 ,合成节距与换向节距均为 1, 即: 。1 kyy 单叠绕组的展开图是把放在铁心槽里、构成绕组的所有元件取出来画在一张图里,展示元件相互间的电气连接关系及主磁极、换向片、电刷间的相对位置关系。
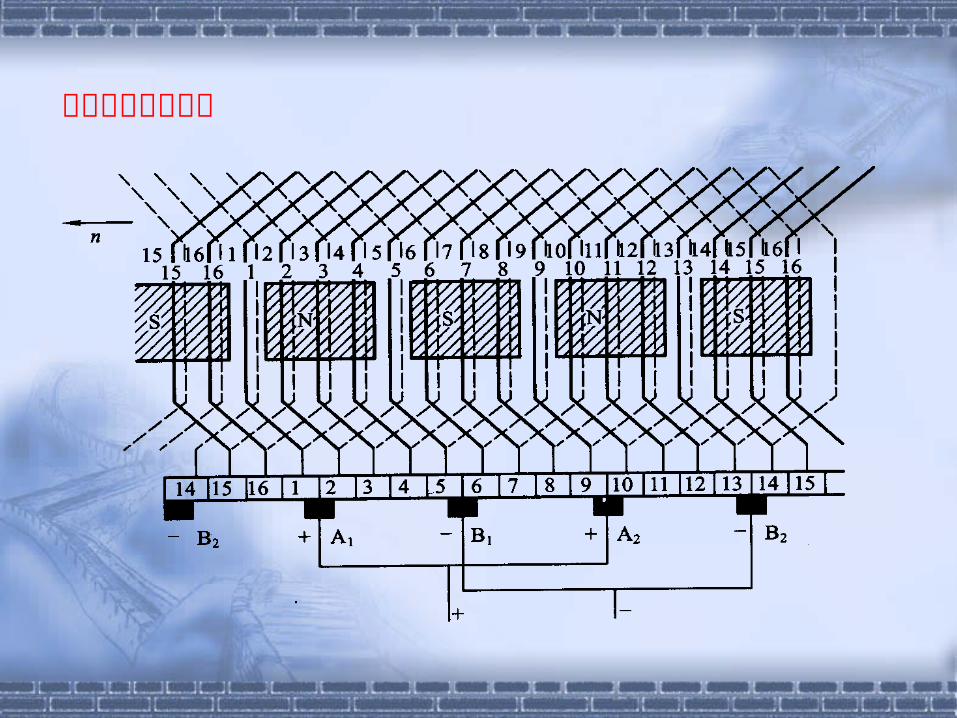
单叠绕组的展开图

根据单叠绕组的展开图可以得到绕组的并联支路电路图 :
单叠绕组的的特点:
1)同一主磁极下的元件串联成一条支路,主磁极数与支路数相同。
2)电刷数等于主磁极数,电刷位置应使感应电动势最大,电刷间电动势等于并联支路电动势。
3)电枢电流等于各支路电流之和。

(二) 单波绕组 单波绕组的特点是合成节距与换向节距相等,展开图如下图所示。
两个串联元件放在同极磁极下,空间位置相距约两个极距;沿圆周向一个方向绕一周后,其末尾所边的换向片落在与起始的换向片相邻的位置。
单波绕组的并联支路图 :
单波绕组的特点
1)同极下各元件串联起来组成一条支路,支路对数为 1,与磁极对数无关;
2)当元件的几何形状对称时,电刷在换向器表面上的位置对准主磁极中心线,支路电动势最大;
3)电刷数等于磁极数;
4)电枢电动势等于支路感应电动势;
5)电枢电流等于两条支路电流之和。
第四节 直流电机的磁场

直流电机中除主极磁场外,当电枢绕组中有电流流过时,还将会产生电枢磁场。电枢磁场与主磁场的合成便形成了电机中的气隙磁场,它直接影响电枢电动势和电磁转矩的大小。要了解气隙磁场的情况,就要先分析清楚主磁场和电枢磁场的特性。
一、直流电机的空载磁场 直流电机的空载是指电枢电流等于零或者很小,电枢磁动势也很小,且可以不计其影响的一种运行状态,此时电机无负载,发电机不输出电功率,电动机不输出机械功率。 所以直流电机空载时的气隙磁场可认为就是主磁场,即由励磁磁动势单独建立的磁场。 当励磁绕组通入励磁电流,各主磁极极性依次呈现为 N 极和 S 极,由于电机磁路结构对称,不论极数多少,每对极的磁路是相同的,因此只要分析一对极的磁路情况就可以了。

图 1-23 直流电机空载时的磁场分布示意图
从图中看出,由 N极出来的磁通,大部分经过气隙和电枢齿 ,再经过电枢磁轭到另一部分的电枢齿 , 又通过气隙进入 S极,再经过定子磁轭回到原来出发的N极,成为闭合回路。
图 1-23是一台四极直流电机空载时的磁场分布示意图(一对极的情形)。
电枢旋转时,能在电枢绕组中感应电动势,或者产生电磁转矩,把这部分磁通称为主磁通,用Φ表示。 此外还有一小部分磁通不进入电枢而直接经过相邻的磁极或定子磁轭形成闭合回路,这部分磁通仅与励磁绕组相匝链,称为漏磁通,用φσ表示。
NS
这部分磁通同时匝链着励磁绕组和电枢绕组,
主磁通磁路的气隙较小,磁导较大,漏磁通磁路的气隙较大,磁导较小,而作用在这两条磁路的磁动势是相同的。
直流电机中,主磁通是主要的,它能在电枢绕组中感应电动势或产生电磁转矩,而漏磁通不与电枢绕组相匝链,没有这个作用,它只是增加主磁极磁路的饱和程度。因此,可只分析主磁通。
当励磁绕组的串联匝数为 ,流过电流 ,每极的励磁磁动势为:
fN fI
fff NIF
所以漏磁通在数量上比主磁通要小得多,大约是主磁通的( 15 ~ 20) %左右。
空载时,励磁磁动势主要消耗在气隙上。当忽略铁磁材料的磁阻时,主磁极下气隙磁通密度的分布就取决于气隙的大小和形状。

若不考虑铁磁材料和齿槽的影响,在极靴下,气隙小且均匀,气隙中沿电枢表面上各点磁通密度较大且基本为常数;在极靴范围外,气隙明显增大,磁通密度显著减小,在磁极之间的几何中性线处,气隙磁通密度为零。
如图 1-24( a)所示,
几何中性线
极靴极身
气隙形状
图 1-24( a)

空载时的气隙磁通密度为一平顶波,如图 1-24(b) 所示。
空载时主磁极磁通的分布情况,如图 1-24(c) 所示。
图 1-24( b)
图 1-24( c)
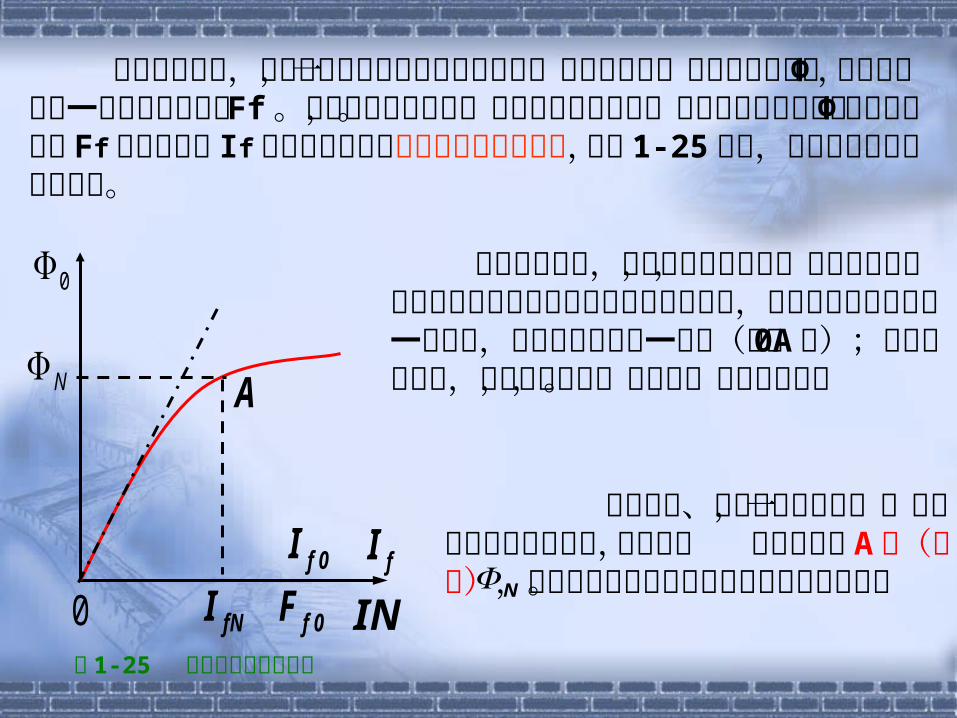
在直流电机中,为了感应电动势或产生电磁转矩,气隙里要有一定数量的主磁通Φ,也就是需要有一定的励磁磁动势 Ff。励磁磁动势变化时,主磁通也随之改变。我们把空载时主磁通Φ与励磁磁动势 Ff或励磁电流 If的关系曲线称为直流电机的磁化曲线,如图 1-25所示,它表明了电机磁路的特性。
图 1-25 直流电机的磁化曲线
当磁通较小时,铁磁部分没有饱和,磁压降很小,整个磁路的磁动势几乎全部消耗在气隙上,而气隙的导磁系数是一个常数,因此曲线近似为一直线(图中 0A段);当磁通增大时,曲线逐渐弯曲,很大时,呈饱和特性。
fNI 0fF0fI
IN
fI
A
0
N
0
为了经济、合理地利用材料,一般直流电机额定运行时,额定磁通 设定在图中 A点(膝部),即在磁化特性曲线开始进入饱和区的位置。
N

