
ιάλεξη 5 - NTUAcw.mech.ntua.gr/ml23065/slidesF2013/... · ης 𝜃1−𝜃2) και ης...
39
Δυναμική Μηχανών I Διάλεξη 5 Χειμερινό Εξάμηνο 2013 Τμήμα Μηχανολόγων Μηχ., ΕΜΠ 1
Transcript of ιάλεξη 5 - NTUAcw.mech.ntua.gr/ml23065/slidesF2013/... · ης 𝜃1−𝜃2) και ης...

Δυναμική Μηχανών I
Διάλεξη 5
Χειμερινό Εξάμηνο 2013
Τμήμα Μηχανολόγων Μηχ., ΕΜΠ
1

Περιεχόμενα: Μοντελοποίηση Μηχανικών-Ηλεκτρικών-Υδραυλικών-Θερμικών Συστημάτων
• Επανάληψη: – Εξισώσεις Lagrange σε συστήματα N Β.Ε.
• Μοντελοποίηση Ηλεκτρικών & Υδραυλικών Συστημάτων – Διακριτά στοιχεία, μεταβλητές ισχύος, ενέργεια & ισχύς
– Μεταβλητές σθένους και ροής
– Τετράεδρα κατάστασης
• Πηγές και Καταβόθρες Ισχύος
• Εφαρμογή: Copenhagen Wheel 2

Ανακοινώσεις
• Όποιος ενδιαφέρεται να συμμετάσχει στο μάθημα MATLAB/simulink για την επίλυση των εξισώσεων κίνησης δυναμικών συστημάτων να στείλει email:
• Office Hours:
– Δευτέρα 1-3 ή Παρασκευή 1-3μμ
• Το web site του μαθήματος λειτουργεί κανονικά
– Διαλέξεις, σημειώσεις, βιβλιογραφία
http://cw.mech.ntua.gr/ml23065
3

Copenhagen Wheel
4

Επανάληψη: Εξισώσεις Langrange
5

Εξισώσεις Lagrange (Κλασσική Μορφή)
• Υπολογισμός κινητικής 𝑇 & δυναμικής ενέργειας 𝑉 ως συνάρτηση των 𝐪, 𝒒 .
• Για κάθε B.E., η αντίστοιχη εξίσωση κίνησης είναι:
– όπου η γενικευμένη δύναμη 𝜉𝑗 είναι:
𝑑
𝑑𝑡
𝜕𝑇 𝐪, 𝒒
𝜕𝑞 𝑗−𝜕𝑇 𝐪, 𝒒
𝜕𝑞𝑗+𝜕𝑉 𝐪
𝜕𝑞𝑗= 𝜉𝑗 , 𝑗 = 1,2,… ,𝑁
𝜉𝑗 = (𝜕𝒓𝐹𝑖𝜕𝑞𝑗
)𝑇∙ 𝑭𝑖
𝑁𝐹𝑜𝑟𝑐𝑒
𝑖=1
+ (𝜕𝝎𝑖
𝜕𝑞𝑗)𝑇∙ 𝚻𝑖
𝑁𝑇𝑜𝑟𝑞𝑢𝑒
𝑖=1
j-ιοστή στήλη του Ιακωβιανού 𝑱F𝑖(𝒒) της θέσης 𝒓𝐹𝑖(𝒒) όπου ασκείται η δύναμη 𝑭𝑖 ως προς τους Β.Ε. 𝒒
j-ιοστή στήλη του Ιακωβιανού πίνακα 𝑱𝛚𝑖(𝒒) της γωνιακής ταχύτητας του σώματος που ασκείται η ροπή 𝚻𝑖 6

Μέθοδος Lagrange (Μητρωϊκή)
• Υπολογισμός των μητρώων μάζας 𝚳, ελαστικότητας 𝚱
• Αντί παραγώγισης ως προς κάθε Β.Ε. 𝑞𝑗 ξεχωριστά,
παραγώγιση ως προς το διάνυσμα 𝒒 των Β.Ε.
𝑑
𝑑𝑡
𝜕𝑇
𝜕𝒒 −𝜕𝑇
𝜕𝒒+𝜕𝑉
𝜕𝒒= 𝝃
𝑑
𝑑𝑡
𝜕𝑇
𝜕𝑞 1…
𝑑
𝑑𝑡
𝜕𝑇
𝜕𝑞 Ν
𝜕𝑇
𝜕𝑞1…𝜕𝑇
𝜕𝑞Ν
𝜕𝑉
𝜕𝑞1…𝜕𝑉
𝜕𝑞Ν
𝜉1…𝜉𝑁
Δυνάμεις βαρύτητας
Μη γραμμικές δυνάμεις
Εξωτερικές δυνάμεις/ροπές
Δυνάμεις αδράνειας
Δυνάμεις ελαστικότητας
Δυνάμεις απόσβεσης
7