直流电机带上负载后,电枢绕组中有电流,电枢电流产生的磁动势称为电枢磁动势。它的出现使电机的磁场发生变化。
图 1-26( a)为一台电刷放在几何中性线的两极直流电机的电枢磁场分布情况。 假设励磁电流为零,只有电枢电流。由图可见电枢磁动势产生的气隙磁场在空间的分布情况,电枢磁动势为交轴磁动势。
二、直流电机负载时的磁场及电枢反应
从对电枢绕组的分析可知,不论什么型式的绕组,其各支路中的电流是通过电刷引入或引出的。在同一支路内元件中电流方向是相同的,而在同一电刷两侧的元件中,电流方向总是相反的。因此,电刷是电枢表面导体中电流方向的分界线。
图 1-26( a)电枢磁场
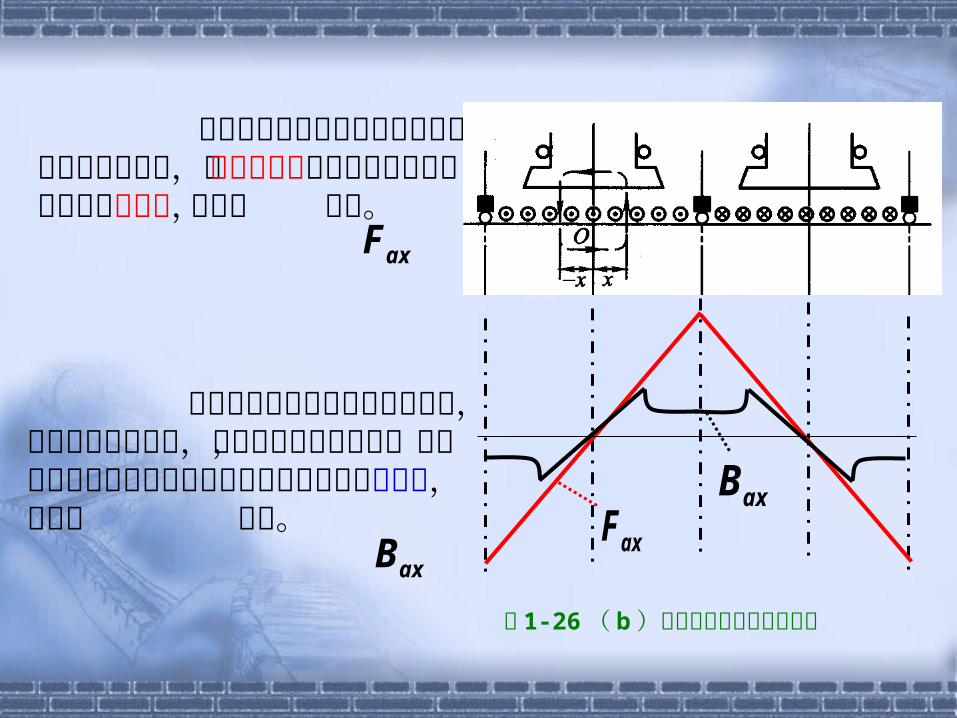
如果认为直流电机电枢上有无穷多整距元件分布,则电枢磁动势在气隙圆周方向空间分布呈三角波,如右图 所示。
axF
由于主磁极下气隙长度基本不变,而两个主磁极之间,气隙长度增加得很快,致使电枢磁动势产生的气隙磁通密度为对称的马鞍型,如图中 所示。
axB axFaxB
图 1-26( b)电枢磁动势和磁场的分布
当励磁绕组中有励磁电流,电机带上负载后,电枢绕组中就有电流流过,它将产生一个电枢磁动势。因此,气隙中的磁场是励磁磁动势和电枢磁动势共同作用的结果。通常把负载时电枢磁动势对主磁场的影响称为电枢反应,电枢反应对直流电机的运行性能影响很大。
显然,电枢反应将与电刷的位置有关,下面将以直流发电机为例,分别讨论不同电刷位置时的电枢反应。
1、电刷在几何中性线上时的电枢反应
在电枢磁动势的作用下,当电刷在几何中性线上时,将主磁场分布和电枢磁场分布叠加,可得到负载后电机的磁场分布情况。如图 1-27( a)所示。
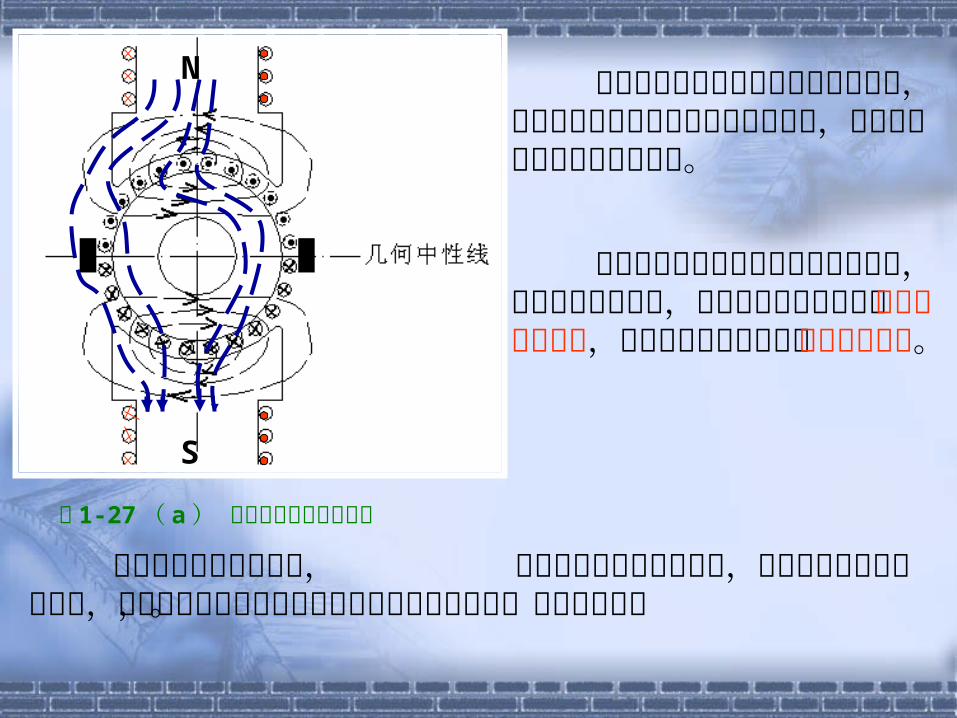
图 1-27( a) 交轴电枢反应磁场分布
若电枢上半部分电流方向为流出纸面,则电枢下半部分电流方向为流入纸面,其电枢磁场磁力线分布如图示。
此时电枢磁场的轴线与电刷轴线重合,并与主极轴线垂直,这时的电枢磁动势称为交轴电枢磁动势,它对主磁场的影响称为交轴电枢反应。
如果主极极性如图所示, 把主磁场与电枢磁场合成,将合成磁场与主磁场比较,可看出电枢磁动势将对主磁场产生很大的影响,即电枢反应。
N
S

xB0
axB
xB
电枢磁场磁通密度分布曲线Bax
主磁场的磁通密度分布曲线Box
两条曲线逐点叠加后得到负载时气隙磁场的磁通密度分布曲线Bδx
图 1-27( b)交轴电枢反应磁通密度分布曲线
下面通过磁通密度分布曲线说明电枢反应的作用如图 1-27( b)所示 :

比较 Bδx 和 Box 两条曲线,得出电枢反应的性质:
磁场为零的位置由空载时在几何中性线逆转向移动了一个角度 α。
说明物理中性线与几何中性线不再重合。
xB0
axB
xB
图 1-27( b)交轴电枢反应磁通密度分布曲线
每一磁极下,主磁场一半被削弱,另一半被加强。
α
几何中性线物理中性线
( 1 )使气隙磁场发生畸变
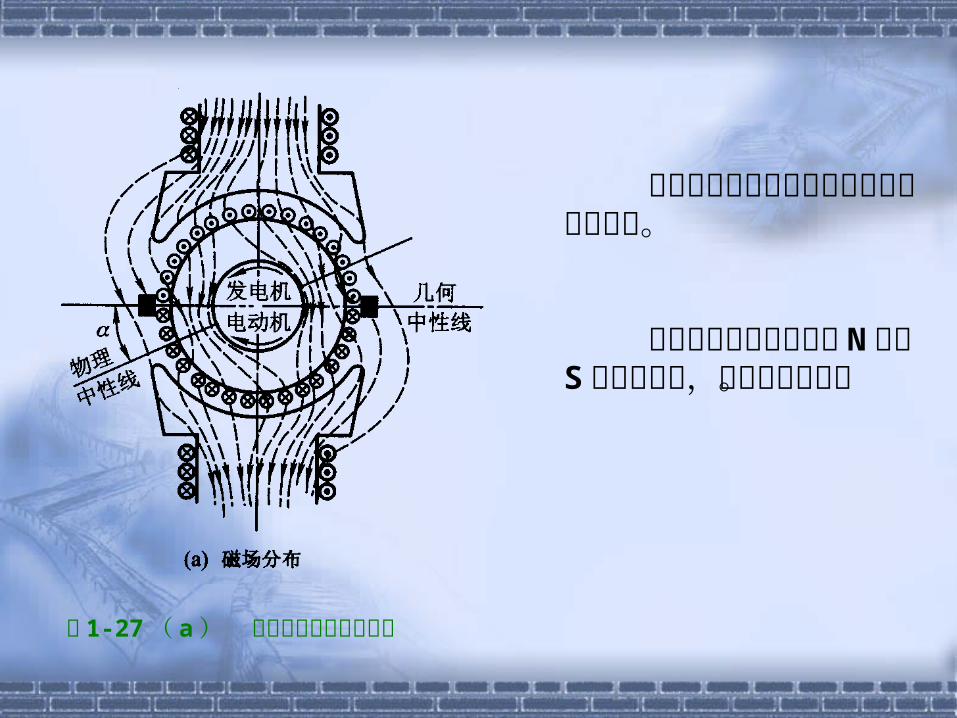
图 1-27( a) 交轴电枢反应磁场分布
物理中性线是指电机中 N极与 S极的分界线,此处磁场为零。
几何中性线是指电气结构上两磁极的中线。

( 2 )对主磁场起去磁作用 磁路不饱和时,主磁场被削弱的数量等于加强的数量,因此每极下的磁通量与空载时相同。但是电机正常运行于磁化曲线的膝部,主磁极增磁部分因磁密增加使饱和程度提高,铁心磁阻增大,增加的磁通会少些,因此负载时合成磁场每极磁通比空载时每极磁通略有减少,这就是电枢反应的去磁作用。
xB0
axB
xB
图 1-27( b)交轴电枢反应磁通密度分布曲线

2、电刷不在几何中性线时的电枢反应如图 1-28所示,
图 1-28 电刷不在几何中性线上的电枢反应
N
S
假设电刷从几何中性线顺电枢转向移动 β角 度,因为电刷是电枢表面导体 电流方向的分界线,故电枢磁 动势轴线也随之移动 β角。
β
这时电枢磁动势可分解为两个相互垂直的分量:交轴电枢磁动势 Faq和直轴电枢磁动势 Fad。
Faq
Fad
交轴电枢反应的性质在前面作了分析,直轴电枢反应若Fad和主磁场方向相同,起增磁作用;相反则起去磁作用。
n

必须说明,为了使电枢反应能起增磁作用而移动电刷,从换向的角度看,都是不允许的。
上述分析是以发电机为例说明的。对电动机而言,若保持主磁场的极性和电枢电流的方向不变,则可看出电动机的转向将与发电机运行时的转向相反,其电枢反应比较如下:
电刷顺转向偏移 电刷逆转向偏移发电机 交轴和直轴去磁 交轴和直轴增磁电动机 交轴和直轴增磁 交轴和直轴去磁
第五节 直流电机的电磁转矩和电枢电动势的计算

一、电磁转矩的计算产生 : 电枢绕组中有电枢电流流过时 ,在磁场内受电磁力的作用 ,
该力与电枢铁心半径之积称为电磁转矩。
大小 :2em a T a
pNT ΦI C ΦI
πa
为电机的转矩常数,有其中πa
pNCT 2
eT CC 9.55
可见,制造好的直流电机其电磁转矩与每极磁通及电枢电流成正比。
性质 : 发电机——制动 (与转速方向相反 ); 电动机——驱动 (与转速方向相同 )。

二、电枢感应电动势的计算产生 : 电枢旋转时 ,主磁场在电枢绕组中感应的电动势简称为
电枢电动势。
大小 :60a e
pNE Φn C Φn
a
)(电动势常数为电机的结构常数其中a
pNCe 60
可见 ,直流电机的感应电动势与电机结构、每极磁通及转速有关。
性质 : 发电机——电源电势 (与电枢电流同方向 ); 电动机——反电势 (与电枢电流反方向 ).
第六节 直流电机的换向
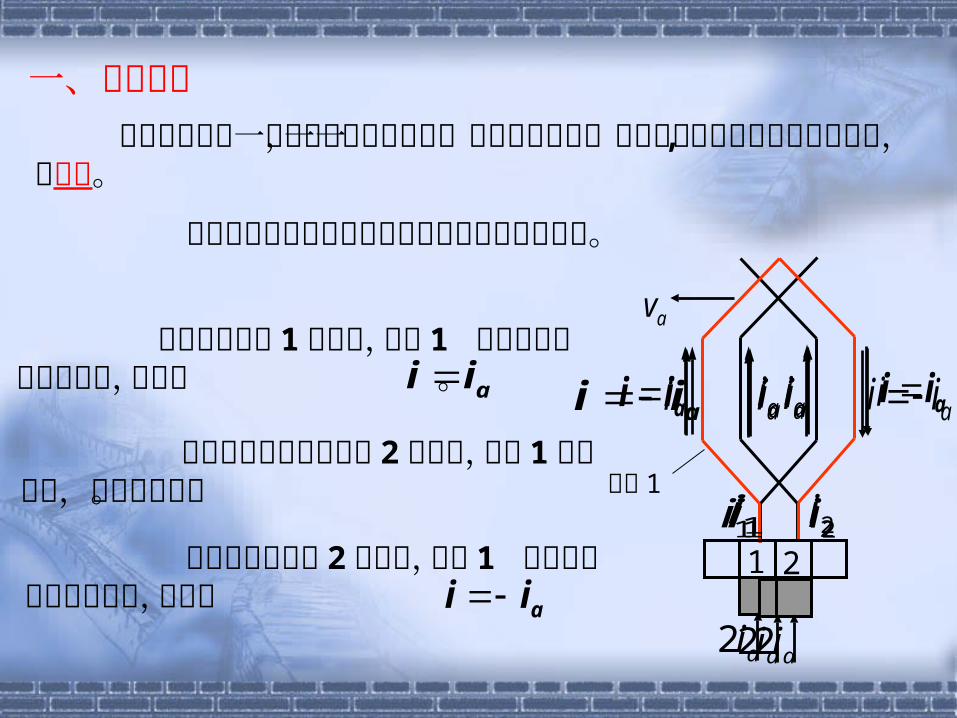
一、换向概述 直流电机的某一个元件经过电刷,从一条支路换到另一条支路时 ,元件里的电流方向改变,即换向。
为了分析方便假定换向片的宽度等于电刷的宽度。
元件1
av
1 2
电刷与换向片 1接触时,元件 1 中的电流方向如图所示,大小为 。aii
aii aii
ai2
ai ai
2i1i
电枢移到电刷与换向片 2接触时,元件 1的被短路,电流被分流。
i i
ai2
ai ai
2i1i 电刷仅与换向片 2接触时,元件 1 中的电流方向如图所示,大小为 aii
aii aii
ai2
ai ai
2i1i

元件从开始换向到换向终了所经历的时间,称为换向周期。换向周期通常只有千分之几秒。直流电机在运行中,电枢绕组每个元件在经过电刷时都要经历换向过程。
换向问题很复杂,换向不良会在电刷与换向片之间产生火花。当火花超过一定程度,就会烧坏电刷和换向器,使电机不能正常工作。
产生火花的原因很多,除了电磁原因外,还有机械的原因。此外换向过程还伴随着电化学和电热学等现象。
二、换向的电磁理论(一)换向元件中的电动势:
1、电抗电动势 ex 由自感电动势和互感电动势合成。自感电动势 和互感电动势 :换向元件(线圈)在换向过程中电流改变而产生的。
Le Me
根据楞次定律,电抗电动势的作用是阻止电流变化的,其方向总是阻碍换向的,即与换向前的电流方向相同。
2、旋转电动势 er
是由于换向元件切割换向区域内的磁场而感应的电动势。方向取决于换向极磁场的极性,为了改善换向,换向极磁动势总是与极下电枢磁动势的方向相反。
因此换向元件中的总电动势为∑ e=ex+er 。

(二)换向元件中的电流变化规律: 设两相邻的换向片与电刷的接触电阻分别是 和 ,元件自身的电阻为 , 流过的电流为 ,元件与换向片间的连线电阻为 ,元件在换向时的回路方程:
1bR2bR
R ikR
1 1k b k bRi (R R )i (R R )i e 忽略元件电阻和元件与换向片间的连线电阻,并设电刷与换向片的接触总电阻为 ,则可推导出换向元件中的电流变化规律为
bR
2ka l k
k kkb
k
eT ti i i i
T TT R ( )t T t

1、直线换向
当∑ e=0时,电流 i 与时间 t呈线性关系。
ai
直线换向
ai
kTt0
2、延迟换向
当∑ e> 0时,换向元件电流随时间不是线性变化,出现电流延迟现象。
延迟换向
3、超越换向
当∑ e< 0时,换向元件电流随时间不是线性变化,出现电流超前现象。 超越换向

三、改善换向的方法 除了直线换向外,延迟和超越换向时的合成电动势不为零,换向元件中产生附加换向电流,附加换向电流足够大时会在电刷下产生火花。还有机械和化学方面的因素也能引起换向不良产生火花。
改善换向一般采用以下方法:
选择合适的电刷,增加换向片与电刷之间的接触电阻
装设换向磁极位于几何中性线处装换向磁极。换向绕组与电枢绕组串联,在换向元件处产生换向磁动势抵消电枢反应磁动势
大型直流电机在主磁极极靴内安装补偿绕组
补偿绕组与电枢绕组串联,产生的磁动势抵消电枢反应磁动势
第七节 直流发电机

一、直流发电机的励磁方式 供给励磁绕组电流的方式称为励磁方式。分为他励和自励两大类,自励方式又分并励、串励和复励三种方式。
1、他励:直流电机的励磁电流由其它直流电源单独供给。
aII G
U
fUfI
aI I
他励直流发电机的电枢电流和负载电流相同,即:

2、并励:
发电机的励磁绕组与电枢绕组并联。且满足
a fI = I+ I
U
I
aE
aIfI
3、串励:
励磁绕组与电枢绕组串联。满足
a fI = I = I
U
I
aI
fI
aE

4、复励:
并励和串励两种励磁方式的结合。电机有两个励磁绕组,一个与电枢绕组串联,一个与电枢绕组并联。
I
aE
U
aI
1fI
2fI
U
aE
I
aI
1fI
2fI

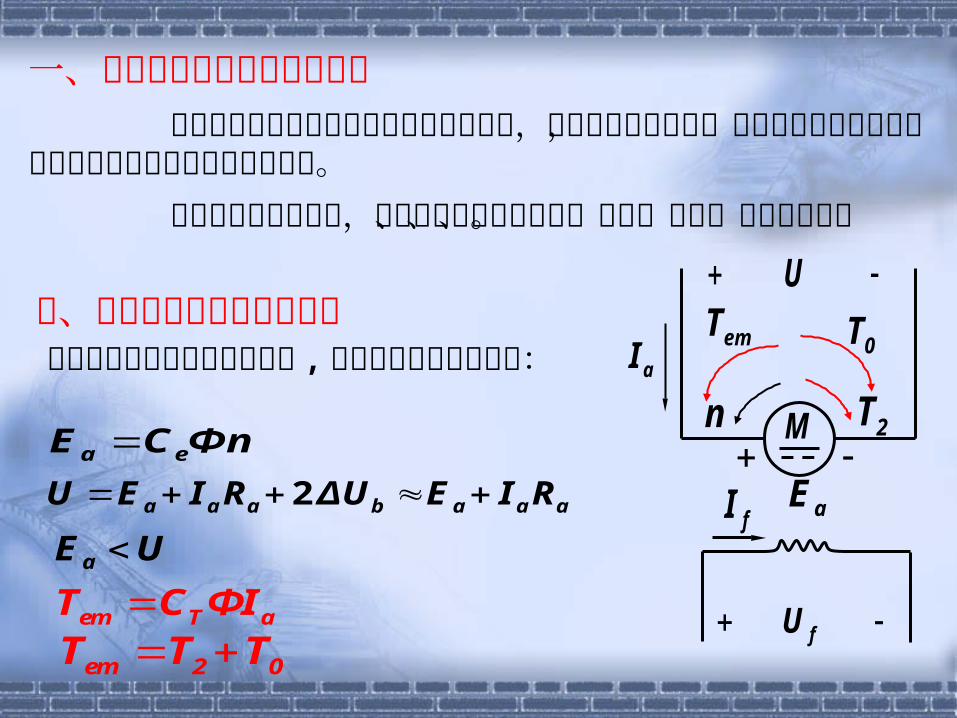
二、直流发电机的基本方程式如图规定各物理量的参考方向 U
aI1T 0T
emTnaE
fI
fU Φ
(一)电动势平衡方程式
2a a a b a aE U I R ΔU U I R
从方程式可见,直流发电机满足
aE U
(二) 转矩平衡方程式
emT发电机轴上有三个转矩:原动机输入给的驱动转矩 、电磁转矩 和机械摩擦及铁损引起的空载转矩 。转矩平衡方程为:
1T0T
1 0emT T T

(三) 功率平衡方程式
原动机输入给发电机的机械功率
1P
mecp机械摩擦损耗 、铁损耗 Fep 、附加损耗 adp空载损耗 包括:0p
电磁功率 aaemem IEΩTPPP 01
aE 电磁功率一方面代表电动势为 的电源输出电流 时发出的电功率,一方面又代表转子旋转时克服电磁转矩所消耗的机械功率。
aI
CuaP电枢回路电阻及电刷与换向器表面接触电阻上的铜损耗
输出的电功率 Cuaem PPP 2cufp自励发电机中还应减去励磁损耗

三、他励发电机的特性(一)空载特性
1Cn 0I )f(IU f定义 :当 、 时,
空载时 aEU
)( fa IfE 空载特性实质上就是 。所以空载特性曲线的形状与空载磁化特性曲线相同。
空载特性曲线上升分支
空载特性曲线下降分支
平均空载特性曲线
U
fI 直流发电机的空载特性是非线性的的,上升与下降的过程是不相同的。实际中通常取平均特性曲线作为空载特性曲线。
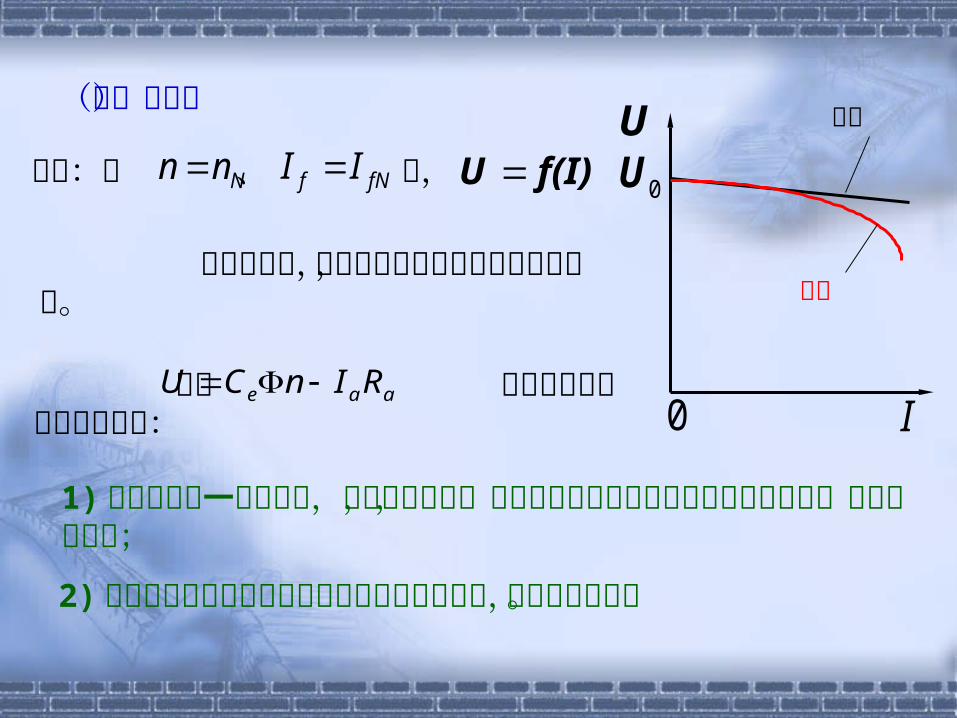
(二)外特性
Nnn fNf II f(I)U 定义:当 、 时, 他励
并励
U
0U
0 I
由曲线可见,负载电流增大时,端电压有所下降。
aae RInCU 根据 可知端电压下降有两个原因:
1) 在励磁电流一定情况下,负载电流增大,电枢反应的去磁作用使每极磁通量减少,使电动势减少;
2) 电枢回路上的电阻压降随负载电流增大而增加,使端电压下降。