Μέθοδος Lagrange (Μητρωϊκή Μορφή)
𝚳 𝐪 ∙ 𝒒 + 𝐂 𝒒 ∙ 𝒒 + 𝑲 ∙ 𝒒 = 𝝃𝑔𝑟𝑎𝒗 + 𝝃𝑛𝑜𝑛𝑙𝑖𝑛 + 𝑱𝑖𝑇 ∙ 𝑭𝑖
𝑁𝐹𝑜𝑟𝑐𝑒
𝑖=1
+ 𝑱𝑇,𝑖𝑇 ∙ 𝚻𝑖
𝑁𝑇𝑜𝑟𝑞𝑢𝑒
𝑖=1
Δυνάμεις βαρύτητας
Μη γραμμικές δυνάμεις
Εξωτερικές δυνάμεις Εξωτερικές
ροπές Δυνάμεις αδράνειας
Δυνάμεις ελαστικότητας
Δυνάμεις απόσβεσης
𝝃𝑛𝑜𝑛𝑙𝑖𝑛 𝒒, 𝒒 = −𝑑𝚳 𝐪
𝑑𝑡∙ 𝒒 +
1
2
𝜕(𝒒 𝑇 ∙ 𝚳(𝐪) ∙ 𝒒 )
𝜕𝒒
𝝃𝑔𝑟𝑎𝑣𝑖𝑡𝑦 = −𝜕𝑉𝑔𝑟𝑎𝑣𝑖𝑡𝑦 𝐪
𝜕𝒒
8

Σχετική θέση ακροδεκτών ελατηρίου/αποσβεστήρα
• Έστω «1» και «2» οι ακροδέκτες ενός ελατηρίου/αποσβεστήρα
• Η σχετική θέση των ακροδεκτών μπορεί να επιλεγεί με δύο τρόπους – Επιλογή επιρεάζει την φορά των αντίστοιχων δυνάμεων
𝑓𝑐 = 𝑐 ∙ 𝑢1 − 𝑢2 = 𝑐 ∙ 𝑥 1 − 𝑥 2
𝑢1
𝒇𝑐 𝒇𝑐
m2 m1
𝑐
𝑢2
m2 m1
𝛿𝑟𝑐 = 𝑥1 − 𝑥2
𝒇𝑐
𝑐
𝒇𝑐
𝑓𝑐 = 𝑐 ∙ 𝑢2 − 𝑢1 = 𝑐 ∙ 𝑥 2 − 𝑥 1
𝒇𝑐 𝒇𝑐 m2 m1
𝛿𝑟𝑐 = 𝑥2 − 𝑥1
𝒇𝑐
𝑐
𝒇𝑐
Επιλογή 1 Επιλογή 2
1 2 1 2
9

Μοντελοποίηση Μηχανικών, Ηλεκτρικών και Υδραυλικών Συστημάτων
10

Μηχανικά Συστήματα (Μεταφορική Κίνηση)
• Μεταβλητές ισχύος 𝑃 = 𝐸 = 𝑭 ∙ 𝒖
– Δύναμη 𝑭, ταχύτητα 𝒖 = 𝒙
• Στοιχεία αποθήκευσης ενέργειας
– Μάζα 𝑚:
– Ελαστικότητα (γραμμική) 𝑘:
• Στοιχεία καταστροφής ενέργειας
– Απόσβεση (γραμμική) 𝑐
𝑭 = 𝑚 ∙ 𝒖
𝑭 = −𝑘 ∙ 𝒙
𝐸(𝑭) = 𝑉 =1
2𝑭(𝒙)𝑇 ∙ 𝒙 =
1
2∙ 𝑘 ∙ 𝒙 2 =
1
2∙ 𝑘−1 ∙ 𝑭 2
𝑭 = −𝑐 ∙ 𝒖
𝐸(𝒖) = 𝑇 =1
2𝑳(𝒖)𝑇 ∙ 𝒖 =
1
2∙ 𝑚 ∙ 𝒖 2
11

Μηχανικά Συστήματα (Περιστροφική Κίνηση)
• Μεταβλητές ισχύος 𝑃 = 𝐸 = Τ ∙ 𝜔
– Ροπή Τ, γωνιακή ταχύτητα 𝜔 = 𝜃
• Στοιχεία αποθήκευσης ενέργειας
– Ροπή αδράνειας Ι:
– Ελαστικότητα (γραμμική)𝑘𝑇:
• Στοιχεία καταστροφής ενέργειας
– Απόσβεση (γραμμική) 𝑐𝑇
Τ = Ι ∙ ω
Τ = −𝑘𝑇 ∙ 𝜃
𝐸(Τ) = 𝑉 =1
2𝑇(𝜃) ∙ 𝜃 =
1
2∙ 𝑘𝑇 ∙ 𝜃
2 =1
2∙ 𝑘𝑇
−1 ∙ 𝑇2
𝑇 = −𝑐𝑇 ∙ 𝜔
𝐸(𝜔) = 𝑇 =1
2𝐻(𝜔) ∙ 𝜔 =
1
2∙ Ι ∙ ω2
12

Ηλεκτρικά Συστήματα
• Μεταβλητές ισχύος 𝑃 = 𝐸 = i ∙ 𝑉
– Διαφορά τάσης V, ένταση ρεύματος i = 𝑞
• Στοιχεία αποθήκευσης ενέργειας
– Eπαγωγέας (πηνίο) L:
– Πυκνωτής 𝐶:
• Στοιχεία καταστροφής ενέργειας
– Αντίσταση 𝑅
V = L ∙ i
𝑉 = 𝐶−1 ∙ 𝑞
𝐸 𝑉 =1
2∙ 𝐶−1 ∙ 𝑞2 =
1
2∙ 𝐶 ∙ 𝑉2
𝑉 = 𝑅 ∙ 𝑖
𝐸(𝑖) =1
2∙ L ∙ i2
13

Υδραυλικά Συστήματα
• Μεταβλητές ισχύος 𝑃 = 𝐸 = Q ∙ 𝑃
– Διαφορά πίεσης P, παροχή Q = 𝑉
• Στοιχεία αποθήκευσης ενέργειας
– Αδράνεια L:
– Πυκνωτής 𝐶:
• Στοιχεία καταστροφής ενέργειας
– Αντίσταση 𝑅
P = L ∙ Q
𝑃 = 𝐶−1 ∙ 𝑉
𝐸 𝑃 =1
2∙ 𝐶−1 ∙ 𝑉2 =
1
2∙ 𝐶 ∙ 𝑃2
𝑃 = 𝑅 ∙ 𝑄
𝐸(𝑄) =1
2∙ L ∙ Q2
14

Σύγκριση Απλών Συστημάτων
• Μηχανικό σύστημα
– Κοινή ταχύτητα 𝑢
– Ισορροπία δυνάμεων: 𝐹 𝑡 = 𝐹𝑘 + 𝐹𝑚 + 𝐹𝑐
• Ηλεκτρικό σύστημα
– Κοινό ρεύμα 𝑖
– Νόμος Kirchoff: 𝑉 𝑡 = 𝑉𝐶 + 𝑉𝐿 + 𝑉𝑅
• Υδραυλικό σύστημα
– Κοινή παροχή Q
– Πτώση πίεσης: 𝑃𝑝𝑢𝑚𝑝 𝑡 = 𝑃𝐶 + 𝑃𝐿 + 𝑃𝑅
15

Αντιστοιχία Συστημάτων
Mηχανικό σύστημα Ηλεκτρικό σύστημα
Υδραυλικό σύστημα
Β. Ε. Θέση 𝒙 Φορτίο 𝑞 Όγκος 𝑉
«Ροή» Ταχύτητα 𝒖 = 𝒙 Ένταση i = 𝑞 Παροχή Q = 𝑉
«Σθένος» Δύναμη 𝑭 Διαφορά δυναμικού V
Διαφορά πίεσης P
Στοιχείο Αδράνειας / «Κινητική ενέργεια»
Μάζα 𝑚 𝐅 = 𝑚 ∙ 𝒖
𝐸(𝒖) =1
2∙ 𝑚 ∙ 𝒖 2
Επαγωγέας L V = 𝐿 ∙ 𝑖
𝐸(𝑖) =1
2∙ L ∙ i2
Aδράνεια L P = 𝐿 ∙ 𝑄
𝐸(𝑄) =1
2∙ L ∙ Q2
Στοιχείο Ελαστικότητας / «Δυναμική ενέργεια»
Γραμμικό ελατήριο 𝑘 𝑭 = 𝑘 ∙ (𝒙1 − 𝒙2)
𝐸(𝑭) =1
2∙ 𝑘 ∙ 𝒙 2
Πυκνωτής 𝐶 𝑉 = 𝐶−1 ∙ 𝑖
𝐸 𝑞 =1
2∙ 𝐶−1 ∙ 𝑞2
Πυκνωτής 𝐶 𝑃 = 𝐶−1 ∙ 𝑄
𝐸 𝑉 =1
2∙ 𝐶−1 ∙ 𝑉2
Στοιχείο Απόσβεσης
Γραμμικός αποσβεστ. 𝑐 𝑭 = 𝑐 ∙ (𝒖𝟏 − 𝒖𝟐)
Aντίσταση R V = 𝑅 ∙ 𝑖
Aντίσταση R P = 𝑅 ∙ 𝑄
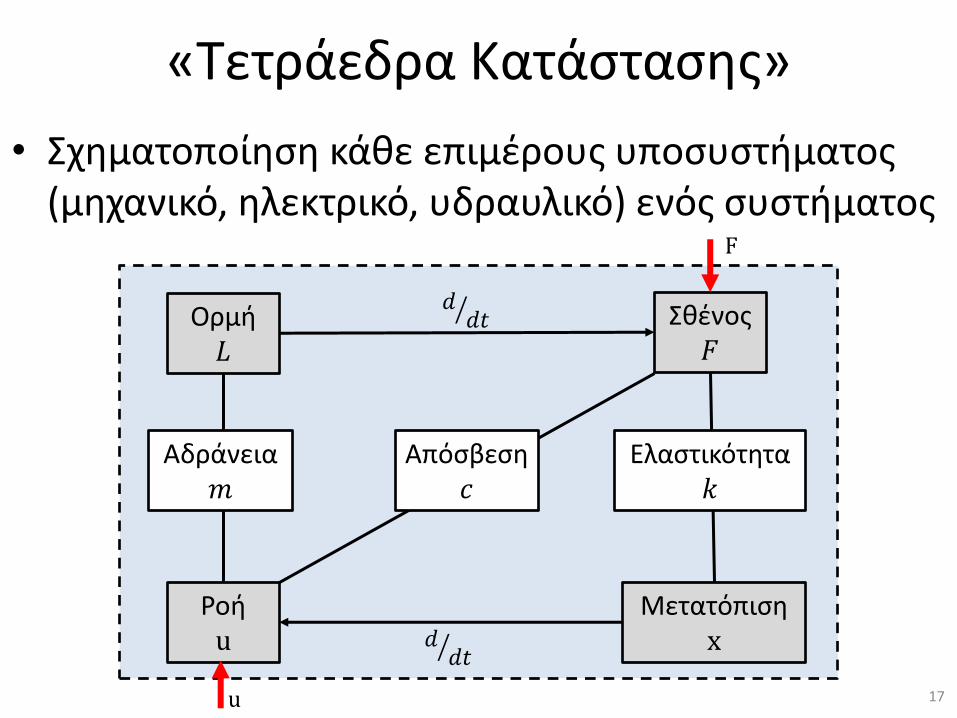
«Τετράεδρα Κατάστασης»
• Σχηματοποίηση κάθε επιμέρους υποσυστήματος (μηχανικό, ηλεκτρικό, υδραυλικό) ενός συστήματος
17
Σθένος 𝐹
Ροή u
Μετατόπιση x
Ορμή 𝐿
Αδράνεια 𝑚
Ελαστικότητα𝑘
Απόσβεση 𝑐
u
F
𝑑𝑑𝑡
𝑑𝑑𝑡