(三)调节特性
1Cn 2CU f(I)I f 定义:当 、 时, fI
0 I
由曲线可见,在负载电流变化时,若保持端电压不变,必须改变励磁电流,补偿电枢反应及电枢回路电阻压降对对输出端电压的影响 .
四、并励发电机 并励发电机的励磁是由发电机本身的端电压提供的,而端电压是在励磁电流作用下建立的,这一点与他励发电机不同。并励发电机建立电压的过程称为自励过程,满足建压的条件称为自励条件。
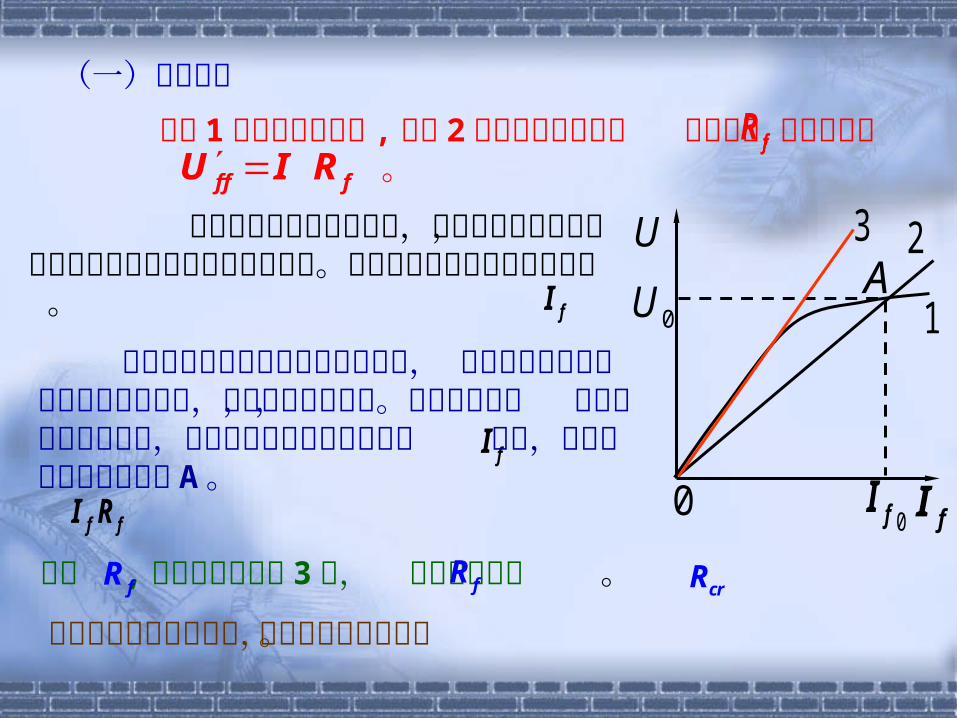
(一)自励过程
fI0
U
1
0fI
A2
0U
曲线 1为空载特性曲线 ,曲线 2为励磁回路总电阻 特性曲线,也称场阻线 。 f f fU I R
fR
原动机带动发电机旋转时,如果主磁极有剩磁,则电枢绕组切割剩磁通感应电动势。在电动势作用下励磁回路产生 。fI
fI
ff RI
如果励磁绕组和电枢绕组连接正确, 励磁电流产生与剩磁方向相同的磁通,使主磁路磁通增加,电动势增大, 增加。如此不断增长,直到励磁绕组两端的电压与 相等,达到稳定的平衡工作点 A。
增大 , 场阻线变为曲线 3时, 称为临界电阻 。fR fRcrR
3
若再增加励磁回路电阻,发电机将不能自励。
可见,并励直流发电机的自励条件有:
( 1)电机的主磁路有剩磁( 2)并联在电枢绕组两端的励磁绕组极性要正确
( 3)励磁回路的总电阻小于该转速下的临界电阻
(二)运行特性并励发电机的空载特性和调节特性与他励发电机并无多大区别。下面只分析并励发电机的外特性。并励发电机的外特性与他励发电机相似,也是一条下降曲线。
对并励发电机,除了像他励发电机存在的电枢反应去磁作用和电枢回路上的电阻压降使端电压下降外,还有第三个原因:由于上述两个原因使端电压下降,引起励磁电流减小,端电压进一步下降。

第八节 直流电动机
一、直流电动机按励磁方式分类 直流电动机的励磁电流都是外电源供给的,和直流发电机相似,励磁方式不同也会使直流电动机的运行性能产生很大差异。 按照励磁方式的不同,直流电动机可分为他励、并励、串励、复励电动机。
二、直流电动机的基本方程式规定各物理量的参考方向如图 ,电动机的基本方程如下:
aE
M
U
aIemT
0T
2Tn
fI
fU
ΦnCE ea
aaabaaa RIEΔURIEU 2
UEa
em T aT C ΦI
em 2 0T T T
)PP(PPPPP adFemecem0em2 aaemCuaem IEΩTPPP 1
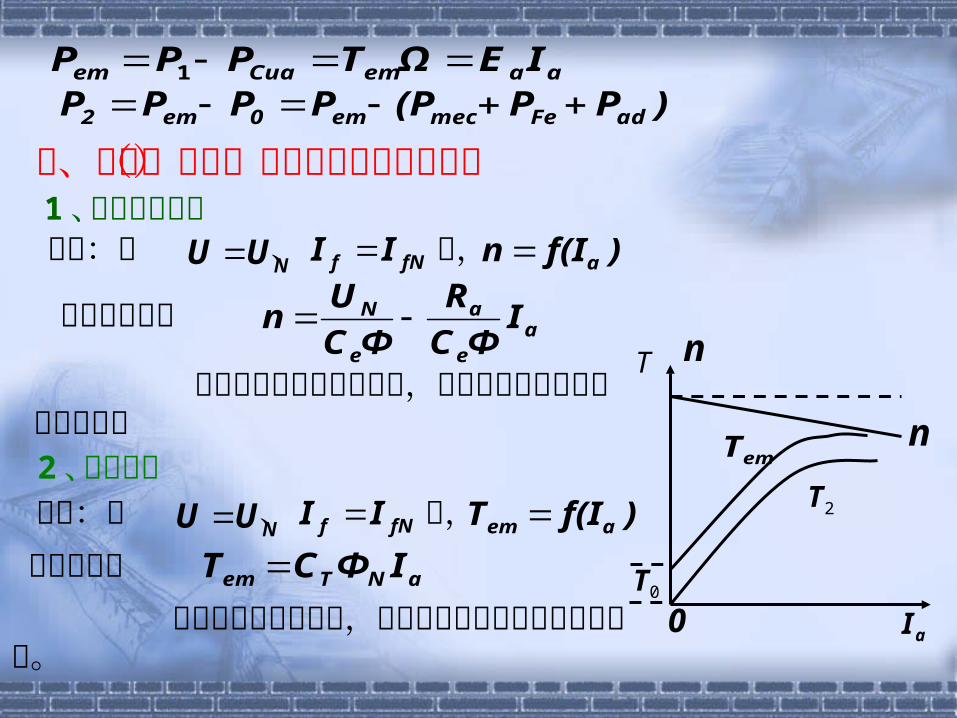
三、他励(并励)直流电动机的工作特性1、转速调整特性
NUU 定义:当 、 时,fNf II )f(In a
由方程式可得 ae
a
e
N IΦC
R
ΦC
Un
忽略电枢反应的去磁作用,转速与负载电流按线性关系变化
aI
n
0
n2、转矩特性
NUU 定义:当 、 时,fNf II )f(IT aem
转矩表达式 aNTem IΦCT 考虑电枢反应的作用,转矩上升的速度比电流上升的慢。
2T
0T
emT
T
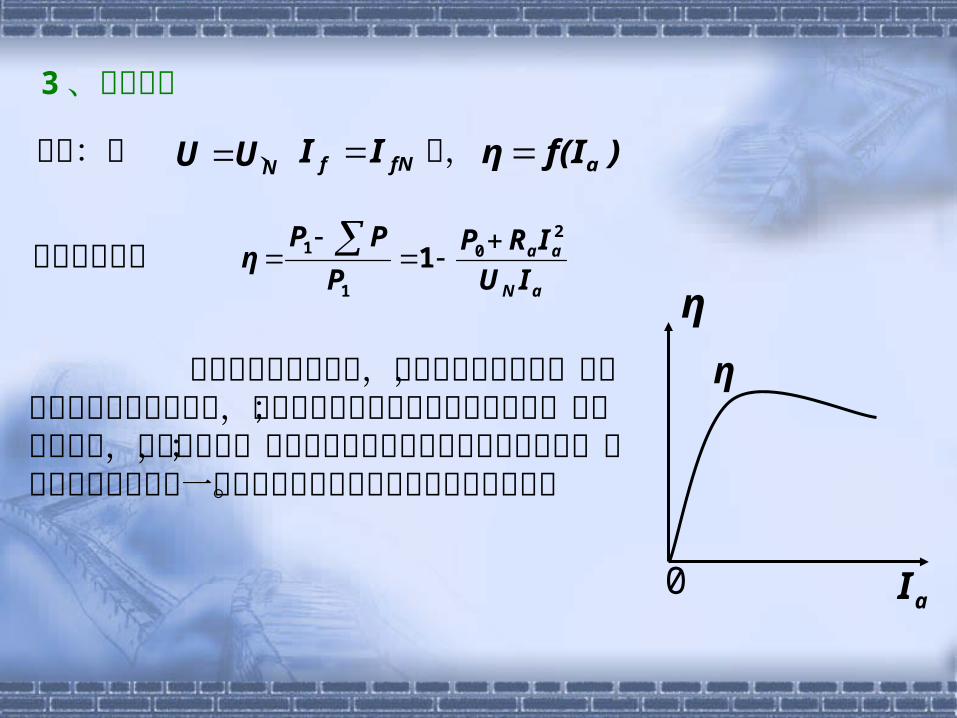
3、效率特性
NUU 定义:当 、 时,fNf II )f(Iη a
由方程式可得aN
aa
IU
IRP
P
PPη
20
1
1 1
空载损耗为不变损耗,不随负载电流变化,当负载电流较小时效率较低,输入功率大部分消耗在空载损耗上;负载电流增大,效率也增大,输入的功率大部分消耗在机械负载上;但当负载电流增大到一定程度时铜损快速增大此时效率又变小。
aI
η
0
η