Μετασχηματιστές & Αναστροφείς
• Στοιχεία που ενώνουν διαφορετικά υποσυστήματα
– Περιγράφουν αλληλεπιδράσεις υποσυστημάτων
• Αντιστοιχούν σε περιορισμούς μεταξύ των μεταβλητών ισχύος των υποσυστημάτων
• Μετασχηματιστής
• Αναστροφέας
18
Τ Σύστημα
2 Σύστημα
1
G
F1 F2
u1 u2
F1 F2
u1 u2
Σύστημα 2
Σύστημα 1

Μετασχηματιστές & Αναστροφείς
• Ιδανικοί μετασχηματιστές & αναστροφείς: όχι απώλεια ισχύος
– Μετασχηματιστής
– Αναστροφέας
19
Τ
G
F1 F2
u1 u2
F1 F2
u1 u2
Σύστημα 2
Σύστημα 1
Σύστημα 2
Σύστημα 1
F2u2
=𝑇 00 𝑇−1
∙F1u1
F2u2
=0 𝐺𝐺−1 0
∙F1u1
Σταθερά μεταχηματιστή
Σταθερά αναστροφέα
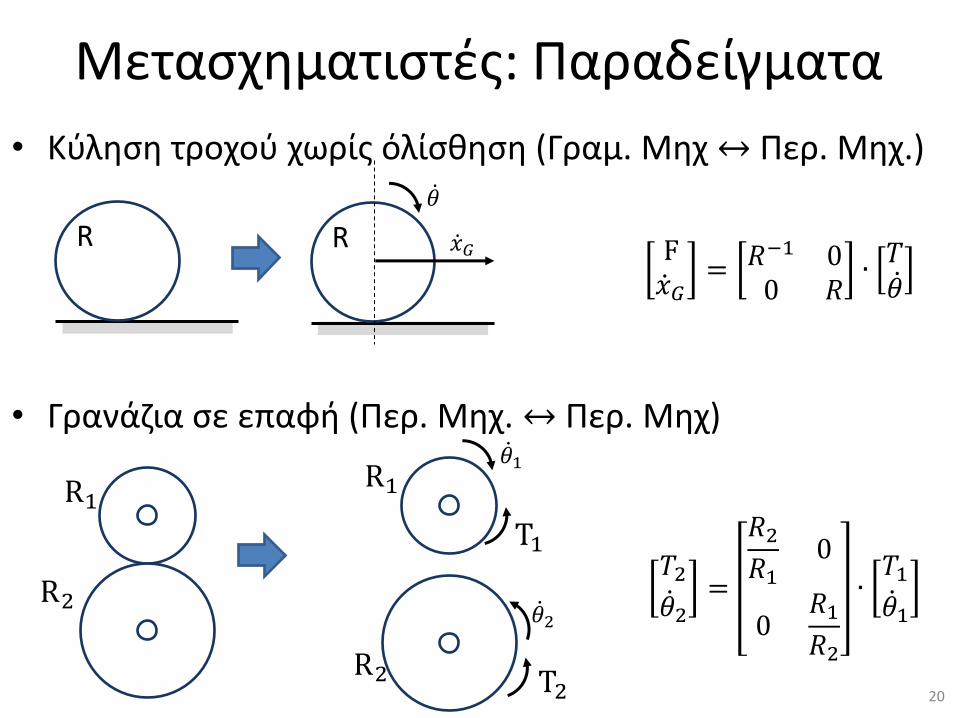
Μετασχηματιστές: Παραδείγματα
• Κύληση τροχού χωρίς όλίσθηση (Γραμ. Μηχ ↔ Περ. Μηχ.)
• Γρανάζια σε επαφή (Περ. Μηχ. ↔ Περ. Μηχ)
20
R R F𝑥 𝐺
= 𝑅−1 00 𝑅
∙𝑇𝜃
R1
R2
R1
R2
𝑥 𝐺
𝜃
𝜃 1
𝜃 2
T1
T2
𝑇2𝜃 2
=
𝑅2𝑅1
0
0𝑅1𝑅2
∙𝑇1𝜃 1