四、串励电动机的工作特性 当负载电流较小时,电机磁路不饱和,每极气隙磁通与励磁电流呈线性关系。即:
afff IkIkΦ 转速特性
ef
fa
aef
N
e
aa
e
N
Ck
RR
ICk
U
ΦC
IR
ΦC
Un
当负载电流为零时,电机转速趋于无穷大,所以串励电动机不宜轻载或空载运行。
转矩特性 2aTfaTem ICkΦICT
当负载电流较大时,磁路饱和,串励电动机的工作特性与他励电动机相同。
aI
η
0
η
n
emT
nemT
第一节 电力拖动系统的动力学第二节 生产机械的负载转矩特性
第三节 他励直流电动机的机械特性
本章主要介绍电力拖动系统的运动方程、负载转矩特性、直流电动机的机械特性、起动、调速、制动等方法和物理过程。
第四节 他励直流电动机的起动第五节 他励直流电动机的电气制动
第七节 串励直流电动机的电力拖动
第二章 直流电动机的电力拖动
第六节 他励直流电动机的调速
第一节 电力拖动系统的动力学
一、运动方程式
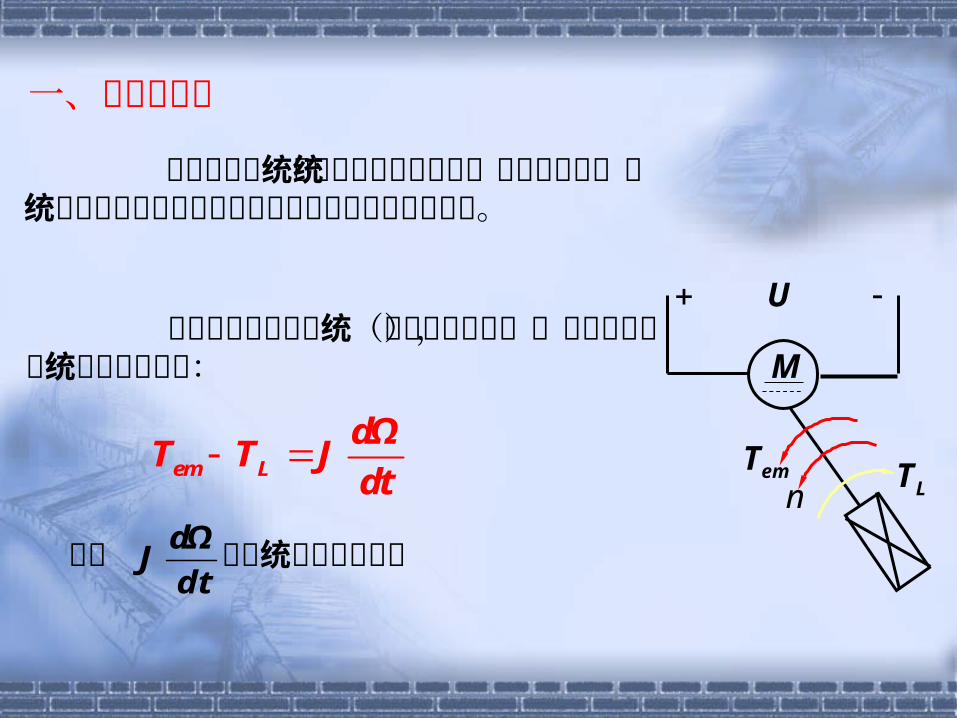
电力拖动系统运动方程式描述了系统的运动状态,系统的运动状态取决于作用在原动机转轴上的各种转矩。
M
emTn LT
U 根据如图给出的系统(忽略空载转矩),可写出拖动系统的运动方程式:
em L
dΩT T J
dt
其中 为系统的惯性转矩。dt
dΩJ
运动方程的实用形式:2
375em L
GD dnT T
dt
系统旋转运动的三种状态
1)当 或 时 ,系统处于静止或恒转速运行状态,即处于稳态。
Lem TT 0dt
dn
2)当 或 时 ,系统处于加速运行状态,即处于动态。Lem TT 0dt
dn
3)当 或 时 ,系统处于减速运行状态,即处于动态。Lem TT 0dt
dn
常把 或 称为动负载转矩 , 把 称为静负载转矩 .
dt
dnGD2
375
)T(T Lem LT

二、运动方程式中转矩正、负号的规定
首先确定电动机处于电动状态时的旋转方向为转速的正方向,然后规定:
( 1)电磁转矩 与转速 的正方向相同时为正,相反时为负。emT n
( 2)负载转矩 与转速 的正方向相同时为负,相反时为正。LT n
emT LT(3)惯性转矩 的大小和正负号由 和 的代数和决定。dt
dnGD2
375
第二节 生产机械的负载转矩特性

负载的转矩特性,就是负载的机械特性,简称负载特性。
一、恒转矩负载 恒转矩负载特性是指生产机械的负载转矩 与转速 无关的特性。分反抗性恒转矩负载和位能性恒转矩负载两种。
nLT
1.反抗性恒转矩负载
TL
n
2.位能性恒转矩负载
TL
n

二、恒功率负载
恒功率负载特点是:负载转矩与转速的乘积为一常数,即 与 成反比,特性曲线为一条双曲线。n
LT
TL
n
三、通风机负载
负载的转矩 基本上与转速 的平方成正比。负载特性为一条抛物线。
LTn
TL
n 理想的通风机特性
实际通风机特性
TL0

第三节 他励直流电动机的机械特性

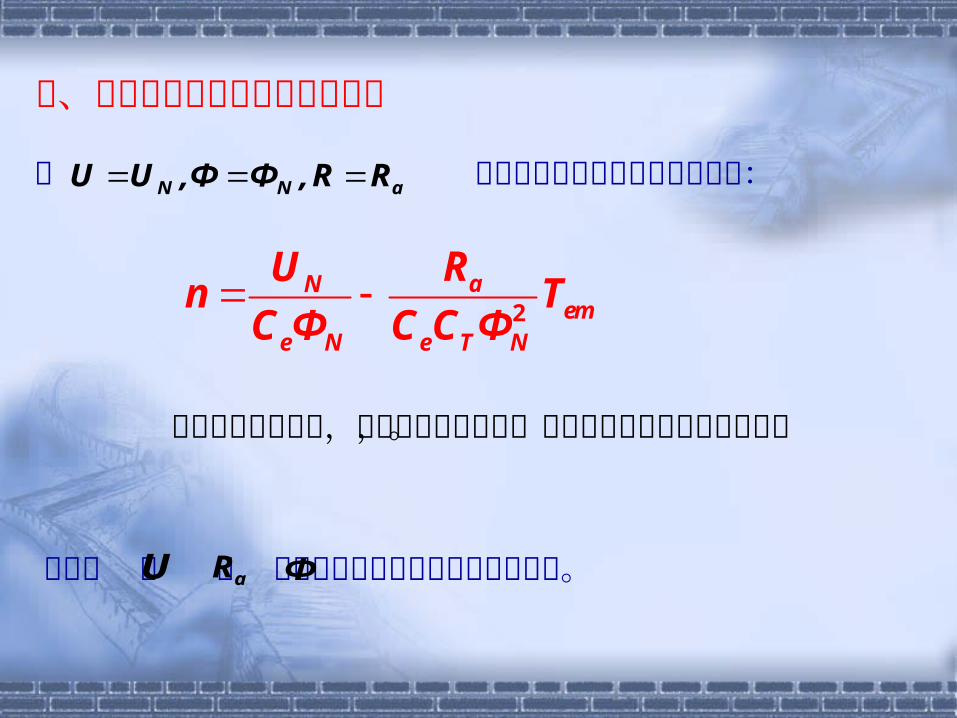
一、机械特性方程式 直流电动机的机械特性是指电动机在电枢电压、励磁电流、电枢回路电阻为恒值的条件下,即电动机处于稳态运行时,电动机的转速与电磁转矩之间的关系: )f(Tn em
由电机的电路原理图可得机械特性的表达式:
2 eme e T
0 em
U Rn T
C Φ C C Φn βT
0n 称为理想空载转速。
0'n0n
Nn
n
emT
NT0T实际空载转速 020 TΦCC
R
ΦC
Un
Tee
二、固有机械特性和人为机械特性
当 时的机械特性称为固有机械特性:aNN RR,ΦΦ,UU
2aN
eme N e T N
RUn T
C Φ C C Φ
由于电枢电阻很小,特性曲线斜率很小,所以固有机械特性是硬特性。
当改变 或 或 得到的机械特性称为人为机械特性。U aR Φ
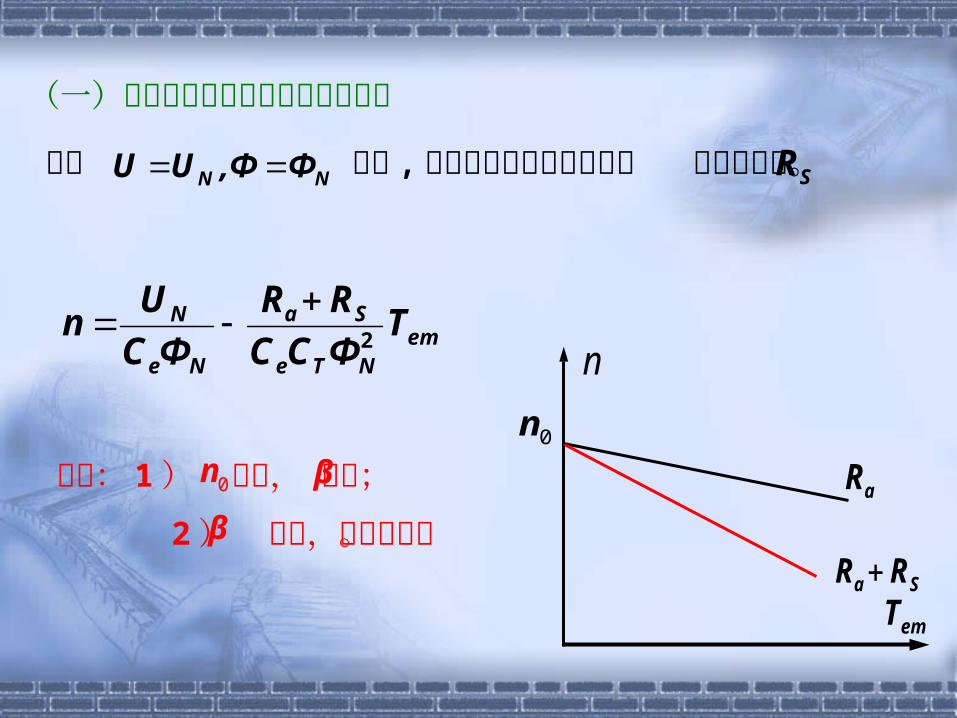
(一)电枢串接电阻时的人为机械特性
保持 不变 ,只在电枢回路中串入电阻 的人为特性。
NN ΦΦ,UU SR
emNTe
Sa
Ne
N TΦCC
RR
ΦC
Un
2
0n
n
aR
emTSa RR
特点: 1) 不变, 变大;
2) 越大,特性越软。0n β
β

(二)改变电枢电压时的人为机械特性
保持 不变,只改变电枢电压时的人为特性:Na ΦΦ,RR
2a
eme N e T N
RUn T
C Φ C C Φ
0nn
NU
emT
1UNUU 1
01n
特点: 1) 随 变化 , 不变 ;
2) 不同 ,曲线是一组平行线。
0n U
U
β

(三)减弱磁通时的人为机械特性
保持 不变,只改变励磁回路调节电阻 的人为特性:Na UU,RR SfR
2aN
eme e T
RUn T
C Φ C C Φ
NΦ
n
0n
emT
kT
01n
1Φ
1kT
2Φ02n
2kT
NΦΦΦ 12
特点: 1)弱磁, 增大;
2)弱磁, 增大0n
β

三、机械特性的绘制(一)固有特性的绘制
)nn,(Tem 00 )nn,T(T NNem 已知 ,求两点 :1)理想空载点 和额定运行 。
NNN,N n,IU,P
具体步骤:(1)估算 :Ra 2
N
NNNa I
PIU)~(R
3
2
2
1
N
NNNNe n
PIUΦC
NeNT ΦCΦC 9.55
(2)计算 :ΦCΦC NTNe 和
(3)计算理想空载点:Ne
Nem ΦC
Un,T 00
(4)计算额定工作点: NNNTN nn,IΦCT
(二)人为特性的绘制 在固有机械特性方程 的基础上,根据人为特性所对应的参数 或 或 变化,重新计算 和 ,然后得到人为机械特性方程式。
em0 βTnn
SRU Φ
0n β
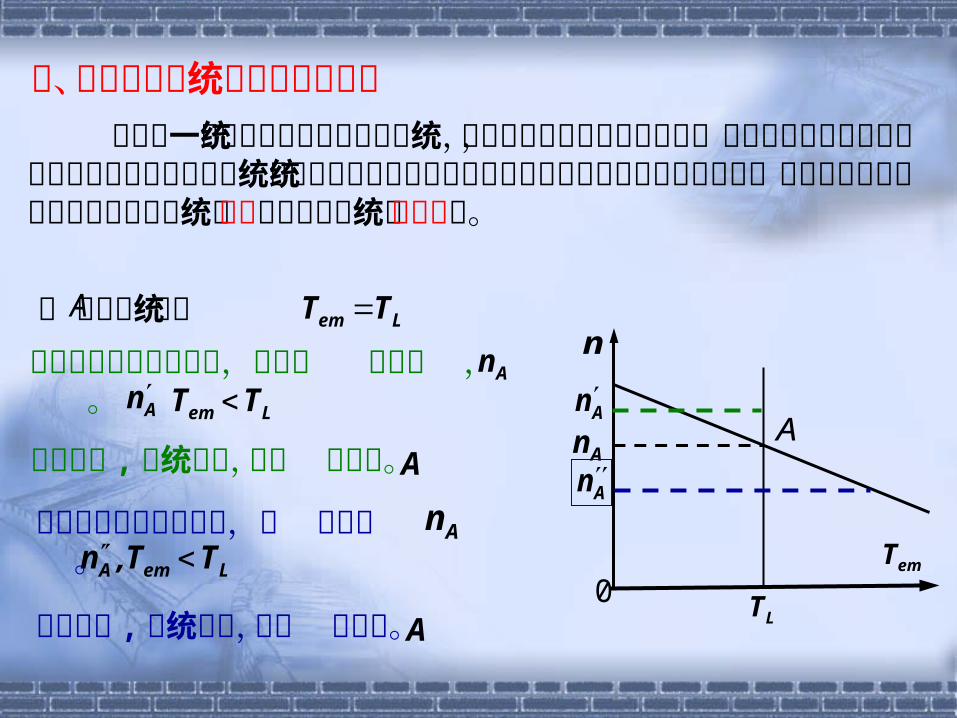
四、电力拖动系统稳定运行的条件 处于某一转速下运行的电力拖动系统,由于受到某种扰动,导致系统的转速发生变化而离开原来的平衡状态,如果系统能在新的条件下达到新的平衡状态,或者当扰动消失后系统回到原来的转速下继续运行,则系统是稳定的,否则系统是不稳定的。
在 点,系统平衡A Lem TT n
A
emT
LT
An
0
扰动使转速有微小增量,转速由 上升到 , 。
An
AnLem TT An
A扰动消失 , 系统减速,回到 点运行。
LemA TT,n 扰动使转速有微小下降,由 下降到 。
AnAn
A扰动消失 , 系统加速,回到 点运行。

在 点,系统平衡B Lem TT n
B
emT
LT
Bn
0
扰动使转速有微小增量,转速由 上升到 , , 系统加速 。
Bn
BnLem TT
Bn
B即使扰动消失 , 也不能回到 点运行。
LemB TT,n 扰动使转速有微小下降,由 下降到 , 系统减速。
BnBn
B即使扰动消失 , 也不能回到 点运行。电力拖动系统稳定运行的充分必要条件是:(1) 必要条件 :电动机的机械特性与负载的转矩特性必须有交点 ,即存在 Lem TT
(2)充分条件 : 在交点处 ,满足 : 。或者说 , 在交点的转速以上存在 , 在交点的转速以下存在
dn
dT
dn
dT Lem
Lem TT Lem TT
第四节 他励直流电动机的起动
电动机的起动是指电动机接通电源后,由静止状态加速到稳定运行状态的过程。
起动瞬间,起动转矩和起动电流分别为
st T st
Nst
a
T C ΦIU
IR
起动时由于转速为零,电枢电动势为零,而且电枢电阻很小,所以起动电流将达很大值。 过大的起动电流将引起电网电压下降、影响电网上其它用户的正常用电、使电动机的换向恶化;同时过大的冲击转矩会损坏电枢绕组和传动机构。一般直流电动机不允许直接起动。
为了限制起动电流,他励直流电动机通常采用电枢回路串电阻或降低电枢电压起动。
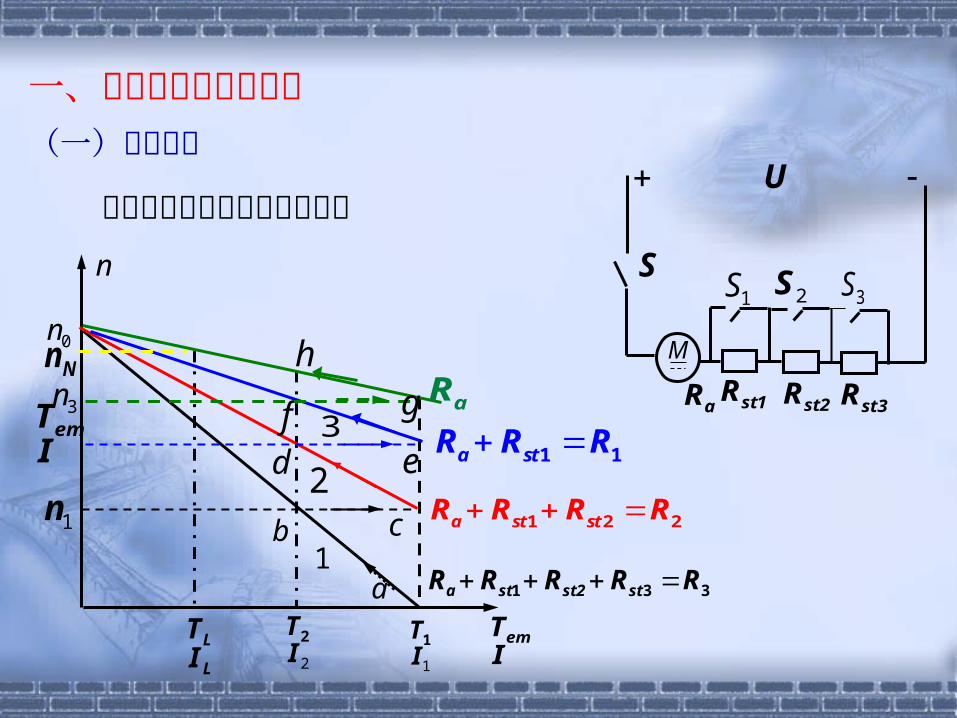
一、电枢电路串电阻起动(一)起动特性
以三级电阻起动时电动机为例
M
aR
S1S
U
1stR2stR 3stR
2S 3S
331 RRRRR st2ststa
L
LIT
2IT2
1IT1
ITem
0n
a
b
n
1
1 2 2a st stR R R R 1n c
d 21 1a stR R R I
Tem
ef 3
aRNn
gh
3n

(二)起动电阻计算
设对应转速 n1、 n2、 n3时电势分别为 Ea1、 Ea2、 Ea3,则有:b点
123 aN EUIR
c 点1aN EUIR 12
d 点 222 aN EUIR
e点211 aN EUIR
f点321 aN EUIR
g点31 aNa EUIR
比较以上各式得:
βI
I
R
R
R
R
R
R
a
2
11
1
2
2
3
在已知起动电流比β和电枢电阻前提下,经推导可得各级串联电阻为 :
1
22
3
12
1
1
111
stma1m
stm
stast
stast
ast
βRRβ)(βR
βRRβ)(βRβRβR)(βR
R)(βR
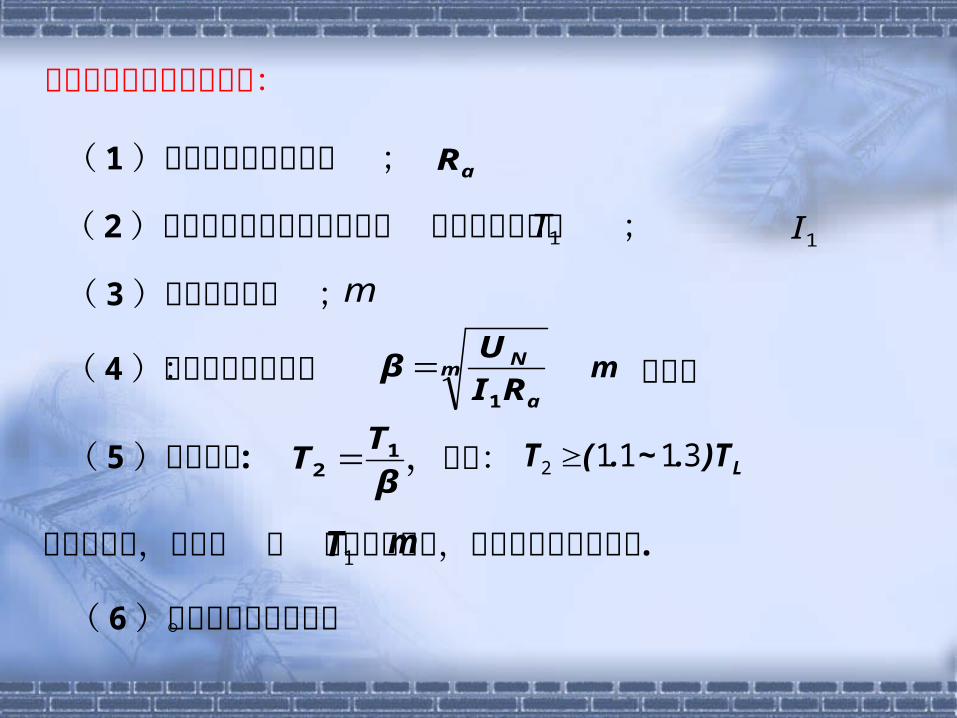
计算各级起动电阻的步骤:
( 1)估算或查出电枢电阻 ;aR
1T 1I( 2)根据过载倍数选取最大转矩 对应的最大电流 ;
m( 3)选取起动级数 ;
( 4)计算起动电流比: m
a
N
RI
Uβ
1
取整数m
( 5)计算转矩 :β
TT 12 ,校验: LT).~.(T 31112
如果不满足,应另选 或 值并重新计算,直到满足该条件为止 .1T m
( 6)计算各级起动电阻。

二、降压起动
当直流电源电压可调时,可采用降压方法起动。
起动时,以较低的电源电压起动电动机,起动电流随电源电压的降低而正比减小。随着电动机转速的上升,反电动势逐渐增大,再逐渐提高电源电压,使起动电流和起动转矩保持在一定的数值上,保证按需要的加速度升速。
降压起动需专用电源,设备投资较大,但它起动平稳,起动过程能量损耗小,因此得到广泛应用。