Μετασχηματιστές: Παραδείγματα
• Υδραυλικό έμβολο/αντλία θετικής μετατόπισης (Υδραυλικό ↔Γραμ. Μηχ)
• Ηλεκτρικός μετασχηματιστής (Ηλεκτρικό ↔ Ηλεκτρικό)
21
F𝑥 =
𝐴 00 𝐴−1
∙𝑃𝑄
𝑉2𝑖2
=𝑇 00 𝑇−1
∙𝑉1𝑖1
Α
𝑥 𝐹 𝑄
𝑃
i1 i2 V1 V2
+ +
− −

Αναστροφείς: Παραδείγματα
• Αντλία/υδροστρόβιλος (Υδραυλικό ↔Περιστρ. Μηχ)
• Ηλεκτροκινητήρας/γεννήτρια (Ηλεκτρικό ↔ Περιστρ. Μηχ)
22
Τ𝜃
=0 𝐾𝐾−1 0
∙P𝑄
Τ𝜃
=0 𝑘𝑇𝑘𝑇−1 0
∙V𝑖
𝑉
+
−
𝑖
𝜃
T
𝑃
+
−
𝑄
𝜃
T

Γενικευμένες Εξισώσεις Lagrange
• Κατάστρωση δυναμικών εξισώσεων σε συστήματα που περιέχουν μηχανικά,ηλεκτρικά&υδραυλικά υποσυστήματα
• Χρήση γενικευμένης κινητικής και δυναμικής ενέργειας
23
𝑇𝑠𝑦𝑠𝑡𝑒𝑚 = 𝑇𝑚𝑒𝑐ℎ + 𝑇𝑒𝑙𝑒𝑐𝑡𝑟 + 𝑇ℎ𝑦𝑑𝑟 =1
2∙ 𝑚 ∙ 𝑥 2 +
1
2∙ L ∙ 𝑞 2 +
1
2∙ L ∙ 𝑉 2
𝑉𝑠𝑦𝑠𝑡𝑒𝑚 = 𝑉𝑚𝑒𝑐ℎ + 𝑉𝑒𝑙𝑒𝑐𝑡𝑟 + 𝑉ℎ𝑦𝑑𝑟 =1
2∙ 𝑘 ∙ 𝑥2 +
1
2∙ 𝐶−1 ∙ 𝑞2 +
1
2∙ 𝐶−1 ∙ 𝑉2
𝑑
𝑑𝑡
𝜕𝑇𝑠𝑦𝑠𝑡𝑒𝑚
𝜕𝑞 𝑗−𝜕𝑇𝑠𝑦𝑠𝑡𝑒𝑚
𝜕𝑞𝑗+𝜕𝑉𝑠𝑦𝑠𝑡𝑒𝑚
𝜕𝑞𝑗= 𝜉𝑗 , 𝑗 = 1,2, … , 𝑁
Βαθμοί ελευθερίας μπορεί να είναι θέσεις/γωνίες (μηχανικά συστήματα), ηλεκτρικά φορτία (ηλεκτρικά συστήματα), ή όγκοι (υδραυλικά συστήματα).
Πηγές/Καταβόθρες Ενέργειας
24

Πηγές/Καταβόθρες Ισχύος
• Κάθε υποσύστημα έχει σημεία εισόδου/παροχης ισχύος (πηγές) και εξόδου/κατανάλωσης ισχύος (καταβόθρα)
• Μηχανικά υποσυστήματα
– Θερμικές μηχανές, ηλεκτρικοί κινητήρες, στρόβιλοι, υδραυλικά έμβολα
– Μηχανικά φορτία, αντλίες/συμπιεστές, γεννήτριες
• Ηλεκτρικά υποσυστήματα
– Μπαταρίες, ηλεκτρικές γεννήτριες
– Ηλεκτρικοί κινητήρες, μπαταρίες
• Υδραυλικά υποσυστήματα
– Αντλίες, συμπιεστές
– Στρόβιλοι, υδραυλικοί κύλινδροι 25