第五节 他励直流电动机的电气制动
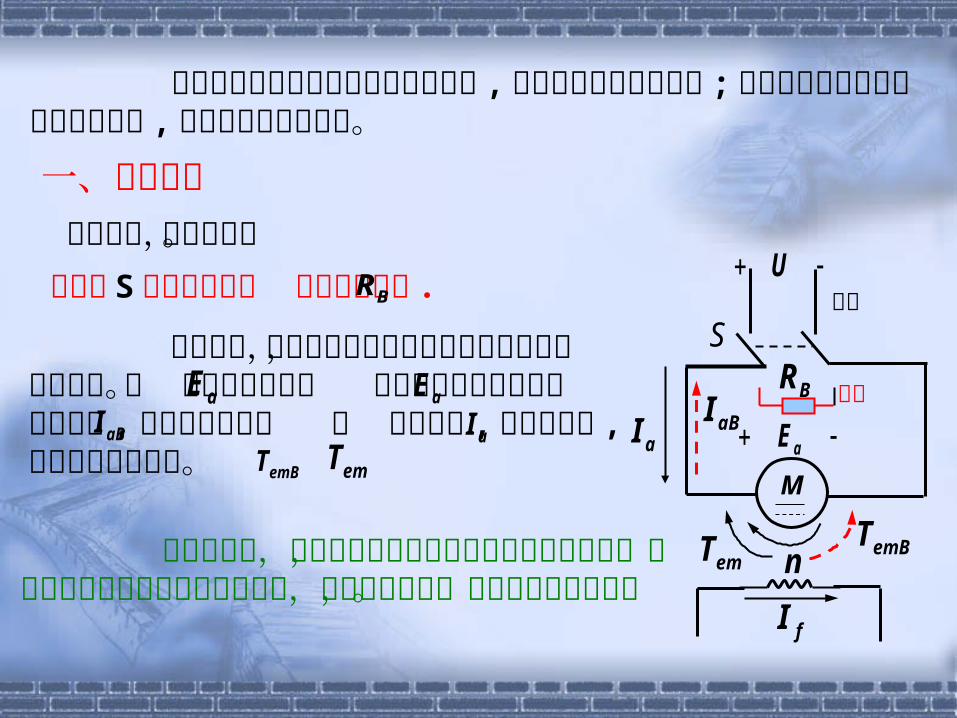
当电磁转矩的方向与转速方向相同时 ,电机运行于电动机状态 ;当电磁转矩方向与转速方向相反时 ,电机运行于制动状态。 一、能耗制动
电动状态,如图所示。 U电动
M
aEaI
nemT
fI
S
将开关 S投向制动电阻 上即实现制动 .BR
制动BRaBI
emBT
由于惯性,电枢保持原来方向继续旋转,电动势 方向不变。由 产生的电枢电流 的方向与电动状态时的 方向相反 ,对应的电磁转矩 与 方向相反 ,为制动性质 , 电机处于制动状态。
aE aE
aBI aI
emBT emT
制动运行时,电机靠生产机械的惯性力的拖动而发电,将生产机械储存的动能转换成电能,消耗在电阻上,直到电机停止转动。

能耗制动时的机械特性为:
20a B
em eme T N
R Rn T βT
C C Φ
n
0n
aRA
0 LT emT
电动机状态工作点
Ba RR
C
B制动瞬间工作点
制动过程工作段
电动机拖动反抗性负载,电机停转。
若电动机带位能性负载 ,稳定工作点

改变制动电阻 的大小可以改变能耗制动特性曲线的斜率 ,从而可以改变制动转矩及下放负载的稳定速度。 越小 , 特性曲线的斜率越小 , 起始制动转矩越大 ,而下放负载的速度越小。
BR
BR
制动电阻越小,制动电流越大。选择制动电阻的原则是
2 2 5aaB max N
a B
EI I ( ~ . ) I
R R
2~2.5a
B aN
ER R
( ) I
其中 为制动瞬间的电枢电动势。aE
能耗制动操作简单 ,但随着转速下降 , 电动势减小 , 制动电流和制动转矩也随着减小 , 制动效果变差。若为了尽快停转电机 ,可在转速下降到一定程度时 ,切除一部分制动电阻 ,增大制动转矩。

二、反接制动(一)电枢反接制动电枢反接制动时接线如图所示。
U电动
M
aEaI
nemT
fI
S
制动
BRaBI
emBT
开关 S投向“电动”侧时,电枢接正极电压,电机处于电动状态。进行制动时,开关投向“制动”侧,电枢回路串入制动电阻 后,接上极性相反的电源电压,电枢回路内产生反向电流:
BR
a aaB
a B a B
U E U EI
R R R R
反向的电枢电流产生反向的电磁转矩,从而产生很强的制动作用——电压反接制动。

电枢反接制动时的机械特性为:
02a BN
em eme N e T N
R RUn T n βT
C Φ C C Φ
曲线如图中 所示。BC
Ba RR
C
B
n
0n
aR
A
0LT emT
LT
0n
D
工作点变化为: 。CBA
制动过程中 、 、 均为负 ,而 、 为正U aI emT n aE
1 0aP UI 表明电机从电源吸收电功率2 2 0emP T Ω T Ω 表明电机从轴上吸收机械功率
0em a aP E I 表明轴上输入的机械功率转变为电枢回路电功率。
可见 , 反接制动时 ,从电源输入的电功率和从轴上输入的机械功率转变成的电功率一起消耗在电枢回路电阻上。
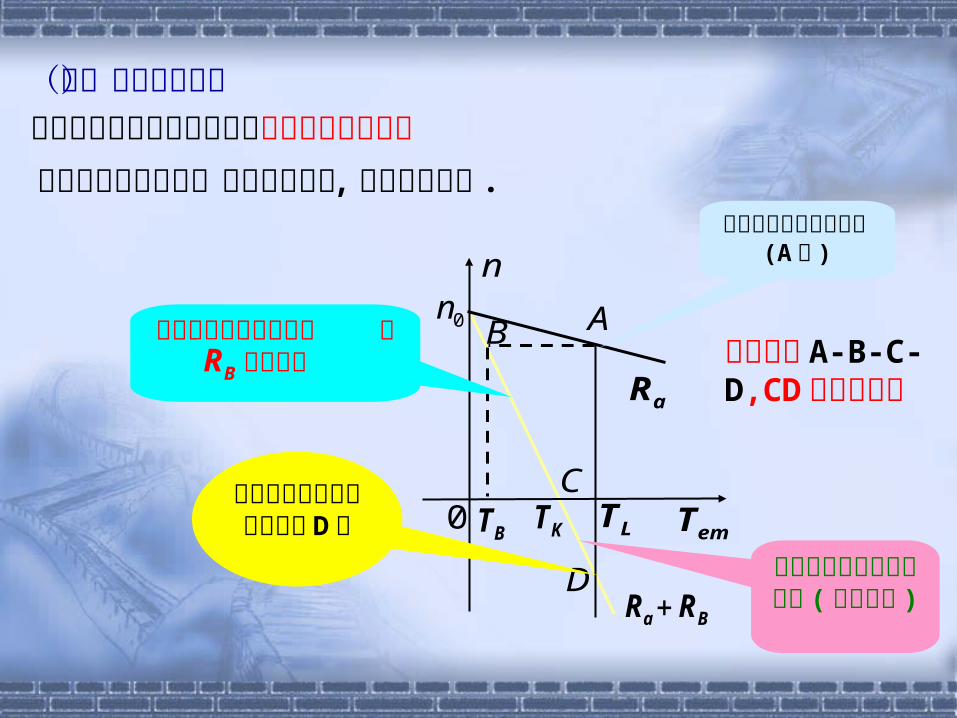
(二)倒拉反接制动倒拉反转反接制动只适用于位能性恒转矩负载在电枢回路中串联一个较大的电阻 , 即可实现制动 .
Ba RR
C
B
n
0n
aR
A
0 LTemTBT
D
KT
正向电动状态提升重物 (A
点 )
电枢回路串入较大电阻 后特性曲线BR
负载作用下电机反向旋转 (下放重
物 )
电机以稳定的转速下放重物 D
点
工作点由 A-B-C-D,CD段为制动段
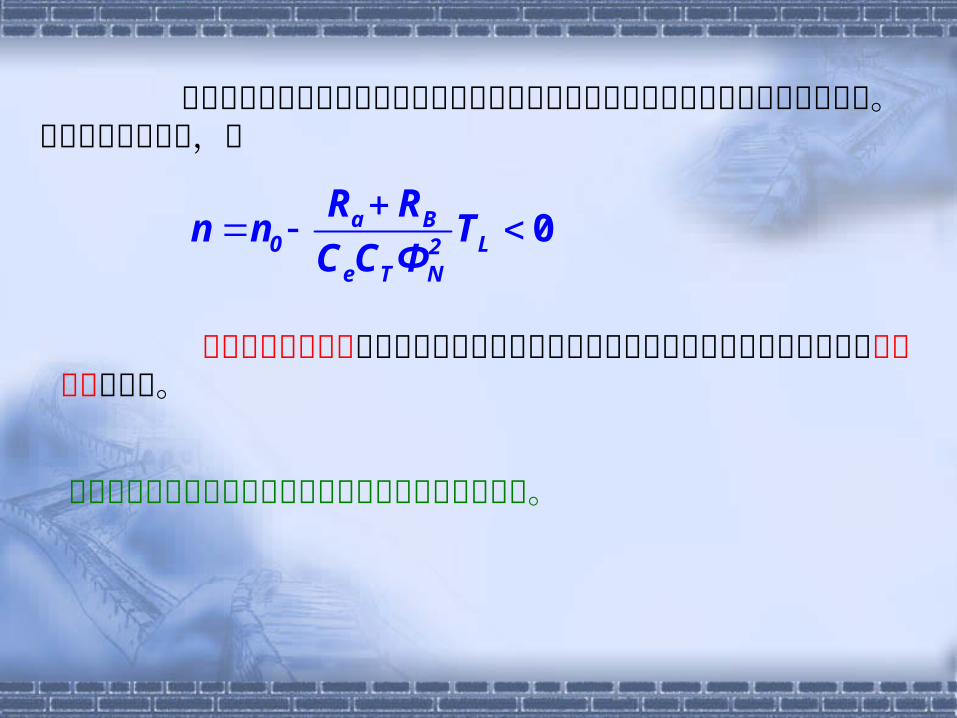
倒拉反转反接制动时的机械特性方程就是电动状态时电枢串电阻时的人为特性方程。由于串入电阻很大,有
0a B0 L2
e T N
R Rn n T
C C Φ
倒拉反转反接制动时的机械特性曲线就是电动状态时电枢串电阻时的人为特性在第四象限的部分。
倒拉反转反接制动时的能量关系和电枢反接制动时相同。

三、回馈制动 电动状态下运行的电动机,在某种条件下会出现 情况,此时 , 反向, 反向,由驱动变为制动。从能量方向看,电机处于发电状态——回馈制动状态。
0nn UEa aI emT
回馈制动时的机械特性方程与电动状态时相同。
稳定运行有两种情况 :
B
n
0nA
0 LTemT
LT
0n
当电车下坡时,运行转速可能超过理想空载转速 ,进入第二象限
电压反接制动带位能性负载进入第四象限

发生在动态过程中的回馈制动过程有以下两种情况 :
1、降压调速时产生的回馈制动
B
n
02n
A
0 LTemT
1U
01n
Cn
An
2UC
12 UU
制动过程为 线段 02Bn
2、增磁调速时产生的回馈制动
B
n
02n
A
0 LTemT
1Φ
01n
Cn
An
2ΦC
12 ΦΦ
制动过程为 线段02Bn
回馈制动时由于有功率回馈到电网,因此与能耗和反接制动相比,回馈制动是比较经济的。

第六节 他励直流电动机的调速

电力拖动系统的调速可以采用机械调、电气调速或二者配合调速。通过改变传动机构速比进行调速的方法称为机械调速;通过改变电动机参数进行调速的方法称为电气调速。
改变电动机的参数就是人为地改变电动机的机械特性,使工作点发生变化,转速发生变化。调速前后,电动机工作在不同的机械特性上。
他励直流电动机的转速为
a a s
e
U I (R R )n
C Φ
电气调速方法 :1.调压调速 ;2.电枢串电阻调速 ;3.调磁调速。

一、调速指标(一)调速范围 :
min
maxn
nD
(二)静差率(相对稳定性)
%n
Δn%
n
nn%δ NN 100100
00
0
指负载变化时,转速变化的程度,转速变化小,稳定性好。
δ%越小,相对稳定性越好; δ%与机械特性硬度和 n0有关。
δ)(1Δn
δn
Δnδ
Δnn
Δnn
n
n
nD
N
max
NN
max
Nmin
max
min
max
0
D与 δ%相互制约 :δ越小 ,D 越小 , 相对稳定性越好 ;在保证一定的 δ指标的前提下 ,要扩大 D,须减少 Δn, 即提高机械特性的硬度。