Πηγές/Καταβόθρες Ισχύος
• Toyota Hybrid System (Hybrid Synergy Drive)
26
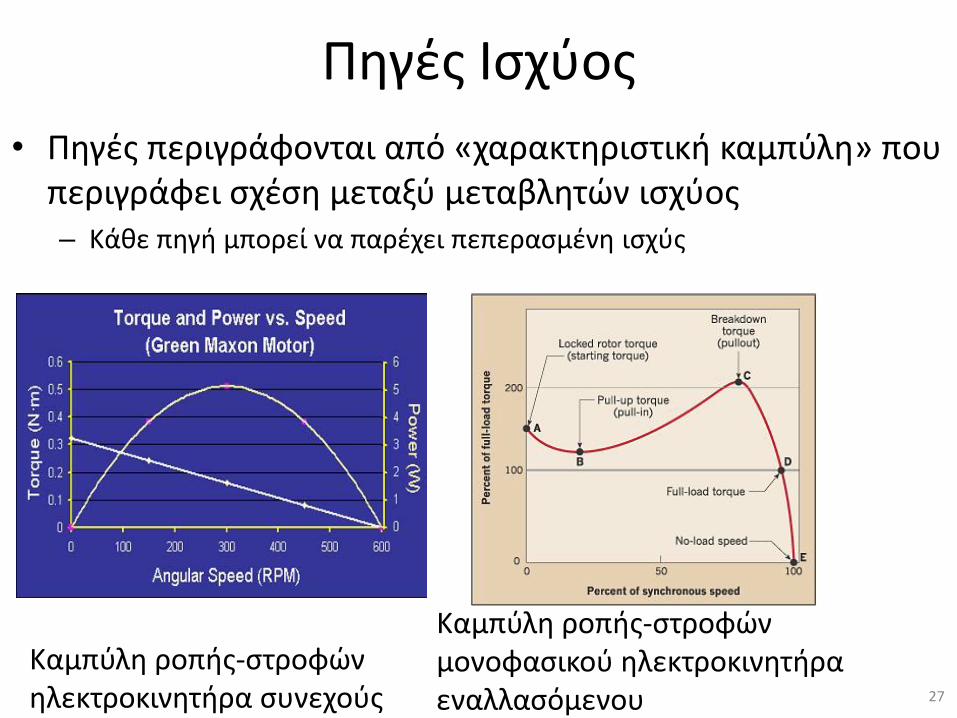
Πηγές Ισχύος
• Πηγές περιγράφονται από «χαρακτηριστική καμπύλη» που περιγράφει σχέση μεταξύ μεταβλητών ισχύος – Κάθε πηγή μπορεί να παρέχει πεπερασμένη ισχύς
27
Καμπύλη ροπής-στροφών ηλεκτροκινητήρα συνεχούς
Καμπύλη ροπής-στροφών μονοφασικού ηλεκτροκινητήρα εναλλασόμενου

Πηγές Ισχύος
• Πηγές περιγράφονται από «χαρακτηριστική καμπύλη» που περιγράφει σχέση μεταξύ μεταβλητών ισχύος – Κάθε πηγή μπορεί να παρέχει πεπερασμένη ισχύς
28
Καμπύλη ροπής-στροφών κινητήρα diesel
Καμπύλη πίεσης-παροχής αντλίας

Πηγές/Καταβόθρες Ισχύος
• Αναλυτικά μοντέλα που μοντελοποιούν την συμπεριφορά πηγών ισχύος
1. Μοντέλο Thevenin
– Ιδανική πηγή σθένους σε σειρά με αντίσταση
2. Μοντέλο Norton
– Ιδανική πηγή ροής παράλληλα με αντίσταση
29
𝑉𝐴𝐵 𝑖 = 𝑉𝑡ℎ − 𝑅𝑡ℎ ∙ i
𝑖𝐴𝐵 𝑉 = 𝑖𝑁𝑜 − 𝑅𝑁𝑜−1 ∙ 𝑉
Εφαρμογή: Copenhagen Wheel
30

Εξαρτήματα
31

Ροπόμετρο (torque sensor)
• Ένα στρεπτικό ελατήριο σταθεράς k .
• Στρεπτικό ανάλογο του strain gauge
• Δύο άτρακτοι συνδέονται σε κάθε άκρο του
• Η ροπή Τ που περνά διαμέσω του ελατηρίου εκτιμάται μέσω της γωνιακής παραμόρφωσης δθ του ροπόμετρου
32
Τ = k ∙ 𝛿𝜃

Άξονας
33
Μη περιστρεφόμενος άξονας
Έδρανο Έδρανο
Αισθητήρας ροπής
Γρανάζι πεταλιού
Περιστρεφόμενος άξονας
Ρόδα
Κινητήρας

Ροπές στην Άτρακτο
• Πηγές ισχύος στην άτρακτο
– Ροπή T𝑝𝑒𝑑𝑎𝑙 που παρέχει ο ποδηλάτης (ευθεία κίνηση καστάνιας)
– Ροπή T𝑚 που παρέχει ο κινητήρας (όταν ενεργοποιηθεί)
• Καταβόθρες ισχύος από την άτρακτο
– Ροπή φορτίου T𝑤ℎ𝑒𝑒𝑙 = 𝑅𝑤ℎ𝑒𝑒𝑙 ∙ 𝐹𝑤ℎ𝑒𝑒𝑙 λόγω της δύναμης 𝐹𝑤ℎ𝑒𝑒𝑙 που ασκείται από το έδαφος στο λάστιχο (μέσω τριβής)
– 𝐹𝑤ℎ𝑒𝑒𝑙 ισούται με την απαιτούμενη δύναμη για:
• Υπερνίκηση αντιστάσεων (ροπή κύληση, αεροδυναμική αντίσταση)
• Αδρανειακών δυνάμεων (επιτάχυνση)
34