(三)调速的平滑性
在一定的调速范围内,调速的级数越多,调速越平滑。相邻两级转速之比,为平滑系数
1
i
i
n
n
越接近 1,平滑性越好,当 时,称为无级调速,即转速可以连续调节。调速不连续时,级数有限,称为有级调速。
1
(四)调速的经济性
主要指调速设备的投资、运行效率及维修费用等。
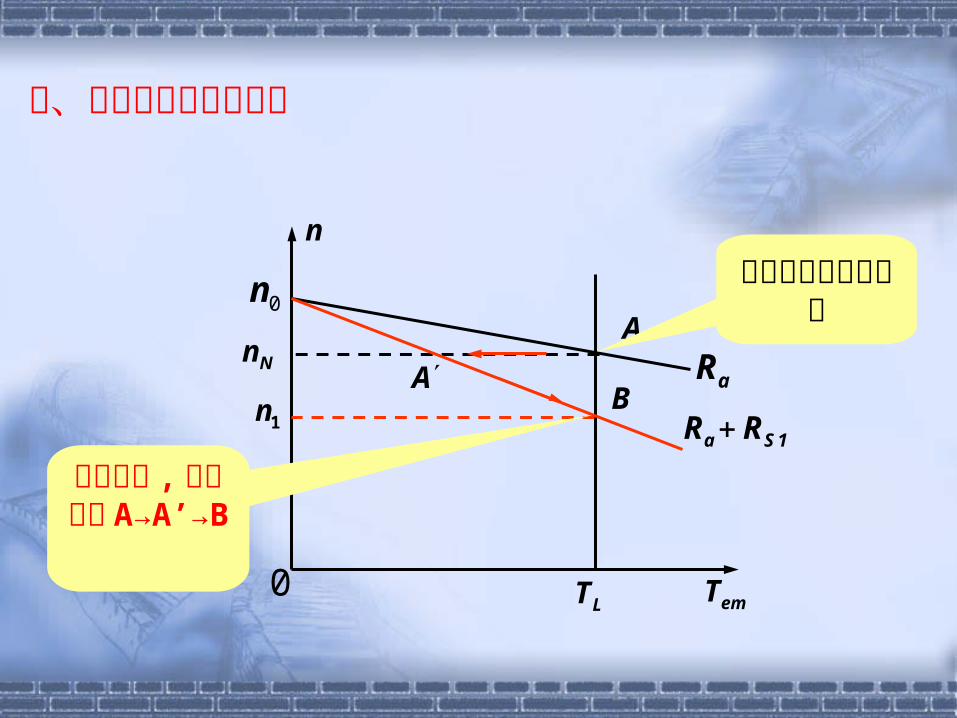
二、电枢电路串电阻调速
0
aR
n
0n
Nn
LT emT
A
未串电阻时的工作点
1Sa RR 1nA
B
串电阻后 ,工作点由 A→A’→B

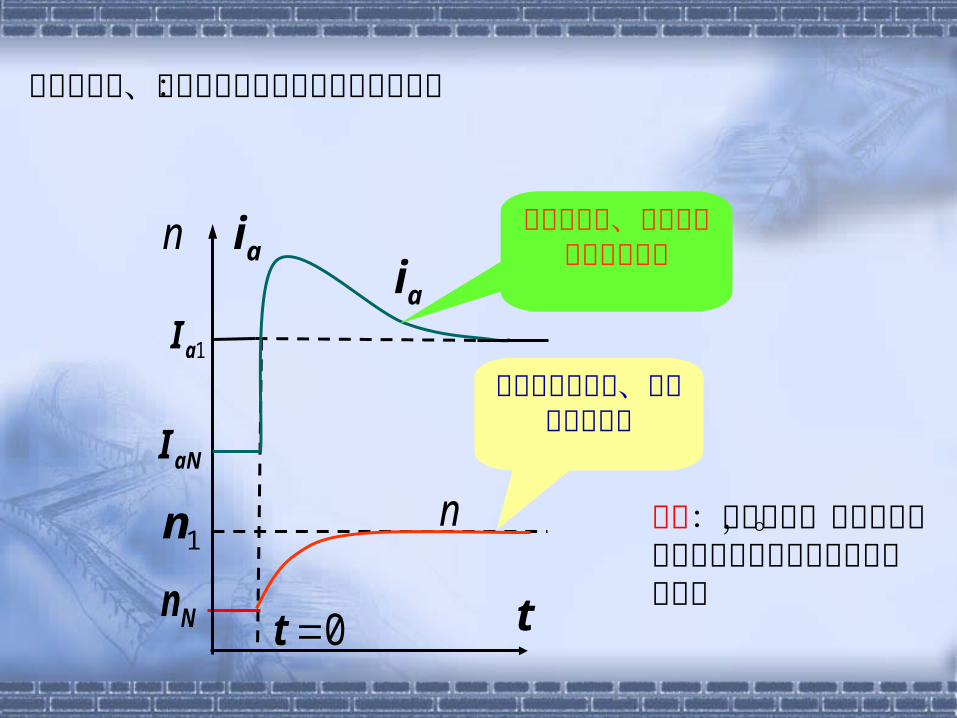
调速过程中电流和转速的变化情况:
ain
aNI
Nn
1n
0t t0
ai
n
调速过程电流变化曲线 :调速前、后电流不变
调速过程转速变化曲线
结论:带恒转矩负载时 ,串电阻越大 ,转速越低。

优点:电枢串电阻调速设备简单,操作方便。
缺点:1)由于电阻只能分段调节,所以调速的平滑性差;
2)低速时特性曲线斜率大 ,静差率大 ,所以转速的相对稳定性差
3)轻载时调速范围小,额定负载时调速范围一般为 D≦2;
4)损耗大,效率低,不经济。对恒转矩负载,调速前、后因增通不变而使电磁转矩和电枢电流不变,输入功率不变,输出功率却随转速的下降而下降,减少的部分被串联电阻消耗了。

三、弱磁调速
减弱磁通后,理想空载转速上升 , 曲线的斜率值增大。
NΦ
n
0n
ANn
emT
LT调节磁场前工作点
01n
1Φ
1nB
A弱磁瞬间工作点 A→A‘
弱磁稳定后的工作点
弱磁调速前、后的电枢电流和转速的变化情况:
aNI
n
Nn
1n
1aI
aiai
t0t
n
减弱磁通调速前、后转速变化曲线
减弱磁通前、后的电枢电流变化曲线
结论:磁场越弱,转速越高。因此电机运行时励磁回路不能开路。

优点:
由于在电流较小的励磁回路中进行调节,因而控制方便,能量损耗小,设备简单,调速平滑性好。弱磁升速后电枢电流增大,电动机的输入功率增大,但由于转速升高,输出功率也增大,电动机的效率基本不变,因此经济性是比较好。
缺点:
1)机械特性的斜率变大,特性变软;
2)转速的升高受到电动机换向能力和机械强度的限制,升速范围不可能很大,一般 D≤2;
为了扩大调速范围,通常把降压和弱磁两种调速方法结合起来,在额定转速以上,采用弱磁调速,在额定转速以下采用降压 调速。
四、降低电枢电压调速
Tem
0nn
NU
TL
NnA
调速压前工作点 A
1U
01n A’
B1n
降压瞬间工作点
稳定后工作点
降压调速过程与电枢串电阻调速过程相似,调速过程中转速和电枢电流(或转矩)随时间变化的曲线也相似。
优点:1)电源电压能够平滑调节,可实现无级调速。
2)调速前后的机械特性的斜率不变,硬度较高,负载变化时稳定性好。
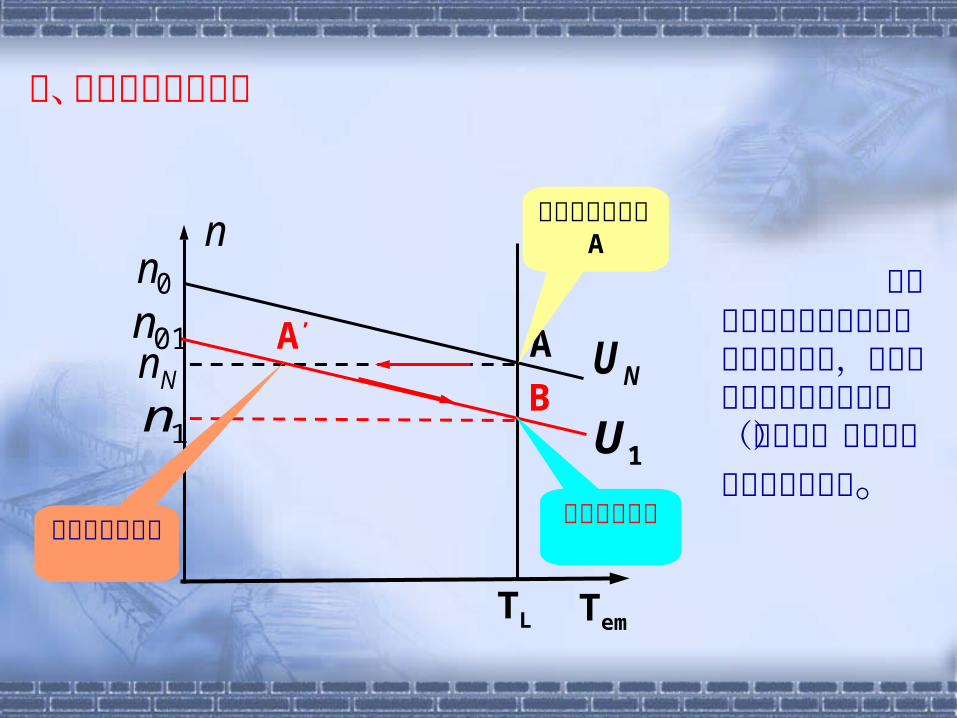
3)无论轻载还是负载,调速范围相同,一般可达 D=2.5 ~ 12。
4)电能损耗较小。
缺点:
需要一套电压可连续调节的直流电源。

第七节 串励直流电动机的电力拖动

一、串励直流电动机的机械特性
(一)固有特性
akIΦ 当磁路不饱和时
kC
TI
kICΦICT
T
ema
aTaTem
2
kC
R
T
U
kC
kCT
ΦCC
R
ΦC
Un
eeme
Tem2
Tee
Te
m
nA
BC
磁路不饱和时的机械特性曲线 AB段
当磁路饱和时,磁通基本不变,机械特性与他励直流电动机的机械特性相似。
磁路饱和时的机械特性曲线 BC段
aN RR,UU 固有特性是指当 时的特性,具有以下特点
( 1)它是一条非线性的软特性,负载时转速降落很大;
00000 n,ΦU/Cn,Φ,I,T eaem ( 2)空载时, 为无穷大。实际上,空载时存在剩磁, 为有限值,但值也很大——“飞车”现象。因此串励电动机不允许空载或轻载运行。
0n
( 3)由于 ,起动和过载时电枢电流大,故串励电动机的起动转矩大,过载能力强。
2aem IT
(二)人为特性
1、电枢串电阻的人为特性 串入电阻后,转速降增大,所以电枢串电阻的人为特性在固有特性的下方,且特性变得更软。
2、降低电压的人为特性 降低电压时,理想空载转速下降,人为特性下移。电压下降后,电枢反电动势随之减少,转速必然减少,所以降低电压的人为特性位于固有特性下方。
3、改变磁通的人为特性
改变磁通的方法是在励磁绕组上并联一个分流电阻。与固有特性相比,在电枢电流相等情况下,励磁电流减少,磁通减少,所以人为特性位于固有特性上方。
二、串励电动机的起动和调速
为了限制起动电流,串励电动机的起动方法与他励电动机一样,也采用电枢串电阻和降低电源电压起动。
串励电动机的调速也采用电枢串电阻、降压和弱磁三种方法,其中串电阻常用,弱磁用得较少。
三、串励电动机的制动 串励电动机若不考虑剩磁,理想空载转速为无穷大,因此不能有回馈制动。
串励电动机的制动只有能耗和反接制动。
能耗制动分他励磁式和自励式,反接制动分电压反接和倒拉反转反转反接制动。


