Μοντέλο Kίνησης Ατράκτου
35
Ι1 Ι2 c1 c2
θ1 θ2
𝑘
T𝑚 T𝑤ℎ𝑒𝑒𝑙 T𝑝𝑒𝑑𝑎𝑙
𝑇 =1
2𝐼1θ1
2+1
2𝐼2θ2
2=1
2𝒒 Τ
𝐼1 00 𝐼2
𝒒 ⟹ 𝑴 =𝐼1 00 𝐼2
𝒒 =θ1θ2
V =1
2𝑘(𝜃1 − 𝜃2)
2=1
2𝒒Τ
𝑘 −𝑘−𝑘 𝑘
𝒒 ⟹𝑲 =𝑘 −𝑘−𝑘 𝑘
δW = δ𝜃1 ∙ (𝑇𝑚 − 𝑇𝑤ℎ𝑒𝑒𝑙 − 𝑐1 ∙ 𝜃 1) + δ𝜃2 ∙ (𝑇𝑝𝑒𝑑𝑎𝑙 −𝑐2∙ 𝜃 2)
𝐼1 00 𝐼2
𝜃 1𝜃 2
+𝑘 −𝑘−𝑘 𝑘
𝜃1𝜃2
=10
𝑇𝑚 − 𝑇𝑤ℎ𝑒𝑒𝑙 − 𝑐1𝜃 1 +01
(𝑇𝑝𝑒𝑑𝑎𝑙 − 𝑐2𝜃 2)
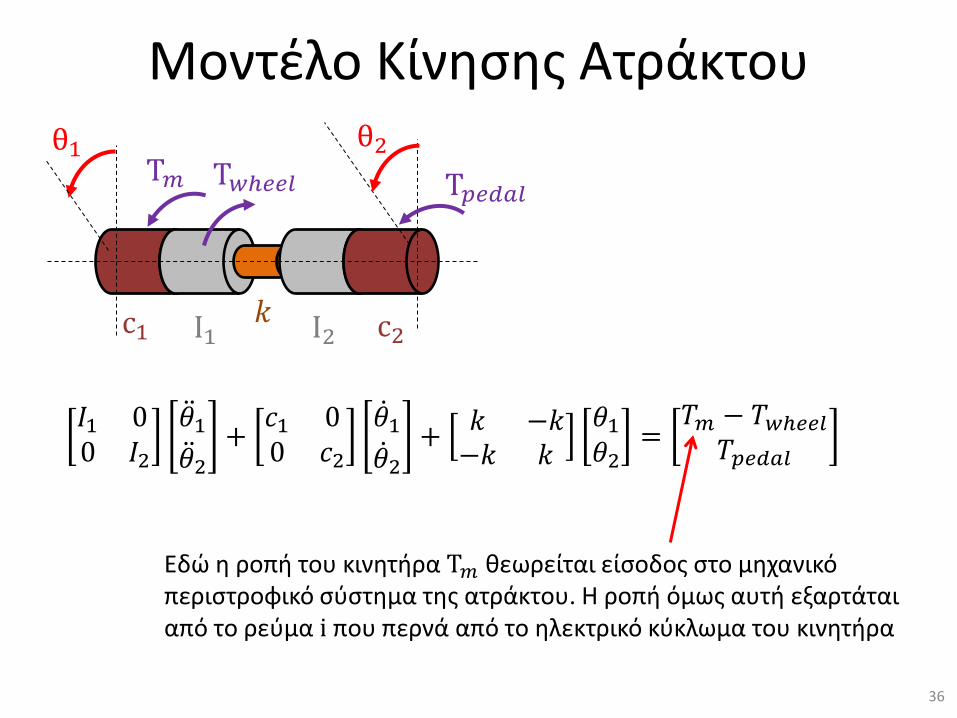
Μοντέλο Kίνησης Ατράκτου
36
Ι1 Ι2 c1 c2
θ1 θ2
𝑘
T𝑚 T𝑤ℎ𝑒𝑒𝑙 T𝑝𝑒𝑑𝑎𝑙
𝐼1 00 𝐼2
𝜃 1𝜃 2
+𝑐1 00 𝑐2
𝜃 1𝜃 2
+𝑘 −𝑘−𝑘 𝑘
𝜃1𝜃2
=𝑇𝑚 − 𝑇𝑤ℎ𝑒𝑒𝑙
𝑇𝑝𝑒𝑑𝑎𝑙
Εδώ η ροπή του κινητήρα Τ𝑚 θεωρείται είσοδος στο μηχανικό περιστροφικό σύστημα της ατράκτου. H ροπή όμως αυτή εξαρτάται από το ρεύμα i που περνά από το ηλεκτρικό κύκλωμα του κινητήρα

Η τάση στους ακροδέκτες του κινητήρα V𝑖𝑛 ισούται με την πτώση τάσης στα πηνεία του κινητήρα λόγω αυτεπαγωγής 𝑉𝐿 , συν την πτώση τάσης 𝑉𝑅 λόγω ωμικών αντιστάσεων, στην την ΑΗΕΔ στον κινητήρα 𝑉𝐵𝐸𝑀𝐹 λόγω της περιστροφής της
ατράκτου 𝜃 1 (νόμος Kirchoff) Ο βαθμός ελευθερίας του συστήματος είναι το φορτίο q που μετατοπίζεται στο σύστημα
Μοντέλο Κινητήρα
37
V𝑖𝑛 = 𝑉𝑅 + 𝑉𝐿 + 𝑉𝐵𝐸𝑀F ⟹ V𝑖𝑛 = 𝑅𝑖 + 𝐿𝑑𝑖
𝑑𝑡+ 𝑉𝐵𝐸𝑀𝐹
V𝑖𝑛 𝑒 = k𝑇𝜃
𝑖 =𝑑𝑞
𝑑𝑡 ⟹ V𝑖𝑛 = 𝑅
𝑑𝑞
𝑑𝑡+ 𝐿
𝑑2𝑞
𝑑𝑡2+ 𝑉𝐵𝐸𝑀𝐹
T𝑚 𝜃 1

Μοντέλο Κινητήρα
38
𝑇𝑚𝜃 1
=0 𝑘𝑇𝑘𝑇−1 0
∙𝑉𝐵𝐸𝑀𝐹𝑖
V𝑖𝑛 𝑒 = k𝑇𝜃
H ΑΗΕΔ 𝑉𝐵𝐸𝑀𝐹 και η ροπή στην άτρακτο 𝑇𝑚 συνδέονται μέσω των εξισώσεων (αντιστροφέας) του κινητήρα
T𝑚 𝜃 1
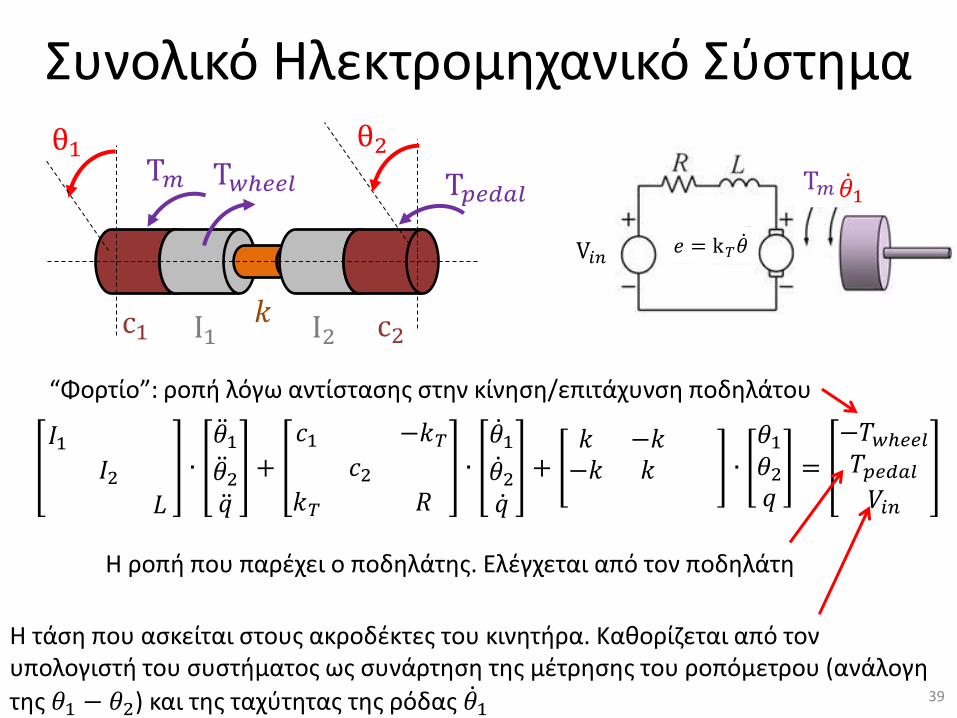
Συνολικό Ηλεκτρομηχανικό Σύστημα
39
Ι1 Ι2 c1 c2
θ1 θ2
𝑘
T𝑚 T𝑤ℎ𝑒𝑒𝑙 T𝑝𝑒𝑑𝑎𝑙
V𝑖𝑛
𝐼1𝐼2
𝐿
∙
𝜃 1𝜃 2𝑞
+
𝑐1 −𝑘𝑇𝑐2
𝑘𝑇 𝑅
∙
𝜃 1𝜃 2𝑞
+𝑘 −𝑘−𝑘 𝑘 ∙
𝜃1𝜃2𝑞
=
−𝑇𝑤ℎ𝑒𝑒𝑙𝑇𝑝𝑒𝑑𝑎𝑙𝑉𝑖𝑛
𝑒 = k𝑇𝜃
T𝑚 𝜃 1
Η ροπή που παρέχει ο ποδηλάτης. Ελέγχεται από τον ποδηλάτη
Η τάση που ασκείται στους ακροδέκτες του κινητήρα. Καθορίζεται από τον υπολογιστή του συστήματος ως συνάρτηση της μέτρησης του ροπόμετρου (ανάλογη
της 𝜃1 − 𝜃2) και της ταχύτητας της ρόδας 𝜃 1
“Φορτίο”: ροπή λόγω αντίστασης στην κίνηση/επιτάχυνση ποδηλάτου


















